某轎車側風作用下的氣動特性分析與改進研究
2021-11-17 03:12:24陸潤明廖抒華覃紫瑩
計算機仿真 2021年3期
陸潤明,廖抒華,覃紫瑩
(廣西科技大學機械與交通工程學院,廣西柳州 545006)
1 引言
在汽車實際行駛中,氣流是不會總是與汽車的縱對稱面平行的,當氣流與汽車存在橫偏角時,汽車都會產生氣動側力[1]。汽車在有側風的環境下行駛,會受到側向力、側傾力矩和橫擺力矩的作用,其行駛穩定性就會受到影響,會威脅到汽車的行駛安全。在如今,汽車追求低能耗的大背景下,汽車輕量化作為降低能耗的重要手段,但汽車輕量化的同時,會使得汽車的側風穩定性變差,高速行駛時會使潛在的危險性加劇。所以,在新車型開發中,應重視汽車的側風穩定性的研究,降低汽車的側風敏感度,以提高行駛穩定性。
近年來,很多學者在如何提高汽車側向氣動性能上做了研究。如王夫亮等[2]采用穩態方法和動態方法對側風作用下的汽車外流場進行了3種情況的數值模擬,將3種模擬結果進行對比,同時將部分模擬結果與試驗值進行了對比;王露等[3]運用CarSim仿真軟件構建特定道路模型和側風模型,系統地模擬了側風作用下山區高速公路行車穩定性;張英朝等[4]采用橫擺模型法對不同側風下的賽車氣動特性進行了CFD仿真和試驗研究,并對不同側風下流場中速度以及壓力的分布進行了分析,探究了氣動力系數和尾部流場的差異;楊彬[5]對階背式MIRA模型在自然側風下的風阻、壓力場、外流場等表現進行了數值模擬仿真研究。在汽車受側風影響這個方向上的研究,對汽車行駛中側向風帶來的影響研究居多,對汽車側向氣動性能優化的偏少。
本文以某轎車為研究對象,采用與實際行駛情況接近的移動地面穩態模擬方法[2],分析了在不同強度側風下轎車影響車身周圍流場的變化。運用網格自適應方法、試驗設計、近似模型等技術方法,探討車身兩側表面結構參數對轎車的側向氣動性能的影響,并在此基礎上,優化車身兩側的結構參數,以提高轎車側向氣動性能。
2 計算模型搭建與邊界條件
2.1 建立仿真模型
在車型開發初期,主要考慮車身周圍的流場特性,且不考慮汽車內流場的影響,所以對模型的表面特征進行簡化。幾何處理如下:去除車身最外層表面以外的特征、封閉進氣格柵、封閉輪胎且車身底面用平面覆蓋,處理后的幾何表面如圖1所示。

圖1 處理后的幾何表面
研究表明,只有阻塞比低于1%的風洞實驗結果,阻塞干擾產生的誤差才能被忽略[6],計算如(1)式

(1)
式中,ε為阻塞比,A為汽車正投影面積,AN為虛擬風洞入口面積。
本次仿真中,建立高為10m,寬20m,長50m的虛擬風洞,如圖2所示。模型正投影面積A:1.951389m2,虛擬風洞入口面積AN:200m2,所以ε=0.98%<1%,滿足阻塞比的要求。
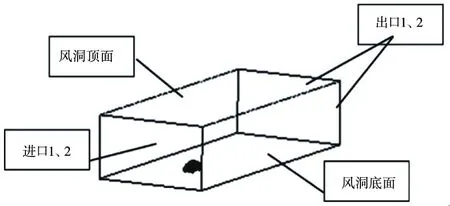
圖2 虛擬風洞示意圖
為更好地捕捉車身周圍的流場現象,在車身周圍設置多個局部網格加密區,以提高車身周圍的計算精度,設置邊界層網格并生成體網格,建立完成的仿真模型如圖3所示。
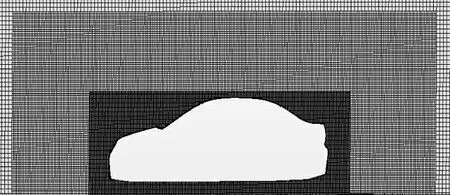
圖3 對稱面網格截圖
2.2 物理模型的選擇
物理模型的選擇決定于虛擬風洞的氣流流動狀態,氣流流動狀態主要有兩種形式,即層流和湍流。流動狀態的可以由雷諾數的大小得出,計算如(2)式

(2)
當Re?2300,可知其流動狀態屬于高雷諾數湍流狀態。高雷諾數湍流模型一般有以下幾種:標準k-epsilon模型、RNG k-epsilon模型和Realisable k-epsilon模型。而Realisable k-epsilon模型相對于標準k-epsilon模型和RNG k-epsilon模型,其滿足對雷諾應力的約束條件,因此可以在雷諾應力上保持與真實湍流一致。同時文獻[7]對轎車外流場CFD分析中常用k-ε湍流模型做了對比分析和實驗驗證,證明了Realisable k-epsilon模型更適合轎車的氣動性能分析。本文選用Realisable k-epsilon湍流模型,其流動方程表達如下:
湍動能k方程
+Pb-ρε-YM+Sk
(3)
耗散率ε方程

(4)

2.3 近壁面處理
在臨近壁面的區域,在壁面的法線方向上速度存在很大的梯度,在很小的距離內速度的變化很大。為保證更準確地模擬在近壁面的流動,需要在黏性底層布置較多的節點,邊界層網格質量可通過控制y+值得范圍來實現,對于高雷諾數模型,y+≈30,進而得出確定邊界層網格與壁面的最小距離y,y由以下(5)-(9)式得出
(5)
(6)
(7)
(8)

(9)
式中,Re—雷諾數,ρ—空氣密度,v—氣流平均速度,l—特征長度,μ—動力黏性系數,Cf—壁面摩擦系數,τw—壁面切應力,uτ—壁面摩擦速度。
在本次仿真中,空氣密度1.18415kg · m-3,氣流平均速度120km·h-1,特征長度2.55m,動力黏性系數1.85508×10-5k g ·(m · s-1),y+取30。代入數據至(5)-(9)式,邊界層中首層網格厚度為3.7×10-4m,所以設置首層網格厚度為0.37mm。
2.4 邊界條件的設定
汽車行駛時周邊氣體流速不高,壓強變化小,所以在研究汽車外部氣流流動時,可以忽略壓縮性的影響[1]。其控制方程如下:
連續方程(質量守恒方程)
(10)
式中:ρ氣體密度,ui為i方向的速度分量
動量守恒方程

(11)
式中:P是靜壓力,τij是應力矢量,ρgi是i方向的重力分量,Fi是由阻力和能源引起的其它能源項。
氣體狀態方程
PV=ρRT
(12)
式中,P—氣體壓強,V—氣體體積,ρ—氣體密度,R—氣體常數,T—氣體熱力學溫度。
邊界條件設置如表1所示。

表1 仿真分析邊界條件
仿真模擬試驗設置車輛行駛速度恒定為120km/h,橫擺角分別為:0°、5°、10°、15°、20°,速度加載的方式為車輛行駛速度與側向風速的合速度,橫擺角、車輛行駛速度、側向風速、合速度的關系如表2所示,在仿真模擬中的合速度加載方式[8,9]如圖4所示。
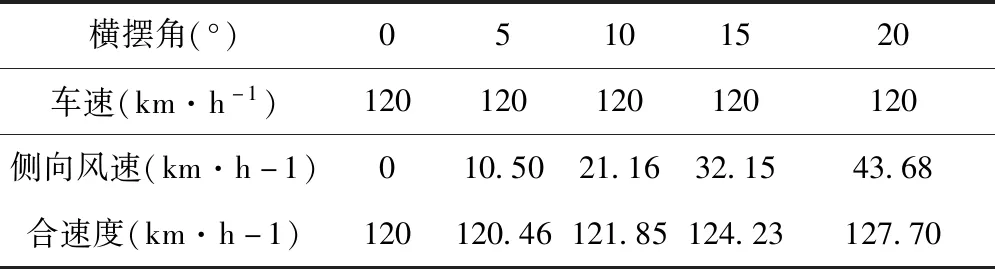
表2 橫擺角、車速、側向風速、合速度的關系

圖4 側風加載方向示意圖
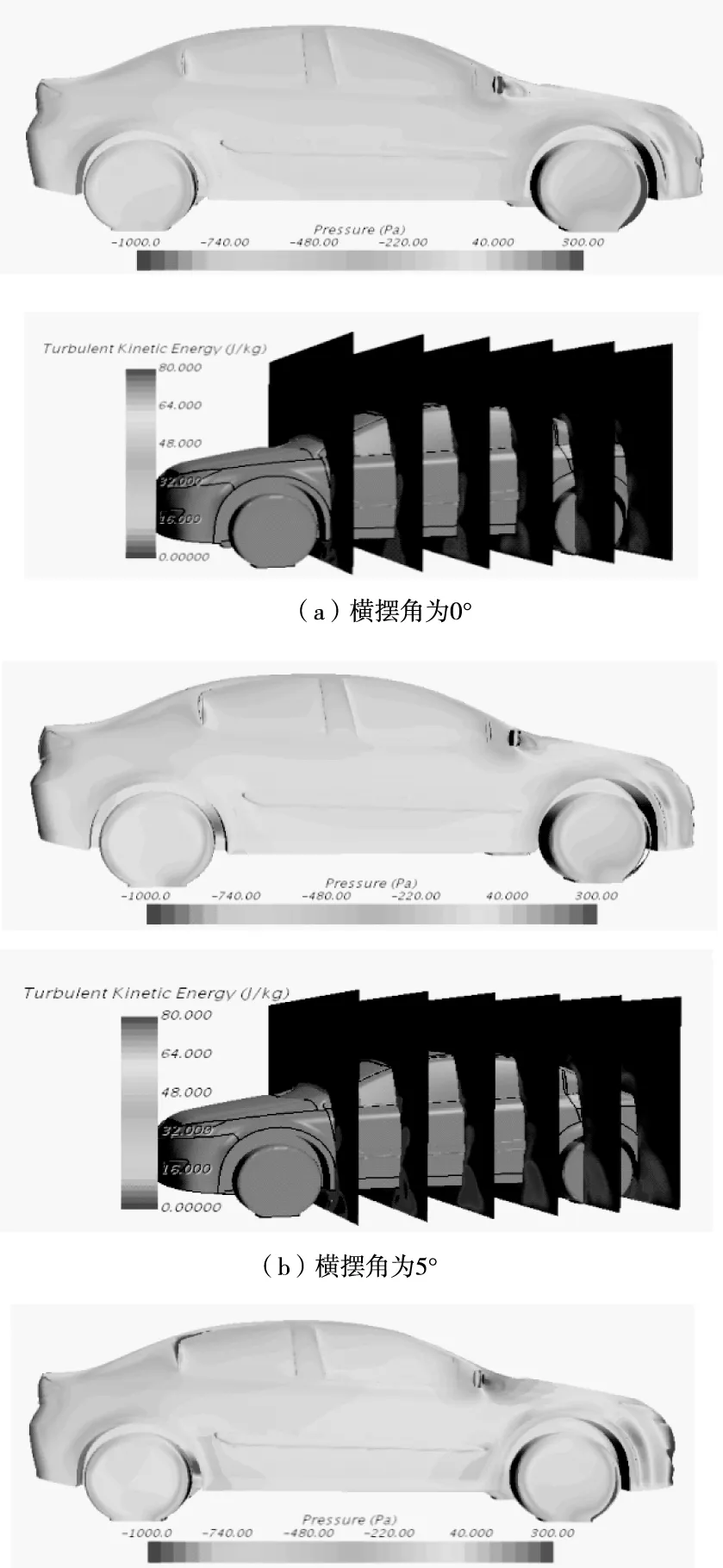
圖5 各橫擺角下車身表面壓力分布及車身兩側流場湍流動能圖
3 不同強度側風下汽車外流場分析
由圖5可以看出,隨著橫擺角的增大,車身迎風側表面壓力也越來越大,在車身背風側面的湍流動能也越來越大,亦即在車身背風側的能量損失越來越大。這樣在車身迎風側表面壓力增大,車身背風側面的壓力減小,導致車身兩側面的壓差隨著橫擺角的增大而增大,且由車身表面壓力分布可以看出,隨著橫擺角的增大,壓力值也在逐漸變大同時,風壓中心逐漸往車頭方向移動。

圖6 橫擺角與氣動側力系數關系圖
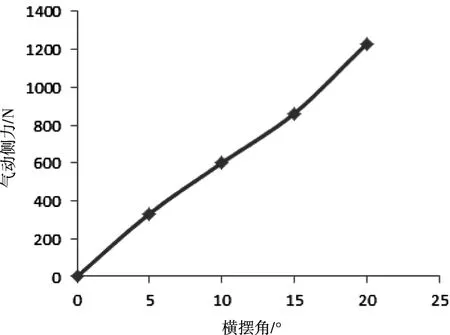
圖7 橫擺角與氣動側力關系圖
由圖6、圖7可以看出,當橫擺角越大,氣動側力系數就越大,氣動側力也越大,且近乎線性增大,當橫擺角為20°時,氣動側力系數為0.847,氣動側力為1231N,約為整車重量的9%。
當汽車受到側力影響時,汽車本身并不能產生力一個平衡力,只能靠駕駛員通過方向盤修正保持方向,但這樣會加重駕駛員的疲勞感和影響汽車的行駛穩定性,威脅行車安全。通過優化汽車外形,降低汽車外形對側風的敏感度,從而降低側向力對行車的影響。
4 優化設計
4.1 試驗設計分析
使用試驗設計方法,可以有效地減少復雜系統仿真次數,提高優化分析效率,幫助辨識關鍵的試驗因子、確定最佳的參數組合、分析輸入參數與輸出參數之間的關系和趨勢、構建經驗公式和近似模型等[10]。本次試驗選用最優拉丁超立方法,此方法能夠使試驗點盡量地均勻地分布在設計空間,具有很好的空間填充性和均衡性。
4.2 參數變量設計
采用FFD(Free Form Deformation)參數化方法對變量實現網格自適應變形,該方法仿照彈性物體受外力后發生相應的變形這一物理現象,將研究對象置于控制體當中,給控制體施加外力,則控制體內的所有幾何發生相應變形,處于其中的研究對象形狀也即發生變化[11]。從文獻[12]可知,車身側面結構對車輛的側向氣動性能有很大的影響。本次優化只調整車身的橫向特征。通過對不同強度側風下汽車外流場的分析,結合氣流分離機理,在不影響車輛裝配要求、使用性能等的前提下,在車身兩側選擇的結構參數變量為:側窗傾角、側圍弧度和門檻弧度,各變量控制點變化如表3所示,在網格變形軟件sculptor中建立對應的參數化模型。本次試驗選用橫擺角為20°的側風條件下進行車身側面結構優化,以氣動側力系數為優化目標,在全局尋求各參數變量的最優組合,參數變量設計如表2所示。

表3 參數變量設計
4.3 試驗設計結果分析
由圖8主效應圖可知,側圍弧度對整車氣動側力系數的影響較大,且與氣動側力系數近乎呈線性關系。如圖9所示,根據線性回歸模型的系數大小判斷各變量對氣動側力系數的貢獻率,由圖可以看出,三個變量與氣動側力系數之間均呈正相關關系。由圖10各變量之間的交互效應圖可知,三個變量兩兩之間的交互作用不明顯,且有相同的趨勢,起相互促進的作用。
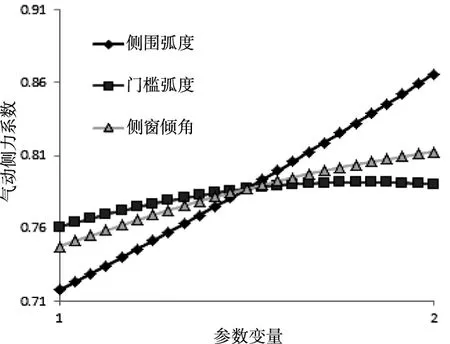
圖8 主效應圖
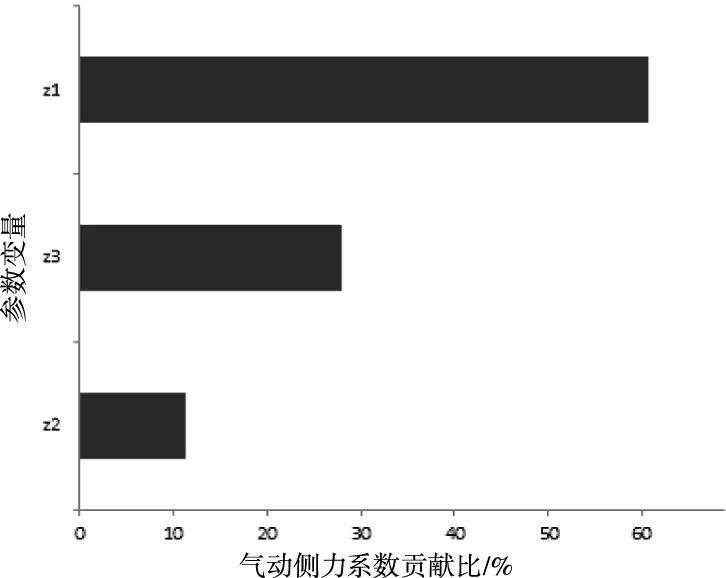
圖9 Pareto圖
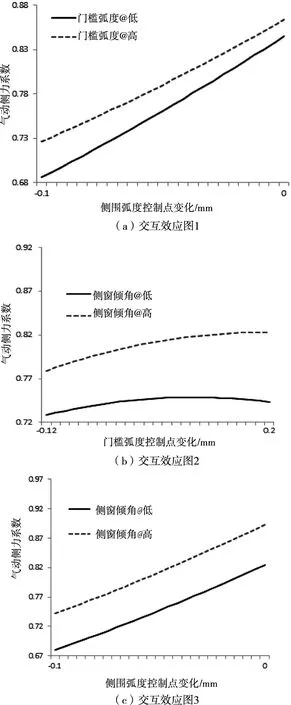
圖10 各變量之間的交互效應圖
4.4 近似模型可信度分析及選擇
近似模型方法(Approximation Models),通過構建逼近輸入變量和響應變量關系的數學模型,替代仿真軟件高昂的計算代價。這種方法加快了尋優速度,減小了計算量并縮短計算周期。常用的近似模型包括:響應面模型、神經網絡模型、Chebyshev正交多項式模型和Kriging模型。不同的近似模型有不同的特點和優勢,通過比較不同近似模型對樣本點的擬合精度,對各近似模型進行可信度分析,如圖11所示,是擬合精度的散點圖,橫坐標為近似模型預測值,縱坐標為仿真值,斜線是近似模型預測值與仿真值的等值線,由散點圖可知,Kriging模型的擬合精度最好,擬合精度系數R2為0.967,結合文獻[13]的實驗驗證,本次優化選用Kriging模型。
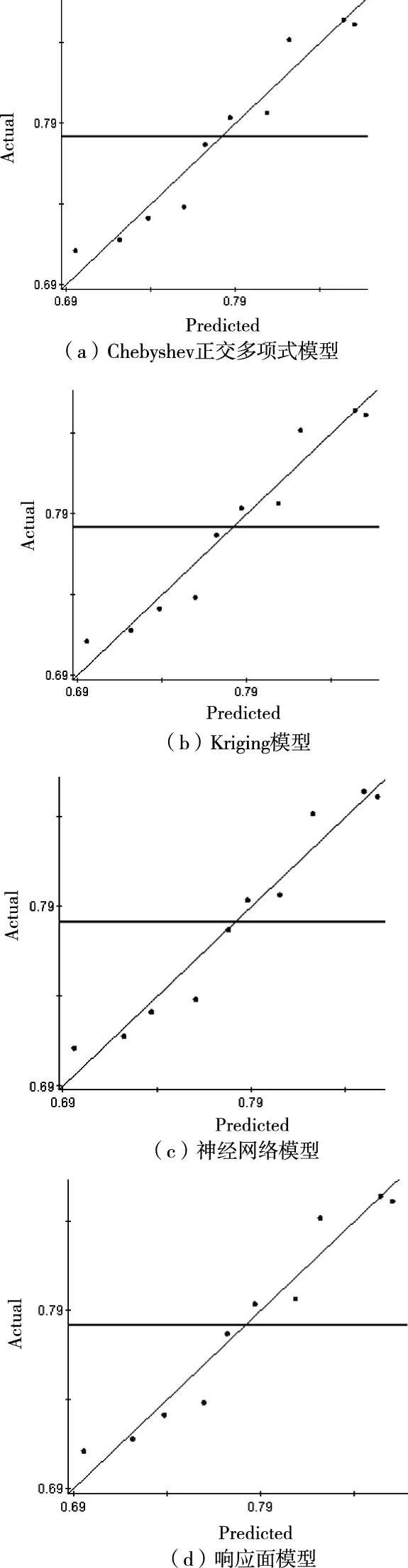
圖11 各近似模型擬合散點圖
4.5 優化方法
本次試驗選用多島遺傳算法(MIGA)在整個設計優化空間進行尋優。這種方法模仿生物進化的遺傳繁殖機制,對優化個體進行編碼,然后對編碼后的個體進行選擇、交叉、變異等遺傳操作,在優化過程中具有很好的魯棒性,故使用該方法在整個優化空間內進行自動尋優。
5 優化結果分析與仿真驗證
通過建立近似模型進行全局尋優,近似模型預測值與對應的控制點變化范圍如下:

表4 控制點變化與預測值
對近似模型的預測結果進行仿真驗證,結果如表5所示

表5 優化結果驗證
近似模型的預測值與仿真值之間誤差值為0.018,誤差較小,即氣動側力系數降低18.65%,對應的氣動側力值減小了230N,優化效果良好。優化前、后車身周圍流場對比如圖。
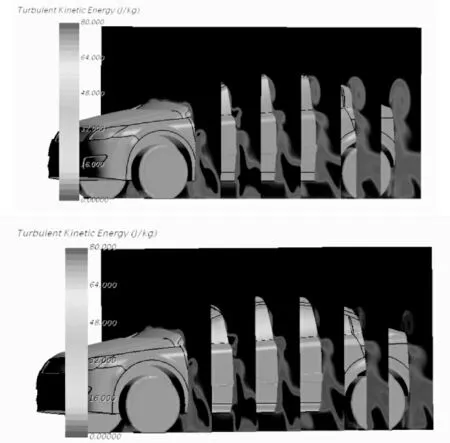
圖12 優化前、后車身兩側湍流動能圖
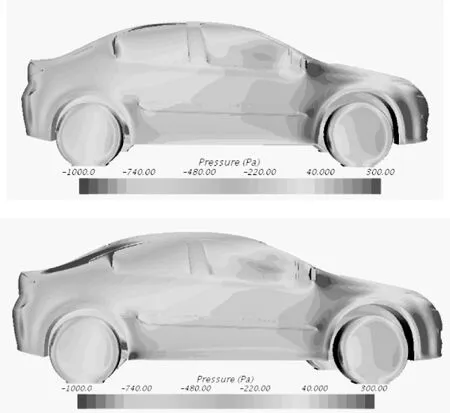
圖13 優化前、后車身迎風側表面壓力分布
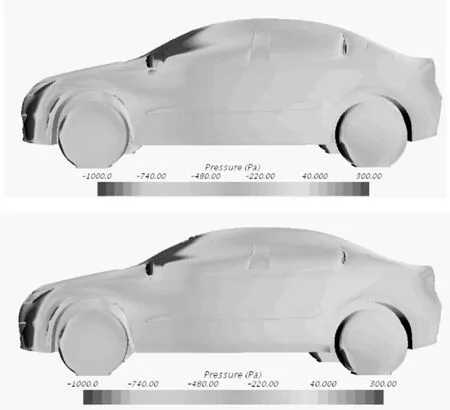
圖14 優化前、后車身背風側表面壓力分布
由圖12為優化前、后的湍流動能圖,由圖可見,優化后車身背風側的湍流動能明顯減小,故在車身背風側的氣流能量耗損降低,亦即車身兩側湍流情況有所改善。
由圖13、圖14可看出,優化后車身迎風面的壓力有所降低,背風側壓力升高,使得車身兩側區域壓力差減小,從而使車輛受到的側向力減小。根據計算可知,原始模型以120km·h-1的速度行駛時,遭遇右側43.68 km·h-1的側風影響時,受到的氣動側力為1231N,在相同環境條件下,優化后模型的氣動側力為1001N,優化后模型的氣動側力降低230N。
6 結束語
文章分析了在車輛以120km·h-1直線行駛,遭遇不同強度側風影響下的車輛外流場的變化,并在橫擺角為20°的側風條件下,探索車身兩側表面結構參數與車輛側向氣動性能的關系,進而優化車身側面結構參數,提高車輛的行駛穩定性。
研究結果表明:
1)在不同強度側風作用下,車身周圍流場都有明顯變化,車身兩側的壓力差隨著側風強度增大而增大,風壓中心隨著側風強度增大而逐漸往車頭方向移動。
2)氣動側力系數和氣動側力都隨著側風強度的增大而增大,且增長趨勢明顯。
3)運用網格自適應方法、試驗設計方法與近似模型方法相結合進行車身側面優化,相比于傳統車身優化方法大幅度減少了優化時間。
4)通過優化車身側面結構:側圍弧度、側窗傾角、門檻弧度,使氣動側力系數降低18.65%,有效地提高車輛在側風作用下的氣動穩定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
