高靈敏度感應式磁傳感器測量誤差校正算法
2021-11-17 07:10:44張士榮
計算機仿真 2021年2期
張士榮,郭 強
(1. 江蘇理工學院,江蘇 常州 213001;2. 南京理工大學,江蘇 南京 210094)
1 引言
電磁波探測技術是一種發展成熟的地質勘測方式,現階段,相關企業與研究人員開發出一系列相關產品,例如大地電磁測深儀、瞬變電磁儀等[1]。低頻電磁波能應用在地質測量、地殼通信、磁場勘測和地球物理觀測等領域。傳統勘測通常運用鋪設線圈方法接收信號,但因受到地理空間約束,鋪設大量線圈給測量工作帶來極大不便[2-3]。高靈敏度感應式磁傳感器能有效解決上述問題,在縮短體積的同時完成相等甚至更高的精準度,在電磁波應用中擁有舉足輕重的地位。
考慮到不同環境下由于工藝及安全水準等原因,高靈敏度感應式磁傳感器有時會產生偏移誤差。徐祥[4]等人提出基于自適應參數估計的磁傳感器實時校正算法,對參數進行實時估計和處理,構建基于模值的參數估計方程,分析參數模型噪聲特性,針對非高斯狀態相關噪聲提出采用自適應參數估計方法,完成磁傳感器誤差的校正。但該算法對測量誤差因素考慮較少,難以保證校正結果的可靠性;王鵬飛[5]等人設計了基于誤差分離的矢量校準算法,用于感應式磁傳感器正交性校正。構建正交性校正矢量校準數學模型,對校正過程中的安裝誤差采取誤差項分離校正,融合卡爾曼濾波與最小二乘法求解模型參數,獲得正交性校正矩陣。但該算法的計算耗時較長,證明其實時性較差。
針對傳統方法存在的不足,本文建立一種基于改進遺傳算法的測量誤差校正算法。首先詳細分析高靈敏度感應式磁傳感器工作機理和靈敏度影響元素,分類測量誤差來源,創建磁傳感器誤差模型,運用自適應方法完善遺傳算法內的交叉算子和變異算子,實現高精度測量誤差校正目標。
2 高靈敏度感應式磁傳感器靈敏度分析
在感應式磁傳感器內起到關鍵作用的是線圈與磁芯,繞制的線圈用于感應穿過其內部磁通量的變化,從而生成感應電動勢。通過引入高磁導率的磁芯,能把信號增強若干倍。磁傳感器外磁場發生改變時,線圈軸線和磁場平行方向獲得的感應電壓為
(1)
其中,S是繞制線圈的有效面積,B表示外磁場的磁感應強度,負號是感應電壓方向。如果變化的外磁場是正弦信號,則存在
B=B0sinωt
(2)
設定后級放大器的放大倍數是A,線圈匝數是n,磁芯有效導磁率是μa,繞制線圈有效面積計算公式描述為
S=ns0μaA
(3)
磁傳感器感應電動勢絕對值為
|E|=|2πens0μaAB0cosωt|
(4)
通過式(4)可以看出,感應電壓和信號頻率e、線圈匝數n、骨架橫截面積s0、導磁率μa成正比,測量誤差校正可從這幾個參數入手。
電磁波在大地電磁勘測中傳播時,會有很多損耗,且低頻干擾信號強[6]。針對低頻弱信號,怎樣增強靈敏度是傳感器設計的重點。
倘若磁場信號是正弦波信號,傳感器附帶有增益是前置放大器,感應線圈靈敏度是線圈在單位磁感應強度改變中所呈現的感應電動勢,則可將靈敏度運算公式描述成
(5)
通過式(5)可知,在相同頻率情況下,靈敏度和S成正比。因此,提高有效面積是增強靈敏度的可靠路徑。針對骨架固定傳感器,有效導磁率取決于磁芯材料與長徑比,將有效導磁率記作
(6)
其中

(7)
(8)
其中,μr表示相對磁導率,Nd是退磁因子,L是磁芯長度,d是磁芯直徑。
3 測量誤差模型構建



(9)
式中
C=CsCηCα
(10)


(11)

(12)
理論狀況下,感應式磁傳感器三個向量在不同狀態下的值會在原點組成一個球心,半徑是測量區域地磁場標量值的某個球面。
針對測量值大小,根據式(12)中可知,不同狀態下的全部測量值都被收斂在一個橢球面內[8]。而硬鐵誤差劃定了橢球中間方位,軟鐵誤差與標度系數誤差可以改變橢球長短軸及扁率,而橢球長軸指向則取決于裝配弧度誤差與軟鐵誤差。
讓Γ值滿足下列約束:
(13)
結合式(12)可得到N組測量方程的線性模式
(14)
由于式(14)內H具有噪聲,使用總體最小二乘法對ξ進行估計[9],得到
(15)

(16)
4 改進遺傳算法下的測量誤差校正
從高靈敏度感應式磁傳感器原理分析中可知,需要優化的參數個數很多,很難尋找到最優值,需要引用全新的計算方式。因此,本文采用遺傳算法實現參數最優處理。
遺傳算法是一種擬照大自然生物演化過程的高隨機性搜尋手段,目標函數無需連貫,計算簡便,具備很強的魯棒性,在組合優化、模式識別等領域得到充分運用[10]。融合感應式磁傳感器校正參數求解,完成改進遺傳算法設計,將其代入測量誤差模型內,實現高精度測量目標。
設定一個誤差函數f
f=min[max(|Bj|-|Bs|)]

(17)
其中,f為包含信號頻率e、線圈匝數n、骨架橫截面積s0、導磁率μa的函數,|Bs|為設定的外界標準磁場模值,|Bj|為感應式磁傳感器在姿態j下測量修正值的模。
測量誤差校正的目標是探尋式(17)中的最小值,在遺傳算法內個體函數值越低適應度越高。把式(17)當作適應度函數,把e、n、s0和μa引入適應度函數,函數值越低,個體適應度越高,存活概率越高。
基于此,擇優處理使用交叉、變異及選擇等有關算子。選擇算子是遺傳算法的典型算子之一,該算子從上一代種群內剔除適應度小的個體,盡可能保留適應度高個體,組成若干能夠繁衍后代的子群體,實現模擬自然界優勝劣汰機制目標。
交叉算子能有效獲得新一代的個體形式,新個體具備父輩個體優良特征,可達到算法全局搜尋目標。但在實際操作中,若交叉概率過高,會破壞群體內的良好模式,倘若交叉概率值過低,新個體生成的速率會變得緩慢,因此要嚴格控制交叉算子取值。
在傳統遺傳算法計算過程中,交叉概率一般任意選擇一個很高的值,而變異概率通常情況下會很低。交叉概率Pc取值范圍在0.25~0.88之間,變異概率Pm取值范圍是0.01~0.15,具有很強的盲目性。
在明確遺傳算法內關于交叉算子與變異算子擇取盲目性前提下,使用改進遺傳算法完成誤差校正任務[11]。運算根本思路為:利用自適應變化的交叉概率與變異概率替代原有概率,讓兩個概率伴隨種群進化進行對應改變,完善后的方法能優化全局搜尋能力與收斂效率,同時在搜尋流程后期方法收斂穩定性依舊很好。
從種群內獨立個體角度出發,交叉概率值高低應該和個體適應度值擁有密切關系;從種群全局進化流程角度,伴隨進化流程不斷深入,交叉概率要慢慢減少,直至最后變成一個平穩值,防止對算法后續穩定性造成不良影響,讓整個算法無法收斂或收斂速度慢。從生成全新個體方面考慮,種群全部個體在交叉運作中要擁有相同地位,令遺傳算法無論處于搜尋空間的每個方位均具備勻稱性。
在真實操作中,如果要獲得滿足以上各個需求的交叉算子難度很高,創建僅和進化代數有關,和個體適應度無關聯的交叉概率運算方法,具體計算過程為
(18)
其中,Pc,tmp表示交叉概率中間參變量,Pc,max是設定的最大交叉概率,Pc,min是設定的最小交叉概率,Gmax代表最高進化代數,g是目前進化代數,0≤g≤Gmax,Pc,g是目前種群交叉概率。
比較理想的變異概率應當隨著個體優劣不斷改變,也就是劣質個體的變異概率變大[12],為優良個體賦予較低的變異概率。本文使用式(19)推導個體適應度的自適應變異概率

(19)
其中,Pm,tmp表示變異概率中間參變量,Pm,max是設定的最高變異概率,Pm,min是設定的最低變異概率,Fmax是個體的最佳適應度值,Fmean是個體適應度均值,F(μ)是等待變異適應度值,Pm(g)是現階段種群個體變異概率。
最后把式(18)與式(19)分別代入式(17)中的誤差函數,求解出準確的測量誤差校正參數,提升高靈敏度感應式磁傳感器的測量精度。
5 實驗與分析
為驗證上述高靈敏度感應式磁傳感器測量誤差校正算法的有效性,分別通過數值仿真和實測數據對感應式磁傳感器測量誤差校正算法的性能展開分析。其中,數值仿真用于明確算法參數估計的正確性,實測數據仿真用于證明算法真實有效性。
考慮到隨機測量噪聲影響,對算法實施Monte Carlo仿真,表1為應用本文算法實施參數估計的平均結果。
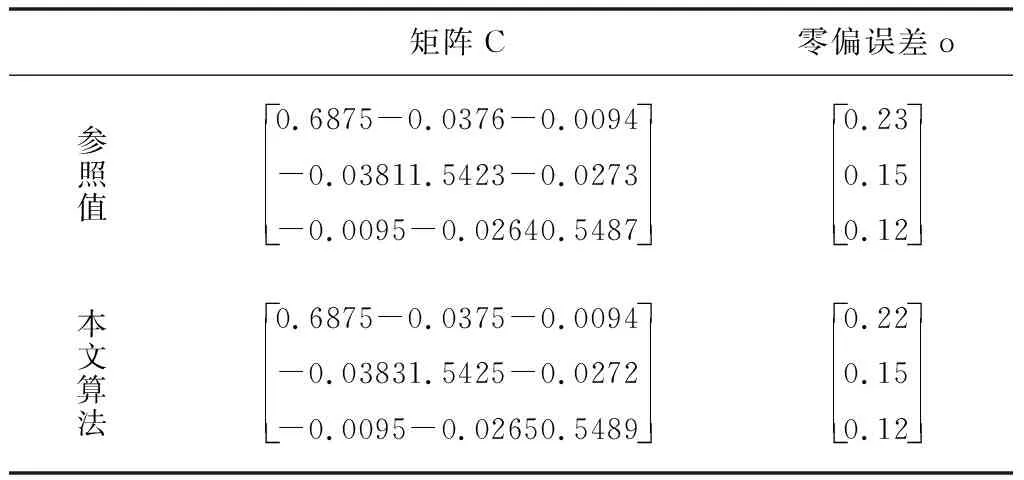
表1 模型參數設定
從表1中可知,本文算法可以準確估計出參數{C,o},所得結果和參照值比較接近。
圖1為校正前后的測量重力場模值。從圖1中可知,在各種誤差綜合影響下,未校正數據展現出較大起伏的波動,而本文算法校正后的測量模值都處于參照重力場模值周邊范圍。其原因在于本文算法使用改進遺傳算法,準確求解校正參數,有效增強所提方法整體校正精度。
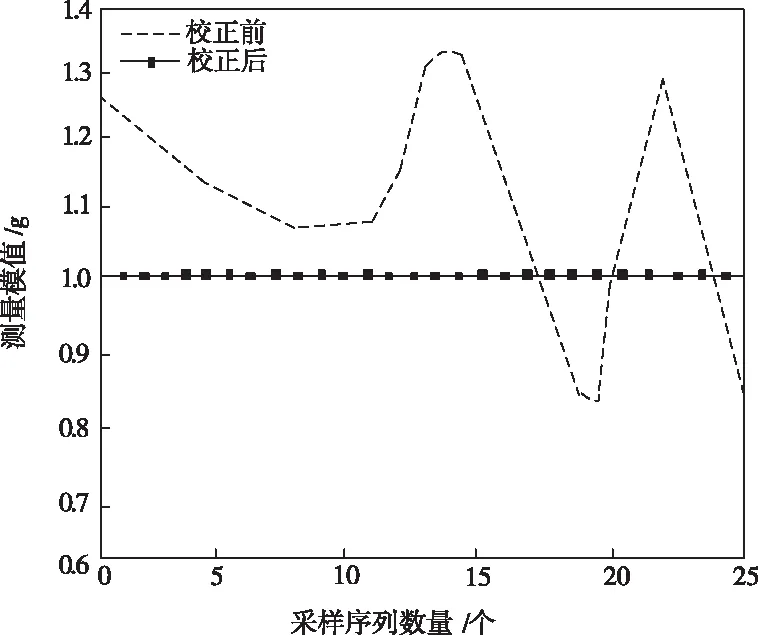
圖1 校正前后重力場模值和參照模值仿真結果對比
為深入探究本文算法有效性,使用感應式數字加速度計進行實測驗證。測量數據利用微控制器從傳感器讀取,采樣頻率是150Hz,微控制器利用串行接口協議把數據轉發至上位機完成數據收集。把加速度計靜置15s時間,并求出其測量均值,得到不同姿態狀況下150組重力加速度測量數據。然后使用本文算法實施測量誤差校正,校正結果如圖2所示。
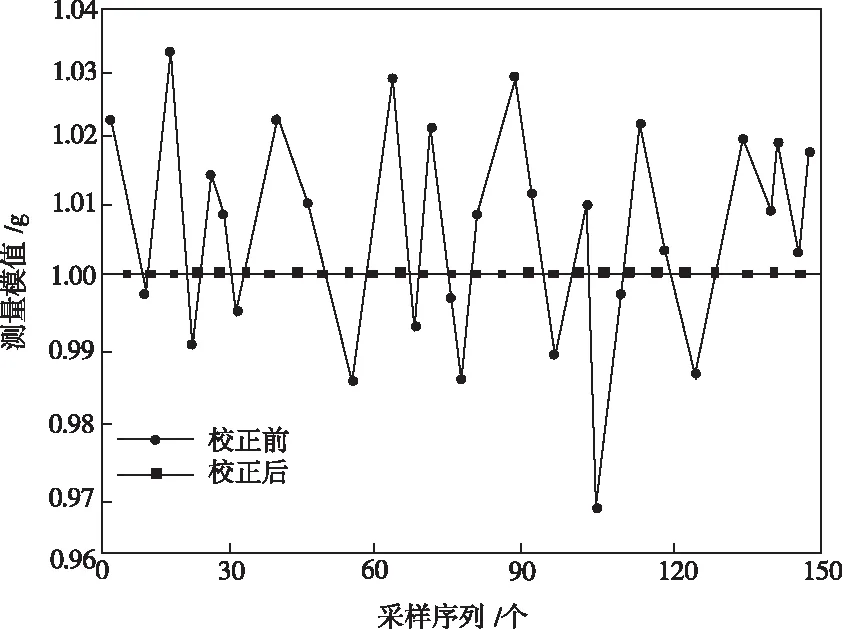
圖2 校正前后重力場模值和參照模值實測結果對比
根據圖2可以看出,校正前的加速度數據模值上下起伏比較劇烈,而本文算法校正后的加速度數據模值和參照重力場模值相差較小。證明應用本文算法后,獲得的測量誤差校正參數合理、有效。
6 結語
面向不同環境因素下導致的磁傳感器測量誤差問題,本研究提出一種基于改進遺傳算法的測量誤差校正算法。該算法具有優秀的校正精度、魯棒性強、操作簡便的優勢,能夠為大地電磁測深勘探領域提供更加可靠的數據資源。但在改進遺傳算法步驟中,沒有考慮選擇算子染色體變化規律在校正求解中的應用,今后會對這一方面加以跟進。
