帶非線性觀測器的船舶路徑跟蹤預測控制
2021-11-17 12:04:46李宗宣卜仁祥于鎵銘
計算機仿真 2021年9期
李宗宣,卜仁祥,于鎵銘
(大連海事大學航海學院,遼寧 大連 116026)
1 引言
欠驅動船舶路徑跟蹤是典型的運動控制問題,其主要目的是在不考慮時間限制的情況下,使船跟蹤上參考路徑[1]。對此,為簡化路徑跟蹤控制的復雜性,Fossen提出一種line-of-sight(LOS)視覺制導方法,將三維位置控制簡化為一維艏向控制[2]。但由于路徑跟蹤存在舵幅與舵速受約束、舵角需優化、模型不確定以及外界干擾等問題,因此對其控制仍具有一定難度。
文獻[3]為解決外界干擾和內部模型不確定,設計出基于PID的自抗擾控制器(ADRC)。文獻[4]將ADRC與滑模控制相結合,對內部未知項和外界干擾具有良好的抑制作用。文獻[5]利用ADRC的核心成分,即擴張狀態觀測器對外界干擾進行了估計。文獻[6]設計出非線性自適應控制器,以應對模型中的未知部分。文獻[7]同樣利用自適應方法設計自動舵,主要解決波浪干擾問題。文獻[8]利用徑向基函數神經網絡(RBF)技術,對模型未知參數進行逼近。 此外,文獻[9] 提出RBF和神經網絡觀測器,對未知項和船舶速度均進行估計。文獻[10]提出一種比RBF更簡便的最小學習參數技術(MLP),以減小對未知項逼近的計算量。文獻[11]利用干擾觀測器,對外界干擾進行估計。文獻[12]提出增量反饋滑模控制,避免了外界干擾和未知參數的影響。除了解決模型未知項和干擾問題,對控制輸入的約束問題也是不能忽視的,否則所設計的控制律將不能理想地使系統穩定,甚至適得其反。考慮于此,文獻[11]在控制律中加入輔助系統,以避免輸入限制問題。 文獻[13]通過在迭代滑模中引入具有極值限制性的非線性雙曲正切函數,約束了最終的控制輸入范圍。當今人們不僅要求輸入的幅值大小受限制,而且希望獲得具有變化小并光滑的更優控制輸入,以減小能量損耗。則與以上方案相比,模型預測控制(MPC)在處理約束和優化問題上別具一格,更為有效[14], 文獻[15]提出線性MPC和非線性MPC, 并通過對比仿真,驗證了兩種控制器解決輸入約束的有效性。文獻[16]為解決軌跡跟蹤中的控制輸入及控制增量約束問題,設計線性MPC控制器,其簡單但也對較大的外界干擾過于敏感。 大多數MPC需要基于與實際船舶模型相符的預測模型,來進行預測未來狀態的。而實際中,精確的預測模型是很難獲得的,這增加了難度。
參考以上文獻,對于模型未知項和外界干擾的解決方案已有諸多成果,而對輸入約束和優化的考慮較少[3-5]。有鑒于此,本文利用MPC處理舵角優化、舵幅與舵速約束問題。將與實際船模更為相符的分離型模型(MMG)作為預測模型,而且利用非線性觀測器對預測模型中的總未知項進行反饋補償,以處理MPC預測模型與實際模型之間存在偏差的問題[15-16]。最終對比仿真結果驗證了所提控制算法的有效性。
2 船舶模型和控制目標
2.1 MMG模型
船舶位置與其相應的運動參數如圖1。
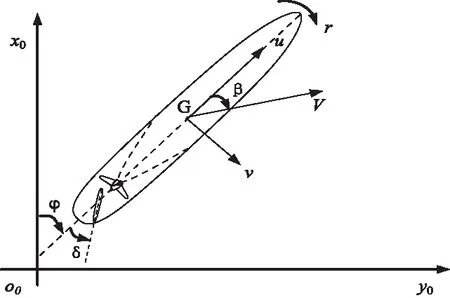
圖1 船舶平面位置與運動參數
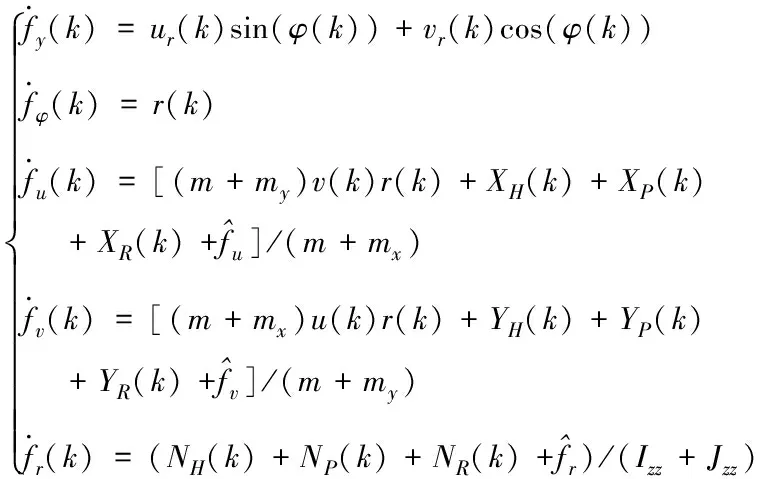
其中,φ是艏向角;u是對地縱向速度,v是對地橫向速度,r是轉艏角速度,V=(u2+v2)1/2是對地合速度,β=arctan(v/u) 是漂角,δ是舵角。考慮風浪流干擾的船舶MMG模型可表示為[12]
(1)
式中,m是船舶質量,mx和my是附加質量,XH、YH和NH是裸船體力(矩),XP、YP和NP是螺旋槳力(矩),φc和Vc分別是流的流向和流速,XW、YW和NW是風力(矩),XWave、YWave和NWave是浪力(矩),Izz是船舶繞豎直軸的慣性矩,Jzz是附加慣性矩,XR、YR和NR是舵力(矩),其計算如下
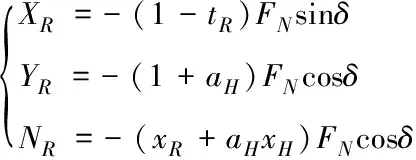
(2)
式中,tR是舵阻力減額份數,αH是操舵引起的船體附加橫向力與舵橫向力的比值,xH是操舵誘導船體橫向力作用中心到船舶重心的距離,FN是舵正壓力
2.2 控制目標與假設條件
由于路徑跟蹤不需要考慮縱向位移,只需將橫向位移y鎮定為0,便可使船跟蹤上路徑。因此,本文控制目標是給定螺旋槳轉速,設計合適的舵角使船跟蹤上設計的路徑,即滿足橫向位移偏差ye=0。在設計控制器過程中,所需要的假設條件如下:
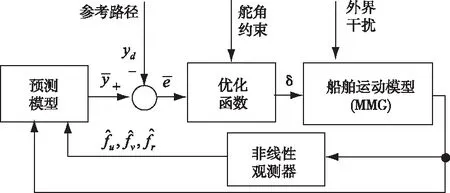
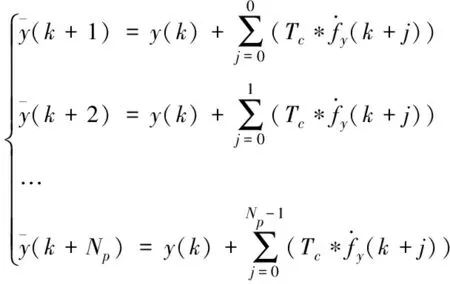
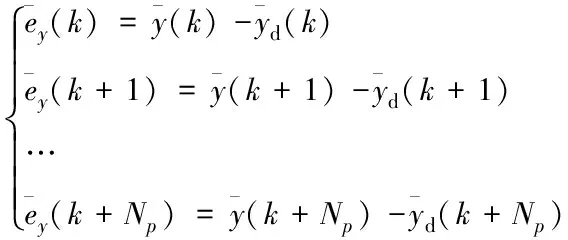
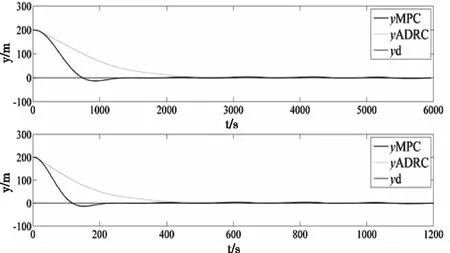
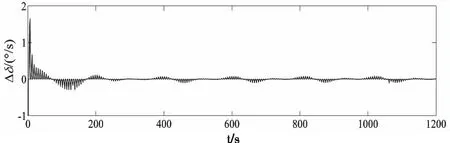
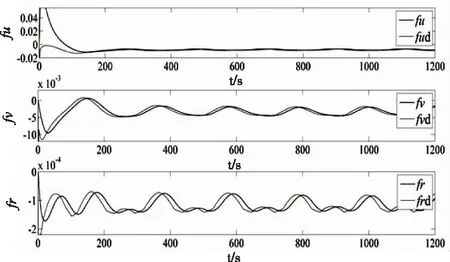
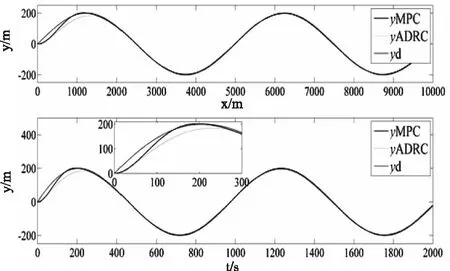
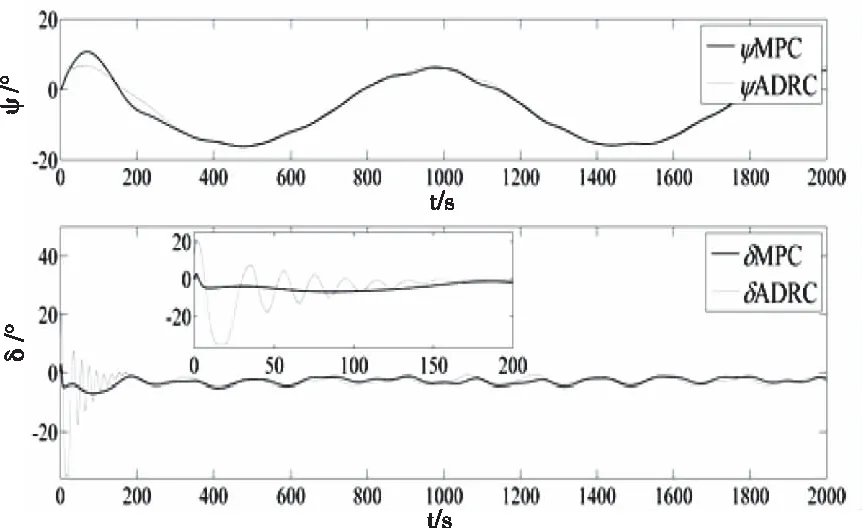
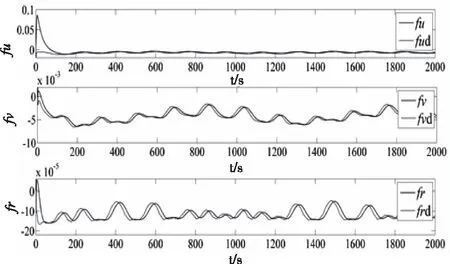
Ⅰ.包含模型不確定項和外界干擾不確定項的總未知項f有界,即|f| Ⅱ.總未知項f的一階導數有界,且和u、v、r相比都較小。 其中,Ⅰ是系統可控的必要條件。Ⅱ由于海洋環境的變化非突變,因此環境干擾變化速度和船舶運動速度相比較小。 本文將MPC作為路徑控制器,利用非線性觀測器對預測模型中的總未知項f進行逼近和補償。控制結構如圖2。 圖2 控制結構圖 本節以MMG模型作為預測模型,設計MPC路徑跟蹤控制器。首先基于歐拉迭代法對船舶未來狀態進行離散和預測[17] (3) (4) (5) (6) 利用當前時刻和未來時刻的路徑偏差設計優化函數,并為對舵角進行優化,將其也置于優化函數中,如下 (7) 式中,Q和P均為權重,以調節路徑性能和舵角性能之間的平衡關系,Δδ為舵速,Nc為控制時域,且Nc 本節設計非線性觀測器,對預測模型中的總未知項fu、fv和fr進行逼近。先以fu為例設計觀測器,如下 (8) (9) 式中,η是正系數。對V2求導如下: 根據假設條件Ⅱ,g3可以忽略不計。由于雙曲正切函數和線性比例函數相比受到極值限制,因此選擇合適的正參數ku1>ku2可以使g2和(-u)異號,即當(-u)<0時g2大于0,此時,式(8)中的第2項將大于0,則u將會增加至u>fu,從而g1和g2都將大于零,則有而當0<(-u)時g2會小于0,式(8)中的第2項也小于0,則u將會減小至u 為驗證所提MPC算法的有效性,將本文MPC控制器與文獻[4]所提的ADRC方法做對比仿真。仿真對象為原大連海事大學育龍號實習船,其舵角δ約束值為35°,舵速Δδ約束值為3-6°/s。式(1)中的風浪干擾力矩計算如下: 風力XW、YW和NW計算如下[19] (11) 式中,ρα是空氣密度,αR是相對風向角,UR是相對風速,Af和As分別是水線以上的正投影面積和側投影面積,Loα是船舶總長,Cwx(αR)、Cwy(αR)和Cwn(αR)分別是風壓力系數。 由于大型萬噸級船舶本身可抵消一階高頻波浪影響,故在此僅考慮二階浪力XWave、YWave和NWave,如下[20] (12) 式中,λ是浪波長,χ是波浪遭遇角,ρ是海水密度,α是波幅,CXw(λ)、CYw(λ)和CNw(λ)分別是波浪漂移力(矩)系數。 1)直線路徑: 初始位置(x0,y0)=(0,200m), 參考路徑yd=0.外界干擾:風速10m/s,風向20°sin(0.035t)+45°,流速1m/s,流向10°sin(0.005t)+45°, 浪波長83m,波浪遭遇角 φ+135°-20°sin(0.03t)。 圖3和4中,yMPC、yADRC、φMPC、φADRC、δMPC和δADRC分別為基于 MPC 和ADRC的路徑、艏向和舵角仿真結果。圖4中,在時變干擾下,兩個控制器均能使船準確的跟蹤上參考路徑。yMPC跟蹤速度快,卻也產生了超調,但超調量不到7%,這在實際航行要求之內。圖4中,由于時變風浪流干擾的影響,艏向角和舵角都有一定的波動,以抵抗干擾。δMPC不到10°, 而δADRC則達到了滿舵值35°,并且δMPC初始振蕩幅值和頻率都比較小,更為光滑,這說明了所提MPC控制器解決舵幅約束和優化問題的能力。圖5可以看出舵速Δδ一直被限制在2°/s。圖6描述了所設計的非線性觀測器對三個總未知項的逼近能力。 圖3 直線路徑跟蹤 圖4 艏向和舵角 圖5 舵速 圖6 總未知項 2)曲線路徑初始狀態:(x0,y0)=(0,0).參考路徑:yd=200sin(0.0004πx).干擾除流向相反外,其它參數不變。 圖7中,兩控制器均能使船穩定地跟蹤上曲線路徑,說明兩控制器都可有效地解決模型不確定和外界干擾問題,而yMPC跟蹤速度更快。圖8中,不僅因為時變干擾,而且由于曲線跟蹤本身就需要船舶一直轉向打舵,因此艏向角和舵角的變化比直線跟蹤較為劇烈。但可以明顯的看出δMPC比δADRC變化幅度小,初始振蕩時間更短,舵角更光滑。圖9和圖6一樣,驗證了非線性觀測器估計總未知項的能力。 圖7 曲線路徑 圖8 艏向角和舵角 圖9 總未知項 為解決船舶路徑跟蹤中存在的舵幅與舵速受約束、舵角需優化、模型不確定以及外界干擾等問題,設計MPC控制器,并將舵角置于優化性能指標函數中。將MMG模型作為預測模型,并利用非線性觀測器對模型不確定項和外界干擾進行逼近。最后,仿真說明,所設計的MPC控制器使船在風浪流時變干擾下仍能準確地跟蹤上參考路徑。舵幅和舵速均在限制值內,舵角變化小且初始振蕩時間短,更為光滑,這些結果驗證了所提控制算法的有效性。3 路徑跟蹤控制器
3.1 MPC控制器
3.2 非線性觀測器
4 仿真分析
4.1 仿真數據


4.2 仿真結果

5 總結
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38艦船科學技術(2022年14期)2022-09-22 03:07:40船舶(2021年4期)2021-09-07 17:32:22中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22藝術啟蒙(2018年7期)2018-08-23 09:14:18海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16光學精密工程(2016年6期)2016-11-07 09:07:19