“動中通”系統配置技術分析
2021-11-13 08:40:18謝婷婷
新一代信息技術 2021年17期
謝婷婷,吳 瓊
(1. 中國人民解放軍66736部隊,北京 100144;2. 北京博大經開建設有限公司,北京 100176)
0 引言
在“動中通”技術的應用中,我國的衛星通信技術實現了進一步的發展和創新。相比較傳統的“靜中通”技術而言,“動中通”技術有著明顯的不同,其應用優勢也更加顯著。因此,在衛星通信領域的發展中,技術人員一定要加強“動中通”技術的應用研究,并通過科學合理的技術措施來做好其系統配置,以此來發揮出其技術優勢,促進衛星通信技術的革新。
1 “動中通”技術概述
“動中通”是將衛星通信技術和之前的“靜中通”技術作為基礎發展而來的一種新型衛星通信技術,通過該技術的應用,可以讓移動衛星和地面之間建立起有效的通信。隨著“動中通”技術在當今時代的發展,不僅讓傳統“靜中通”技術的應用弊端得以有效解決,同時也在衛星和地面站之間建立起了連續性的信號傳輸,讓這兩者之間達到了實時通信的效果。將“動中通”技術合理應用到衛星通信系統中,將會為軍事行動以及賑災搶險等的各項行動提供良好的通信保障,讓“動中通”形式的衛星通信技術在當今的信息化時代中發揮出強大的應用價值[1]。
相比較傳統的“靜中通”技術而言,“動中通”技術形式的衛星通信系統有著基本相同的拓撲結構,但是這兩者在很多方面也表現出了很大程度的不同之處,具體情況如表1所示。
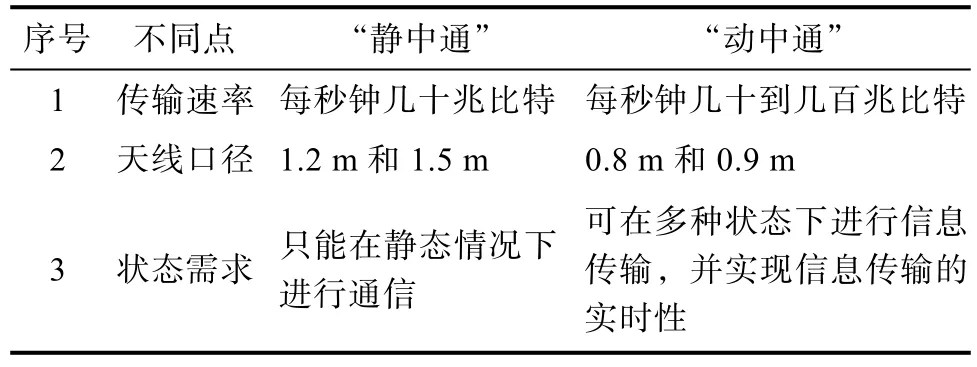
表1 不同點比較分析Tab.1 comparison and analysis of differences
2 “動中通”技術原理分析
“動中通”技術在具體的應用中,其關鍵的技術原理是移動形式通信效果的實現,同時為衛星移動狀態下的通信穩定性提供有效保障。傳統的衛星通信技術應用中,經常會出現信號傳輸不穩定甚至是傳輸偏移等的情況,進而對衛星通信系統的應用效果和相關領域的發展帶來一定程度的阻礙。所以,伴隨著當今科學技術的發展,“動中通”技術便可有效彌補這些不足,不僅讓衛星通信過程中的信號變得更加穩定,也進一步提升了衛星通信的信號質量,讓現代的衛星通信方面服務需求得到了很大程度的滿足。
借助于“動中通”技術中的自動化跟蹤系統,可以將衛星移動式位置變化作為基礎,迅速、及時地對其位置偏移方向及其大小進行準確計算,讓天線角度可與衛星實時的運行位置做到有效對應,以此來實現衛星信號的實施跟蹤監測。通過這樣的方式,就可以讓衛星和地面站之間的信息傳輸更具穩定性和可靠性。就“動中通”系統的技術而言,其主要的組成部分有以下兩個:
2.1 自動化天線跟蹤系統
在“動中通”技術的具體應用過程中,自動化天線跟蹤系統屬于一項核心技術,其主要的組成部分有三個,其一是慣導系統;其二是數字平臺,其三是伺服系統[2]。具體應用中,首先借助于陀螺儀對衛星的角度變化進行測量,然后借助于慣導系統對載體具體的姿態、位置變化以及速度變化等的這些指標值進行科學有效的計算。
2.2 衛星常規通信系統
“動中通”這一技術的應用原本就是將衛星常規通信系統作為基礎,借助于自動化天線跟蹤系統來實現“動中通”技術和衛星通信技術之間的嵌入式融合。通過這樣的方式,才讓這一系統的信號導入更加精準,以此來實現系統管理、運行狀態監測、系統監控等各項管理措施的有效實施。通過這樣的方式,便可為衛星通信系統實際通信需求的全面滿足提供保障。
3 “動中通”衛星通信系統的應用實例分析
為實現“動中通”系統配置技術的深入研究,使其在衛星通信系統中得以充分利用,本次以船載“動中通”系統為例,對其配置技術進行分析。
3.1 系統組成分析
在船載形式的“動中通”系統中,主要的組成部分包括天線控制器、衛星天線、信道加密設備、衛星調制和解調器以及業務終端。其中,天線控制器的主要功能是對天線具體的轉動情況加以控制;衛星天線的主要功能是對射頻電磁信號進行發送和接收;信道加密設備的主要功能是對通信傳輸進行加密處理,以此來保障數據安全;衛星調制和解調器的主要功能是對基帶信號進行調制,并對中頻電磁信號進行解調;業務終端的主要功能是為用戶提供其所需的服務,其主要組成部分有計算機、音頻設備以及視頻設備等[3]。
3.2 基本工作原理分析
在本次所研究的船載形式“動中通”系統和一般形式的衛星通信系統工作原理十分接近,都是將地球同步衛星用作中繼站來實現船舶和陸地戰或者是船舶和船舶之間的通信。圖1為船載“動中通”系統的工作流程示意圖。

圖1 工作流程示意圖Fig.1 work flow diagram
具體應用中,首先通過編碼和解碼器來進行系帶限號的編碼,然后借助于保密設備對數據進行加密處理,并將加密之后的數據傳送到調制和解調器內,將其調制成中頻信號,再借助于上變頻器對這個調制信號進行提升,使其成為射頻信號,通過功率放大器對這個射頻信號做放大處理,最后借助于天線將其發送出去[4]。信號的接收可以看做是信號發送的一個逆向過程,首先是借助于天線對來自于衛星的下行高頻信號進行接收,然后對其進行放大和變頻處理,再將處理后的信號傳送到解調器內進行解調處理,接下來對其進行解密處理;在信號解密之后,應借助于編碼器對其進行解碼,這樣便實現了所需基帶信號的成功獲取。
3.3 自動化天線跟蹤技術的應用
在船舶運動的過程中,天線指向也會隨之不斷變化,此時,就需要借助于天線伺服系統來及時做出反應,讓天線角度根據衛星位置做出實時調整,使其始終對準衛星,這便是自動化的天線跟蹤系統。就目前的自動化跟蹤方式來看,主要有慣導+GPS形式的跟蹤、單脈沖跟蹤、步進跟蹤以及圓錐掃描跟蹤。以下是這四種跟蹤技術的具體分析:
3.4 慣導+GPS形式的跟蹤技術
這種跟蹤技術屬于開環控制技術中的一種,具體跟蹤過程中,并不需要反饋衛星信號,僅僅借助與慣導以及GPS設備對船體進行方向、橫滾姿態、俯仰姿態和經緯信息等的測量,并將已知的衛星位置作為依據,對船體運動中的具體天線指向進行計算獲取。此類跟蹤技術的主要優勢是能夠實現衛星的快速初始捕獲,且在天線被遮擋住的一瞬間也可以和衛星對準,并在清除遮擋的第一時間和衛星之間建立起通信鏈路。但是這種跟蹤方式對于管道設備以及GPS設備具有完全的依賴性,設備精度即是跟蹤精度,一旦設備出現故障,整個系統都將會失效,因此其跟蹤的精準性和可靠性都存在不足。
3.5 單脈沖跟蹤技術
此技術主要是借助于天線在單個脈沖上進行偏差信號接收,并通過計算來實現天線角度誤差信息的準確獲取,然后根據這個信息來不斷進行天線偏差方向的調整,一直到偏差信號調整為零為止。這種跟蹤技術又叫做零值跟蹤技術,該技術有著非常好的實時性和非常高的精準度[5]。但是其設備設計十分復雜,應用成本也比較高,所以該技術在當今依然并未得到廣泛的應用和普及。
3.6 步進跟蹤技術
這種跟蹤技術又被叫做極值跟蹤技術。在該技術的具體應用中,主要是借助于不斷的判斷、搜索以及調整等的這些動作來找尋可以到達場強的信號最大值,以此來實現天線和衛星之間的有效對準。這種跟蹤技術有著比較簡單的設備,應用成本也比較低,在當今的“動中通”衛星通信系統中已經得到了非常廣泛的應用。但是因為這種跟蹤技術需要借助于很多個跟蹤步驟才能實現信號最大值的獲取,所以跟蹤速度非常慢,在實時運動的載體跟蹤中并不是十分適用。
3.7 圓錐掃描跟蹤技術
此種跟蹤技術的主要應用原理是饋源圍繞著天線的中心軸進行圓周運動,在此過程中,天線波束的旋轉呈現出圓錐的形狀。在天線和衛星對準時,通過該技術所接收到的信號電平將是一個恒定值;如果天線并未和衛星對準,則接收到的調制信號將會和波束自身的旋轉頻率相一致,此時就需要借助于解調的方式對其無差角進行計算,并根據具體的計算結果來適當調節天線指向。這種跟蹤技術十分簡單,跟蹤效率非常高,應用成本也比較低廉,但是因為饋源一直都在與天線偏離的拋物面上焦點處做圓周運動,所以天線增益將會在其影響下有所下降。
就目前的“動中通”自動化跟蹤技術來看,以上四種是主要的技術形式,具體應用中,需要根據實際情況來合理選擇,這樣才可以發揮出技術優勢,實現天線和衛星之間的有效對準,保障信息傳輸效果。
4 結論
綜上所述,衛星通信技術在當今的很多領域中都已經成為了一項主流技術,其技術優勢也在國家和社會的諸多領域中得以充分發揮。而在衛星通信技術的具體應用中,為有效避免“靜中通”技術應用的局限性,在提升傳輸速率的同時達到動態化的實時跟蹤效果,技術人員就需要加強“動中通”技術的應用研究。通過“動中通”技術和衛星通信技術之間的有機結合,實現“動中通”形式衛星通信系統的建立,并將其配置技術加以合理應用,這樣才可以有效滿足衛星通信的實際需求,促進衛星通信技術的良好發展。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25