基于SMA絲驅動的仿生捕蠅草設計與實驗研究
2021-11-16 01:45:50王揚威
微特電機 2021年10期
李 健,閆 杰,王 敏,王揚威
(東北林業大學 機電工程學院,哈爾濱 150040)
0 引 言
我國林業資源有限,作為重點的保護對象,病蟲害防治占據著極其重要的地位。隨著社會的發展,對林業資源的保護方法也隨著技術的進步而不斷深入。在林業保護中,每年因病蟲害威脅帶來的經濟損失高達150億元,因此研究有效的病蟲害防治方法和監管手段變得尤為重要[1]。目前主要通過化學方法、生物方法及物理方法來對病蟲害進行防治。化學方法是通過施藥對森林樹木進行治理,治療效果快速有效,但是會對森林的生態環境造成損傷;生物方法是通過引進害蟲天敵進行防治,利用生物鏈之間的關系進行防治,但在使用時存在造成生物鏈失衡的風險;物理方法是通過“聲、光、電、熱”等物理手段對害蟲進行誘殺,該方法是綠色防控技術,效果快速顯著,得到了廣泛應用。上述三種法病蟲害防治方法和監管手段均受制于某些因素無法達到現階段對于病蟲害防治的相關目標與要求。因此研制自動捕蟲裝置,輔以信息素等技術,實現對于特定樹木上的特定害蟲,尤其是運動能力強的害蟲的活體捕捉,對于蟲情監測與防控研究具有重要意義。
形狀記憶合金(以下簡稱SMA),是一種在加熱升溫后能完全消除其在較低溫度下發生的變形、恢復其變形前原始形狀的合金材料,即具有“記憶”效應的合金[2]。SMA的另外一種重要性質是偽彈性,又稱為超彈性,表現為:在外力作用下,SMA具有比一般金屬大得多的變形恢復能力,即在加載過程中產生的大應變會隨著卸載而恢復。SMA絲集傳感與驅動于一身,因而得到了廣泛的研究及應用,其特點是結構簡單、能夠輸出直線運動、功重比高[3]。
生物體經過上億年的進化,具備了各具特色的運動能力和環境適應能力,某些生物具備的功能比迄今為止任何人工制造的機械都優越得多[4]。因此,越來越多的研究人員把研究目標轉向生物界,希望可以通過對生物界某些具備特定功能的生物的研究,為生產生活作出指導。捕蠅草的葉片感觸運動可以捕捉移動甚至飛翔的昆蟲,恰好適合作為本文的仿生對象。
本文通過分析捕蠅草的動作特點,制定仿生目標,選擇SMA絲作為驅動材料,研制基于SMA絲的仿生捕蠅草,設計制作仿生捕蠅草葉片,對仿生捕蠅草葉片進行理論建模與分析,并進行了性能實驗和功能實驗。
1 仿生捕蠅草葉片的設計與制作
1.1 捕蠅草的運動機理及運動學分析
有許多植物以蟲子為食,例如捕蠅草。植物捕捉昆蟲主要有引誘昆蟲、捕捉昆蟲、分解與吸收、維持自身生長4個步驟[5]。捕蠅草的捕捉過程極為復雜,對稱的葉片通過葉柄相連接,其引誘蟲子主要依靠葉片邊緣的蜜腺所分泌的蜜汁[6]。昆蟲被蜜汁吸引落在葉片上,當昆蟲在一定時間內兩次觸碰位于捕蟲夾內的觸發絨毛時,葉片會迅速閉合(圖1左)[7]。葉片邊緣有規則狀的刺毛,在葉片閉合時,刺毛正好交錯排布,形成一個籠子,使昆蟲無法逃出。且在刺毛的終端存在分泌粘液的系統,可以黏住昆蟲,防止昆蟲逃脫(圖1右)。隨后昆蟲會被消化吸收,吸收的養分用來維持捕蠅草的自身生長[8]。
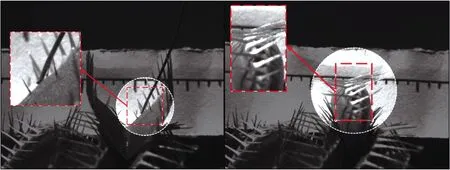
圖1 觸發絨毛(左)和刺毛(右)
捕蠅草的動作機制:捕蠅草葉片初始狀態為向外側彎曲,當內側觸發絨毛感受到機械刺激后,電信號會引起組織內離子的定向運動,形成化學勢差,并引起水的流動,在水壓的作用下細胞壁的緩慢變形,并存儲了彈性勢能,葉片的曲率逐漸變平[9];當水壓到達一個臨界閾值時,在幾何約束的作用下,本體彈性勢能突然釋放并轉換成動能,葉片快速屈曲,實現曲率從凸到凹的變化,引起的被動流可以提供粘性阻力以平衡彈性,持續的壓力供給使得葉片保持在向內彎曲的狀態[10]。
捕蠅草葉片的動作機制涉及植物生理學、化學、機械結構學、流體力學等諸多學科,本文主要從機械及力學的角度研究其宏觀層面的運動學特性,并對其運動方式進行仿生化研究,在快速抓取及控制方面進行實驗研究。
通常情況下捕蠅草的整個運動過程大概可以分為初始階段、捕捉階段、消化階段3個階段[11]。在初始階段,捕蠅草的兩個葉片呈張開狀態,且對稱分布,葉片的張開角度為58.2°,葉片頂間距為7.7 mm;在捕捉階段,捕蠅草在一定時間間隔內受到兩次刺激時,葉片迅速閉合,完成捕捉動作。捕蠅草能夠在4~6 s內完成葉片的閉合(野生捕蠅草時間會更短,最快可在0.5 s內完成捕捉動作),刺毛相互交錯,防治獵物逃脫,此時捕蠅草葉片并未完全閉合,而是進入消化階段。在消化階段,捕蠅草葉片緩慢閉合,直至獵物消化吸收完畢。
圖2、圖3分別為捕蠅草初始階段和捕捉階段的圖象。
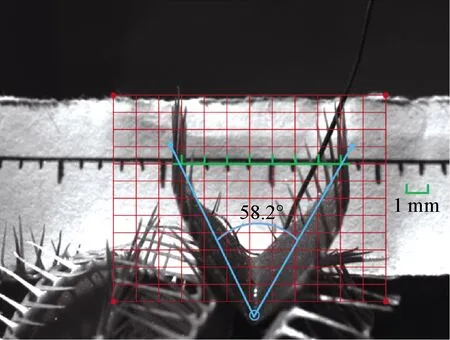
圖2 捕蠅草初始狀態
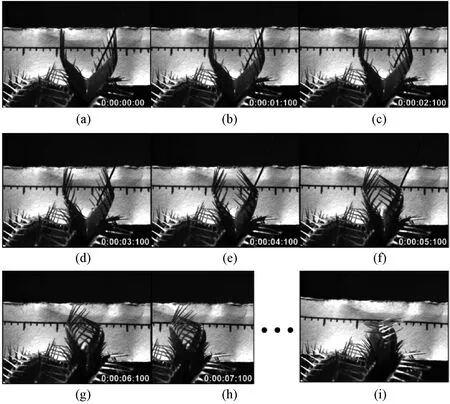
圖3 捕蠅草捕捉過程
量化分析捕蠅草運動過程的各個階段,我們得到捕蠅草在整個運動過程中葉片頂間距、角度及時間的數據,如表1所示。

表1 捕蠅草葉片頂間距與時間
圖4為捕蠅草葉片頂間距與距離變化速率隨時間變化曲線。通過對測得的數據進行分析,我們發現捕蠅草葉片可以在4~5 s內完成葉片的合攏動作,頂間距呈現遞減趨勢,變化速率呈現出拋物線趨勢。在0~4 s時間內,捕蠅草的頂間距逐漸減小,變化速率呈現遞增趨勢;在第4 s時,捕蠅草的頂間距變化速率達到峰值,為1.53 mm/s;在4~7 s時,捕蠅草的頂間距變化速率呈現遞減趨勢,且逐漸進入平緩階段,此時頂間距為3.67 mm,捕蠅草刺毛相互交錯,捕捉階段結束,進入消化階段。直至消化階段結束,捕蠅草葉片的頂間距,趨近于0。
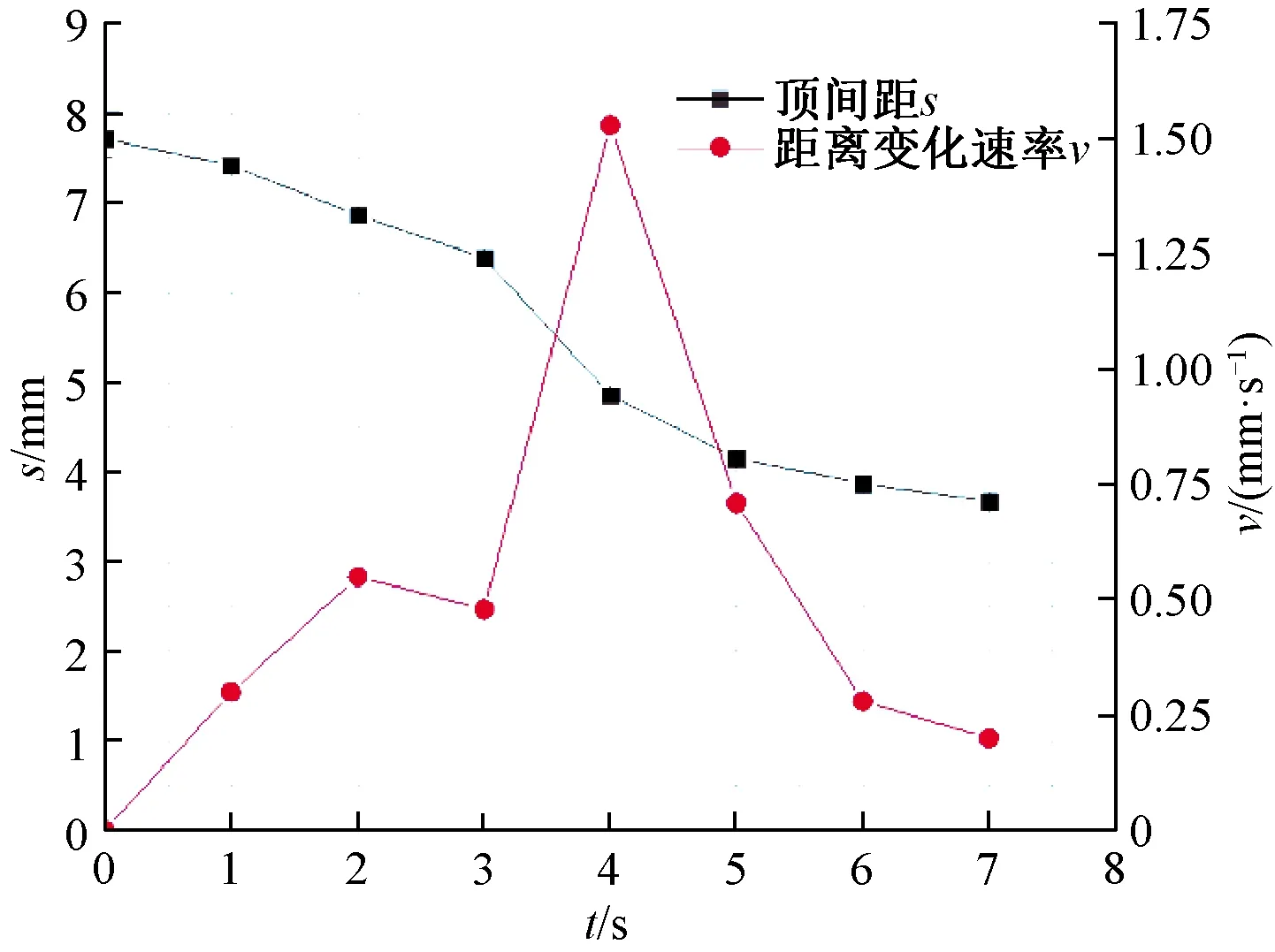
圖4 頂間距、距離變化速率與時間的關系曲線
圖5為捕蠅草葉片張開角度及角度變化速率與時間的關系曲線。通過對測得的數據進行分析,我們發現捕蠅草在初始階段的葉片張開角度為58.2°,在捕捉階段,葉片的張開角度逐漸減小,當減小至27°左右時,葉片的角度變化趨于平緩。捕蠅草葉片的角度變化速率呈現拋物線趨勢,在0~4 s時,捕蠅草葉片的角度逐漸減小,角度變化速率逐漸增加。在4 s時達到峰值,此時捕蠅草葉片的角度為36.6°,角度變化速率為11.5 rad/s。在4 s以后,捕蠅草葉片角度持續減小,角度變化速率逐漸減小,捕捉階段結束后,捕蠅草的角度變化速率趨于平緩,角度逐漸減小,進入消化階段。
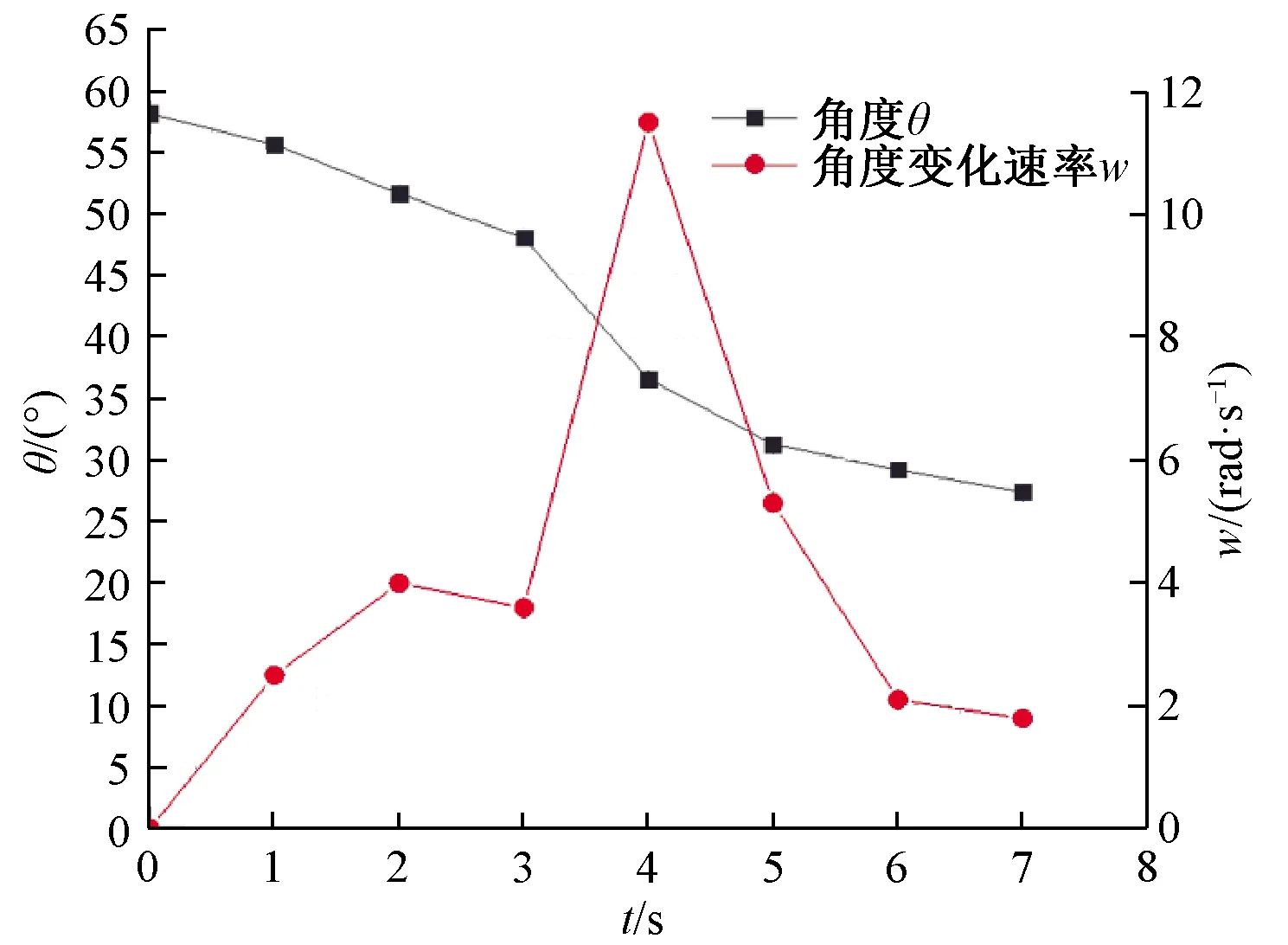
圖5 角度與角度變化速率與時間的關系曲線
綜合上述分析,捕蠅草在捕捉階段,葉片的頂間距和角度逐漸減小,相應的變化速率呈現拋物線趨勢,且均在4 s達到變化峰值,而后變化速率逐漸趨于平緩,在7 s進入消化階段。在消化階段,捕蠅草的頂間距和角度逐漸減小,直至頂間距和角度變化至零,此時捕蠅草葉片會繼續保持一段時間(圖3(i)),直至獵物消化完畢,才會張開葉片,進入下一次捕捉階段。
1.2 仿生捕蠅草的仿生目標與設計要求
1.2.1 仿生目標
本文的設計與實驗目標是運用仿生學知識,根據捕蠅草運動過程中的運動特點和捕蠅草葉片的結構特點,設計并制作一種仿生葉片。綜合考慮仿生捕蠅草在捕捉獵物時的運動特性,設計了一種仿生捕蠅草,提出了以新型智能材料SMA絲作為驅動、以硅膠作為本體的新型仿生捕蠅草的設計、制作、控制方案。仿生捕蠅草葉片需要在特定環境要求下實現彎曲動作,完成捕捉任務。
1.2.2 設計要求
利用SMA絲作為驅動材料設計仿生捕蠅草,考慮到空間的特殊環境以及目標的非合作性,仿生捕蠅草需要滿足以下設計要求:
1)質量輕,結構簡單;
2)最大張開角度應不低于58°;
3)捕捉動作迅速,響應時間快;
4)對抓捕目標具有一定的適應性。
1.3 仿生捕蠅草葉片的結構設計與制作方法
根據設計結構的構思,運用繪圖軟件對捕蠅草葉片結構三維模型進行初步設計。捕蠅草葉片結構主要由SMA 絲、捕蠅草葉片本體、上下夾板及相應連接元件組成,如圖6所示。捕蠅草的葉片采用超彈性材料硅膠通過模具澆注制作而成,且葉片內鋪有SMA絲。SMA絲在仿生捕蠅草本體內部形成回路,通過上下夾板固定于硅膠兩端。
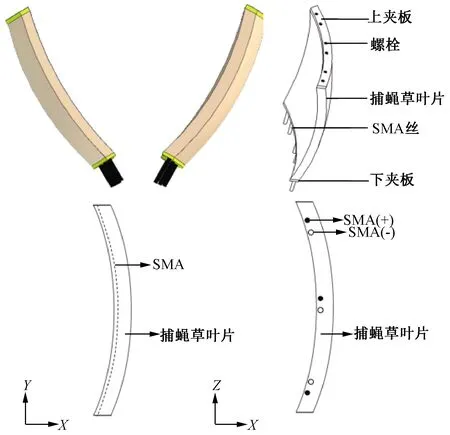
圖6 仿生捕蠅草葉片結構
需要考慮的主要因素有SMA 絲在葉片驅動器內壁的排布方式、SMA 絲在腔體驅動器內壁的固定方式、葉片壁厚、內腔形狀及其結構尺寸、如何進行通電及通電參數的設置。
SMA絲在葉片驅動器內壁的排列方式有兩種,一種為兩端式,一種為全貼合式,如圖7所示。考慮到仿生捕蠅草的設計初衷和兩種排列方式的優缺點,本文采用全貼合式的布置方式,使其在滿足變形條件的前提下,仍具有一定的變形恢復能力和環境適應能力。
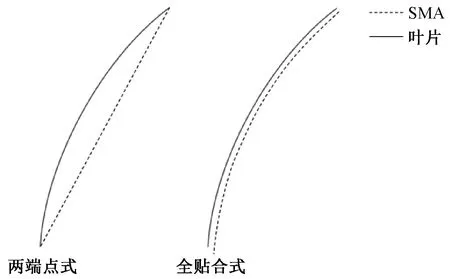
圖7 SMA絲布置方式
將仿生捕蠅草葉片的具體運動過程劃分為如下三步:
(1)當葉片中的 SMA 絲未通電時,葉片本身不發生變形。
(2)當給 SMA 絲施加大小合適的電壓時,SMA 絲收縮,帶動葉片收縮。
(3)當 SMA 絲斷電時,葉片形變恢復,重復以上控制步驟。
考慮到以上問題,采用硅膠澆注固化成型技術制作葉片,按照捕蠅草實物尺寸和形狀確定捕蠅草葉片結構尺寸。硅膠具有流動性,葉片模具是曲面狀態,為了確保硅膠充分填充并保持曲面形態,將模具分為上下兩個部分,如圖8所示。其中,上半部分設計兩處凹槽,主要用于插板,板子上開孔,用于固定SMA絲。上半部分的模具上開小孔,主要用于澆注硅膠以及排出空氣,使硅膠充分澆注。下半部分設計與上半部分對稱的凹槽,用于板子的固定。上下板四周開孔,使用螺釘固定模具,上下兩個部分配合,保證葉片形狀,中間凸面為捕蠅草葉片形狀。
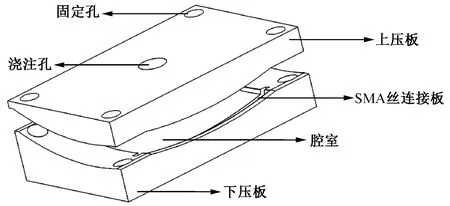
圖8 仿生捕蠅草葉片模具結構示意圖
根據前述仿生捕蠅草葉片的驅動原理可知,對葉片的控制實際上就是對SMA絲的驅動控制。控制好SMA 絲的應力和應變關系是關鍵,而上述特性是受溫度影響的,因此問題就轉化為設計控制系統來控制SMA絲的溫度變化。引起SMA絲溫度變化的方法是加熱和冷卻,其中加熱包括內部加熱和外部加熱。內部加熱主要是通過給SMA絲通電,將電能轉化熱能;而外部加熱主要是通過水加熱或輻射加熱。冷卻包括自然冷卻、強迫對流冷卻、半導體熱泵冷卻和熱池冷卻4種方法。綜合考慮本文設計的仿生捕蠅草SMA驅動原理和空間條件,本文選用比較可靠方便的通電加熱方法和自然冷卻方法。
1.4 仿生捕蠅草的力學建模
基于SMA絲驅動的仿生捕蠅草葉片在設計初始,根據適量控制原理,共三組SMA絲在空間上合理分布,同時控制三組SMA絲的動作,使其能夠完成仿生捕蠅草葉片的彎曲變形。在建立力學模型前,假設葉片彎曲變形結束后,葉片整體處于平衡狀態,即仿生捕蠅草葉片本體和SMA絲以及相應連接元件均處于平衡狀態。葉片本體一端固定,另外一端是自由端,在整體的變形彎曲過程中,不計自重。在葉片的變形過程中,以假想中性層為界,靠近SMA絲的一側受到擠壓,存在壓應力;遠離SMA絲的一側受拉,存在拉應力。SMA 絲嵌入葉片中,當SMA絲加熱時,SMA 絲將發生收縮,從而迫使仿生葉片產生類似于捕蠅草捕捉時的彎曲變形。本文認為任意一點的SMA的應力是相同的,并且到葉片凹面的距離是不變的,故可以認為SMA絲有一個不變的力矩。當葉片呈一定角度彎曲時,可以達到力矩平衡。基于上述假設,建立力學模型如圖9所示,取仿生葉片的一個橫截面做力學分析。根據葉片變形時的受力情況,可以得到平衡狀態下的幾個方程。
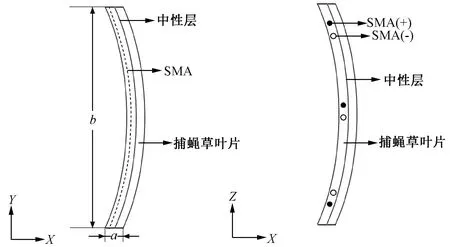
圖9 仿生捕蠅草葉片力學模型示意圖
當葉片呈一定角度彎曲時,可以達到力矩平衡,得到:
Wf=Wb+Wg
式中:Wf為SMA絲產生的力矩;Wb為硅膠產生的力矩;Wg為葉片凹面彎曲后產生的力矩。
Wf=8πσr2
(1)
(2)
Wg=kiθ
(3)
通過上式可以求出彎曲角度θ關于SMA絲收縮量的函數表達式:
(4)
式中:σ為SMA絲的拉應力(mPa);r為SMA絲的半徑(m);E為SMA絲的彈性模量;Y為SMA絲短點的矢量距離;h為SMA絲彎曲的距離;ki為固定常數。
通過控制加熱時間、通電電壓、通電電流,可控制SMA絲的收縮量,依據矢量控制原理,實現葉片的不同角度彎曲變形。
2 仿生捕蠅草的性能實驗研究
2.1 仿生捕蠅草的測試實驗平臺搭建
SMA絲通電后,在電流的作用下發熱,當溫度達到相應的相變溫度時,SMA絲收縮。本文的控制任務相對簡單,控制部分由系統電源、控制芯片、繼電器等三部分組成,如圖10所示。
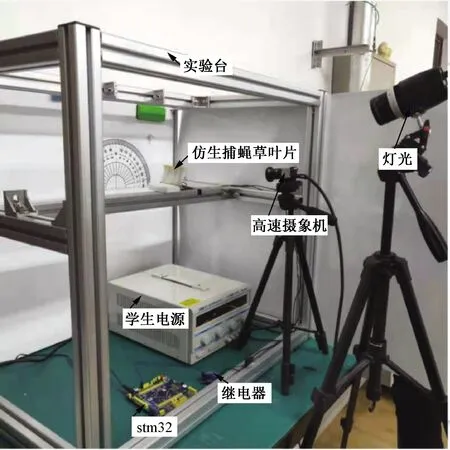
圖10 實驗測試平臺
系統電源采用恒壓恒流可調學生電源,為SMA絲提供電壓以及電流,控制芯片控制繼電器的通斷,從而調節SMA絲的通電時間,以及電流的占空比。通過參數化設置電壓、電流、通電時間以及占空比,研究分析參數對于捕蠅草葉片彎曲性能的影響,為捕蠅草葉片的捕捉實驗提供控制參數。
2.2 仿生捕蠅草的性能實驗研究
本文通過加熱方式來控制SMA絲收縮,合適的加熱時間、加熱電壓和加熱電流是仿生捕蠅草葉片彎曲的基本保障。本小節將通過加熱單側3組SMA絲使其收縮,并驅動仿生捕蠅草葉片實現單次單側的彎曲實驗,記錄實驗中獲取的參數進行研究分析。
通電加熱仿生捕蠅草葉片的單側SMA絲,記錄不同加熱時間下的仿生捕蠅草葉片彎曲的角度參數。采用六種不同的電壓值來做單側SMA絲的加熱收縮實驗,以100 ms為一個間隔,等間隔地增加加熱時間。當無法驅動仿生捕蠅草或者仿生捕蠅草葉片內的SMA絲受損時,停止加熱,以確定最佳控制參數。
分別將2 V、4 V、6 V、8 V、10 V、12 V作為加熱電壓,3 A作為加熱電流,首次通電時間為50 ms,隨后增加至100 ms、200 ms、300 ms、400 ms、500 ms,使用高速攝象機記錄彎曲過程,隨后處理視頻,得到各個通電時間下的最大變化角度,并作對比,如圖11所示。
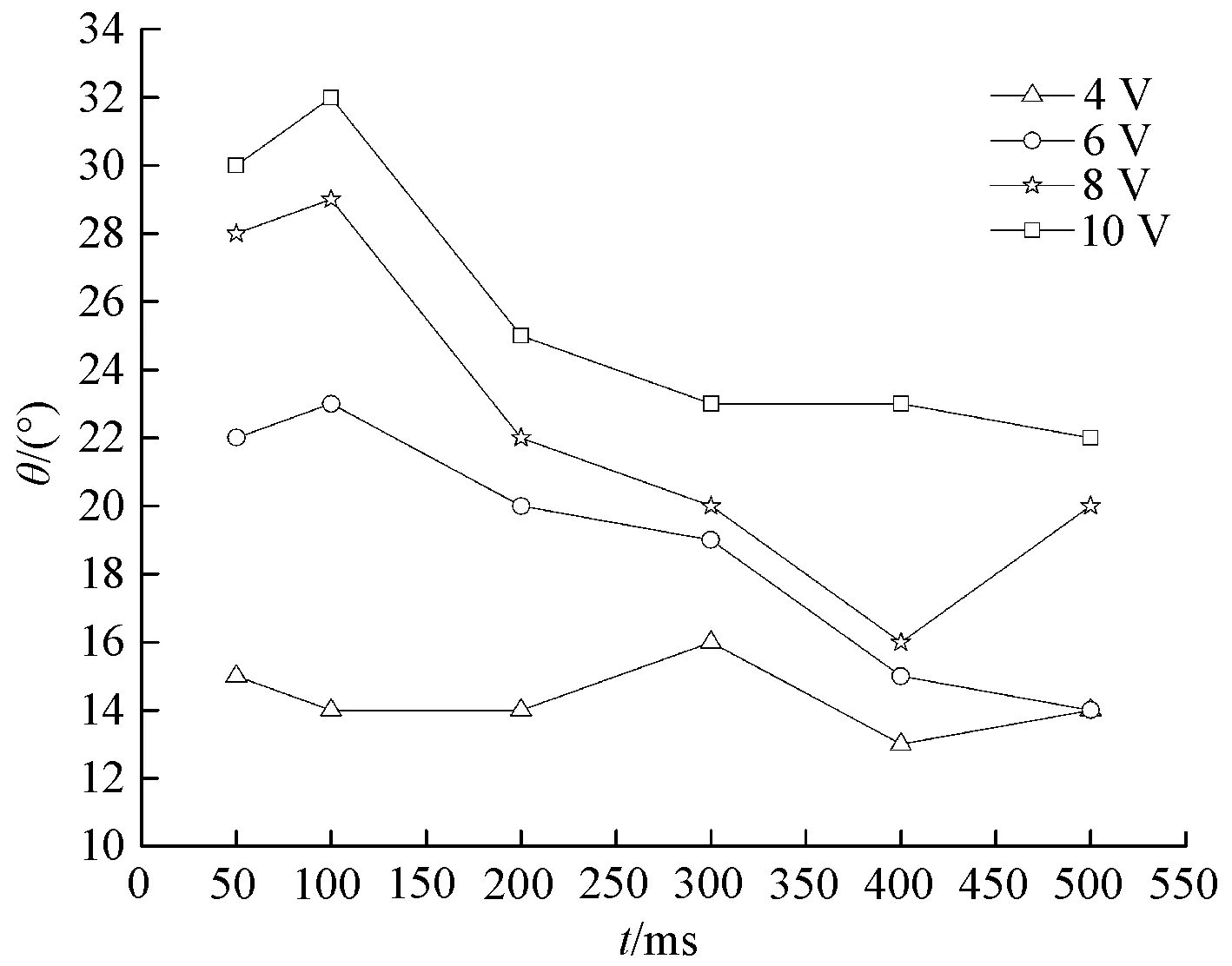
圖11 不同電壓及通電時間下的角度變化趨勢
當初始電壓小于2 V時,SMA絲不發生響應,不會產生收縮現象,仿生捕蠅草葉片呈幾乎不動狀態。用 12 V作為加熱電壓,各個通電時間下,SMA絲溫度升高較快,且溫度較高,SMA絲均被燒斷。由于存在誤差,實驗數據所繪制的曲線大致規律相同,雖然并不完全一致,但是不規律數據的波動較小,證明實驗結果可靠。
捕蠅草的最大彎曲角度隨著通電時間的增加而先增加后減小,最大彎曲角度的峰值普遍出現在通電時間為100 ms時。從圖11中可以看出,通電電壓對捕蠅草最大彎曲角度的影響較大,通電電壓越大。捕蠅草的最大彎曲角度普遍越大。這根據整體規律,可以看出,4 V時實驗誤差較大,這是因為捕蠅草的動作不同步、不均勻。為了保證仿生捕蠅草葉片的捕捉過程快速、同步且彎曲角度較大,選擇電壓為8 V,通電時間為100 ms。
通電電流的大小直接影響SMA絲的升溫速度,進而影響SMA絲的響應時間。為了確定SMA的驅動電流,獲得 SMA 絲在不同電流下所能達到的最大彎曲角度,如圖12所示,得到不同電流強度下仿生捕蠅草葉片的彎曲過程中角度變化。
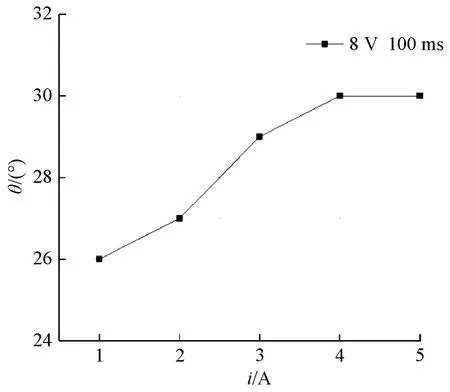
圖12 通電電流與角度變化關系圖
由圖12可知,捕蠅草的最大彎曲角度隨著通電電流的增加而增大,當通電電流達到4 A時,仿生捕蠅草內的SMA絲有變紅現象,說明SMA絲的受熱溫度較高,無法持續反復進行加熱,會影響形SMA絲的性質,從而影響仿生捕蠅草的彎曲性能。
電流越大,響應時間越短。然而電流過大,控制不當,容易造成通電溫度過高,SMA 高溫失效;電流過低,一方面響應時間長,另一方面可能會達不到 SMA 的相變結束溫度,使驅動過程不能完成。因此研究不同電流下SMA 絲的驅動特性,給予驅動器合理的通電電流,對提高驅動器響應速度和防止SMA 過熱失效具有重要的意義。本文選擇通電電流為3 A。
綜上所述,確定仿生捕蠅草葉片最佳的控制參數為8 V,3 A,100 ms。在此控制參數下仿生捕蠅草葉片的彎曲過程如圖13所示,捕蠅草彎曲角度近30°,且響應時間短,能夠在一定時間內恢復到初始狀態。在一定時間間隔內重復彎曲變形動作,變形無明顯衰減,滿足初始設計目標與設計初衷。
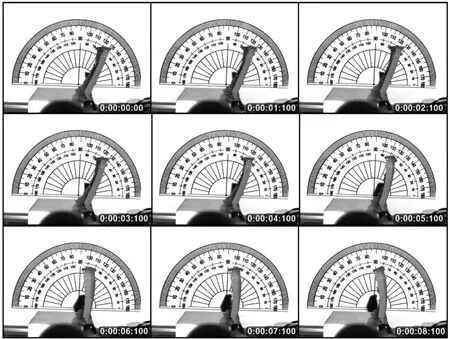
圖13 8 V,3 A,100 ms控制參數下葉片彎曲變形圖
2.3 仿生捕蠅草的功能實驗研究
根據上述實驗,確定實驗的控制參數為通電電壓8 V、通電電流3 A、通電時間100 ms,根據上述參數,進行仿生捕蠅草葉片的功能實驗。使用8 V、3 A的直流電源對SMA絲通電,使仿生捕蠅草葉片向內彎曲閉合。由圖14可知,仿生捕蠅草葉片在一個周期內的運動過程可分為以下三步:
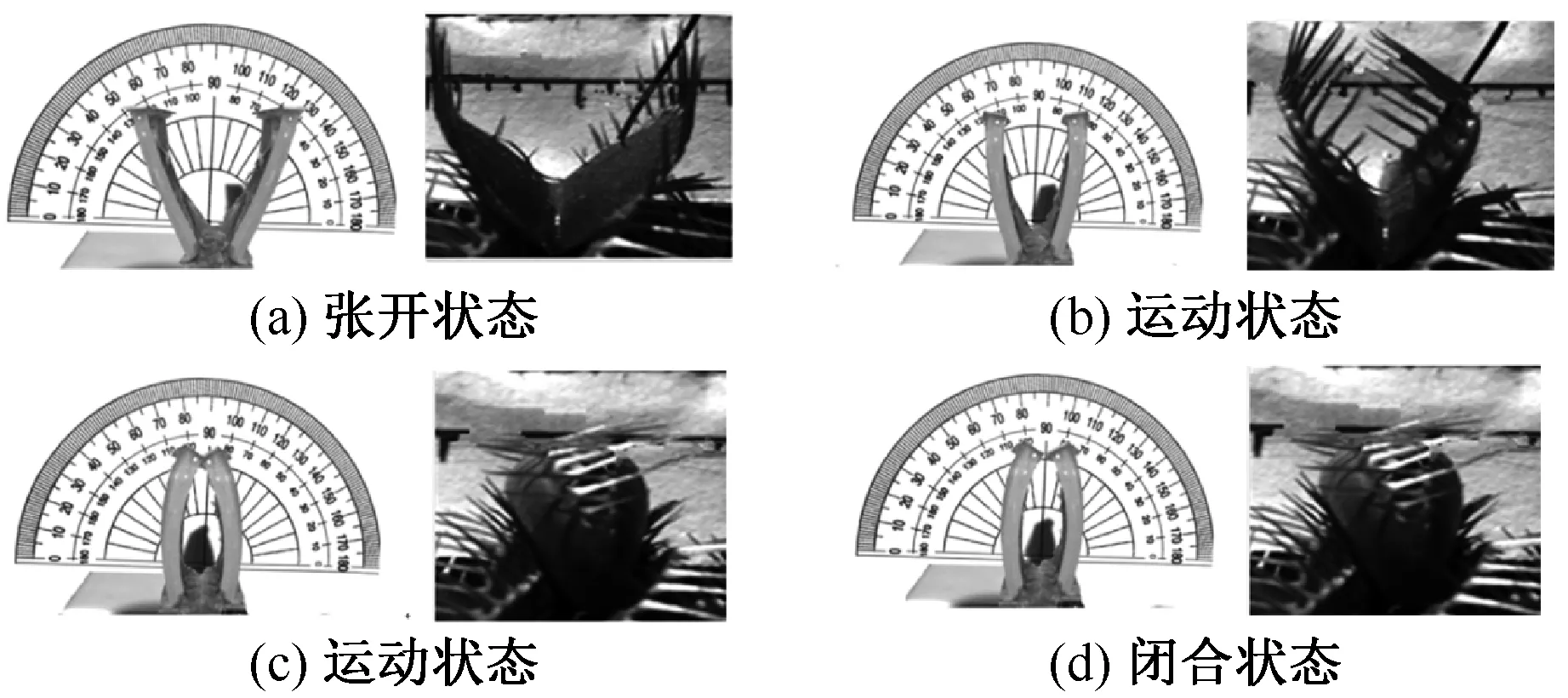
圖14 雙葉片運動變化對比圖
(1)未通電時,仿生捕蠅草葉片處于自然彎曲狀態,根據上述實驗,彎曲角度29°,故將葉片彎曲起始點置于量角器67°、125° 處,也就是說捕蠅草的初始張開角度為58°。
(2)對 SMA 絲施加 8 V、3 A的電壓、電流,當通電時間為 100 ms時,葉片內SMA絲整體收縮,促使仿生捕蠅草葉片彎曲閉合進行捕捉。
(3)斷電狀態時,SMA 絲變形恢復,仿生捕蠅草葉片恢復初始狀態。
將制作的仿生捕蠅草葉片的運動形態與高速攝象機記錄下的捕蠅草變化進行對比,如圖14所示。經過對比發現,仿生捕蠅草葉片運動與實際捕蠅草運動基本一致,能夠滿足捕捉目標。初始狀態下,捕蠅草張開時葉片呈現外凸狀態,進行捕捉后,葉片會由外凸轉換為內凹,從而達到密封狀態。仿生捕蠅草葉片并未達到對葉片狀態轉變的仿生。在運動階段下,捕蠅草葉片運動迅速,仿生葉片能夠在1 s內實現葉片的閉合,達到了與捕蠅草相當的水平。在閉合狀態下,捕蠅草能夠在多個維度上實現屈曲變形,捕捉過程結束后,捕蠅草葉片完全閉合,不留一點縫隙。而仿生捕蠅草葉片由于制作誤差及結構因素,只能夠發生單維度的屈曲變形,導致閉合后存在縫隙,無法緊密閉合,需進行后續的優化設計。
3 結 語
本文設計制作了一款基于SMA絲驅動的仿生捕蠅草,可以在常溫狀態下實現捕捉功能。仿生捕蠅草整體質量輕,結構簡單,最大張開角度達到58°,能夠在1 s內完成葉片的閉合動作。仿生捕蠅草葉片本體材料為硅膠,葉片具有一定的柔性,且在對目標物進行捕捉時具有一定的適應性,具有較好的包裹性。
性能測試及功能性實驗都表明,仿生捕蠅草能夠滿足初始設計目標和設計初衷,響應迅速,對工作環境要求較低且無污染,可重復利用,具有一定的經濟價值。根據實驗測得的數據和實驗過程中出現問題的分析總結,可以對仿生捕蠅草葉片結構進行進一步優化設計,輔之一誘捕裝置,能夠更好地達到捕蠅草的全流程仿生目標,使其能夠全流程完成捕捉任務,從而更好地實現病蟲害防治和蟲情監控。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
發明與創新(2016年38期)2016-08-22 03:02:52
