基于EtherCAT 的安全帶卷收力測試系統研究
2021-11-15 03:58:22張振巖胡世廣白如玉
科技與創新 2021年21期
關鍵詞:系統
張振巖,胡世廣,白如玉
(中汽研汽車工業工程(天津)有限公司,天津 300300)
安全帶是汽車安全行駛對駕駛人和乘客保護的重要部分,GB 14166—2013 對卷收器卷收力的測試參數和方法作出具體要求及說明。基于PCI 板卡和工控機的卷收力測試系統,在環境濕度較大或者長期不使用時,容易出現板卡接觸不良導致無法識別甚至無法開機情形,很大程度上影響用戶使用體驗滿意度。基于EtherCAT 總線的控制方式通過以太網連接,受濕度等環境因素影響較小,避免了PCI 接觸不良等問題的發生。此外,EtherCAT 技術具有系統配置簡單、拓撲結構靈活、傳輸速率高效、實時性高且低成本的優勢,同時其分布式時鐘機制可以同步所有支持該機制的從站時鐘,使得從站節點之間時鐘抖動遠小于1 μs。本文系統下位機基于EtherCAT 技術進行運動控制,通過Modbus TCP 與上位機進行采集數據、控制指令和測試參數的通信,實現卷收力測試的高精度穩定控制,滿足安全帶卷收力相關試驗測試需求。
1 控制系統
系統控制對象是一套電動伺服牽引裝置,包含伺服電機、電缸和載荷傳感器。系統選用研華工控機為上位機,Leetro I5 運動控制器及模塊為下位機,松下A6B 伺服電機為驅動單元,FESTO 電缸為執行機構,Vishay 載荷傳感器和伺服電機編碼器為測量單元,各控制單元之間通過以太網網線連接,其硬件結構如圖1 所示。
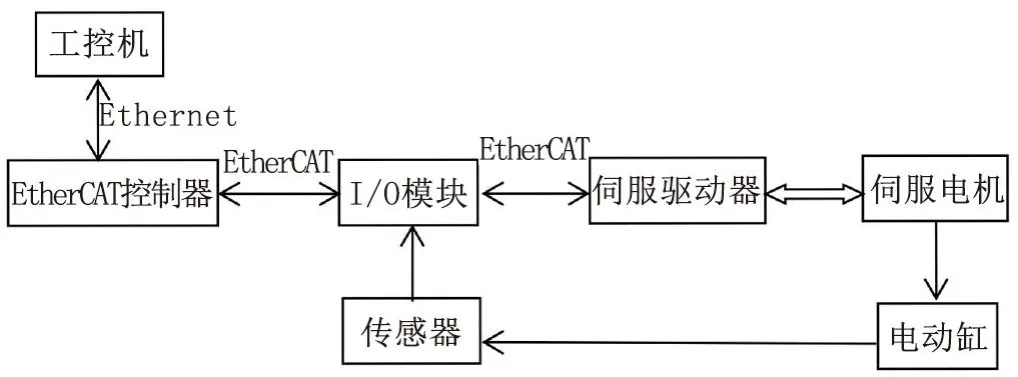
圖1 硬件系統結構圖
工控機與EtherCAT 控制器之間以Modbus TCP 協議進行通信,內容包括各傳感器測量值、按鈕信號、開關信號、控制及試驗參數指令。EtherCAT 控制器、I/O 模塊、伺服驅動器之間以EtherCAT 協議進行過程數據的通信,EtherCAT控制器為主站,I/O 模塊和伺服驅動器為從站。在一個通信周期中,主站發送數據幀,從站在數據幀經過時讀取相關報文中的輸出數據,同時從站的輸入數據插入到同一數據幀的相關報文中。當該數據幀經過所有從站并完成數據交換后,由EtherCAT 系統的末端從站將數據幀返回。整個過程中,報文只有幾納秒的時間延遲。
2 系統控制流程
2.1 實時系統控制流程
實時系統創建兩個優先級任務,優先級1 是卷收力自動測試,循環周期為2 ms,監視時間為2 ms;優先級2 是手動調試程序,循環周期為10 ms,監視時間為5 ms。實時系統根據上位機的控制指令執行相應任務,其中自動測試程序流程如圖2 所示。
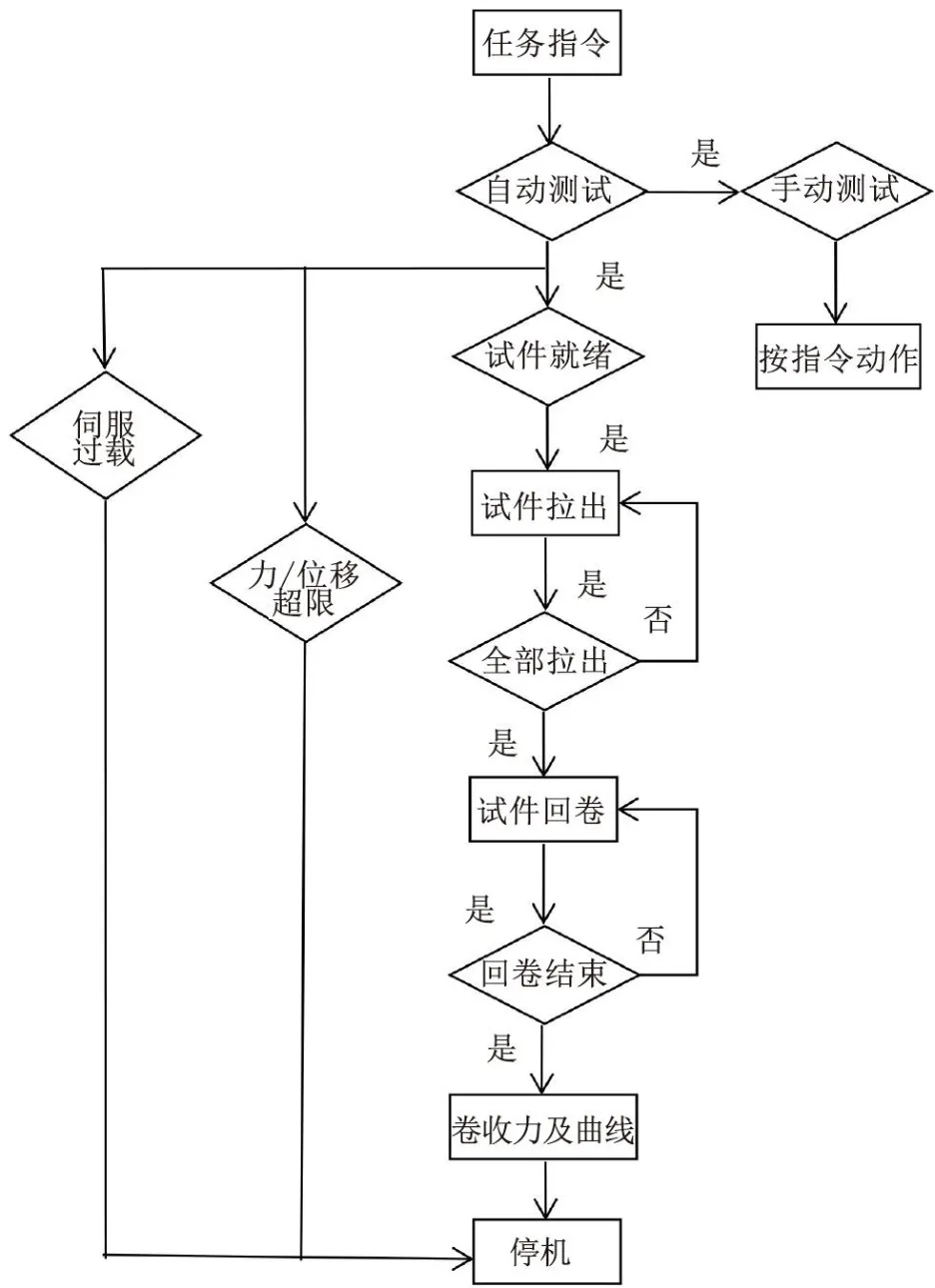
圖2 自動測試流程圖
當收到上位機自動測試指令時,實時系統執行自動測試任務程序。首先通過載荷傳感器反饋判斷安全帶試件安裝情況,若未就緒則停止動作并進行提示,就緒狀態下系統按照設定速度將安全帶全部拉出,待全部拉出后電機開始反轉將安全帶卷回,到達設定卷回長度時停止動作,顯示設定特征點卷收力數值和整個過程載荷-位移曲線,完成整個試驗過程。
整個測試過程中系統實時采集載荷和位移反饋,進行伺服電機報警、載荷和位移超限狀態的監測,一旦出現異常系統立即自動停機并報警提示。
2.2 人機系統交互流程
上位機選用研華610H 工控機,人機交互系統功能主要包括系統標定、手動調試、試驗和數據庫,其功能簡要流程如圖3 所示。
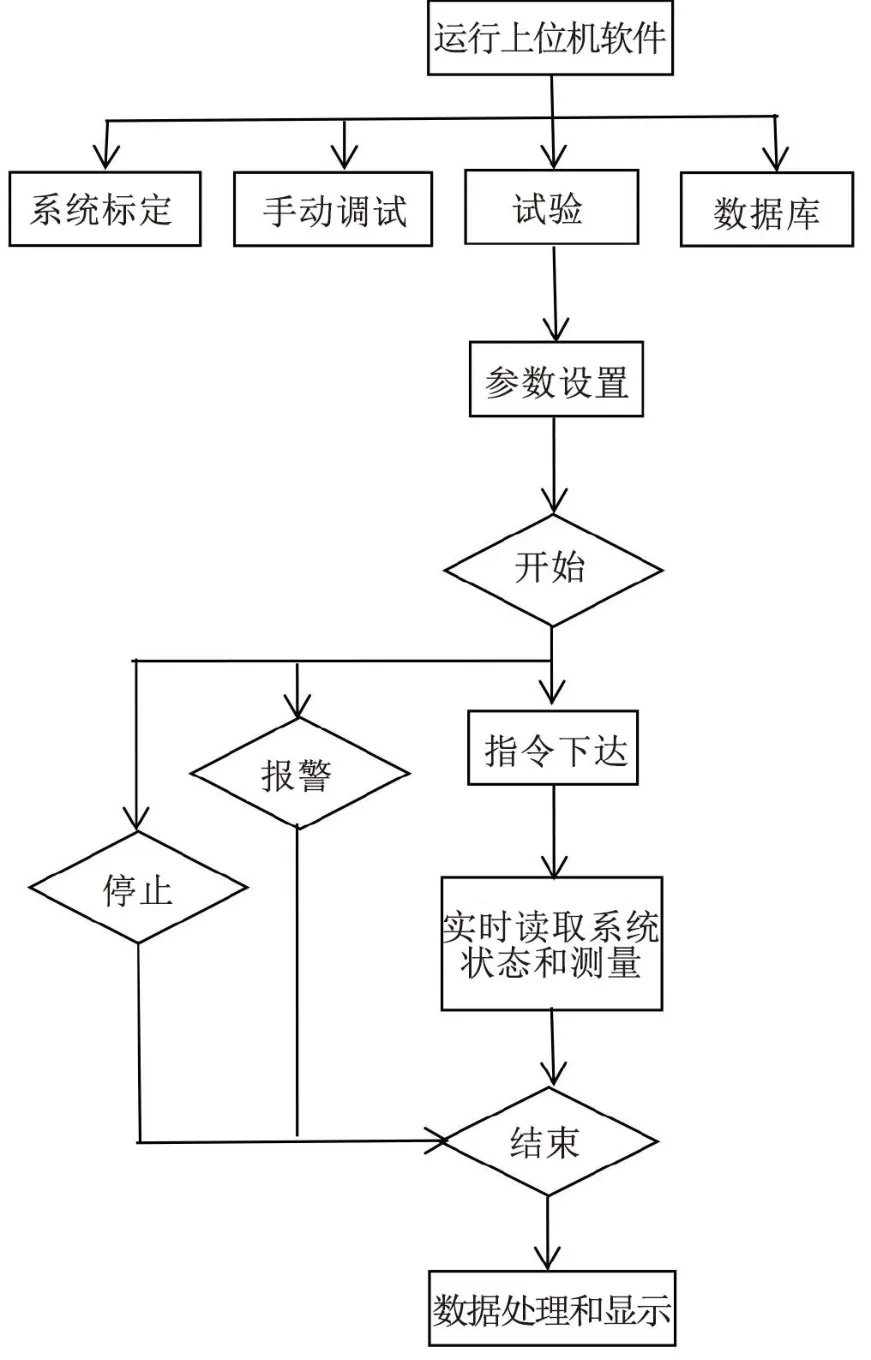
圖3 人機交互系統流程圖
系統標定包括傳感器標定和通道設定。傳感器標定用于進行工程值和電壓值間的線性插值,以保證系統測試精度。通道設定用于設置模擬量輸入傳感器、電缸行程開關等開關量輸入信號、電磁閥等開關量輸出信號對應于模塊的接口。
手動調試用于對系統單元逐一測試和調整,包括傳感器反饋、開關、電磁閥等單元的測試,電動伺服加載機構的位置調整和閉環控制性能測試。
試驗部分用于對安全帶卷收力的自動測試。測試啟動前需要進行參數設置,包括安全帶總長度、特征點位置等產品特征參數,拉出速度、回卷速度、回卷長度等動作參數,載荷位移上下限等報警參數,曲線每秒繪制點數、濾波頻率等數據處理參數。在試驗界面點擊“開始”,設定參數下載到EtherCAT 控制器相應共享寄存器,實時系統自動完成整個測試過程,上位機實時讀取載荷和位移反饋并進行濾波處理、數據及曲線顯示。當需要時按下“停止”按鈕系統停止動作,當出現超載、超位移或者伺服報警等異常情況時系統自動停止工作,并在人機交互界面報警顯示。
數據庫用于測試結果數據的存儲和查詢。在每次測試結束后,點擊試驗界面“保存數據”,測試相關設置參數、測試結果及曲線都存入數據庫。進入數據庫界面,默認顯示最近一次測試的信息,也可根據試驗日期、試驗人員、產品型號等進行歷史記錄查詢。在曲線瀏覽部分可進行特征點查詢,根據拉出位移或者回卷位移設定特征點,數據庫自動計算并顯示該特征點的回卷力和拉出力。
3 系統性能測試
根據本文提出的基于EtherCAT 實時以太網的伺服運動控制系統,我們搭建了卷收力測試臺架,針對某型號安全帶卷收力進行測試,安全帶總長1 850 mm,特征點位置為20%,回卷長度50%,回卷速度8.3 mm/s,拉出到位載荷為15 N,拉出速度為10 mm/s,曲線每秒繪制點數50,低通濾波頻率100,卷收力合格上限值為6.8 N。測試完成后試驗界面如圖4 所示,特征點位置卷收力為7.20 N,結果不合格。
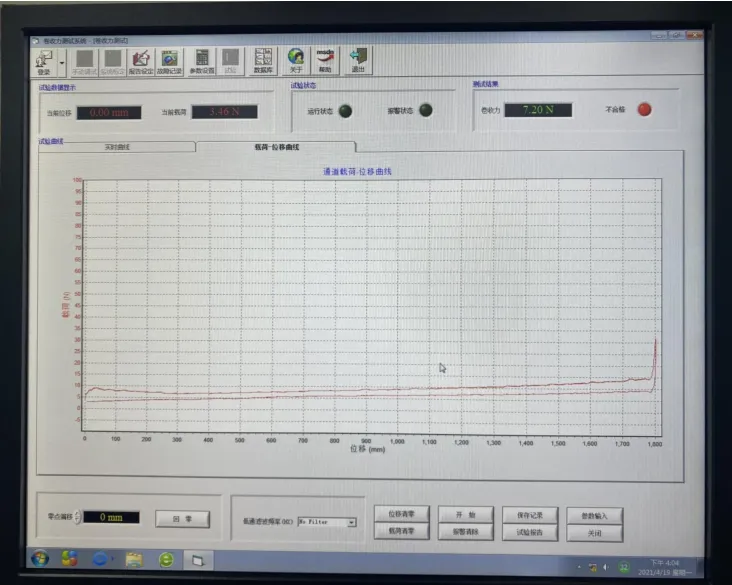
圖4 人機交互系統流程圖
4 結論
本文基于超高速實時以太網EtherCAT 技術設計安全帶卷收力測試系統,滿足安全帶卷收力測試的使用需求。系統軟硬件集成度高、接線簡單,減少系統裝配工作量。系統協議開放性好、通信性能好,為改善控制算法性能提供條件。系統測量精度達到0.01 N、穩定性好,解決了現有設備存在的問題,受到用戶的一致好評。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32