基于LiDAR的溫室番茄冠層幾何參數提取
2021-11-17 12:02:20楊征鶴楊會民陳毅飛王學農
新疆農業科學 2021年10期
關鍵詞:測量
楊征鶴,喻 晨,楊會民,陳毅飛,周 欣,馬 艷,王學農
(1.新疆農業大學機電工程學院,烏魯木齊 830052;2.新疆農業科學院農業機械化研究所,烏魯木齊 830091)
0 引 言
【研究意義】植物冠層數據是分析植物生長狀態的重要參數,利用傳感器技術檢測植物位置信息及輪廓外形是對靶精準噴霧技術的基礎[1],探測作物幾何信息是對靶噴霧技術的重要研究內容[2],植物冠層體積特征也是調整農藥用量的關鍵。溫室中環境較為穩定,更加適合使用激光雷達采集作物信息。獲取溫室環境中番茄作物冠層數據,搭建基于激光雷達的溫室番茄冠層檢測平臺,研究提出1種基于點云的單株番茄分割和體積獲取方法,對實現從番茄作物行中獲取單株番茄植株冠層數據與體積有實際意義。【前人研究進展】檢測冠層表征采用的有超聲波傳感器技術、立體視覺技術、光傳感器技術及激光雷達傳感器技術[3]。超聲波技術已經在計算作物冠層體積[4]和估算冠層密度[5]得到應用,Maghsoudi等[6]使用超聲波傳感器進行果樹冠層量的有效估計,以減少果園中農藥用量。翟長遠等[7]基于超聲波傳感器設計了1種果樹靶標體積的探測方法。但在實際使用中超聲波傳感器存在靶向性及采樣頻率較低等問題,存在一定的誤差。Sylvain等[8]利用圖像技術和SFM技術建立了作物行三維模型,預估植物高度和葉面積。立體視覺技術及光傳感器受外界環境光影響較大[9],穩定性不足,在實際應用限制較多,相比之下利用激光雷達檢測冠層表征是現階段最高效的技術。激光雷達傳感器具有速度快、精度高、靶向性強、非接觸性、受外界環境光影響較小等優點[10],在預測冠層表征方面較為可靠,并已經廣泛應用[11-13],且在不規則植株冠層特征信息的獲取中有著難以比擬的優勢[14]。Jordi等[15]驗證了二維激光雷達測定植株體積和密度相關的冠層參數的精度,俞龍等[16]基于二維激光雷達設計了1種對丘陵山地果樹冠層體積的激光測量方法,吳志鵬等[17]使用激光雷達對果樹輪廓進行測量,試驗結果證明,該方法具有一定的可行性。張美娜等[18]使用二維激光雷達設計了1種靶標探測系統試驗平臺,提出了1種基于點云信息的靶標葉面積密度的計算方法。三維雷達相較于二維雷達具有更高的信息獲取能力,Ravi等[19]將LiDAR與無人機相結合,獲取作物冠層覆蓋情況并建立作物冠層地圖,管賢平等[20]將三維激光雷達與導航系統、無人機相結合獲取大田大豆單株幾何冠層幾何參數。【本研究切入點】激光雷達現階段多用于針對森林或果園中林木及果樹的冠層數據提取,很少在溫室環境中對蔬菜類作物冠層進行分析。研究基于LiDAR的溫室番茄冠層幾何參數提取。【擬解決的關鍵問題】以番茄作物行為目標,設計基于LiDAR的溫室番茄冠層檢測平臺,在番茄作物行兩側勻速運行激光雷達,獲取番茄植株的三維點云信息,對點云進行去噪、配準處理,從行點云中分割獲取單株點云,獲取冠層信息,將點云重建并獲取體積信息,驗證獲取的三維輪廓的準確性,比較與凸包算法和人工測量值,驗證裝置的精準性。
1 材料與方法
1.1 材 料
1.1.1 番茄
選擇新疆烏魯木齊西山的一處溫室番茄種植園內,選擇的番茄作物生長期分別為40、80 d,高約0.6和1.5 m,株距同為0.3 m,分別定義為A組和B組。
1.1.2 儀器設備
試驗平臺主要由激光雷達部分、支架部分、導軌部分組成,其中導軌部分主要由滑塊、線軌部分、步進電機、控制器及電源部分組成,激光雷達部分直接與PC機相連。圖1
選用銳博公司生產的XG80導軌平臺,該導軌平臺具有承載能力強、精度較高、穩定性好的優點。滑軌總長度為1 500 mm,滑塊通過步進電機驅動,精度良好,滑塊移動速度為10~50 mm/s,滑塊所連接的支架高度可調,以適應不同的作業環境。
選用北科天繪公司的R-Fans-32線程激光雷達。激光幀頻在5~20 Hz可調,最大探測距離為200 m,距離分辨率為4 mm,激光波長為905 nm,測程遠,回波強度較為準確,測量精度較高,角度覆蓋和角分辨率,有效的抵抗背景光的干擾。
1.2 方 法
番茄作物行點云通過獲取、配準等一系列處理,最后獲取單株點云并通過MATLAB進行重建與體積的計算。圖2
1.2.1 番茄行點云獲取
激光雷達使用飛行時間原理進行計算[21],激光雷達的坐標生成Point(X,Y,Z)。圖3
從XY平面方向對單株點云直接測量,計算點云中的最高點和最低點的差值作為激光雷達獲取的番茄植株的冠層高度HL,人工測量值為從平行于導軌方向使用卷尺從每株番茄中獲取冠層高度HM。
點云中每個點的坐標計算:
Angle=-wt-w×ΔT-(H_Bta).
(1)
X=Range×cos(V_theta)×cos(Angle).
(2)
Y=Range×cos(V_theta)×sin(Angle).
(3)
Z=Range×sin(V_theta).
(4)
式中:Angle為雷達中激光發生器偏轉角度,w為其瞬時角速度,Range為該點回波距離,ΔT為激光發射與接收時間偏差,H_Bta為水平角度,V_theta為垂直角度。
將激光雷達分別固定在距地面0.4和0.8 m處,與番茄作物行的距離設置為2 m。支架安裝到滑塊上,導軌與番茄植株進行平行放置。使用探測試驗平臺,在溫室中分別對2組番茄植株依次進行探測。使用水平儀將導軌進行水平放置,激光雷達設置10 Hz的掃描速度,掃描起始角度設置為-45°,終止角度為45°,以減少其他外界環境點云的影響,設置0.05 m/s的滑塊速度運行。運行激光雷達,使用雷達上位機軟件CtrlView獲取點云數據并以.xyz格式進行存儲,獲取到的點云數據。圖4,圖5
1.2.2 點云去噪與匹配
點云去噪是通過為每個點搜索指定鄰域點個數的相鄰點,計算其與鄰域點的平均距離,并計算這些平均距離的中值和標準差。如果該點的平均距離大于最大距離,則將其視為噪聲點,將其去除。
利用ICP(Iterative Closest Points)即迭代最近點算法對雙側點云進行匹配。ICP配準算法是比較常用的點云配準方法之一,其基本原理為在P、Q兩目標點云中,按照一定的約束找到最近的鄰近點,計算出平移參數T和旋轉參數R,對Q使用求得的平移和旋轉參數,得到新的變換點集;如果新的變換點集與參考點集滿足2點集的平均距離小于某一給定閾值,則停止迭代計算,否則新的變換點集作為新的Q繼續迭代,直到達到目標函數的要求[22],目標函數為:
(5)
1.2.3 地面分割
獲取番茄冠層高度需要去除地面,常用的地面分割方法有平面擬合、RANSAC算法等[23],由于溫室地面相比大田環境較為平整,選擇平面擬合算法,地面在X、Y、Z3個方向上都存在一定的誤差[24],選用基于特征值法擬合點云平面[25],設置擬合點云平面方程為:
ax+by+cz=d.
(6)
式中:a、b、c為單位法向量,其中d為坐標原點到該擬合平面的距離,則對某一平面掃描的n個數據點的坐標為(xi,yi,zi),則任意數據點到該擬合平面的距離為:
di=|axi+byi+czi-d|.
(7)
并且能夠滿足:
(8)
1.2.4 單株番茄點云分割算法
番茄植株在實際的生長過程中,相鄰的番茄植株會出現葉片的交織,在激光雷達獲取的番茄植株點云中出現單株番茄植株的邊緣界定不清晰,影響冠層數據的采集和冠層體積的計算。在番茄點云中,單株番茄點云中心密度較高,兩側較低,根據這一特征,采用均值漂移算法(Meanshift)進行單株點云分割。均值漂移算法是通過沿著點云密度上升方向尋找聚簇點,初始確定1個中心點,然后計算在設置的一定空間內對所有的點xi與中心點的向量,并計算出整個點云空間的平均值,得到1個偏移均值,將中心點移動到偏移位置,重復移動,直到滿足一定條件后結束[26-27],其中偏移均值為:
(9)
式中:以x為中心點,半徑為h的高維度球區域,k為包含在Sh范圍內的點數,xi為包含在Sh內的點。中心點的更新:
xt+1=Mt+xt.
(10)
式中:Mt為t狀態下求得的偏移均值,xt為t狀態下的中心。
使用LiDAR360軟件直接從XY平面方向對單株點云直接測量,計算點云中的最高點和最低點的差值作為激光雷達獲取的番茄植株的冠層高度HL,人工測量值為從平行于導軌方向使用卷尺從每株番茄中獲取冠層高度HM。圖6
1.2.5 單株番茄植株體積計算
選取的alp值為0.1,其中alp值越小,網格化體積越小,得到的點云體積更加精確。驗證使用alpha shape算法求取體積的精度,使用凸包算法(Convex hull)求取體積,作為參考值對比。凸包算法能夠對單株點云數據建立一個能夠將所有點云都包含在內的最小整體凸包。
由于番茄植株具有并不規則的外形,枝葉相互遮擋,在計算體積時,需要對番茄植株點云數據進行三維重建。該次試驗使用alpha shape算法對番茄植株的三維點云進行重建[28],alpha shape算法能夠在離散的三維點云空間中提取邊緣并建立對應最小包絡。從A組和B組各選取10株番茄進行點云重建,選取的alp值為0.1,其中alp值越小,網格化體積越小,得到的點云體積更加精確,從而更精準的對番茄植株進行重建,最后使用Volume函數對所重建后包絡進行體積的計算[29]。為驗證使用alpha shape算法求取體積的精度,使用凸包算法(Convex hull)求取體積,作為參考值進行對比。凸包算法能夠對單株點云數據建立一個能夠將所有點云都包含在內的最小整體凸包,并進行體積的計算。
使用人工測量的方式對隨機5株番茄植株進行體積獲取。在單株體積計算時,獲取的5個位置的冠層寬度,將5處位置的橫截面近似為橢圓,求出橢圓面積與每個部分的冠層高度相乘,并通過累加得到番茄植株的冠層體積。
1.2.6 精度驗證

(11)
Va=VLi-VMi.
(12)
(13)
(14)
(15)
式中:n為番茄株數。
2 結果與分析
2.1 規則框架人工測量值與系統檢測值對比
研究表明,在激光雷達前進方向上最大相對誤差為-2.8%,誤差值為-1.7 cm,在垂直于激光雷達前進方向最大相對誤差為-4.5%,誤差值為-3.6 cm,該檢測平臺在較小的測量范圍內沿激光雷達前進方向上誤差較小,誤差控制在10 cm以內。圖7,表1
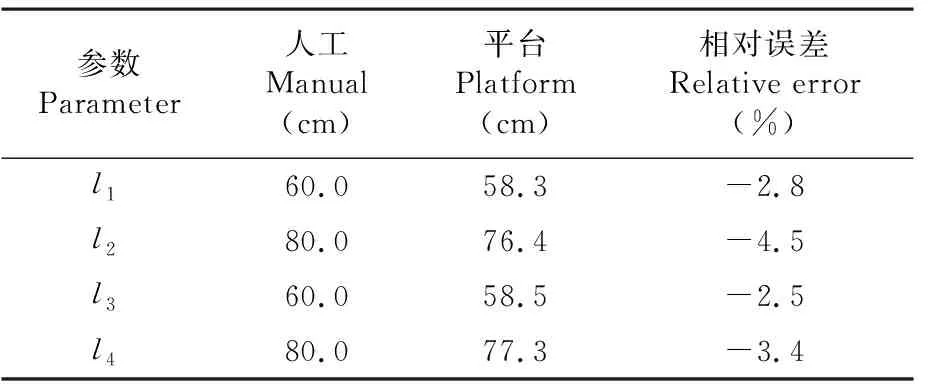
表1 規則框架人工測量值與系統檢測值對比Table 1 Comparison table between the manual measurement value of rule support and the platform detection value
2.2 冠層高度人工測量值與平臺檢測值對比
研究表明,A組為y=1.007 9x+0.020 1,R2=0.902 2,均方根誤差為RMSE=0.039,平均絕對誤差為0.025 m,B組為y=0.855 2x+0.267,R2=0.848 7,均方根誤差為RMSE=0.043,平均絕對誤差為0.031 m,各評價指標達到了較好的水平[30]。表2,圖8,圖9
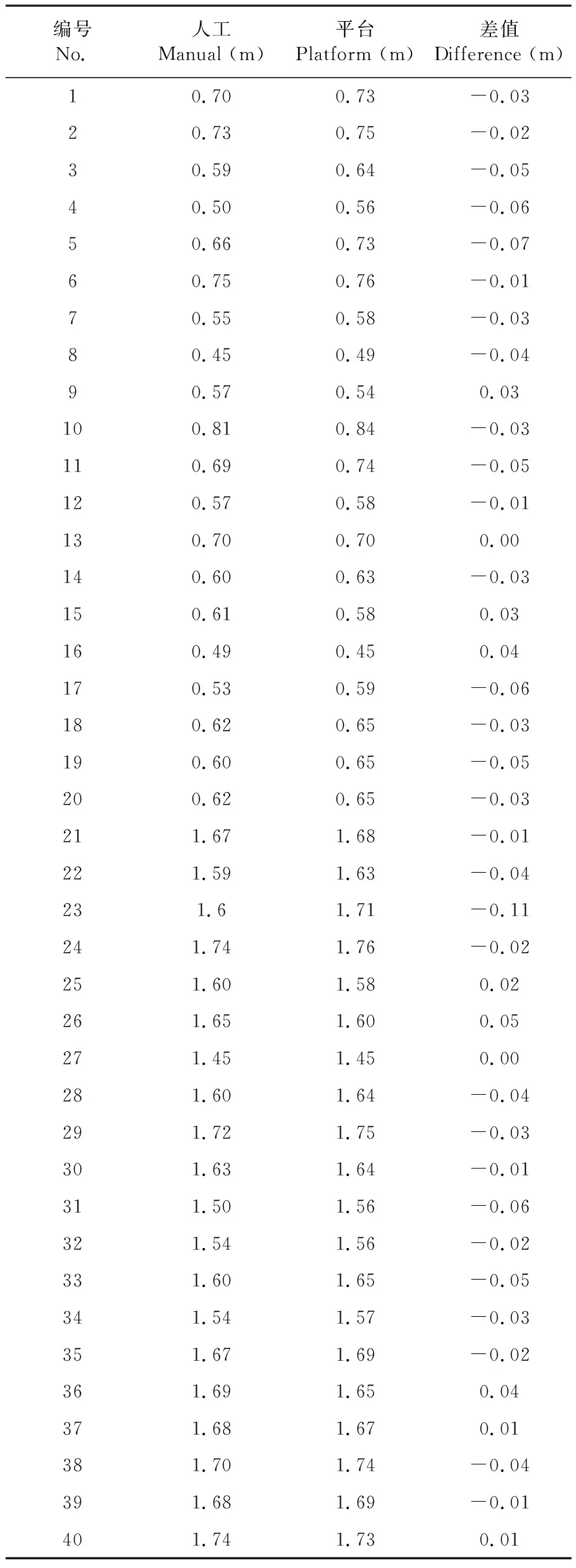
表2 冠層高度人工測量值與平臺檢測值對比Table 2 Comparison of canopy height measuredmanually with platform measured values
2.3 番茄冠層重建與體積

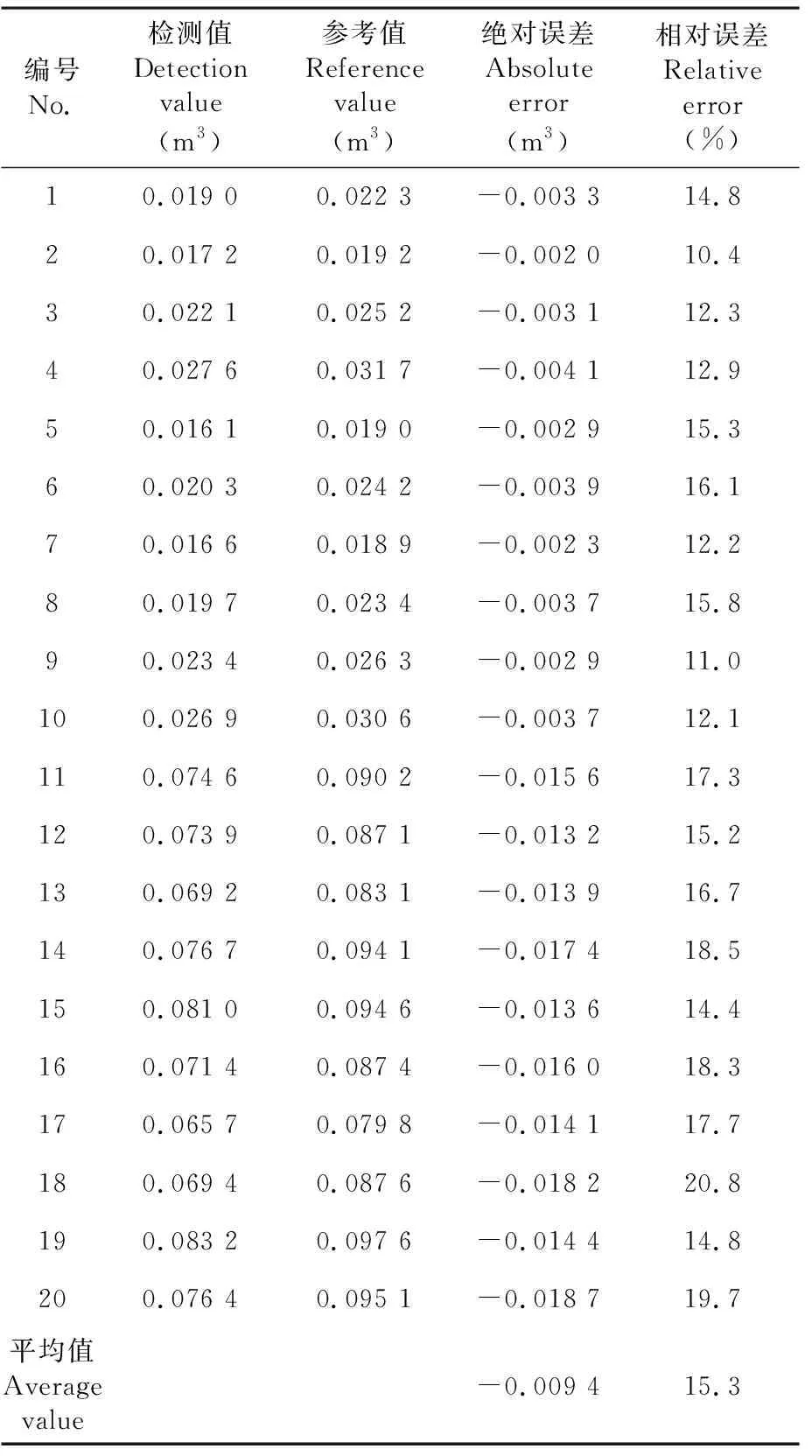
表3 番茄冠層體積平臺檢測值與參考值Table 3 Detection value and reference value of tomato canopy volume platform
獲取的5個位置的冠層寬度,將5處位置的橫截面近似為橢圓,求出橢圓面積與每個部分的冠層高度相乘,并通過累加得到番茄植株的冠層體積。人工測量值與平臺檢測值的VRMSE為0.015,絕對誤差Va最大為0.021 4 m3,最小為0.003 6 m3,相對誤差m最大為21.9%,最小為14.6%,平臺檢測值與人工測量值相差不大,能夠滿足實際需求。表4
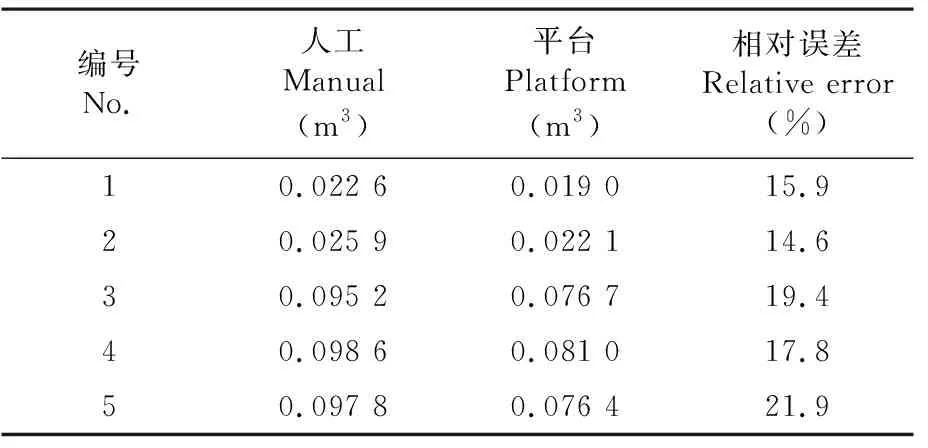
表4 人工測量與平臺檢測體積對比Table 4 Comparison table between manual measurement and platform detection volume
3 討 論
利用激光雷達進行植物冠層數據的分析已經具備較大的發展潛力,激光雷達能夠快速直接獲取植物冠層形狀,信息準確度較高,受外界環境影響較小,是其他技術無法比擬的優勢。在實際的使用中,激光雷達在使用時需要保證一定的穩定性,減少因為振動而造成的噪點過多,從而影響數據的準確性。
采用平面擬合算法對地面進行分割時對地形的要求較高,若地形起伏較大,則產生的誤差較大。采用均值漂移算法進行單株番茄植株的分割時,當植株枝葉過于茂密,相鄰植株間交織嚴重,激光雷達獲取的點云密集,從而無法通過點云特征處理,應根據不同作物的生長狀況,采用不同的分類方法對單個植物進行分割[30]。通過alpha shape算法獲得的植株體積小于使用凸包算法獲取的體積,是因為alpha shape算法能夠減少冠層間空隙帶來的影響。
4 結 論
4.1溫室環境中,作物狀態較為穩定,受外界環境影響較小,相比于大田環境更加適合使用檢測平臺,檢測平臺在前進方向與垂直前進方向的測量誤差分別為-2.65%、-3.95%。
4.2采用基于平面擬合和均值漂移算法以實現從點云中分割地面和從番茄行中分割單株番茄點云,與人工測量冠層數據值相比,A、B 2組的均方根誤差RMSE分別為0.039和0.043,平均絕對誤差分別為0.025和0.031 m,均取得了較好的結果。
4.3對單株點云使用alpha shape算法進行重建并進行體積的計算,平均絕對誤差為0.009 4 m3,與凸包算法獲得結果相比,平均相對誤差下降了約15.3%,與人工獲取相比,VRMSE為0.015,最大相對誤差為21.9%,最小相對誤差為14.6%,該結果與實際值相差不大。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
