剛性共軸雙旋翼動平衡調整方法研究
2021-11-11 08:56:54唐虎生黃安
無人機 2021年5期
關鍵詞:振動
唐虎生,黃安
中國直升機設計研究所
無人直升機槳葉的加工誤差和氣動干擾會引起較大振動響應,剛性共軸雙旋翼無人直升機氣動載荷復雜,振動響應大,其動平衡調整是一項十分重要的工作。本文參考常規構型動平衡調整方法,對剛性共軸雙旋翼無人直升機動平衡調整進行研究,根據雙旋翼氣動特性,采用試重法,簡化雙旋翼配重加載方式,可在地面簡便快捷地調整旋翼動平衡。
無人直升機旋翼系統是升力的來源,也是無人直升機振動的主要來源之一,無人直升機特殊的飛行模式雖具有優良飛行性能,但也一直被振動問題困擾。降低無人直升機振動并提高其飛行品質,是新型無人直升機研制的重難點。由于加工誤差和氣動干擾,旋翼系統工作時,各槳葉離心力和氣動載荷力不相等因素會使旋翼系統產生較大振動。剛性共軸雙旋翼由相反旋轉的上、下兩副剛性旋翼構成,具有體積小,結構緊湊,翼面載荷小,且無人直升機能以較高的速度前行等優點。但剛性共軸雙旋翼無人直升機的上下旋翼之間、旋翼與機體之間產生的嚴重氣動干擾,與常規構型無人直升機截然不同,剛性共軸雙旋翼轉速快,氣動載荷復雜,旋翼系統產生的振動載荷更大,更需要對旋翼系統進行動平衡調整。本文參考常規構型無人直升機動平衡調整方法,對剛性共軸雙旋翼動平衡調整進行研究。
無人直升機主要通過槳距調節升力和飛行速度,旋翼的旋轉速率是定值,每片槳葉的氣動載荷是一個相位不同、周期相同的周期函數,各槳葉的載荷在槳轂疊加后引起的振動頻率是定值。旋翼動平衡調整目標是,將旋翼系統傳到機身結構上的NΩ交變載荷抵消掉(N為槳葉片數,Ω代表額定旋翼轉速),使無人直升機三個方向的1Ω振動降到設計要求水平。
無人直升機槳葉調整參數與機體振動值是線性映射關系,基于此原理其他研究人員提出基于階次跟蹤、基于GRNN神經網格模型方法、追蹤最優化網格方法,對無人直升機旋翼動平衡進行調整。但這些方法需要已知數據構建數學模型,不適用新型無人直升機研制中的地面聯合試驗。共軸雙旋翼系統的振動大且調平復雜,本文基于剛性共軸雙旋翼無人直升機地面動平衡調整工程實踐,提出一種系統且全面的雙旋翼動平衡調整方法。
旋翼動平衡調整方法
旋翼動平衡調整的核心是通過改變槳葉參數,彌補槳葉加工誤差,使旋翼系統工作狀態重新得到平衡,或通過產生一個與原有振動方向相反、振動值大小相同的振動,以抵消一部分原有的振動。目前主要通過調整槳葉離心力或氣動力來調整。
槳葉離心力調整主要是在槳葉根部增加或減少配重,重新調整槳葉的質量分布,使槳葉質量分布變化引起的振動來抵消原先的振動。
槳葉氣動力調整主要是調節變距拉桿和槳葉后緣調整片,變距拉桿可以改變槳葉的槳距,槳距變化直接影響槳葉的升力,改變槳距對槳葉的氣動載荷影響最大,是旋翼動平衡調整方法中能發揮最大調節作用的方式;改變槳葉氣動力還可以通過調整槳葉后緣片的彎曲來改變槳葉局部氣動特性,改變槳葉氣動力會使旋翼系統的升力函數發生改變,在新型無人直升機研制試驗時,可能導致后續旋翼升力數據的偏差。
剛性共軸雙旋翼由上下旋轉方向相反的兩組旋翼系統組成,兩組旋翼產生的不平衡扭矩可以互相抵消,如采用改變氣動力來調整旋翼系統的動平衡,共軸剛性雙旋翼需要同時改變兩組相對應的槳葉氣動載荷,找出兩組相對應旋翼的工作復雜性,不適用試驗現場。改變槳葉質量分布調整剛性共軸雙旋翼系統的動平衡最合適,本次剛性共軸雙旋翼的動平衡調整選用試重法。試重法可在無任何初始數據條件下,利用矢量相加的方法,對一次初始無配重下振動數據和一次試配重后的振動數據進行分析,得出滿足旋翼動平衡要求的下一次加載重量及加載點。
動平衡檢查
旋翼動平衡測量調整是在額定轉速狀態下進行,為降低動平衡調整對其他系統壽命的影響,加快試驗現場工作進度,有效提出旋翼系統調整的建議,減少動平衡調整開車次數,需要旋翼系統振動響應值數據作為依據,因此需要對旋翼系統的動平衡振動響應進行快速檢查。
動平衡設備
動平衡檢查設備為XZD-5旋翼錐體與動平儀,該型動平衡儀可以測得動平衡的幅值和相位,廣泛應用于各機型地面、空中旋翼系統的動平衡調整。
XZD-5旋翼錐體與動平儀由主機、手持儀、振動傳感器、光電轉速傳感器、線纜和反光紙等組成。
動平衡設備安裝
將振動傳感器安裝在主減速器上,位置靠近旋翼軸,方向為Y方向;光電傳感器安裝在機身上,方向垂直于旋翼面,在光電傳感器正上方的下旋翼黃色基準槳葉下表面,貼上反光紙。光電傳感器是一個旋翼實際轉速采集傳感器,光電傳感器向槳葉的反光紙發送脈沖信號,反光紙每經過一次光電傳感器,光電傳感器將接受一次信號,即可得知旋翼轉速。
動平衡調整步驟
在調試現場,采用試重法可以快速粗略地將旋翼系統的振動響應調至滿足設計要求,該型剛性共軸雙旋翼要求Y方向振動值小于0.2IPS,進行動平衡檢查與計算,可以忽略影響較小的參數,忽略槳葉厚度,將槳葉視為一個無厚度的平面,并做出兩種假設:第一,在同一槳葉上加載配重,改變的動平衡幅值與質量成正比,相位不變;第二、在各槳葉加載相同質量,改變的動平衡振動響應幅值均相同。無人直升機旋翼系統動平衡地面現場調試步驟如下。
第一,測量無配重當前狀態下動平衡幅值和相位,并在預先備好的動平衡調整圖即圖1中繪出該動平衡狀態點;
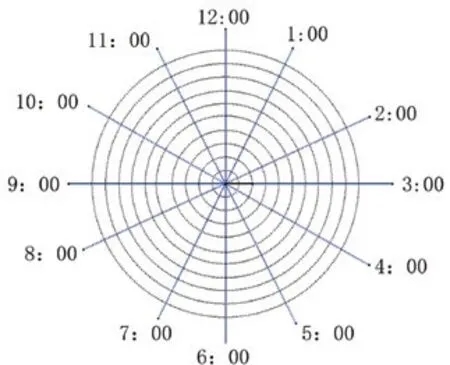
圖1 動平衡調整圖,圖上的數字為時間。
第二,試配重。選擇一個基準槳葉,在槳葉根部加載一個試配重塊,測量動平衡值,并在動平衡圖中繪出其狀態點;
第三,連接兩狀態點,其連線矢量方向即是基準槳葉方向,旋轉槳葉,將其與該矢量方向平行,得到各槳葉與坐標軸的相對位置,繪出各槳葉加載坐標圖,該坐標圖即為初步動平衡圖;
第四,根據平衡振動矢量和坐標軸的相對角度關系,找到合適加載支臂。具體配重質量根據質量與振動幅值的比例關系計算確定,如一次不成功,根據最新數據進一步修正,直到使動平衡向圓心靠近,到達設計要求。
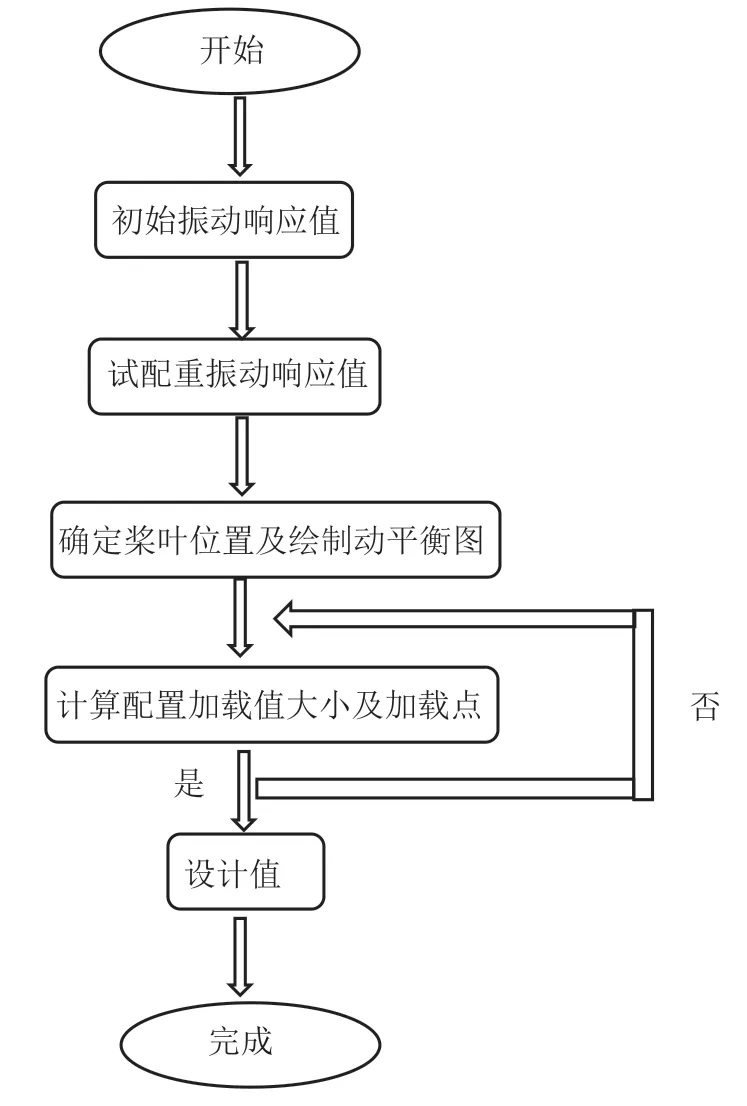
圖2 動平衡調整流程圖。
剛性共軸雙旋翼動平衡調整
本次剛性共軸雙旋翼動平衡調整選擇在剛性共軸雙旋翼無人直升機地面聯合試驗臺上進行,剛性共軸雙旋翼無人直升機旋翼圖,如圖3所示,上下旋翼槳葉標定及旋轉方向如圖4、5。設計任務要求旋翼系統動平衡振動響應值在Y方向上為IPS<0.2。
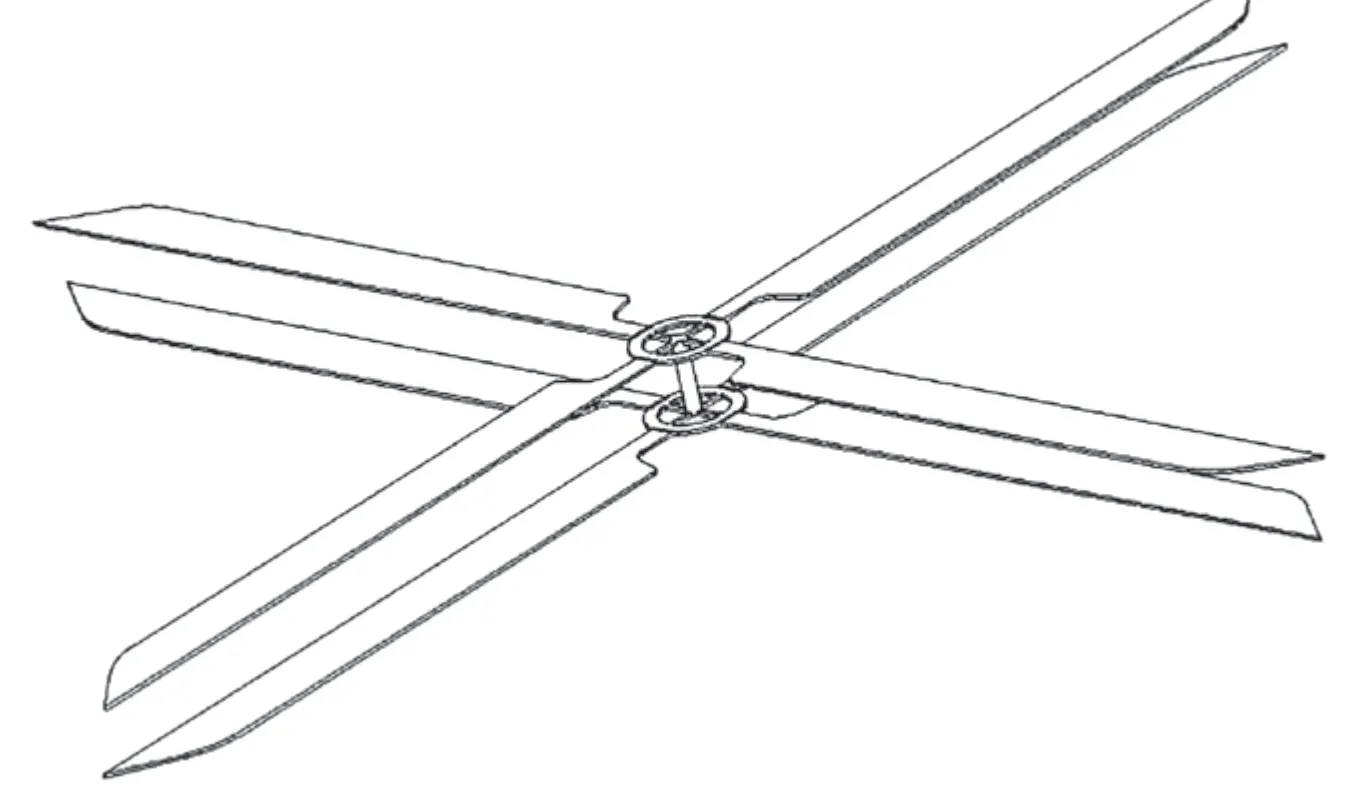
圖3 剛性共軸雙旋翼示意圖。
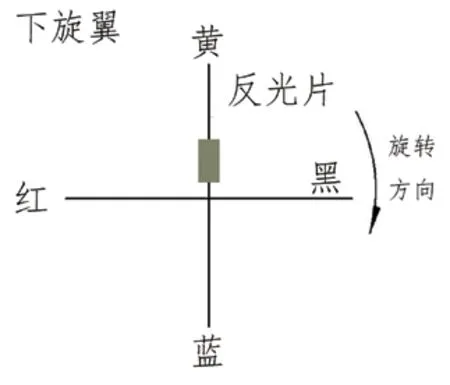
圖4 下旋翼槳葉示意圖。
調整前準備
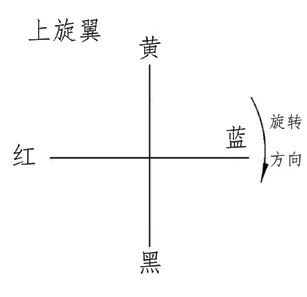
圖5 上旋翼槳葉示意圖。
在槳葉翼跟下方的機身支架上安裝振動傳感器,用于測量旋翼系統1Ω水平方向即Y方向的振動值,該傳感器的安裝位置嚴格垂直于旋翼旋轉平面。在黃色基準槳葉翼跟的下表面安裝反光片,在機身預留傳感器支架上安裝帶支座的光電傳感器,光電傳感器射出的光束指向反光片,振動傳感器和光電傳感器通過數據線與遠處的動平衡分析儀相連接,以上裝置可測量出旋翼轉速及該轉速下的動平衡振動值及相位。調整前需要對光電傳感器和動平衡分析儀進行校準與狀態確認。
動平衡調整
動平衡調整開始,旋翼系統首次地面開車檢查,初始動平衡振幅為0.3IPS@9:00,即為動平衡圖上的A點,不滿足動平衡振動幅值小于0.2IPS的設計要求。剛性共軸雙旋翼無人機直升機的最大振動源來自上旋翼振動,為減少動平衡調整影響參數,本次動平衡調整只在上旋翼加配重。選擇在上旋翼黃色槳葉試加321.9g配重,開車后檢查結果為0.75IPS@8:08,見圖6中的B點方向代表黃色槳葉加載方向,將旋翼系統順時針旋轉,黃色槳葉與平行,動平衡圖中旋轉后的槳葉t與坐標軸相對位置如圖6所示。|AB|線段長度代表試重后振動變化的幅值,約為35.83mm,對應質量為321.9g。由動平衡圖的結果分析可知,如果要實現旋翼系統振動值小于0.2IPS的動平衡調整目標,需要將黃槳試配重去掉,再根據前兩次動平衡結果計算出配重加載重量及加載點。如圖6所示,
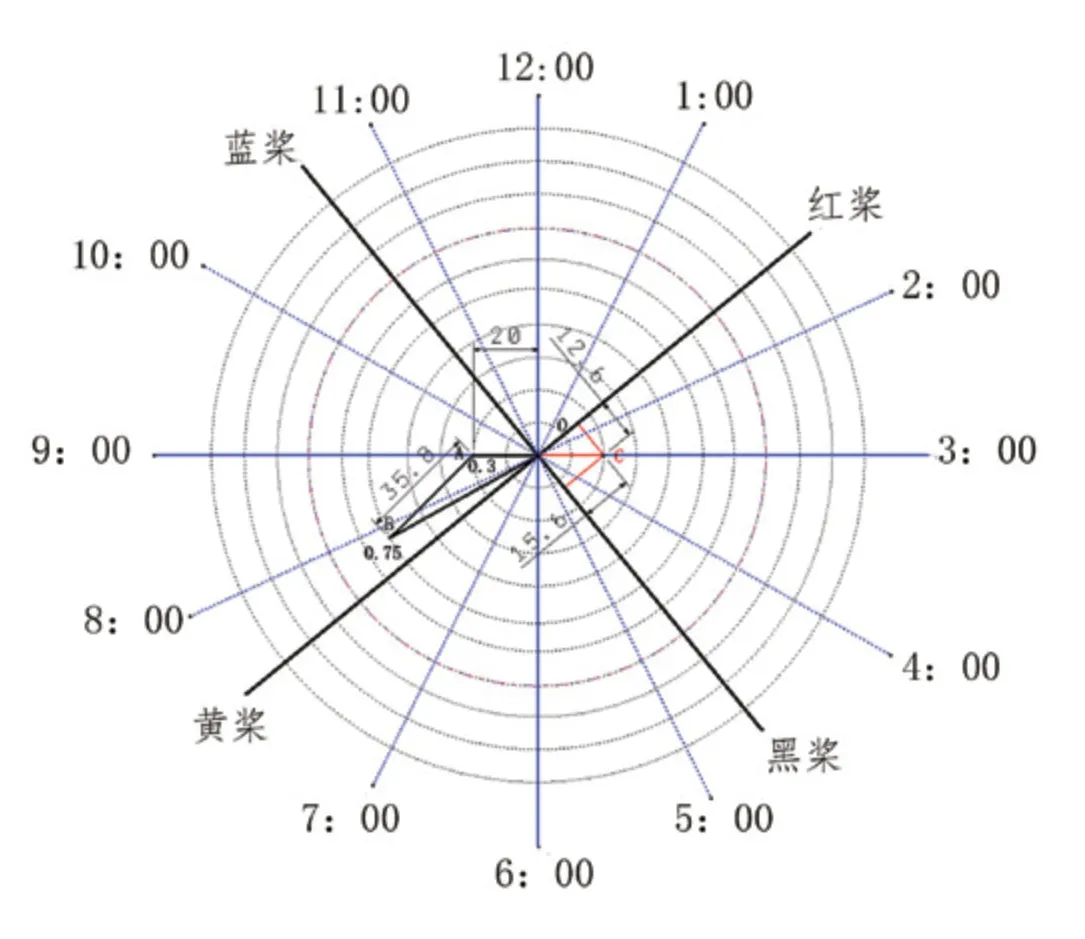
圖6 動平衡調整結果圖。
計算得出,
要想將動平衡點落在O點,需要在上旋翼紅槳上加載113.3g,黑槳上加載140.3g,在無人直升機旋翼系統動平衡調整時,盡量只在一片槳葉上增加配重或在兩片槳葉上增加相同重量的配重,便于在調整現場快速利用動平衡圖簡單計算出配重與振動數值變化的對應關系,并方便判斷矢量圖的方向,受限于調整現場單個配重片質量,因此在紅槳及黑槳各加152.3g的配重。加載后,實測動平衡值為0.05IPS@11:56,滿足振動值小于0.2IPS的設計要求,剛性共軸雙旋翼無人直升機動平衡調整完成。
總結
剛性共軸雙旋翼無人直升機氣動載荷復雜,振動響應大,其動平衡調整是一項十分重要的工作。本文參考常規構型動平衡調整方法,對剛性共軸雙旋翼無人直升機動平衡調整進行探索研究,根據雙旋翼氣動特性,簡化雙旋翼配重加載方式,調整結果滿足設計要求。
調整結果顯示,剛性共軸雙旋翼無人直升機的動平衡調整原理與常規構型類似,采用試重法,通過現場簡單工具計算,在極少的開車次數下即可將動平衡振動響應值調整至設計要求,具有準確性、快速性及良好的通用性。
該方法可以適用于其他相似構型的無人直升機動平衡調整。雖剛性共軸雙旋翼無人直升機動平衡調整影響因素眾多,但只需對影響最大的參數進行調整,即可滿足動平衡設計要求。動平衡調整原理簡單,但計算復雜,如果將其數學模型簡化,內置于動平衡分析儀中,可以利用動平衡分析儀存儲數據,自動計算下一次動平衡試驗所需加載配重重量值及加載點,簡化動平衡調整對工作人員的要求,降低用戶維護難度,應用于無人直升機大規模應用場景的維護。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
