一種自適應(yīng)擴(kuò)展卡爾曼濾波在無人直升機(jī)導(dǎo)航系統(tǒng)中的應(yīng)用
2021-11-11 08:56:50杜佳新
無人機(jī) 2021年5期
杜佳新
中國直升機(jī)設(shè)計研究所
精準(zhǔn)的導(dǎo)航信息對于無人直升機(jī)穩(wěn)定飛行控制起著重要的作用。針對慣性導(dǎo)航系統(tǒng)由于慣性測量元件產(chǎn)生的誤差會隨著導(dǎo)航解算的過程不斷累積的問題,通過全球定位系統(tǒng)進(jìn)行組合導(dǎo)航,以四元數(shù)法為基礎(chǔ)建立慣性導(dǎo)航系統(tǒng)的非線性誤差模型。同時針對實際系統(tǒng)中噪聲信號統(tǒng)計特性不完全會干擾濾波精度而影響誤差估計的問題,提出一種自適應(yīng)擴(kuò)展卡爾曼濾波方法,該濾波方法可以在線估計噪聲特性以此保證濾波精度。仿真結(jié)果表明,該濾波方法可以提高組合導(dǎo)航系統(tǒng)的性能。
無人直升機(jī)由于具有可以在空中實現(xiàn)懸停、低空域飛行以及低速持續(xù)飛行的特點,在森林救火、軍事偵察、環(huán)境勘探、農(nóng)業(yè)種植等軍用和民用領(lǐng)域有著廣泛的應(yīng)用。無人直升機(jī)可以減小自身受飛行環(huán)境的影響,滿足在各種復(fù)雜環(huán)境下完成飛行任務(wù)。無人直升機(jī)通過姿態(tài)解算獲取當(dāng)前的姿態(tài)值,并將當(dāng)前的姿態(tài)值作為反饋輸入給飛控系統(tǒng),再進(jìn)行控制律解算。因此,無人直升機(jī)能保持穩(wěn)定飛行的必要條件之一就是精確的姿態(tài)解算。
無人直升機(jī)可以通過慣性導(dǎo)航系統(tǒng)(INS)獲取當(dāng)前的姿態(tài)信息。慣性導(dǎo)航系統(tǒng)具有自主性的特點,通過慣性測量單元即陀螺儀和加速度計、計算機(jī)和穩(wěn)定平臺組成。陀螺儀測量載體相對于慣性空間的角速度,加速度計測量載體相對于慣性空間的線加速度,再通過導(dǎo)航解算得到載體相對于某一基準(zhǔn)坐標(biāo)系的導(dǎo)航參數(shù)。但是由于無人直升機(jī)在飛行時存在自身固有頻率的振動以及電磁干擾,同時慣性測量元件的陀螺漂移和加速度計零偏產(chǎn)生的誤差會隨著導(dǎo)航解算過程不斷累積,這些因素都會造成單獨使用慣性導(dǎo)航系統(tǒng)去進(jìn)行導(dǎo)航解算無法滿足無人直升機(jī)穩(wěn)定飛行控制的精度要求。因此,需要通過另一種導(dǎo)航系統(tǒng)對慣性導(dǎo)航系統(tǒng)(INS)量測數(shù)據(jù)進(jìn)行實時修正即進(jìn)行組合導(dǎo)航。
由于全球衛(wèi)星定位系統(tǒng)(GPS)具有范圍遍布全球、定位精度高、觀測速度快以及受地域和時間的限制很小等多方面的優(yōu)點,因此可以通過全球定位系統(tǒng)(GPS)來修正慣性導(dǎo)航系統(tǒng)(INS)在導(dǎo)航解算時的累積誤差,這樣即保留了導(dǎo)航解算過程的自主性又提升了定位結(jié)果的準(zhǔn)確性和魯棒性。組合導(dǎo)航系統(tǒng)從其本質(zhì)上來看是將系統(tǒng)內(nèi)各個傳感器獲取的導(dǎo)航信息進(jìn)行綜合處理,針對這一處理過程目前國內(nèi)外已經(jīng)有多種理論方法,如最小二乘法、加權(quán)融合法、貝葉斯估計、卡爾曼濾波以及神經(jīng)網(wǎng)絡(luò)法等多種方法。
其中,應(yīng)用于導(dǎo)航領(lǐng)域最為廣泛的是卡爾曼濾波法,通過遞推手段可以實時解算出當(dāng)前的狀態(tài)量,同時還可以對下一次的狀態(tài)量進(jìn)行預(yù)測,但卡爾曼濾波僅適用于系統(tǒng)模型線性下精度較高,而針對此改進(jìn)的擴(kuò)展卡爾曼濾波可以將系統(tǒng)模型非線性的部分進(jìn)行線性化處理,從而提高濾波精度。同樣擴(kuò)展卡爾曼濾波也不適用于所有的情況,在考慮到實際系統(tǒng)模型不完全準(zhǔn)確或不能完全知悉干擾信號的噪聲特性下,會使得直接使用擴(kuò)展卡爾曼濾波方法進(jìn)行狀態(tài)估計的精度下降,甚至有可能導(dǎo)致濾波發(fā)散。
基于此,本文以INS/GPS組合導(dǎo)航作為無人直升機(jī)的導(dǎo)航模塊,在考慮到復(fù)雜飛行環(huán)境下噪聲統(tǒng)計特性未知的條件下,通過在線實時估計量測噪聲和狀態(tài)噪聲的自適應(yīng)擴(kuò)展卡爾曼濾波來進(jìn)行導(dǎo)航參數(shù)解算,并通過仿真驗證該方法的有效性。
INS/GPS組合導(dǎo)航基本原理
組合導(dǎo)航技術(shù)是通過兩種或更多導(dǎo)航設(shè)備來獲取同一運載體的導(dǎo)航信息,并將獲取到的導(dǎo)航信息進(jìn)行綜合處理,以此來提升導(dǎo)航信息的精度。以INS/GPS組合導(dǎo)航系統(tǒng)為例,GPS通過接收機(jī)獲取無人直升機(jī)的速度和位置信息,INS通過陀螺儀和加速度計獲取無人直升機(jī)的速度和位置信息,將兩個導(dǎo)航子系統(tǒng)位置和速度信息的量測量作差值,通過設(shè)計好的濾波器來進(jìn)行狀態(tài)估計得到導(dǎo)航子系統(tǒng)的誤差量,再將估計出的慣導(dǎo)系統(tǒng)導(dǎo)航參數(shù)的誤差值作為反饋來校正慣導(dǎo)系統(tǒng)的導(dǎo)航參數(shù),以此來提升導(dǎo)航參數(shù)的精度。
基于INS/GPS組合導(dǎo)航系統(tǒng)的工作原理如圖1所示。整個組合導(dǎo)航系統(tǒng)的核心部分在于設(shè)計恰當(dāng)?shù)臑V波器,對導(dǎo)航信息進(jìn)行數(shù)據(jù)處理以此得到導(dǎo)航參數(shù)誤差的最優(yōu)估計,然后再根據(jù)最小均方誤差的規(guī)律對慣性導(dǎo)航系統(tǒng)的導(dǎo)航參數(shù)進(jìn)行修正,提高整個導(dǎo)航系統(tǒng)的精度,使無人直升機(jī)的飛行控制更加穩(wěn)定。
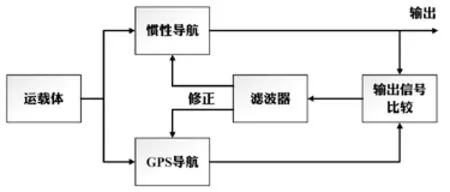
圖1 INS/GPS組合導(dǎo)航系統(tǒng)的工作原理。
INS/GPS組合導(dǎo)航系統(tǒng)誤差模型
INS的誤差狀態(tài)方程
對于慣性導(dǎo)航系統(tǒng)來說,最常見的姿態(tài)解算的方法為四元數(shù)法,既便于計算又可以保證解算精度。本文就通過四元數(shù)法解算慣性導(dǎo)航系統(tǒng)的姿態(tài)矩陣,從而推導(dǎo)出慣性導(dǎo)航系統(tǒng)的誤差模型,從而估計出慣性導(dǎo)航系統(tǒng)的誤差并對其進(jìn)行修正。
導(dǎo)航坐標(biāo)系為東北地坐標(biāo)系,機(jī)體坐標(biāo)系為與無人直升機(jī)機(jī)體本身固聯(lián)的坐標(biāo)系,其中原點O為無人直升機(jī)重心位置,縱軸OX沿著機(jī)身縱軸方向且其正方向與機(jī)頭朝向一致,垂向軸OZ與無人直升機(jī)的槳轂軸平行且與OX軸形成的平面在機(jī)體的對稱平面,其中正方向指向機(jī)體的下方,橫軸OX與XOZ平面垂直且正方向指向機(jī)體的右側(cè)。
若Q=[q0,q1,q2,q3]T為INS真實的四元數(shù),而T為通過解算后得到的計算四元數(shù),則有=Q+δQ其中δQ為真實的姿態(tài)四元數(shù)與計算四元數(shù)的偏差值,根據(jù)慣導(dǎo)解算的四元數(shù)微分方程可得出δQ的具體表達(dá)式即為INS的姿態(tài)誤差方程:

其中,
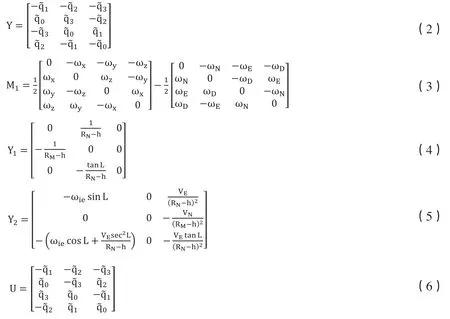
在式(1)~(6)中,用b代表機(jī)體坐標(biāo)系,用n代表導(dǎo)航坐標(biāo)系,用i代表慣性坐標(biāo)系,姿態(tài)誤差四元數(shù)表達(dá)式為δQ=[δq0,δq1,δq2,δq3]T,陀螺測量誤差表達(dá)式為=[εx,εy,εz]T,將陀螺測量誤差進(jìn)行補(bǔ)償后得到的輸出其表達(dá)式為=[ωx,ωy,ωz]T,無人直升機(jī)在導(dǎo)航坐標(biāo)系下的運動相對于慣性空間的角速度在導(dǎo)航坐標(biāo)系下的投影為[ωN,ωE,ωD]T,ωin的誤差表達(dá)式為=[δωN,δωE,δωD]T,INS的速度誤差表達(dá)式為δVn=[δVN,δVE,δVD]T,INS的位置誤差表達(dá)式為δP=[δL,δλ,δh]T(其中L表示無人機(jī)的緯度,λ表示無人機(jī)的經(jīng)度,h表示無人機(jī)的高度),用ωie代表地球自轉(zhuǎn)角速度,用RM代表沿子午圈的曲率半徑,用RN代表沿卯酉圈的曲率半徑。
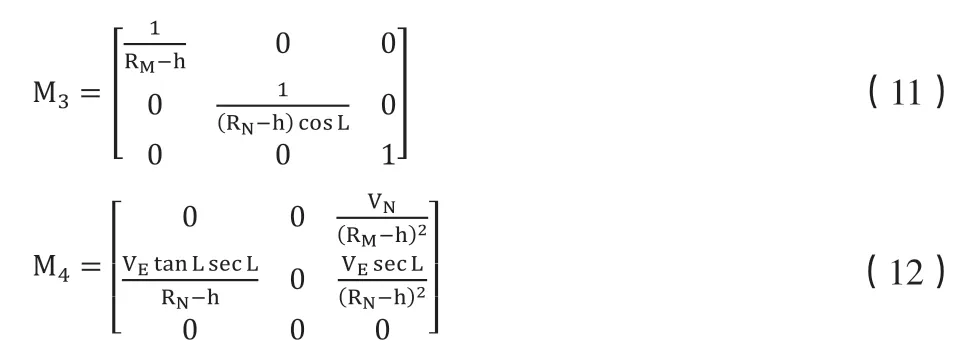
若Vn=[VN,VE,VD]T為INS的真實速度,而[VN,VE,VD]T為經(jīng)過解算后得到的速度,由比力方程分別將Vn、展開,兩者作差忽略δgn可以得到INS的速度誤差方程為:



其中,

其 中,εb=[εbx,εby,εbz]T表 示 陀 螺 零 偏 向 量,εr=[εrx,εry,εrz]T表示一階馬爾可夫過程噪聲向量,Tr表示相關(guān)時間常數(shù),wr=[wrx,wry,wrz]T表示驅(qū)動噪聲向量,wg=[wgx,wgy,wgz]T表示陀螺觀測噪聲向量。 把加速度計量測誤差認(rèn)為是一階馬爾可夫過程,則可以得到加速度計誤差Δb為:

其中,Ta表示相關(guān)時間常數(shù),wa=[wax,way,waz]T表示驅(qū)動噪聲向量。 選取INS的誤差狀態(tài)量為 X(t)=[δq0,δq1,δq2,δq3,δVN,δVE,δVD,δL,δλ,δh,εbx,εby,εbz,εrx,εry,εrz,Δx,Δy,Δz]T,則由式(1)、(7)、(10)、(14)、(15)、(16)組成INS誤差狀態(tài)方程表示為:

W(t)=[wgx,wgy,wgz,wrx,wry,wrz,wax,way,waz]T表示過程噪聲向量。
INS/GPS組合導(dǎo)航系統(tǒng)觀測方程
將INS與GPS分別對運載體的量測信息即速度和位置信息作差,并將其作為INS/GPS組合導(dǎo)航的觀測量,由此可得觀測方程為:
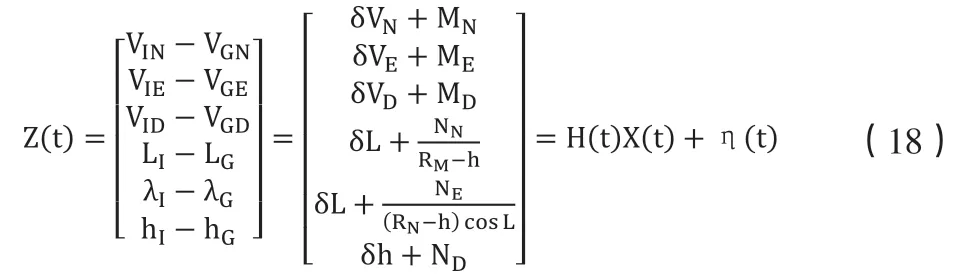
其中,MN、ME、MD表示GPS的速度誤差,NN、NE、ND表示GPS的位置誤差。
自適應(yīng)擴(kuò)展卡爾曼濾波
將INS/GPS組合導(dǎo)航系統(tǒng)狀態(tài)方程(17)和觀測方程(18)進(jìn)行離散化處理,可得到非線性方程為:

其中,Wk和ηk為高斯噪聲,有如下關(guān)系:

對于實際系統(tǒng)來說,可能存在著模型不完全準(zhǔn)確或者噪聲信號統(tǒng)計特性不完全的情況,這會使得標(biāo)準(zhǔn)卡爾曼濾波和擴(kuò)展卡爾曼濾波估計精度下降甚至引起濾波發(fā)散,因此在進(jìn)行濾波之前對于系統(tǒng)噪聲方差Qk和觀測噪聲方差Rk的實時估計就顯得至關(guān)重要,下面具體從狀態(tài)預(yù)測以及狀態(tài)更新兩方面來闡述濾波過程。
狀態(tài)預(yù)測部分由狀態(tài)一步預(yù)測方程和一步預(yù)測均方誤差所組成,如下。
狀態(tài)一步預(yù)測方程:

一步預(yù)測均方誤差:

狀態(tài)更新部分由濾波增益、狀態(tài)估計方程和估計均方誤差所組成,如下。
濾波增益:

狀態(tài)估計方程:

估計均方誤差:

為了能應(yīng)對在復(fù)雜環(huán)境下系統(tǒng)噪聲方差和觀測噪聲方差可能會發(fā)生變化而影響濾波器的精度,現(xiàn)通過對噪聲特性進(jìn)行實時估計以此來得到狀態(tài)量的最優(yōu)估計值。現(xiàn)以k時刻為例,定義新息dk為濾波器實際量測值Zk和估計的觀測值的差值,則有:

由式(27)可知,新息dk把新的觀測值以及濾波器模型參數(shù)的信息全部包括進(jìn)來,這樣提升了在復(fù)雜環(huán)境下濾波器的抗干擾性,新息dk的實時估計方差通過開窗估計法可得:

其中,W表示滑動數(shù)據(jù)窗口長度。


殘差方差為:

濾波增益為:


在式(34)兩邊右乘Rk可得

將式(35)代入式(32)得Rk估計值為

同理可得系統(tǒng)噪聲方差Qk-1估計值為

仿真及分析
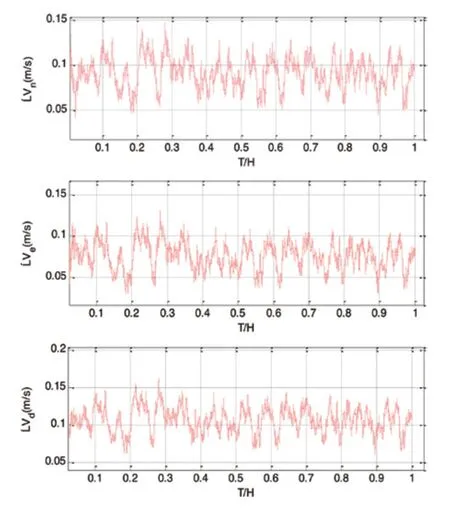
圖2 無人直升機(jī)的速度估計誤差。
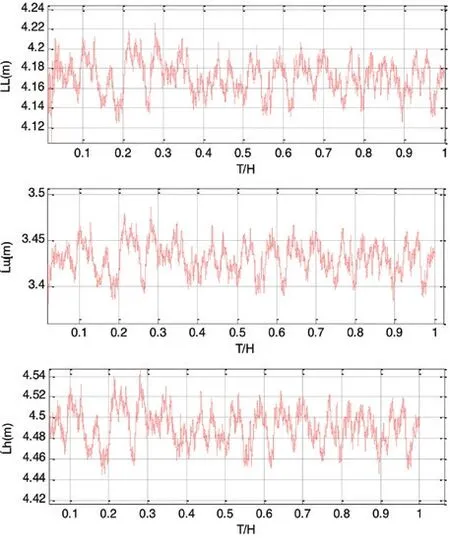
圖3 無人直升機(jī)的位置估計誤差。
結(jié)論
本文從分析組合導(dǎo)航原理出發(fā)以GPS來修正INS導(dǎo)航參數(shù)信息,選取INS的速度誤差以及位置誤差等為狀態(tài)量,并通過四元數(shù)法列寫INS的誤差方程即為狀態(tài)方程;選取INS和GPS對無人直升機(jī)速度和位置量測信息的差值作為觀測量并列寫觀測方程;針對實際系統(tǒng)中噪聲信號統(tǒng)計特性不完全的情況,提出一種對噪聲特性實時估計的自適應(yīng)擴(kuò)展卡爾曼濾波方法。
仿真結(jié)果表明,在噪聲統(tǒng)計特性未知的情況下此種濾波方法能夠有效估計出INS/GPS組合導(dǎo)航系統(tǒng)的速度以及位置誤差。但本文只驗證了此種自適應(yīng)擴(kuò)展卡爾曼濾波方法可以估計出組合導(dǎo)航系統(tǒng)的速度與位置誤差,其濾波效果并未與基本擴(kuò)展卡爾曼濾波進(jìn)行比較,還需要通過仿真對比不同噪聲特性環(huán)境下兩種濾波的效果。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
