直線形壓電致動器的研究綜述
2021-11-16 01:46:00郭戰雨韓海濤蘇秩榮
微特電機 2021年10期
李 爭,郭戰雨,韓海濤,蘇秩榮
(河北科技大學 電氣工程學院,石家莊 050018)
0 引 言
隨著對精密定位的要求越來越高,壓電致動器在微驅動和微操作領域起到了重要作用,科研人員對這領域的探索越來越深入[1-4]。與傳統的電磁致動器不同,壓電致動器是利用壓電陶瓷的逆壓電效應來激勵定子彈性體的振動,通過與動子的接觸摩擦來實現位移輸出,其不會受到電磁干擾的影響,可以在強磁環境中穩定運行。此外,壓電致動器還具有結構設計簡單、輸出力矩大和起動速度快等優點[5-8]。研究學者在壓電致動器領域提出了眾多類型的結構,適用于不同的場合,其中線性壓電致動器能夠直接產生直線運動和輸出推力,可以步進和伺服工作,開發應用前景廣闊[9-11]。
直線形壓電致動器是壓電致動器中一個分支,其具有長行程運動、定位精度高和控制策略簡單等優點。在長時間的發展中,已研究出數百種結構的直線形壓電致動器,其結構設計越來越完善且精密度不斷提高,但尚未大規模地應用于生產生活中[12-14]。相對于電磁致動器而言,壓電致動器的發展還遠遠不夠成熟,在結構實用性、動力學分析、運行摩擦損耗分析和運動反饋控制等方面還需要研究學者進行大量的研究和實驗來建立完整的體系理論[15]。
本文對動子運動方式為線性的壓電致動器作了歸類概述分析,根據不同的工作機理,將各類型致動器進行劃分,并列舉了國內外研究學者設計的典型結構,對其特點和運行機理進行了歸納與總結,然后探尋了直線形壓電致動器的當前應用及未來面臨的挑戰。
1 直線形壓電致動器的概述
直線形壓電致動器的組成通常包含壓電元件、定子彈性體和滑塊(動子)。其致動原理是利用壓電元件激勵定子彈性體的振動,在驅動端產生橢圓軌跡、斜直線運動或慣性推力等驅動滑塊進行線性運動[17-18]。因致動器種類繁多,可以從不同角度來描述它們的工作機理,現在有多種分類標準,如圖1所示,本文從致動器的振動狀態上將其分為諧振式和非諧振式兩種類型。諧振式壓電致動器利用電流激勵定子產生高頻振動,激勵頻率一般大于20 kHz,也可以稱作超聲波電機,其工作在諧振頻率處驅動動子最大速度可以超過1 m/s。非諧振式壓電致動器利用低頻電壓激勵定子彈性體的靜態形變,直接產生驅動力驅動滑塊的線性運動,能夠長行程運動且具有納米級驅動能力[19-21]。
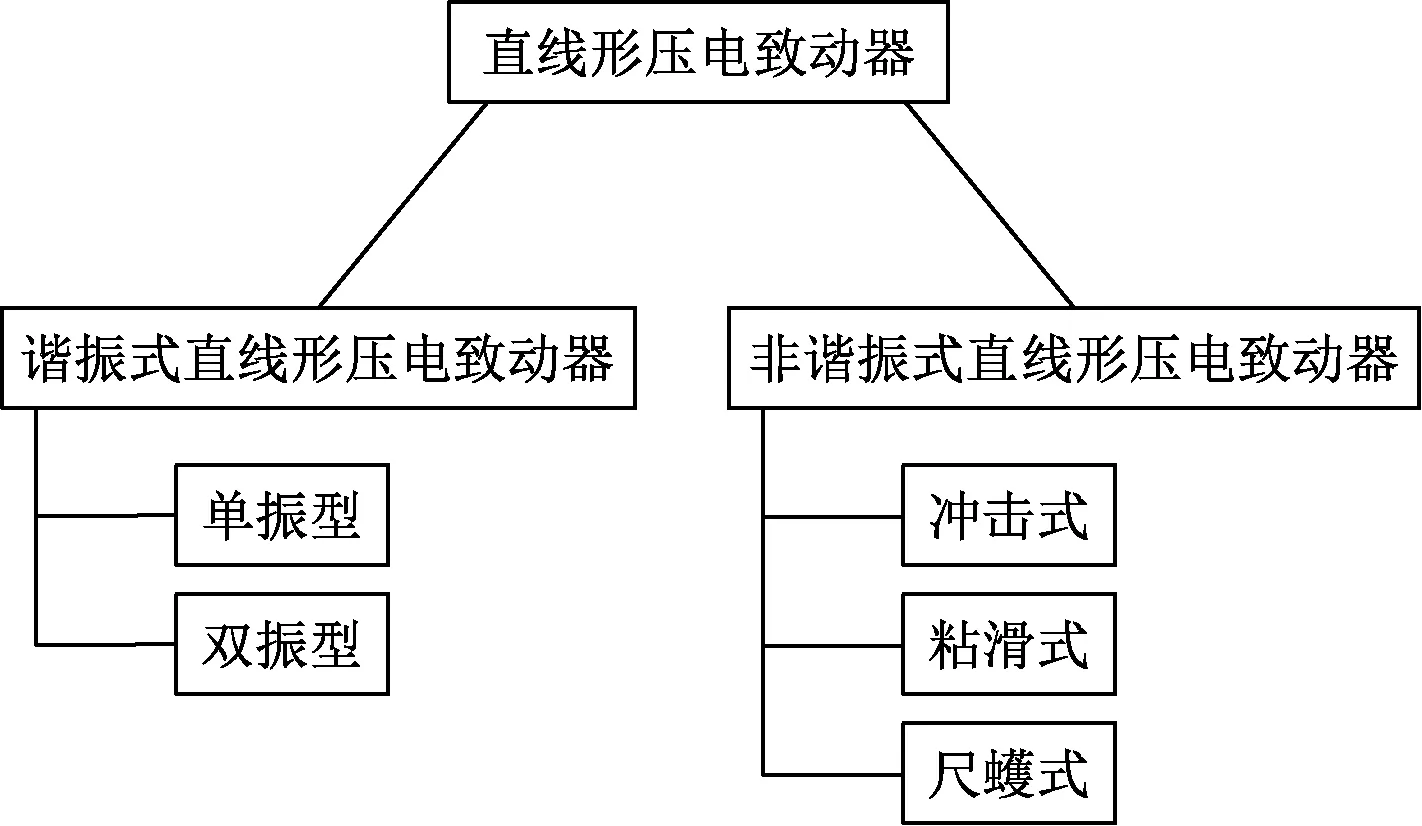
圖1 直線形壓電致動器的分類
諧振式直線形壓電致動器是利用定子的振型疊加或者特殊傳動結構設計來驅動動子。從致動器的振動形態上可以分為單振型和雙振型[22-23]。通過諧振工作狀態,可以獲得高速的線性運動,張帆等人利用兩個對稱的朗之萬振蕩器設計的新型直線壓電致動器最高速度可達947 mm/s[24],劉英想等人設計的彎曲振動的大功率直線壓電致動器的速度可以達到1 527 mm/s[25]。然而,諧振式壓電致動器的位移分辨率通常被限制在微米或者亞微米級。Asumi等人改進的V形壓電致動器精度為20 mm[26],Yoon等人設計的小型直線壓電致動器精度達到了3.12 μm[27]。
與諧振式壓電致動器相比,非諧振式壓電致動器具有較高的運動分辨率,通過調節電壓,致動器可以產生納米級分辨率的微變形。徐冬梅等人設計的非諧振壓電致動器步進位移精度可以達到50 nm[28],李建平等人利用寄生運動原理提出的新型壓電致動器,分辨率達到了10 nm[29]。此外,在非諧振壓電致動器設計中不需要考慮頻率退化,并且致動器在長時間運行中沒有明顯的發熱。目前為止,已經提出了具有不同配置和工作原理的非諧振壓電致動器,其中,具有線性驅動能力的非諧振壓電致動器主要分為沖擊式、粘滑式和尺蠖式[30-31]。
2 諧振式直線形壓電致動器的機理分析
2.1 單振型
單振型相比于雙振型壓電致動器,其僅僅需要一種模態振型便可驅動動子進行線性運動,施加的電壓信號也較為單一,所以致動器的驅動控制策略更加簡單。單振型的直線壓電致動器通常將定子設計為一種特殊結構,利用壓電元件激勵其相應的振動模態,在定子驅動端產生縱向和橫向的耦合位移,通過定子和動子之間的摩擦接觸驅動滑塊線性運動。單振型壓電致動器不需要調整兩個振動模態的諧振頻率大小,這就使得單振型致動器的設計更加易于小型化。1998年,哈爾濱工業大學何思源等人研制了一種駐波雙向直線超聲波電動機[32],如圖2所示。這種直線超聲波電動機的基本原理是駐波波峰右側的凸起對壓在突起上的滑塊產生對角推力向右移動。同理,波峰左側的突起使滑塊向左移動。通過激勵振動模態B3或B4,在波峰右側或左側形成凸起。該超聲波電動機構造簡單,驅動控制方便,最大速度達到200 mm/s且分辨率小于0.1 μm。
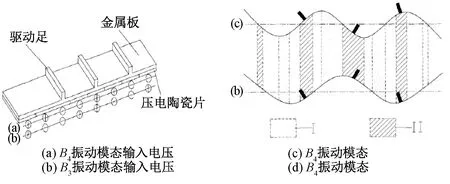
圖2 板式駐波雙向直線超聲波電動機
2017年,哈爾濱工業大學張強等人[33]設計了一種定子為蛙形結構的致動器,通過其一階振動模態在驅動端產生斜直線軌跡來驅動滑軌,其結構如圖3所示。驅動部分僅由一組沿厚度方向極化的壓電陶瓷按正負相間排列組成,通過壓電陶瓷激勵推動或拉動與其相連接的前后角結構。驅動足為W形臂的結構,使得其能夠在被推動時產生橫向擴張的運動,以此提供對動子的夾緊力,結合壓電陶瓷本身的縱向形變使驅動足產生縱向運動,從而使具有對稱結構的驅動器上下兩部分能夠交替驅動動子運動。電機在電壓值為275 V的激勵下,空載速度為241.6 mm/s,在預壓力60 N下,推力為11.8 N。
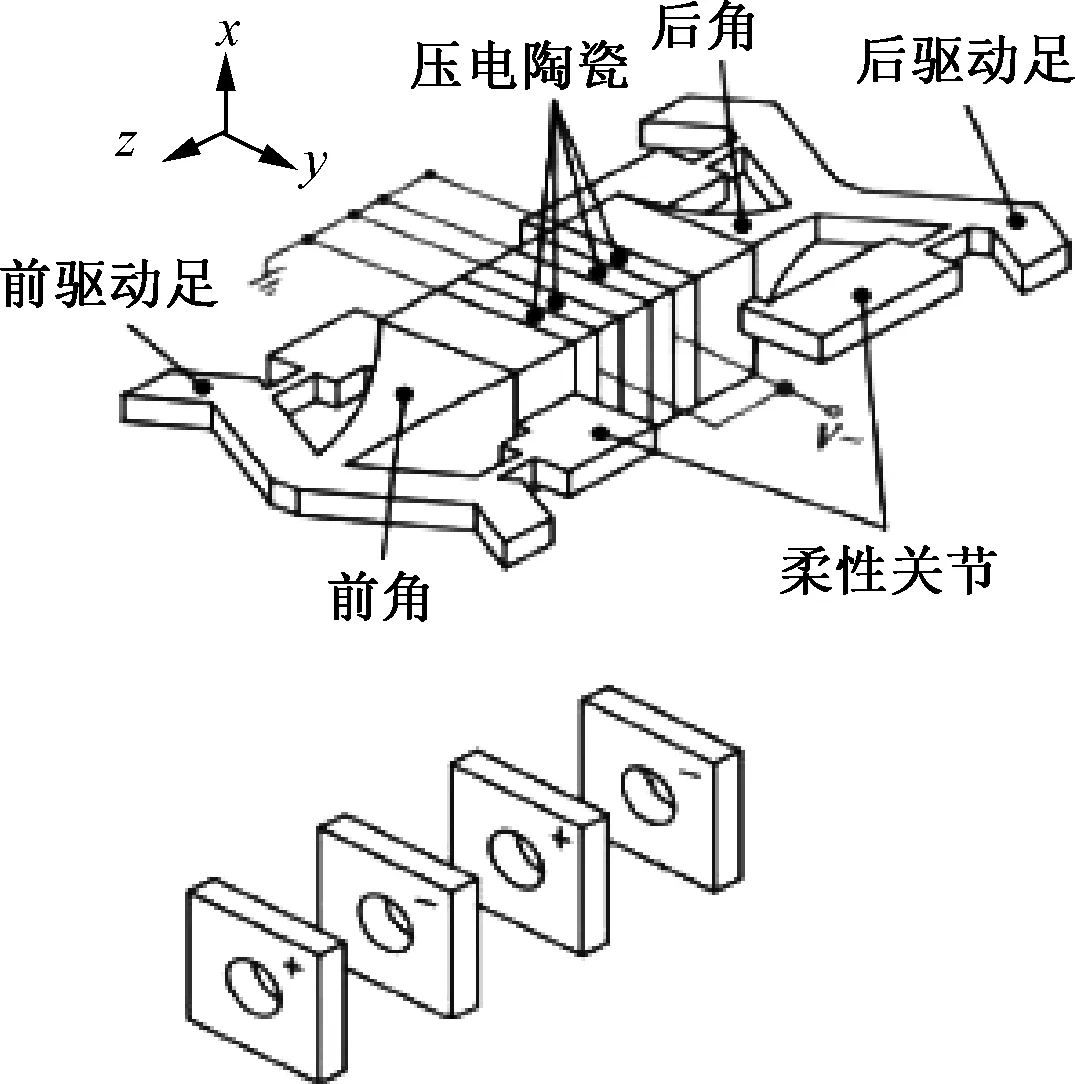
圖3 蛙形線性壓電致動器
2.2 雙振型
雙振型壓電致動器一般采用兩種不同的工作模態,進行疊加耦合后,在驅動足附近生成橢圓運動軌跡。對壓電陶瓷片施加兩相具有一定相位差的交流電壓,激勵產生兩種不同振動模態,改變電壓信號的相位,可以實現動子反向運動。此外,兩種激勵信號可以獨立調節橢圓運動的推動分量和擠壓分量,因為其縱向位移和橫向位移由兩種振動模態控制。圖4為該類型致動器驅動足的軌跡位移圖。通過兩個模態的疊加,驅動足會經歷4個位置形成一個橢圓,在橢圓的后半部分會與動子接觸,推動其產生一段位移。

圖4 定動子接觸軌跡圖
兩種振動模態耦合一般為兩個不同方向的模態,例如縱向振動和橫向振動、縱向振動和扭轉振動、橫向振動和扭轉振動、兩種正交的縱向振動、兩種正交的橫向振動和兩種正交的扭轉振動等。致動器定子分別提供兩個方向的振動模態,其頻率需要十分接近,以保證電機運行的穩定性。圖5為雙振型壓電致動器尺寸調整參數流程圖。首先需要設計好模型的大概尺寸,選擇比較靈敏的位置進行兩個諧振的調頻,經過多次修改靈敏處的參數大小來構建參數化方程和尺寸變化范圍,將每一次設置好的結構模型參數代入有限元仿真軟件中,并提取和比對兩個振動模態頻率的大小,直到其差值達到所設定的范圍內。
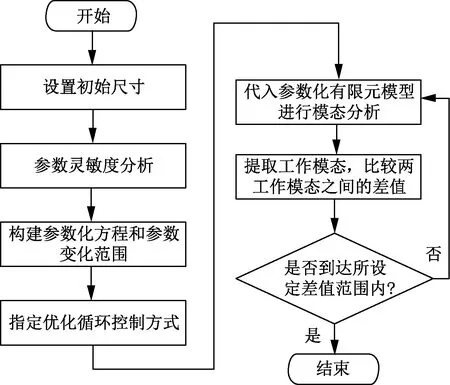
圖5 雙振型壓電致動器調整參數流程圖
1998年,東京大學Kuribayash等人[34]首次提出了采用兩個夾心振動器的超聲波電動機,即V形壓電致動器,致動器在頂端以直角相交,結構如圖6所示。它有兩種振動模式,分別為對稱模態和非對稱模態,采用對稱模態激勵驅動端產生法向運動,非對稱模態激勵驅動端的橫向運動。致動器采用熱處理后的高強度鉻錳鋼螺栓連接壓電陶瓷片,該材料具有承受沖擊、擠壓、物料磨損等惡劣工況的特性,可提高致動器的輸出力和功率。致動器空載最大速度為3.5 m/s,當驅動電壓為500 V,預緊力為150 N時,輸出推力可以達到39 N、速度為0.55 m/s。
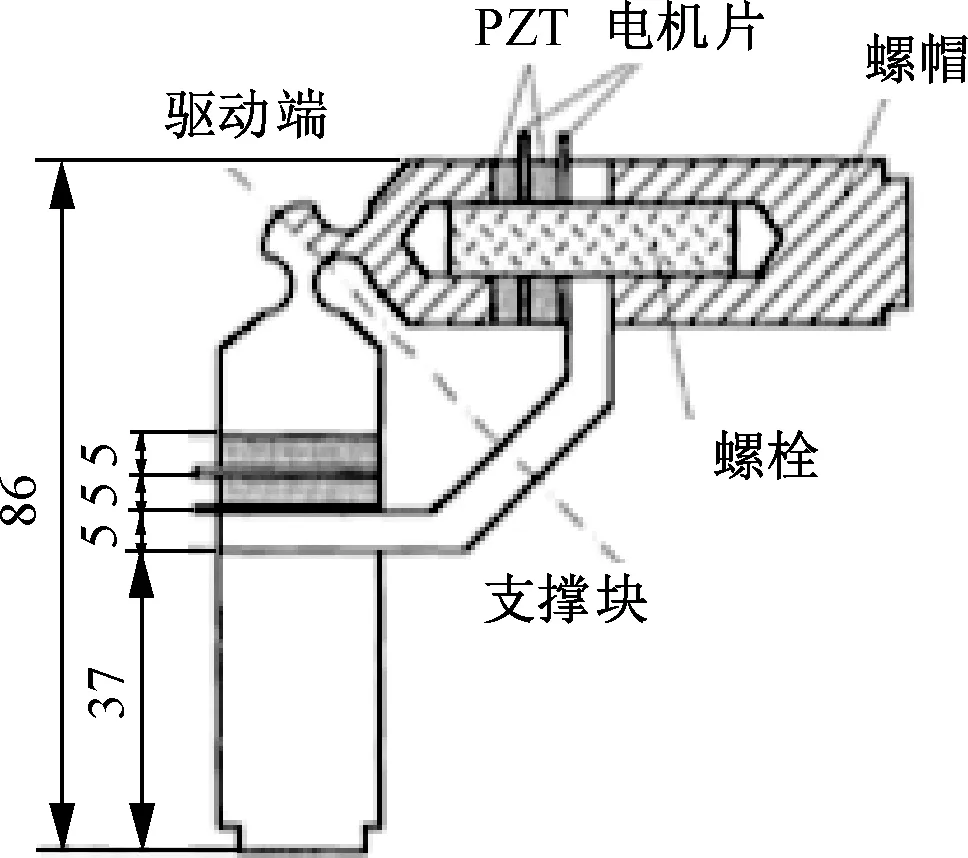
圖6 V形壓電致動器
2013年,哈爾濱工業大學的劉英想等人[25]提出了一種彎曲振動的大功率直線壓電致動器。致動器由兩部分相同且對稱分布的結構組成,使用共8個沿厚度方向極化的方形陶瓷疊片,兩兩結對作為驅動源,結構如圖7所示。將兩組壓電陶瓷片橫向排列使其縱向偏振,同理,將兩組壓電陶瓷片縱向排列使其橫向偏振。將4組陶瓷片進行組合后,通過信號激勵便可在驅動足處形成橢圓軌跡的運動,利用驅動足下表面作為與動子的接觸部分,對動子進行驅動。致動器在空載情況下,速度可以達到1 527 mm/s,輸出推力為50 N。
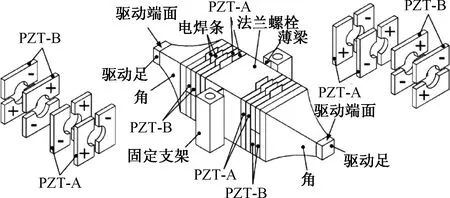
圖7 雙足彎振直線形壓電致動器
2018年,沙里夫理工大學的Sanikhani等人[35]提出了一種橢圓金屬定子的壓電致動器,利用橢圓形的兩個正交振動模態疊加產生橢圓軌跡,致動器由橢圓形定子、支撐結構和直線滑軌構成,如圖8所示。在橢圓殼體內部,沿主軸方向安裝了兩個被中心質量隔開的壓電陶瓷疊堆,在定子內產生所需的振動。壓電陶瓷片是圓形結構,通過螺柱螺桿機構在橢圓殼和中心質量之間施加預壓力。這種預壓力調節的方式確保了致動器振動的完整傳輸結構,但預壓力不可過大,否則會引起定子開裂。其結構設計比較新穎,實驗表明,電壓為70 V和預緊力為12 N下,電機空載速度為40 mm/s,最大推力為1.55 N。
在現階段的研究中,經過科研人員的不懈努力創新,各種結構的諧振型壓電驅動器被設計開發出來,其利用壓電振動激勵的方式有著不可比擬的優勢,但由于致動器主要傳動方式還是以摩擦耦合為主,如果長時間運行,定動子間的摩擦會引起接觸端溫度上升明顯和金屬材料的損耗嚴重,這會直接導致定子的諧振頻率漂移,從而導致電機運行性能的下降,在實際應用上尚存在不足,目前大部分所設計的致動器還只能停留在實驗室階段。但也有部分致動器在實際應用中進行嘗試,如蘆小龍等人利用線性壓電致動器設計了太陽能電池板的清潔系統,有效地提高了發電效率[36];陳超[37]等基于蝶形線性壓電致動器設計了二自由度位置工作平臺,并建立了一種特殊的精密位移測量系統;黃郅博等人[38]通過球形定子設計了一種多自由度壓電致動器,其具有體積小、速度快等優點,可應用于機器人視覺驅動系統中。諧振式壓電致動器能夠被真正應用在實際中是一個漫長的過程,這個過程需要眾多科研人員的不懈努力。
3 非諧振式直線形壓電致動器的機理分析
3.1 沖擊式
沖擊式直線形壓電致動器是利用物體塊的質量差,不斷地重復緩慢伸長和快速收縮兩個動作實現動子的長行程運動,圖9為其工作原理圖。致動器結構主要包含主體m1、壓電陶瓷片疊堆和慣性塊m2組成,大體工作周期可分為3個階段。
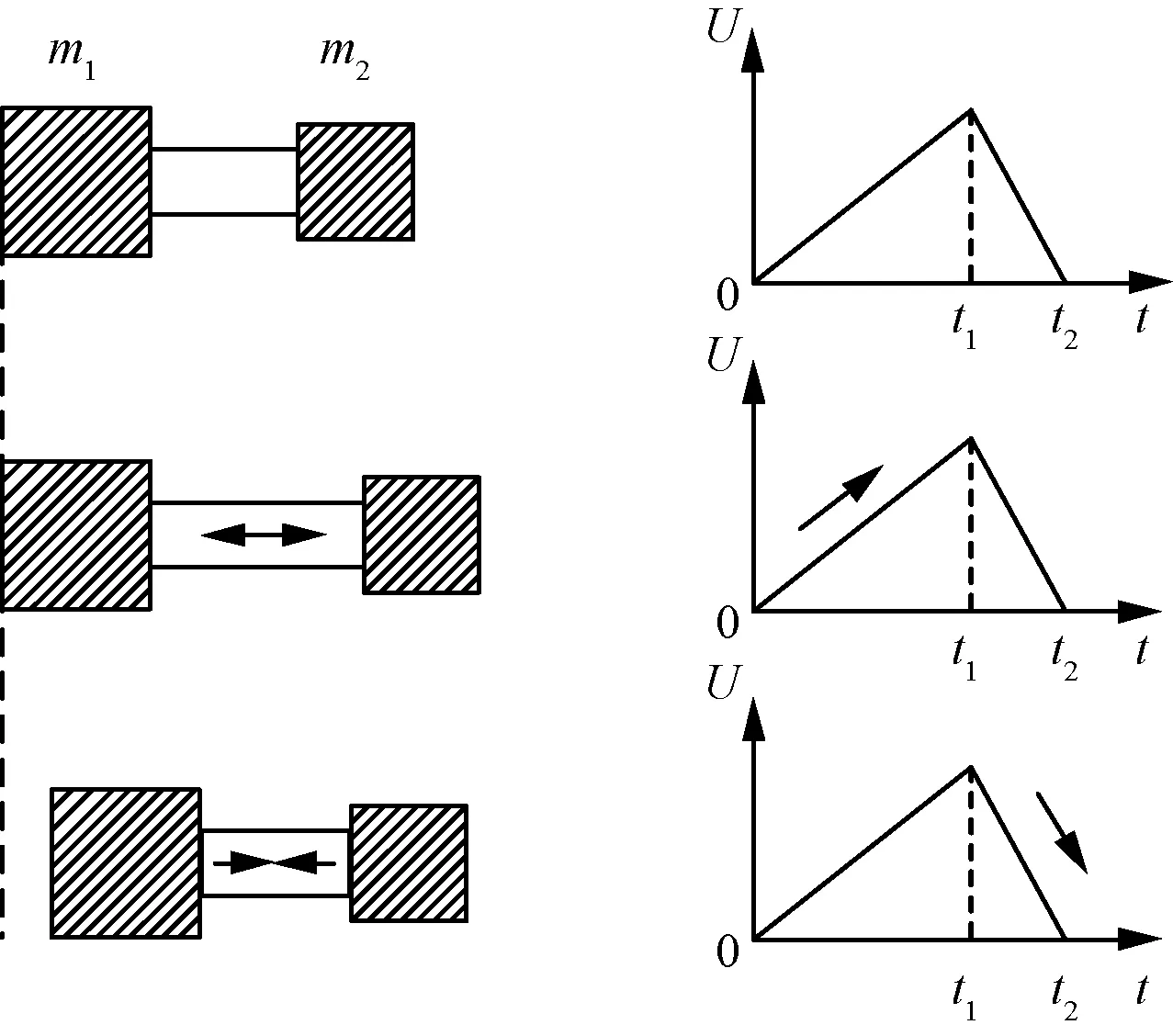
圖9 沖擊式壓電致動器的工作原理
(1)t=0時,整個電機處于初始狀態。
(2)0~t1時,壓電陶瓷疊堆在鋸齒波信號的激勵下緩慢伸長,慣性塊隨著疊堆伸長向右移動,而主體在電機與地面的靜摩擦下保持靜止。
(3)t1~t2時,施加快速衰減的鋸齒波信號時,壓電陶瓷疊堆迅速收縮,對主體產生慣性沖擊力。若向右的慣性輸出力比它們之間的最大靜摩擦力還要大,則其向右移動一段距離。通過這樣多個周期連續作用,就可以實現長距離運動。
2014年,吉林大學的曾萍等人[39]提出了一種非對稱慣性沖擊式的直線形壓電致動器,它是由兩個不對稱壓電智能懸臂梁(以下簡稱PSC)在工作中產生慣性沖擊力來驅動的,如圖10所示。當PSC受到典型諧波電壓信號激勵時,由于其前后振動時夾緊位置不對稱,故每周期內會生成兩個方向上的微小位移,通過微小位移的累積將實現長行程的運動。對該致動器進行實驗測試后,其分辨率為0.02 μm,最大速度16.87 mm/s,在電壓100 V和35 Hz的情況下,最大負載質量可達1 kg。
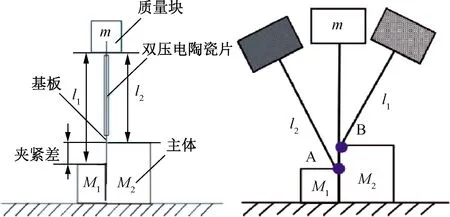
圖10 非對稱慣性沖擊驅動壓電微致動器
3.2 粘滑式
為了提高壓電致動器的輸出速度,通常采用增加驅動周期位移、提高驅動電壓、驅動頻率和減小反向運動的方法。當前,為改善速度,粘滑型致動器大多采用提高激勵頻率的方法,但由于壓電疊片結構復雜,高頻鋸齒波會影響執行器的壽命,高頻高壓激勵下壓電疊片會增加其熱量。因此,提出一種結構簡單、頻率較低、速度較快的壓電粘滑致動器具有重要意義。
近年來,粘滑式壓電致動器因其結構簡單,驅動效率高等優勢成為研究學者的研究熱點。提出并驗證改善致動器的輸出速度的方法是科研人員探索的重要方向之一,相對之前增大激勵電壓和頻率的方法,在結構上做出變化更加切合實用。
2019年,長春工業大學的陸曉惠和高強等人[40]提出一種基于位移放大柔性鉸鏈機構的壓電致動器,充分利用三角形鉸鏈的變化,大大地提高了橫向輸出位移,致動器結構和放大原理如圖11所示。當繞著O點逆時針運動時,即OB至OB′,OA至OA′,角度Δθ可表示:
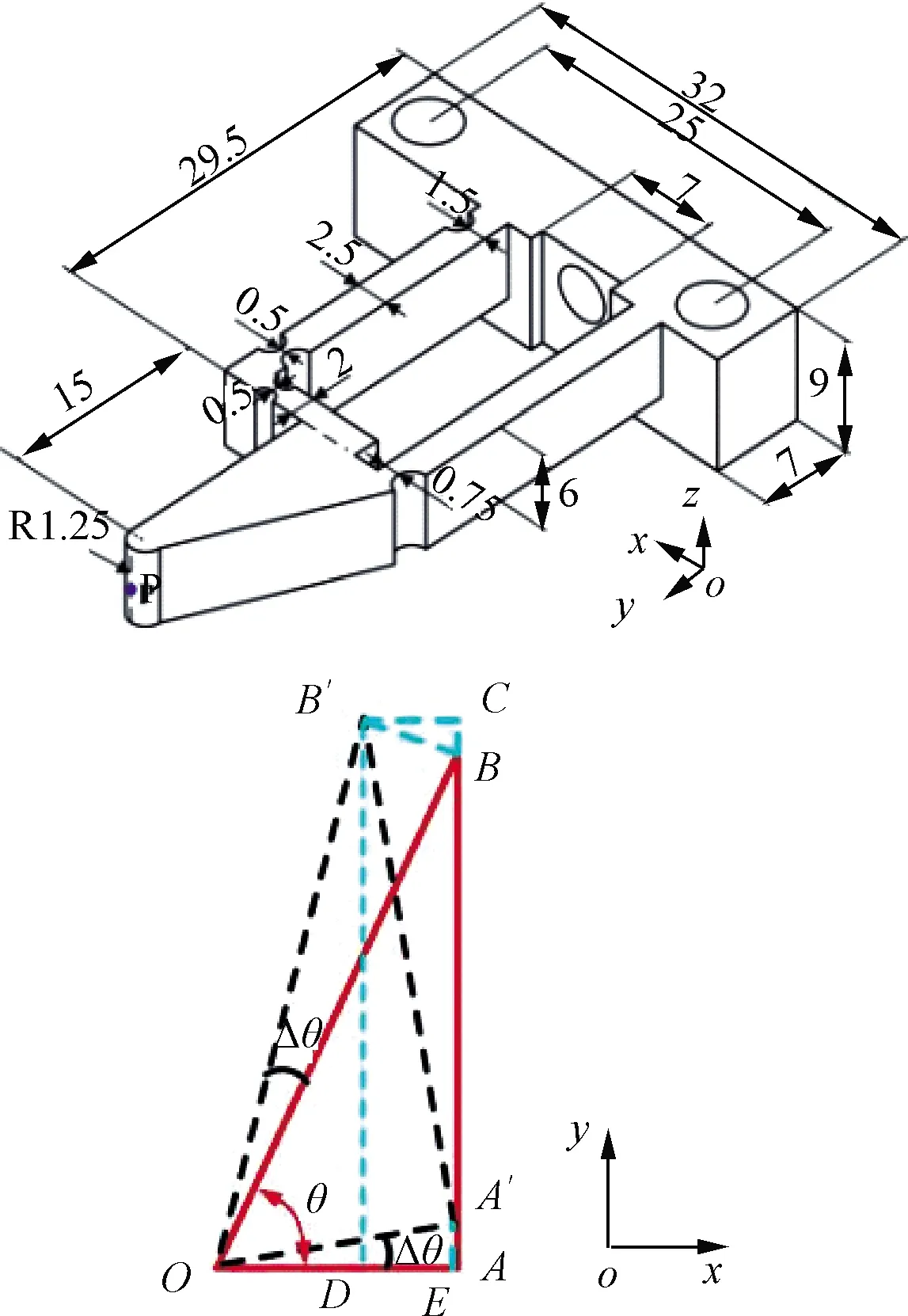
圖11 基于三角放大位移的粘滑壓電致動器
在y軸增大的位移BC可表示:
BC=B′D-AB=OB′×sin(θ+Δθ)-AB
在x軸增大的位移CB′可表示:
很明顯,在此結構下為滑軌運動提供了較大的橫向位移,實現了利用三角位移放大機構可以在較低的頻率下實現較高輸出速度。
2019年,浙江師范大學溫建明等人[41]在之前科研人員的研究基礎上,開發了一種采用兩部分相同結構的非對稱柔性鉸鏈來改善壓電致動器輸出性能,如圖12所示。在該研究中,彎曲機構為非對稱形狀,一般情況下,壓電疊堆沿其縱向方向只能實現一次運動,但在非對稱柔性機構的幫助下,一個壓電堆疊在x和y兩個方向上產生了兩個運動。利用x方向的寄生運動驅動滑塊進行線性運動。然而,只有一個彎曲機構不能獲得步行式運動,至少需要兩個彎曲機構(腿)。另外,輸入電壓是方波的形式,且幅值是相同的,只是它們的相位不同。因此,這兩個驅動器能夠交替工作,使滑軌像人行走的姿態一樣運動,十分新穎。
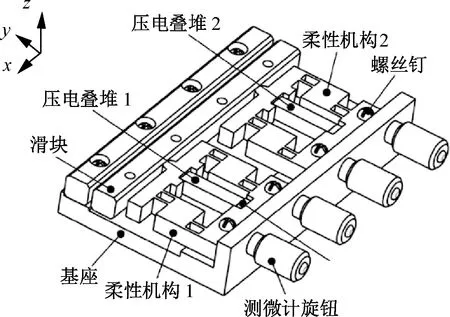
圖12 行走式粘滑壓電致動器
相比于前兩種結構通過增大輸出位移的方法來提高速度,2020年吉林大學楊志新等人[42]為了抑制粘滑型壓電致動器普遍存在的向后運動問題,提出一種柔性鉸鏈為扇形的致動器。此設計能更好地通過其彈性恢復來產生向前的摩擦力,從而提高致動器輸出效率,其結構如圖13所示。由于驅動電壓從最大值迅速降為零,造成反向摩擦力能夠產生相反方向的運動,所以抑制反向運動的基本思路是產生一個正向摩擦力來平衡反向摩擦力。為此,設計了具有特定弧形結構的柔性鉸鏈,在快速降低驅動電壓的過程中,通過柔性鉸鏈的彈性恢復來平衡反向摩擦力。這在一定程度上提高了電機的周期運動位移,在抑制反向運動方面從結構上提供了思路。

圖13 反向抑制壓電致動器
3.3 尺蠖式
尺蠖致動器是一種模仿尺蠖運動的仿生裝置,通常由一個進給模塊和兩個夾緊模塊組成,它可以長距離運動且可提供納米級的精確定位。
2004年,多倫多大學Peter等人[43]基于通用電機框架和計算機設計工具實現了一種尺蠖精密定位器,這是一種典型的尺蠖型致動器結構,圖14為其具體結構和一個周期內的工作機理。此模型采用3個壓電驅動元件,豎直的2個用于夾緊,另外1個壓電疊堆用來產生橫向位移,3個致動器密切配合,致動器的運動范圍直接受滑軌的長度影響,其結構非常巧妙。此致動器在運動方向上的剛度為88 N,最大推力150 N,移動速度可輕易實現8 mm/s,最高可達到20 mm/s。
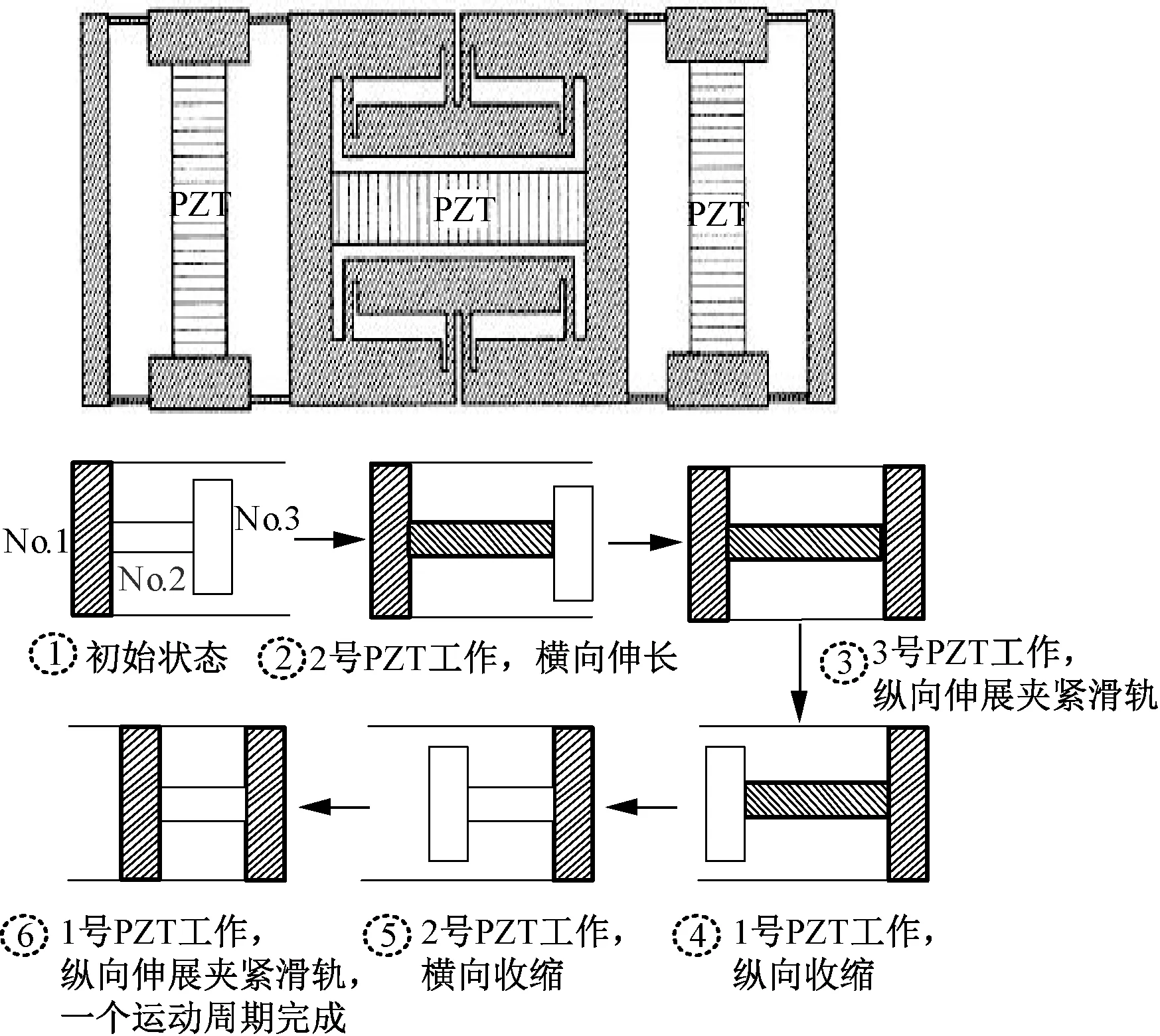
圖14 尺蠖式壓電致動器及其驅動順序
2020年,西安電子科技大學董航加等[44]設計了一種尺蠖式壓電致動器,這個設計在之前尺蠖型的基礎上加了位移放大結構,使致動器輸出位移更好,其由1個驅動機構、2個夾緊機構、2個彈體和3個PZT疊層組成,如圖15所示。夾緊機構包括杠桿式放大機構、彈體、調節螺釘和PZT疊層,執行機構的主要結構為杠桿式放大機構和橋式機構,通過杠桿式放大機構與彈性體的配合實現斷電夾緊,降低功耗。致動器的最大速度為0.72 mm/s,最大位移達11 mm。
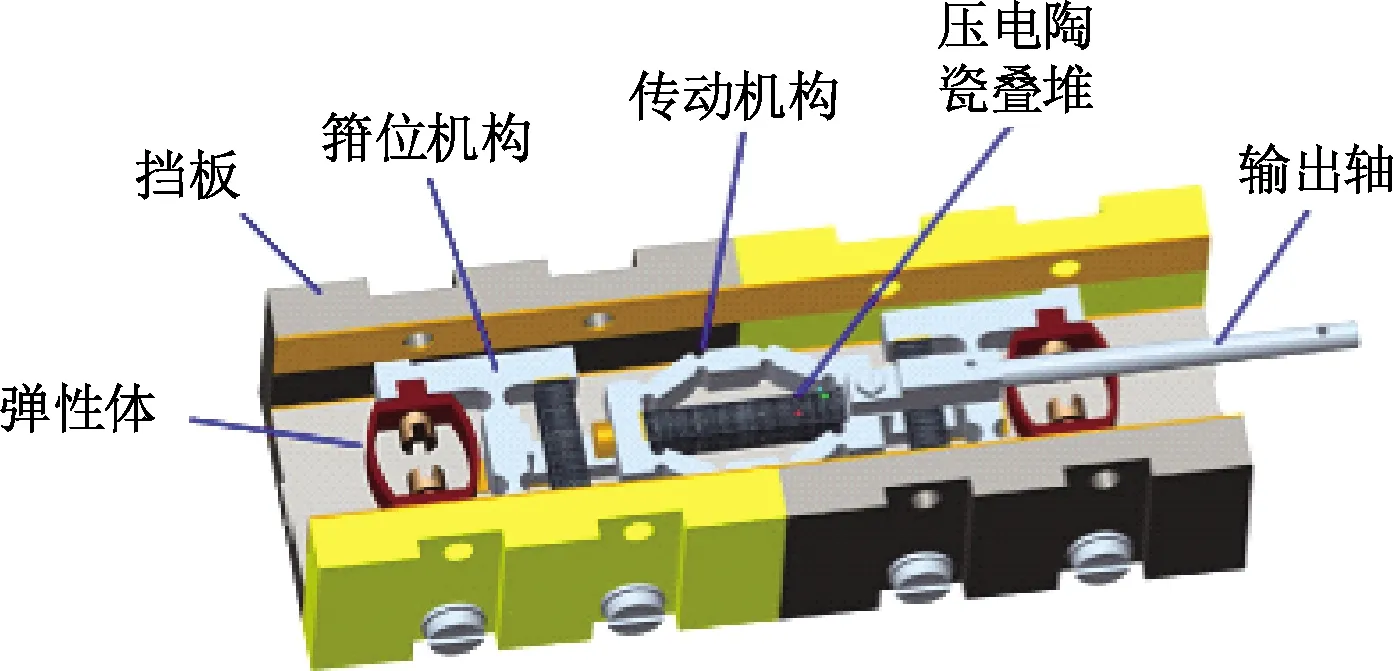
圖15 尺蠖式壓電致動器
綜上所分析的在非諧振方式下工作的壓電致動器,它們大都具有分辨率高,發熱小,結構多變,輸出力大等優點。但也有很多的不足之處,比如尺蠖型和粘滑型驅動器,它們都是利用物體的慣性摩擦來驅動動子,雖然具有大量程位移的工作能力,但反向運動現象也是不可避免的,這也是影響致動器效率的關鍵因素。現如今抑制向后位移的辦法還不是很多。尺蠖型驅動器也能夠實現無限量程運動,運動精度也很高,這類驅動器因為它的工作機理,所以大多能夠實現線性運功,旋轉運動的研究設計較少。吉林大學李建平[45]等人提出的模型則為實現旋轉運動提供了一定的參考,但這類致動器也有一定的不足,主要體現在結構和控制策略復雜,加工樣機難度相對較大等方面,如何設計較為簡單的尺蠖驅動器顯得尤為關鍵。
4 總結及展望
直線形壓電致動器的發展很大程度上解決了電磁類電機在某些場合應用的限制。直線形壓電致動器結構上設計多變,驅動簡單,能夠根據特定的工作場合來設計結構,同時可以直接驅動裝置。現在,壓電致動器的尺寸越來越趨向精密化,在高精端領域中應用十分廣泛[47]。但壓電類致動器的發展相比電磁電機總體上還是不成熟的,應用在工業場合的案例相對較少,且同時存在一些工作不穩定現象,針對該現象所出現的一些問題需要進一步去探究和解決。為了將來在多個領域中能夠應用直線形壓電致動器,還需要研究學者繼續進行大量的努力,未來可以考慮從以下幾個方面進行改進及優化:
(1)電磁壓電混合驅動
經過上述討論分析可發現,不管是諧振型還是非諧振型的壓電致動器,速度和工作效率上都存在一定的不足。與電磁類電機共同作用工作是改善這些問題的一個思路,將二者的優勢能夠協同配合起來,現在已經有這方面的研究工作了,但目前該領域的研究在摸索階段,接下來需要進一步去探究。
(2)抑制發熱摩擦等問題
粘滑型致動器長時間工作時會產生發熱現象,這種現象會影響到致動器的壽命和效率,所以發熱問題需要重點處理。并且,大部分的粘滑型都是依靠位移放大機構來提高位移,對向后運動位移的抑制方法研究較少,如果能有效地解決發熱摩擦問題,未來直線形壓電驅動器的性能勢必得到巨大提升。
(3)控制算法的優化
相比于電磁類電機的控制方法,諧振頻率下工作的超聲波壓電致動器就顯得比較復雜,受其他條件的影響十分明顯,比如摩擦發熱、預壓力、驅動頻率、能量轉化等,這些條件在控制方面會使致動器呈現非線性特性,加大了對電機的控制難度。在未來能夠使致動器的控制策略向著微型化、簡單化、穩定化方面發展尤為重要。
(4)應用場合的擴展
現如今,壓電致動器只能應用在一些特定的精密場合,比如航空航天、定位平臺和相機鏡頭等領域。相對來說,這些應用場合偏少,并且很難商業化開發應用。隨著研究的深入,將壓電致動器應用于日常生產生活具有革命性的意義。
5 結 語
本文首先對直線形壓電致動器進行了概括,對其不同驅動原理下的分類進行了說明。然后對直線形壓電致動器的運行機理及傳動方式進行了歸納。電機適用于線性方向傳動且結構設計靈活,將復雜的傳動系統簡單化,不僅減小了電機的體積,而且在效率上有了進一步提高。最后總結了直線形壓電致動器并對發展前景進行了相關分析。雖然許多直線形壓電致動器還在實驗階段,并沒有達到工業生產化的需求,但是其擁有廣闊的應用前景,對其研究已經成為目前研究的前沿,為新型直線傳動裝置帶來了新的思路。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
