基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位法
2021-11-17 04:00:20張曉娜張淑芳
計(jì)算機(jī)仿真 2021年3期
張曉娜,張淑芳
(大連海事大學(xué)信息科學(xué)技術(shù)學(xué)院,遼寧大連116026)
1 引言
在大多數(shù)應(yīng)用場(chǎng)景,GPS定位系統(tǒng)雖然在室外條件下有著較高的定位精度,但復(fù)雜的室內(nèi)環(huán)境產(chǎn)生的信號(hào)易受建筑物等障礙遮擋、多徑傳播等效應(yīng)使得GPS難以滿足在室內(nèi)的定位需求[1-3]。因此,發(fā)展導(dǎo)航及目標(biāo)定位信息的相關(guān)技術(shù),對(duì)于如何實(shí)時(shí)、穩(wěn)定、高效的提供精確室內(nèi)的位置信息具有重要意義[4]。
石琴琴[5]等人提出基于RSSI測(cè)距的室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,通過(guò)信標(biāo)間的真實(shí)距離和RSSI衰減值對(duì)RSSI測(cè)距模型參數(shù)進(jìn)行反向?qū)崟r(shí)修正,通過(guò)牛頓迭代法獲取室內(nèi)動(dòng)態(tài)目標(biāo)的定位,該方法沒(méi)有對(duì)位置信息周跳值進(jìn)行探測(cè)與修復(fù),導(dǎo)致位置誤差較大。周牧[6]等人提出基于信號(hào)分布混合假設(shè)檢驗(yàn)的室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,通過(guò)混合Mann-Whitney U檢驗(yàn)/T檢驗(yàn)方法構(gòu)造匹配參考點(diǎn)集合,定位目標(biāo)區(qū)域,該方法不能對(duì)各個(gè)頻率上的小周跳進(jìn)行高精度修復(fù),導(dǎo)致姿態(tài)誤差較為嚴(yán)重。王安然[7]等人提出基于卡爾曼濾波預(yù)估的室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,采用卡爾曼濾波方法對(duì)動(dòng)態(tài)目標(biāo)坐標(biāo)進(jìn)行估計(jì),利用分區(qū)定位方式進(jìn)行定位,該方法在探測(cè)與修復(fù)中噪聲波動(dòng)范圍較大,導(dǎo)致速度不穩(wěn)定,即定位精準(zhǔn)度較低。
為了解決存在的問(wèn)題,提出基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,通過(guò)對(duì)室內(nèi)動(dòng)態(tài)觀測(cè)數(shù)據(jù)進(jìn)行預(yù)處理,探測(cè)出不同頻率的周跳值,對(duì)大周跳、小周跳均進(jìn)行修復(fù),獲得高質(zhì)量數(shù)據(jù)及準(zhǔn)確定位,GNSS/SLAM組合導(dǎo)航具有定位精度高,穩(wěn)定性強(qiáng)等優(yōu)勢(shì),對(duì)室內(nèi)定位及無(wú)線通信技術(shù)的發(fā)展具有廣闊的應(yīng)用前景。
2 室內(nèi)動(dòng)態(tài)目標(biāo)定位預(yù)處理
2.1 室內(nèi)動(dòng)態(tài)目標(biāo)定位去噪處理
信號(hào)處理目前已成為現(xiàn)代科學(xué)技術(shù)中不可或缺的一部分,而在信號(hào)處理的許多應(yīng)用中,信號(hào)傳輸過(guò)程中經(jīng)常受到環(huán)境的影響,導(dǎo)致初始信號(hào)變成含噪信號(hào),因此,對(duì)取得的信號(hào)進(jìn)行去噪是信號(hào)處理的關(guān)鍵[8]。基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,通過(guò)EMD-閾值處理組合進(jìn)行去噪,具體步驟如下:
假設(shè)原信號(hào)為x(t),高斯白噪聲為s(t),得到含噪信號(hào)為y(t),通過(guò)對(duì)含噪信號(hào)進(jìn)行去噪處理獲得距離原始信號(hào)最為接近的去噪信號(hào)x(t),即

(1)
基于EMD對(duì)含噪信號(hào)進(jìn)行分解,得到的分量由高到低進(jìn)行排列,一般情況下,噪聲能量大部分存在于高頻分量中,低頻分量中較少,因此低通濾波去噪方法需舍棄高頻分量階數(shù),重構(gòu)低頻分量,實(shí)現(xiàn)去噪目的[9]。從分解后的分量中提取噪聲能量和有用信號(hào)作為主要模態(tài)分界點(diǎn)。運(yùn)用連續(xù)均方根誤差準(zhǔn)則對(duì)IMF分量噪聲能量密度進(jìn)行計(jì)算,獲得有用信號(hào)分量分界點(diǎn)與噪聲分量,IMFk表示為有用信號(hào)分量分界點(diǎn),具體步驟如下

(2)
式中,n為分解階數(shù),N為信號(hào)長(zhǎng)度。IMF分量噪聲能量密度的變化曲線可通過(guò)連續(xù)均方誤差準(zhǔn)則獲得,在選取對(duì)于噪聲信號(hào)與期望信號(hào)均能起主導(dǎo)作用的位置時(shí),應(yīng)選擇曲線局極小值位置作為分界點(diǎn),并找到對(duì)應(yīng)的噪聲能量分布突變每個(gè)分解點(diǎn)的IMF分量,分解點(diǎn)k計(jì)算公式如下

(3)
當(dāng)有用信號(hào)能量起主導(dǎo)作用時(shí),此時(shí)分界點(diǎn)的噪聲能量成為全局最小值前的局部極小值。當(dāng)在全局極小值前存在局部極小值時(shí),k的表達(dá)式如下

(4)

(5)
為了有效保留部分有用信號(hào),在閾值處理及選取閾值函數(shù)時(shí),假設(shè)特定閾值為λ。據(jù)小波閾值去噪方法可知,設(shè)置閾值的規(guī)則主要包括極值閾值準(zhǔn)則、啟發(fā)式閾值準(zhǔn)則、固定閾值原則、無(wú)偏風(fēng)險(xiǎn)估計(jì)閾值準(zhǔn)則。固定閾值相比之下比較簡(jiǎn)單,通常會(huì)被優(yōu)先選用,其計(jì)算公式為
(6)
式中,N為信號(hào)長(zhǎng)度,λi為固定閾值,σe為噪聲標(biāo)準(zhǔn)差,Wi,j為信號(hào)分解后的分量系數(shù),噪聲標(biāo)準(zhǔn)差可采用魯棒估計(jì)進(jìn)行計(jì)算。
小波去噪閾值處理一般會(huì)使用硬閾值函數(shù)與軟閾值函數(shù),通常軟閾值函數(shù)效果更好一些[11]。軟閾值去噪時(shí),對(duì)于小于閾值系數(shù)的分量進(jìn)行歸零處理,對(duì)于大于閾值λ的系數(shù)Wλ則選取最初系數(shù)與閾值的差額進(jìn)行計(jì)算,經(jīng)過(guò)軟閾值處理后,整體效果平展性與持續(xù)性較好,表達(dá)式如下

(7)


(8)
基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,將EMD-閾值處理組合進(jìn)行去噪,可高效的剔除大部分存在于高頻分量的噪聲能量,并使分解中的小部分噪聲也隨之清除,使去噪效果更佳,去噪目的更準(zhǔn)確。
2.2 周跳探測(cè)與修復(fù)
周跳探測(cè)與修復(fù)是基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法觀測(cè)數(shù)據(jù)預(yù)處理的核心[12]。具體步驟如下:
1)φ(0,1,-1)組合觀測(cè)值周跳的探測(cè)與修復(fù)
設(shè)φ(0,1,-1)為無(wú)周跳的載波相位組合觀測(cè)值,利用式(9)、(10)可探測(cè)與修復(fù)φ(0,1,-1)組合觀測(cè)值的周跳,表達(dá)式如下

(9)
2)φ(1,-3,2)組合觀測(cè)值周跳的探測(cè)與修復(fù)
當(dāng)φ(0,1,-1)載波相位組合觀測(cè)值周跳實(shí)現(xiàn)探測(cè)與修復(fù)后,根據(jù)φ(1,-3,2)組合觀測(cè)值和無(wú)周跳φ(0,1,-1)載波相位組合觀測(cè)值獲得幾何無(wú)關(guān)觀測(cè)值,通過(guò)下式對(duì)φ(1,-3,2)相應(yīng)的周跳進(jìn)行探測(cè)與修復(fù)
S(1,-3,2)λ(1,-3,1)=I1+Δφ(0,1,-1)λ(0,1,-1)-Δφ(1,-3,2)λ(1,-3,2)
(10)
式中,Δ描述的是歷元差分,S(1,-3,2)為組合觀測(cè)值φ(1,-3,2)的周跳,I1為歷元之間對(duì)應(yīng)幾何無(wú)關(guān)組合觀測(cè)值的變化程度。
在數(shù)據(jù)處理時(shí),線性擬合與高次差對(duì)φ(0,1,-1)組合觀測(cè)值的周跳進(jìn)行探測(cè)與修復(fù)。
3)φ(-3,1,3)組合觀測(cè)值周跳的探測(cè)與修復(fù)
由1)、2)步獲得無(wú)周跳的φ(0,1,-1)與φ(1,-3,2)組合觀測(cè)值,可形成無(wú)周跳且觀測(cè)值噪聲較小的φ(1,0,-1)組合觀測(cè)值,即
φ(1,0,-1)=3φ(0,1,-1)+φ(1,-3,2)
(11)
利用該組合與φ(-3,1,3)組合觀測(cè)值構(gòu)建對(duì)應(yīng)的組合觀測(cè)值,通過(guò)上述步驟2)的方法對(duì)φ(-3,1,3)組合觀測(cè)值的周跳進(jìn)行探測(cè)與修復(fù),公式如下
S(-3,1,3)λ(-3,1,3)=I2+Δφ(1,0,-1)λ(1,0,-1)-Δφ(-3,1,3)λ(-3,1,3)
(12)
4)初始載波觀測(cè)值的周跳
上述過(guò)程結(jié)束后,如前期組合觀測(cè)值均無(wú)周跳發(fā)生,那么原始載波相應(yīng)的觀測(cè)值也無(wú)周跳發(fā)生。但如有組合觀測(cè)值發(fā)生周跳,那么可通過(guò)下式進(jìn)行計(jì)算周調(diào)值[13]。
(13)
周跳探測(cè)與修復(fù)在高精度數(shù)據(jù)處理中一直都是比較重要的環(huán)節(jié),對(duì)于高采樣率的非差相位觀測(cè)數(shù)據(jù)能夠快速和準(zhǔn)確地探測(cè)及修復(fù)周跳,為高精度室內(nèi)定位提供了較好的數(shù)據(jù)質(zhì)量控制。
3 高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法
SLAM為同步定位與制圖技術(shù),GNSS為優(yōu)越的導(dǎo)航技術(shù),普遍被各個(gè)領(lǐng)域所應(yīng)用。在部分場(chǎng)景中,由于傳播環(huán)境復(fù)雜,傳播通道受到干擾,GNSS信號(hào)無(wú)法被接收,其導(dǎo)航功能失效,因此GNSS/SLAM組合可以獲取高精度的環(huán)境特征,提供的準(zhǔn)確的定位信息[14]。在GNSS SLAM組合算法中,對(duì)于參考坐標(biāo)系下激光雷達(dá)坐標(biāo)系的姿態(tài)角、傳感器及已觀測(cè)到的全部地標(biāo)點(diǎn)的位置向量,均為k時(shí)刻的系統(tǒng)狀態(tài)向量,即表示為:
(14)
N(Xk/k,Pk/k)為系統(tǒng)狀態(tài)向量的后驗(yàn)概率密度。期望均值與協(xié)方差分別表示為

(15)
如GNSS/SLAM組合觀測(cè)到新的地標(biāo)點(diǎn),則將新地標(biāo)點(diǎn)的位置向量增加到系統(tǒng)狀態(tài)向量中,詳細(xì)流程如下
首先進(jìn)行時(shí)間更新,具體方程如下
(16)
式中

(17)
式中,Q為過(guò)程噪聲矩陣。
其次進(jìn)行數(shù)據(jù)關(guān)聯(lián),將新觀測(cè)的地標(biāo)點(diǎn)與初始地標(biāo)點(diǎn)進(jìn)行匹配,通過(guò)已存在的地標(biāo)觀測(cè)值進(jìn)行計(jì)算
k|k=k|k-1+Kkμk
Pk|k=(I-KkHk)Pk|k-1
(18)
其中

(19)
式中,Ra為已存在地標(biāo)的觀測(cè)噪聲矩陣,za,k為已存在的地標(biāo)點(diǎn),zb,k為新觀測(cè)到的地標(biāo)點(diǎn)。系統(tǒng)狀態(tài)增廣為

(20)
式中,mb為新觀測(cè)到地標(biāo)點(diǎn)距離。將新觀測(cè)到的地標(biāo)點(diǎn)位置向量增加到系統(tǒng)狀態(tài)向量中。
從上述過(guò)程中看出,GNSS SLAM組合相對(duì)于傳統(tǒng)的GNSS增加了數(shù)據(jù)關(guān)聯(lián)和狀態(tài)增廣的過(guò)程,數(shù)據(jù)關(guān)聯(lián)是GNSS SLAM組合中重要一步,另外特征提取也是GNSS SLAM組合的前提條件[15]。
4 實(shí)驗(yàn)結(jié)果與分析
為了驗(yàn)證基于GNSS SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法的整體有效性,進(jìn)行相關(guān)實(shí)驗(yàn)。本次實(shí)驗(yàn)在開(kāi)發(fā)環(huán)境(Graphic User Interface Design Environment GUIDE)下完成開(kāi)發(fā)。UWB 測(cè)距性能可能受到外部環(huán)境和系統(tǒng)硬件等因素影響,因此在進(jìn)行目標(biāo)定位之前首先需要對(duì) UWB 測(cè)距進(jìn)行誤差修正。

圖1 實(shí)驗(yàn)的硬件平臺(tái)
采用基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法(方法1)、基于RSSI測(cè)距的室內(nèi)動(dòng)態(tài)目標(biāo)定位方法(方法2)、基于信號(hào)分布混合假設(shè)檢驗(yàn)的室內(nèi)動(dòng)態(tài)目標(biāo)定位方法(方法3)進(jìn)行測(cè)試。
測(cè)試位于一間實(shí)驗(yàn)室與一間辦公室內(nèi),內(nèi)有桌椅,設(shè)備等,其室內(nèi)布局圖如圖下圖2所示。
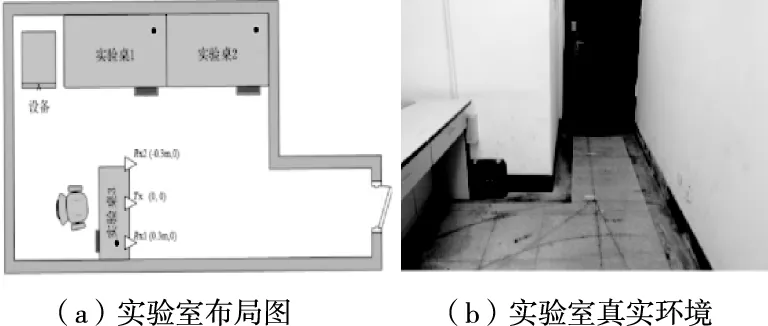
圖2 實(shí)驗(yàn)室環(huán)境示意圖
假設(shè)測(cè)量得到的第k個(gè)動(dòng)態(tài)目標(biāo)坐標(biāo)為Mk(xk,yk),真實(shí)軌跡所有點(diǎn)坐標(biāo)的集合為Mr(xr,yr),則定位誤差de表示為:
de=min|Mk-Mr|
(21)
具體測(cè)試結(jié)果如圖3所示。
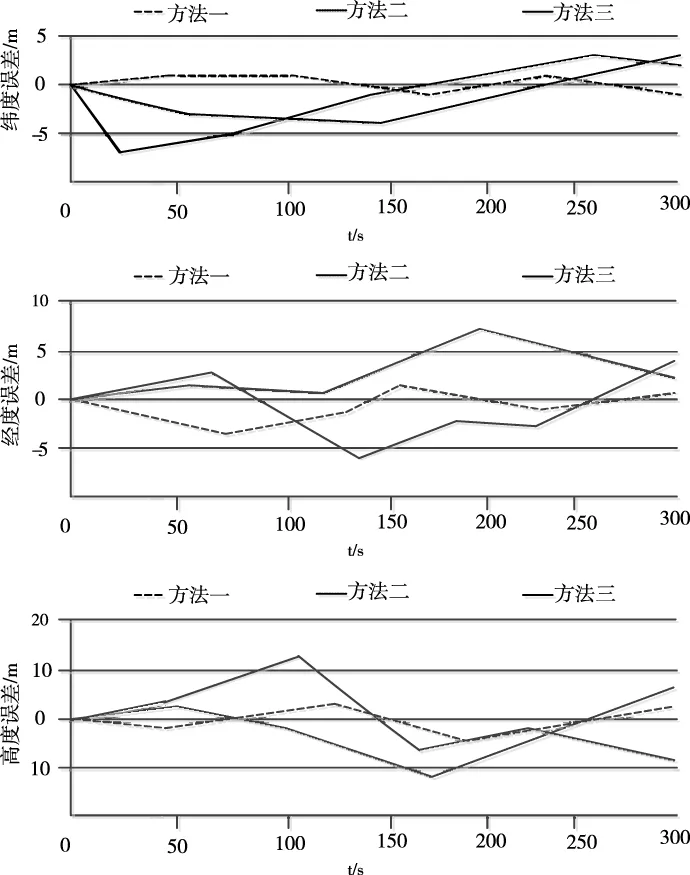
圖3 定位誤差
由圖3可知,在位置誤差測(cè)試中方法1的誤差更接近于0,證明此方法的定位更接近動(dòng)態(tài)目標(biāo),位置更精準(zhǔn)。方法2與方法3的由于緯度誤差、經(jīng)度誤差、高度誤差浮動(dòng)較大,因此位置誤差較大,即定位精準(zhǔn)度較低。因?yàn)榉椒?將觀測(cè)數(shù)據(jù)進(jìn)行周跳探測(cè)與修復(fù),不管對(duì)于大周跳還是小周跳,均能探測(cè)出各個(gè)頻率上發(fā)生的周跳,能夠以一定的精度進(jìn)行修復(fù),獲得高質(zhì)量數(shù)據(jù),使得位置誤差更接近于0,即準(zhǔn)確的實(shí)現(xiàn)了室內(nèi)目標(biāo)定位。
在實(shí)驗(yàn)中,一個(gè)測(cè)試人員沿著一個(gè)長(zhǎng)方形的軌跡勻速移動(dòng)。動(dòng)態(tài)圖目標(biāo)跟蹤測(cè)量結(jié)果如圖4所示。
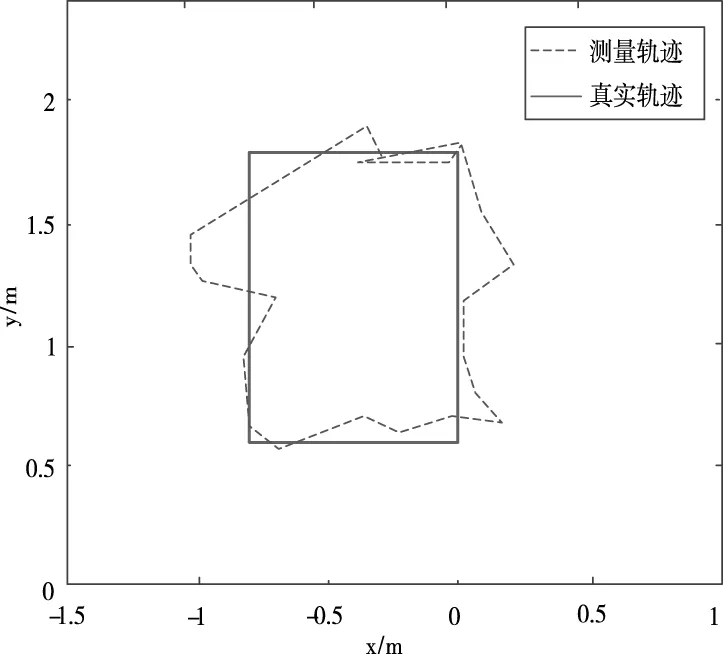
圖4 動(dòng)態(tài)圖目標(biāo)跟蹤測(cè)量結(jié)果
動(dòng)態(tài)目標(biāo)測(cè)量的誤差較小。主要原因在于本文方法對(duì)觀測(cè)數(shù)據(jù)進(jìn)行周跳探測(cè)與修復(fù),探測(cè)與修復(fù)各個(gè)頻率上發(fā)生的周跳,準(zhǔn)確的實(shí)現(xiàn)室內(nèi)目標(biāo)定位。
5 結(jié)束語(yǔ)
動(dòng)態(tài)背景下的運(yùn)動(dòng)目標(biāo)檢測(cè)與定位,當(dāng)前方法在周跳探測(cè)與修復(fù)中對(duì)不同頻率區(qū)域無(wú)法進(jìn)行高精度修復(fù),難以獲取高質(zhì)量數(shù)據(jù),導(dǎo)致位置及姿態(tài)誤差較大、速度不穩(wěn)定等現(xiàn)象。即室內(nèi)動(dòng)態(tài)目標(biāo)定位的精準(zhǔn)度較低,對(duì)此問(wèn)題提出了基于GNSS/SLAM組合高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位方法,對(duì)室內(nèi)動(dòng)態(tài)觀測(cè)數(shù)據(jù)進(jìn)行預(yù)處理,探測(cè)出各個(gè)頻率上發(fā)生的周跳,高精度進(jìn)行修復(fù),獲得高質(zhì)量數(shù)據(jù),精準(zhǔn)定位室內(nèi)動(dòng)態(tài)目標(biāo),該方法有效地解決了當(dāng)前方法中存在的問(wèn)題,為高精度室內(nèi)動(dòng)態(tài)目標(biāo)定位的實(shí)現(xiàn)提供基礎(chǔ)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
