環量控制翼型非定常氣動力建模
2021-11-18 06:28:26雷玉昌張登成張艷華
北京航空航天大學學報 2021年10期
關鍵詞:模型
雷玉昌,張登成,張艷華
(1.空軍工程大學 研究生院,西安 710051;2.中國人民解放軍95034部隊,百色 533600;3.空軍工程大學 航空工程學院,西安 710038)
在航空技術應用中,使用環量控制技術作為主動流動控制的解決方案越來越引起人們的注意[1-2]。環量控制技術是指在翼型后緣表面開縫以形成沿著物面切向的射流,用以增加沿著翼型表面的環量,進而增加升力[3-4]。風洞試驗和數值仿真結果表明,環量控制技術能夠大幅度提高翼型升力,并在高升力條件下改善升阻比[5-6]。環量控制技術最初就是因為其卓越的高升力性能而引起關注,經過八十多年的發展,該技術逐漸在無尾飛行器的氣動力控制、風力渦輪機的載荷控制、降低噪聲、降低飛行器結構質量及提高隱身性能等方面表現出優越的性能[7-10]。特別是在無尾飛行器的控制方面,逐漸表現出了替代傳統控制舵面的發展趨勢。英國BAE系統公司先后試飛了“惡魔(Demon)”、“Magma”等技術驗證無人機,利用環量控制技術進行了滾轉操作,驗證了環量控制射流替代傳統舵面的可行性[11-12]。雖然已經證明了環量控制技術的相關優越性,但要實現可用的環量控制射流,還有很多關鍵理論和技術問題需要研究。其中考慮迎角改變時環量控制射流對于非定常氣動力的瞬態反應是必不可少的。因為一方面環量控制射流并不能像傳統舵面一樣,在迎角改變時與翼型保持同步偏轉,而是存在時間遲滯效應;另一方面高動量系數情況下會導致機翼提前失速,導致翼型在中小迎角下就會出現失速分離情況。因此,傳統飛行器的非定常氣動力模型將無法適用于環量控制飛行器。而飛機過失速機動時會產生流動分離和漩渦破碎,使得氣動力和氣動力矩呈現高度的非線性和非定常特性[13-14]。建立環量控制翼型在機動過程中的非定常氣動力模型,對于準確理解射流作用機理及進行飛行控制系統設計具有重要意義。
目前,關于環量控制技術的研究中并未建立起高精度的非定常氣動力模型。Loth和Englar等[15-16]給出了基于定常實驗數據的曲線擬合公式,其中,文獻[15]給出的經驗公式在較低迎角、單射流情況下與可用實驗數據有較好的一致性。Hoholis[17]針對二維環量控制翼型的氣動參數進行了曲線擬合,并添加了穩定性導數以凸顯其非定常效應,結果表明,該方法對升力和力矩系數預測結果較好,對阻力系數預測較差,而且并不能準確預測非定常效應的氣動力遲滯效應。Krukow和Dinkler[18]在進行環量控制機翼的氣動彈性研究中利用高階多項式擬合得到了定常氣動力模型。Semaan等[19]使用LASSO方法辨識了周期性射流和脈沖型射流疊加后對機翼升力系數的增量影響。綜上所述,目前對于環量控制飛行器氣動力模型的建立多集中在定常模式下,對非定常氣動力模型的研究較為匱乏。而傳統飛行器非定常氣動力建模的發展已經歷經了幾十年,逐漸發展形成了氣動導數模型[20]、狀態空間模型[21]和微分方程模型[22]等數學模型和模糊邏輯模型[23]、神經網絡模型[24]等人工智能模型。這些模型都能在一定程度上描述傳統飛行器在大迎角下的非定常氣動力變化趨勢。
因此,本文借助高精度的數值仿真技術,分析環量控制翼型非定常流動狀態。基于微分方程模型,添加環量控制射流參數源項。通過兩步線性回歸參數辨識方法建立適用于環量控制翼型的非定常氣動力數學模型,并對高動量系數下的非線性影響進行修正。通過對任意條件下的非定常流動充分建模,用于環量控制技術的非定常狀態研究。
1 數值計算方法與驗證
1.1 計算模型和網格
超臨界翼型有著鈍前緣、大厚弦比的特點,內部能夠容納環量控制技術所需要的供氣機構或管道等,因而成為環量控制技術良好的研究翼型。本文采用修形過的超臨界翼型進行相關研究。翼型相對厚度為17%,弦長c=240 mm。采用文獻[25]中的修形方法,將距后緣25%弦長的部分修形處理,按照后緣半徑r/c=2%繪制柯恩達后緣曲面,射流口高度h=0.001c。圖1為修形過的超臨界翼型示意圖。計算區域選取翼型弦長的30倍,網格剖分時采用結構網格,生成O型網格拓撲結構,邊界層內第1層的網格高度約為1×10-5m,射流口附近第1層網格高度為2×10-6m,保證第1層高度的y+均小于1,以滿足黏性底層的計算要求。網格總數約為58萬,進行非定常計算時采用FLUENT網格動態重構技術,圖2為翼型網格劃分及非定常計算過程迎角α從-5°變化到5°翼型后緣網格變形情況。可以看出,網格適應情況較好。
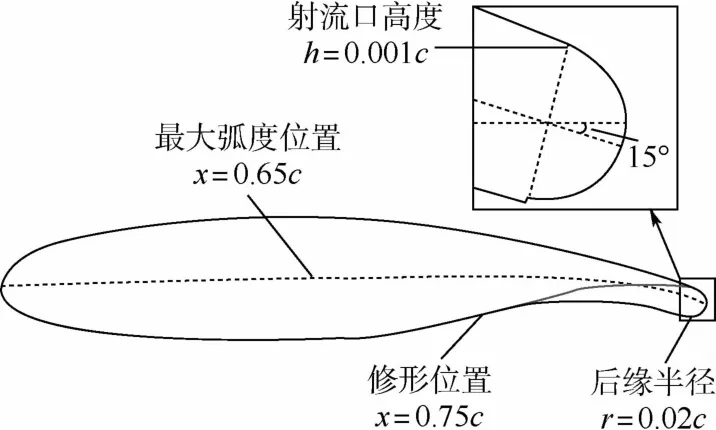
圖1 修形后的超臨界翼型Fig.1 Supercritical airfoil after modification
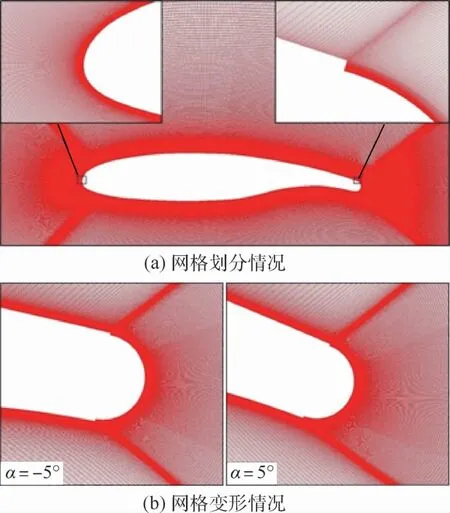
圖2 翼型計算網格Fig.2 Airfoil’s computational grid
1.2 計算方法和驗證
本文的數值模擬方法采用二維雷諾平均Navier-Stokes方程,其積分形式為

式中:Q為流動變量;Ω為控制體;FC和FV分別為無黏性通量和黏性通量;n為控制體面的外法線向量。采用k-εSST湍流模型,該模型對于有較大逆壓梯度的邊界層流動、分離預測性能較好。采用有限體積法離散控制方程,黏性通量采用二階迎風格式離散。遠場邊界為壓力遠場,壁面邊界采用無滑移壁面條件。
本文采用的數值仿真軟件為商用軟件FLUENT。采用的求解器為基于Simple方法的Pressure-Based Solver。對求解不可壓縮流動及微可壓流動效果較好。該方法對于非定常問題的流動計算,主要借助隱式時間積分方案,在每個計算時間步內進行迭代,在計算步之內的內迭代計算與普通穩態問題的內迭代計算是相類似的,在得到本時間步內的收斂解之后,轉入下一個時間步進行繼續計算。
為了驗證本文所采用數值計算方法的準確性,分別對標模NACA0012翼型強迫俯仰振動下的非定常氣動力數據及環量控制翼型在射流吹氣下的定常氣動力數據進行對比驗證。
對于標模NACA0012翼型而言,計算過程中強迫翼型繞重心做俯仰振蕩,其迎角變化規律為

式中:減縮頻率k=ωc/(2V)∞,c為弦長;V∞為來流速度為無量綱時間;α0為基準迎角;αm為振幅。減縮頻率用來描述翼型的振蕩頻率。計算條件:k=0.081 4,α0=0.016°,αm=2.51°。本文計算時采用的物理時間步長t=0.01T,內迭代步數為50,其中T表示翼型非定常運動周期。為加快收斂,初始解從中心迎角處的定常收斂解開始計算。將計算結果與文獻[26]中Landon的實驗結果和Uygun的數值仿真結果進行對比,結果如圖3所示。圖中:CL為升力系數,α為迎角。在部分迎角下,仿真結果與實驗數據存在差異,但是在總體上與實驗數據是一致的,能夠反映非定常流動時的氣動力變化趨勢。
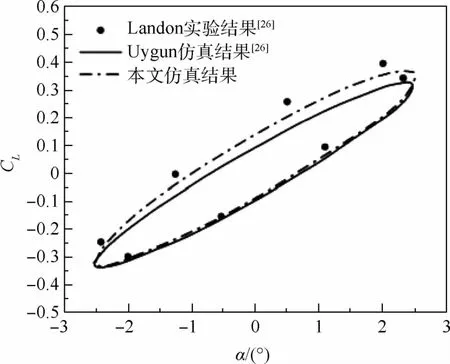
圖3 NACA0012翼型非定常升力系數仿真與實驗對比Fig.3 Comparison of simulation and experimental results of unsteady lift coefficient of NACA0012 airfoil
對于環量控制翼型而言,動量系數是影響環量控制中后緣射流控制效果的重要參數,升阻特性受動量系數影響較大,其定義為

式中:m˙為射流出口處的質量流量;Vjet為射流速度;ρ∞為來流密度;V∞為來流速度;S為二維翼型單位展長的面積,在數值上等于弦長c。假定氣流等熵膨脹至射流出口,遠前方來流靜壓為射流出口靜壓。通過調節射流出口速度,調節射流出口處的質量流量和動量系數。本文將使用上述參數作為后緣射流的邊界條件,調整參數以進行相關研究。對0°迎角下不同吹氣動量系數下的環量控制翼型進行數值模擬。計算條件為:來流速度為30 m/s,來流溫度為293.15 K,雷諾數為5×105,動量系數在0~0.06之間變化。將仿真結果與文獻[25]中的實驗數據進行對比,仿真采用穩態方法,結果如圖4所示,仿真結果與實驗數據基本吻合。綜上所述,本文采用的數值計算方法應當能夠較好地模擬環量控制翼型的非定常氣動力數據。
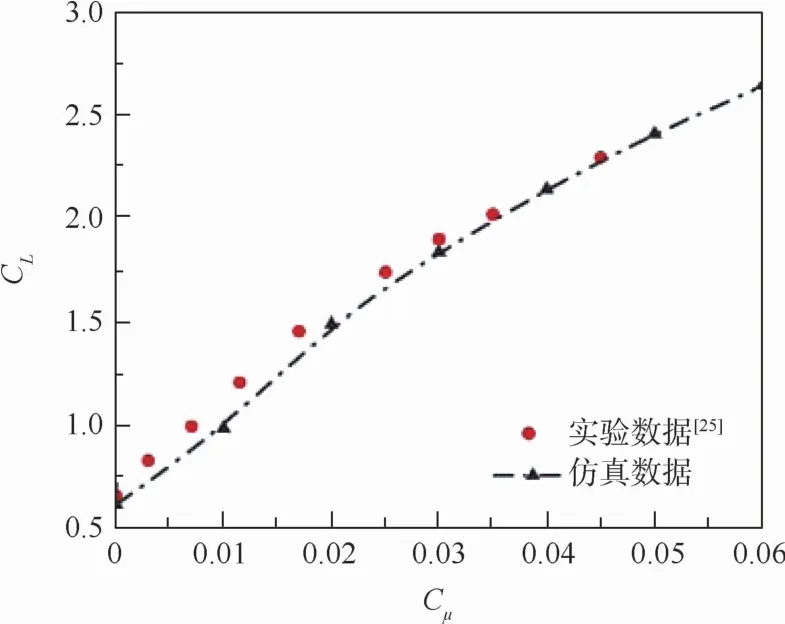
圖4 環量控制翼型升力系數仿真與實驗對比Fig.4 Comparison of simulation and experimental results of circulation control airfoil’s lift coefficient
2 定常氣動力插值
借助數值仿真或風洞試驗手段得到的翼型以迎角作為自變量的氣動參數往往具有極大的離散性和不完整性,因此,在進行氣動力和力矩建模時需要對離散的氣動力數據進行擬合或插值,使之成為光滑的連續函數。本節基于Kriging模型對定常狀態下的環量控制翼型氣動力進行插值處理,并與傳統氣動導數模型的預測精度進行對比。
2.1 K riging模型
Kriging模型最初是由南非采礦工程師Krige在1951年提出的一種空間估計技術,最初應用于礦床儲量計算和誤差估計,經過幾十年的發展,逐漸在地質、氣象、航空航天、汽車等領域得到發展和應用[27]。Kriging模型由于其卓越的非線性函數插值預測能力和誤差估計功能,正在受到越來越多的關注。
設m1,m2,…,mn為數量集上的一系列變量值。z(m1),z(m2),…,z(mn)為相應的參數值。則Kriging模型定義變量 m0處的插值結果z*(m0)為已知樣本值的線性加權,即

因此,通過求解加權系數λi就可以得到數量集中任意位置的參數估計值。關于Kriging模型的詳細介紹和推導參見文獻[27]。
影響環量控制翼型定常氣動力的主要因素包括迎角α和動量系數Cμ。仿真計算了α為-5°~15°,Cμ為0~0.06之間的氣動力參數。
環量控制翼型的氣動力參數呈現高度的非線性特征,迎角α和動量系數Cμ對氣動力的影響高度耦合,翼型失速與動量系數大小密切相關,動量系數越大,翼型失速迎角越小。以其氣動力參數可作為兩者的空間分布變量。選取樣本數量集α為-5°~15°,Cμ為0~0.06之間的離散氣動力參數。對樣本數量集進行歸一化后利用Kriging模型分不同方向進行函數計算,其預測結果和均方根誤差結果如圖5和圖6所示。
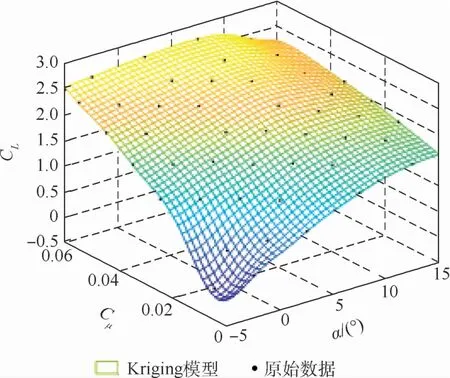
圖5 Kriging模型預測結果Fig.5 Prediction result of Kriging model
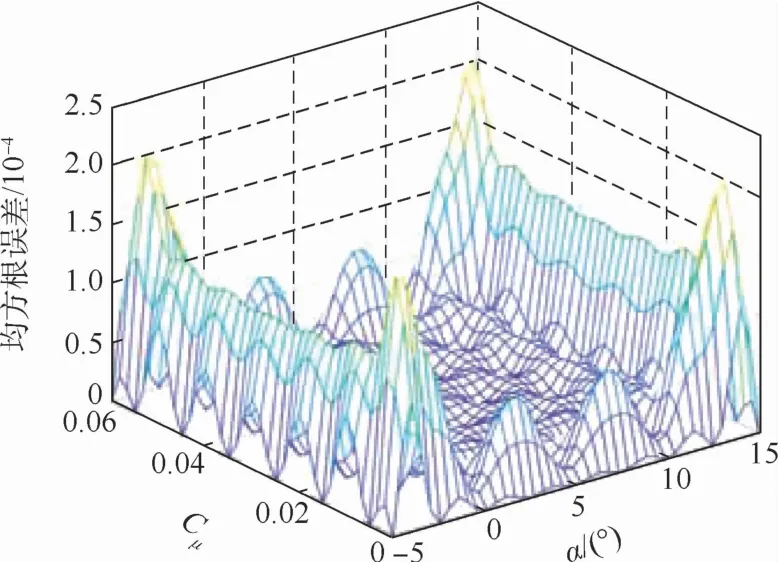
圖6 Kriging模型預測誤差Fig.6 Prediction error of Kriging model
從整體上來看,Kriging模型對于環量控制翼型的定常氣動力插值結果精度較高,特別是對于采樣點范圍內的內插結果誤差值低于1×104。對于邊界值誤差較高,這反映了模型對氣動力參數的外插能力需要進一步提高。Kriging模型能夠實現環量控制翼型氣動力參數設計的光滑連續插值,且具有較高的預測精度。
2.2 傳統氣動導數模型
傳統的氣動導數模型是基于線性疊加原理,假設氣動力可由飛行器迎角、舵面偏角、角速度等狀態變量線性疊加,其本質是氣動力的泰勒展開式分解后只保留其一階表達式,保留的各狀態變量系數分別被稱為氣動靜、動導數。對于定常氣動力而言,僅涉及氣動靜導數。為了提高氣動導數模型在大迎角非線性情況下的預測精度,一般采用高階展開式進行擬合,以升力系數為例可以表示為

將射流的影響分為兩部分:一部分設置為初始狀態量,包含在系數f0中,另一部分用于修正迎角帶來的氣動力影響,包含在系數f1和f2中。將系數fi設置為射流動量系數的三次多項式函數:

分別在不同的吹氣動量系數下驗證Kriging模型與傳統氣動導數模型的準確性,將2種模型的預測結果與CFD數值計算值進行比較,圖7給出了不同動量系數下2種模型的預測情況。
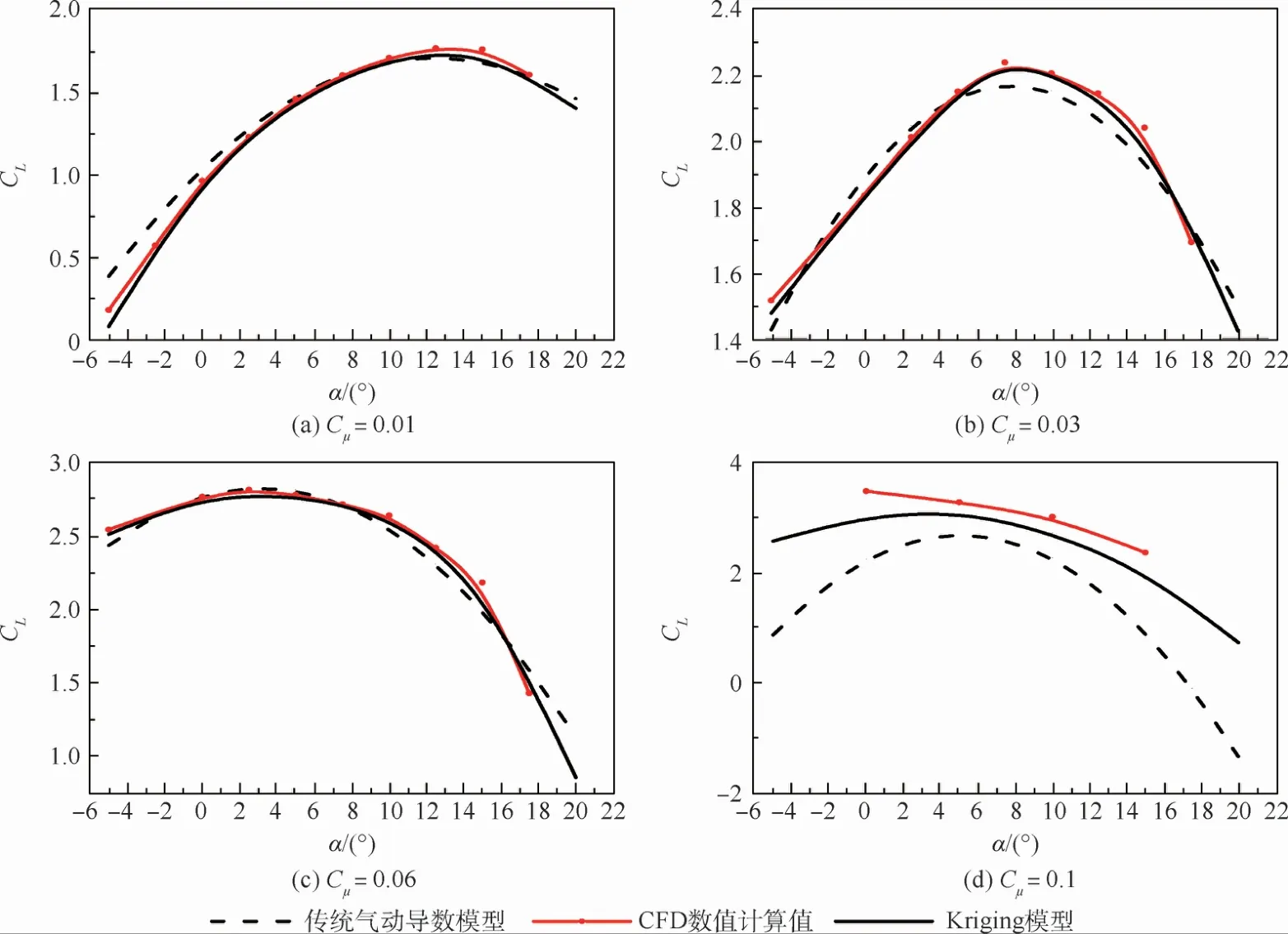
圖7 Kriging模型與傳統氣動導數模型對比結果Fig.7 Comparison between Kriging model and aerodynamic derivative model
從圖7中可以看出,在采樣范圍的動量系數(Cμ為0~0.06)作用下,Kriging模型較傳統的氣動導數模型預測精度有明顯提升,預測結果更加接近CFD計算值,并能準確預測失速迎角范圍;對于采樣范圍之外的參數,Kriging模型仍然能保持一定的預測精度,預測效果較傳統氣動導數模型有較大提升。
3 非定常氣動力建模
環量控制射流相較于傳統舵面而言可以大幅度提高翼型升力、改善升阻比,這使得環量控制飛行器往往在小迎角下就能夠獲得傳統飛行器在大迎角下的氣動力特性。因此,本文主要進行中低迎角(-5°~10°)下的環量控制翼型非定常氣動力建模。
3.1 環量控制翼型非定常氣動力模型
在機翼小振幅強迫振蕩風洞試驗中,若還未出現深動態失速現象,則根據小擾動假設,氣動力參數可以由高階線性狀態方程表示,包括定常和非定常兩部分[28]。其中定常氣動力反映了機翼振蕩過程中的氣動力快速響應部分,非定常氣動力部分則反映了機翼運動導致的流場內渦系移動產生的氣動力遲滯效應。已有的研究表明[29],環量控制射流通過改變翼型表面壓力分布、控制分離點移動而改變氣動力系數,這與迎角對氣動力系數的作用機理一致。對于環量控制翼型而言,動量系數與迎角共同影響翼型的氣動力系數,并且呈現高度耦合。以縱向運動為例,氣動力參數可以表示為

式中:Ci為氣動力力矩系數;Catt(α,Cμ)為氣流在附著流動的狀態下,即無分離假設下的氣動力系數;Cα˙att(α,Cμ)為機翼定常俯仰下的氣動力導數,為迎角變化率;Cdyn為非定常氣動力增量。
上述模型適用于尚未出現深動態失速時的氣動力系數變化情況,其中,Cdyn采用以下線性微分方程式表示:
式中:τ為非定常運動中的特征時間常數;Cst(α,Cμ)為實際定常狀態下氣動力系數,即Kriging模型預測值;ΔC(α,Cμ)為由于氣流分離導致的定常氣動力增量。
對于環量控制翼型而言,假設在迎角俯仰過程中射流動量系數不變,這種假設是合理的,目前對于傳統舵面飛行器在大迎角下非定常氣動力模型的建立也是基于舵面偏角不變的情況。
3.2 非定常氣動力模型參數辨識
借助經典的強迫振動法計算諧振運動過程中的非定常氣動力,強迫翼型繞重心做小幅度的俯仰振蕩,其迎角變化規律為

式中:Δα為迎角改變幅度。
非定常氣動力系數可以看做時間ˉt的連續函數,因此,可以將翼型小幅度俯仰振蕩過程中的氣動力系數變化按照減縮頻率進行傅里葉分解,以升力系數為例,保留一階形式可以表示為

式(10)表示了氣動力系數可類似于“小擾動”假設,由基準系數加上擾動系數構成。其中,C0(α0,Cμ0)表示中心迎角對應下的基準氣動力系數;Cα(α0,Cμ0,k)稱為同相導數;Cα˙(α0,Cμ0,k)稱為異相導數。
基于小振幅情況下的線性假設:

該假設表示在小振幅情況下實際靜態氣動力系數與氣流不分離假設下靜態氣動力系數之量與迎角變化近似呈現線性關系。ΔCα(α0,Cμ0)表示該差值與迎角變化之間的導數。
借助歐拉方程求解微分方程式(7),即求解下述方程組:
使用微分算子法容易解得方程組(12)的解,將式(8)、式(9)的迎角變化規律代入式(6)中,與式(10)的相關系數作對比后整理得到以下關系:
由上述推導可知,同相導數并不等同于靜導數,異相導數也并不等同于動導數。
但是當τ非常小時,此時同相導數和異相導數分別退化為傳統線性氣動導數模型的靜導數Cαst(α0,Cμ0)和動導數Cα˙att(α0,Cμ0),即如下關系式:

式中:Cα(α0,Cμ0)=Cαst(α0,Cμ0)。
此時,Cdyn(0)=0,C0(α0,Cμ0)=Cst(α0,Cμ0)。
τ定量地表征了翼型非定常氣動力效應的顯著程度。解式(13)可得

由于在同一中心迎角、不同減縮頻率對應下的同相/異相導數數據點落在同一條直線上,而直線的斜率則表示特征時間常數的負值:-τ。
對于某一特定中心迎角下的小振幅強迫振動數據而言,采用最小二乘法可得到對應中心迎角下的同相/異相導數數據點,部分數據點如圖8所示。
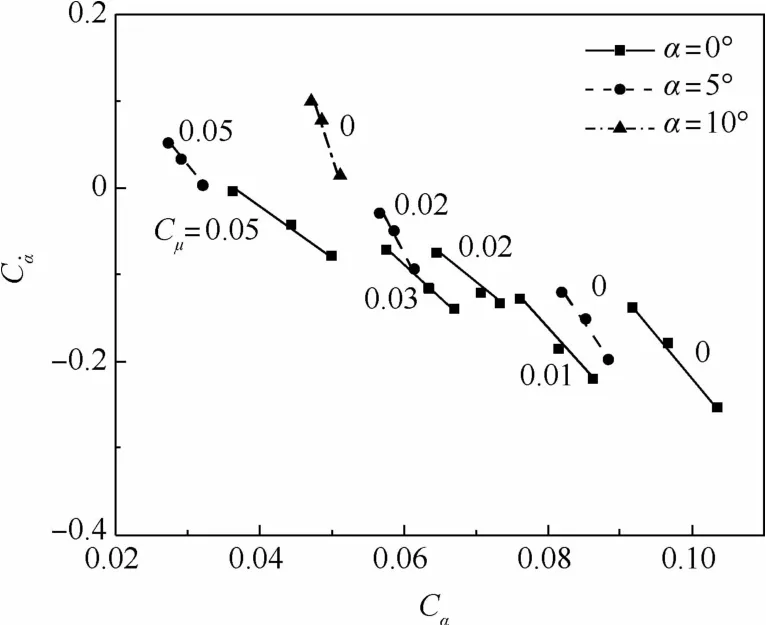
圖8 不同迎角、減縮頻率下的同相/異相導數Fig.8 In-phase and out-phase derivatives at different angles of attack and reduced frequencies
由上述分析可知,對于特定的小振幅流動狀態(特定的迎角和動量系數)下,τ是固定的,計算得到的不同中心迎角、動量系數下的特征時間常數如圖9所示。
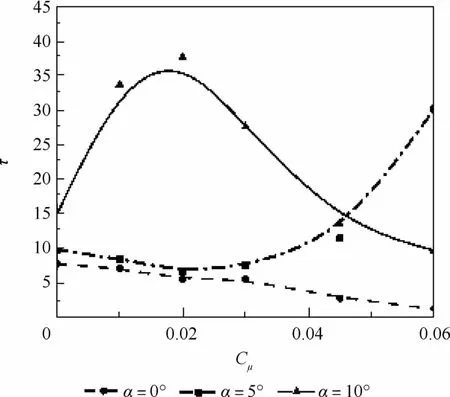
圖9 時間常數隨動量系數的變化曲線Fig.9 Variation curve of time constantwith momentum coefficient
特征時間常數值受迎角和動量系數影響較大。總體來看,τ隨Cμ增大呈現先降低后增加的趨勢,這說明低動量系數下,翼型的非定常氣動效應減弱,但是當動量系數增加到一定值后,翼型的非定常氣動力效應增強,并且隨著迎角的增大,該臨界動量系數逐漸降低。當α0=0°時,在全動量系數范圍內時間常數趨于0,氣動力模型可近似用傳統線性氣動導數模型代替。當α0=10°時,在全動量系數范圍內時間常數都較大,翼型處于臨近動態失速或失速后狀態,此時翼型的非定常氣動力特性主要由后緣渦系的遲滯運動導致,傳統線性氣動導數模型不再適用。
對于τ較小的情況,基于傳統線性氣動導數模型,使用不同迎角和動量系數下非定常運動的若干離散點,借助最小二乘法辨識靜導數Cαst(α0,Cμ0)和動導數Cα˙att(α0,Cμ0)。
對于τ較大的情況,由于無法使用傳統的線性氣動導數模型,在獲得τ(α,Cμ)后,仍需要辨識同相/異相導數中的Cαatt(α0,Cμ0)、ΔCα(α0,Cμ0)和Cα˙att(α0,Cμ0)。
為了便于描述,將式(13)用以下方程描述:
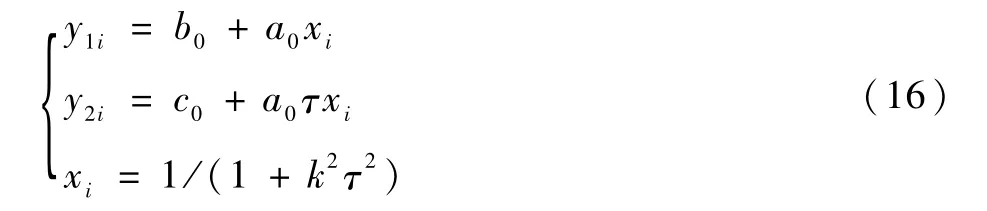
式中:y1i、y2i、b0、a0、c0分別為式(13)中的相關參數。為了辨識相關參數,引入以下誤差函數:
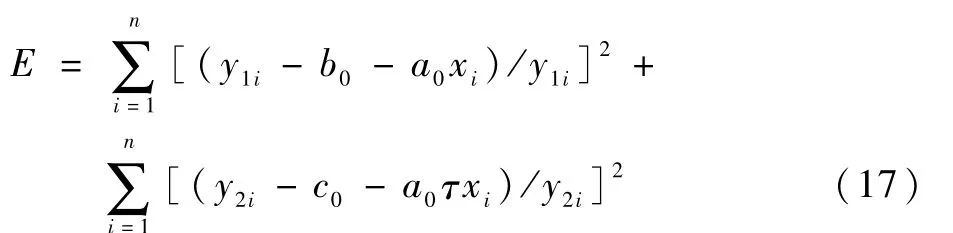
式中:n為同一中心迎角和動量系數、不同頻率下的仿真實驗次數;y1i和y2i分別為特定小振幅流動狀態下的同相/異相導數;b0、a0和c0為參數辨識后的相應值。該方法的核心思想是兩步線性回歸法,即先根據非定常運動的離散點辨識得到y1i和y2i,再根據得到的y1i和y2i辨識b0、a0和c0。辨識過程中,因為存在中心迎角、動量系數、減縮頻率3個自變量,直接進行參數辨識需要耗費極大的仿真計算量,所以本節針對射流動量系數與迎角的相互作用特點,對b0、a0和c0做合理優化,提高計算效率。
對于b0而言,Jones[25]曾指出動量系數對氣動力的影響呈現2個比較明顯的線性階段,其流動狀態滿足無分離假設,因此在低動量系數下b0可以用以下關系式代替:

式中:CαCμst(α0)為Cαst(α0)對Cμ的導數,可直接由Kriging模型插值得到,待辨識參量變為迎角。采用這樣的簡化方法在低迎角線性階段可直接退化為Cαst(α0,Cμ0),與無分離情況下的氣動導數一致。
對于c0而言,當自由來流不發生變化時,迎角俯仰導致翼型表面產生繞重心的旋轉速度,與外流相對流動產生下洗效應,而后緣射流并不會直接隨著翼型俯仰,而是由于后緣壓力場的變化時刻處于動態平衡之中。由定常旋轉產生的準定常氣動力增量主要在小迎角時起作用,與迎角變化率近似呈線性關系。在較大迎角范圍內,其引起的準定常氣動力增量遠小于非定常氣動力增量。將動量系數作為修正參數,可以將c0表示為

對于a0而言,a0=Cst(α,Cμ)-Catt(α,Cμ),因此只需辨識b0即可。在辨識得到τ和ΔC(α,Cμ)后,根據非定常氣動力增值周期性變化的特性,即Cdyn(0)=Cdyn(2π/ω),即可求得初值Cdyn(0)。
以誤差函數E最小為優化目標函數,以升力系數為例,得到的Cαatt(α0,Cμ0)曲線如圖10所示。
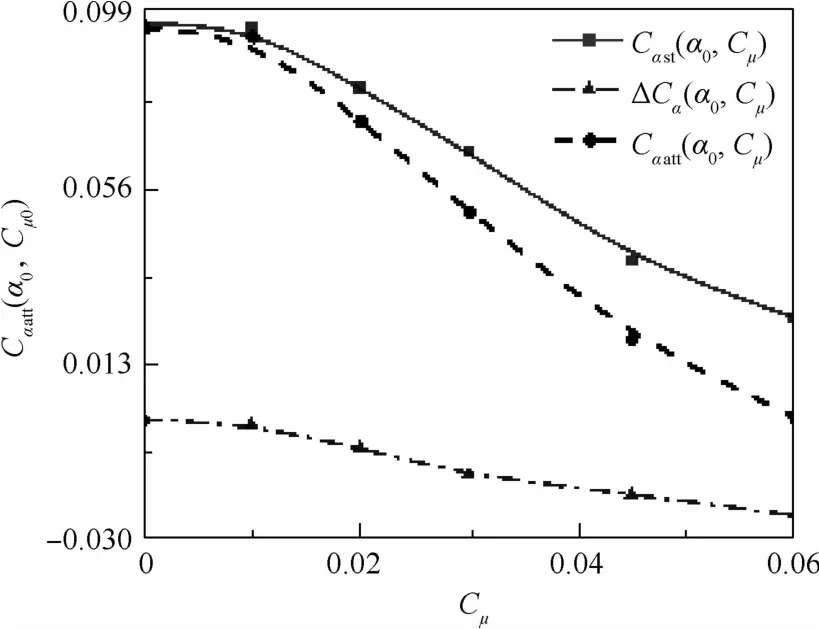
圖10 Cαatt(α0,Cμ0)的辨識結果Fig.10 Identification results of Cαatt(α0,Cμ0)
3.3 非定常氣動力模型與仿真數據對比驗證
為了驗證上述非定常氣動力模型的準確性,分別對環量控制翼型在不同迎角、動量系數、振幅下的預測結果進行對比分析。預測結果取升力系數CL和俯仰力矩系數Cm進行對比分析。計算條件為:來流速度為30 m/s,來流溫度為293.15 K。中心迎角、動量系數、振幅、減縮頻率驗證如圖11、圖12所示。
如圖11所示,為了得到非定常氣動力模型對大振幅情況下的預測結果,將大振幅的流動情況分段處理,每一段的氣動力變化情況都可以用小振幅情況下迎角對應的同相/異相導數表示,分段處理后可以將大振幅情況下的預測結果近似表示為
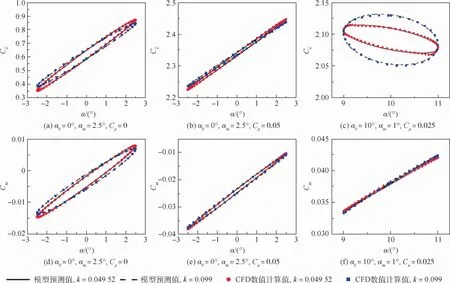
圖11 小振幅流動狀態下結果對比Fig.11 Comparison of results under small-amplitude flow

將分段處理的αm取為1°,得到非定常氣動力模型對于大振幅情況下的預測結果,如圖12所示。
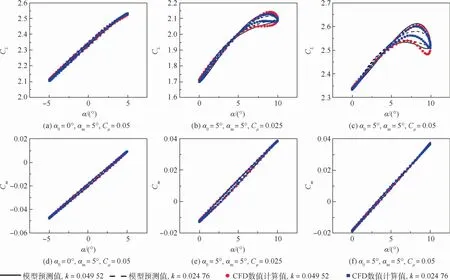
圖12 大振幅流動狀態下結果對比Fig.12 Comparison of results under large-amp litude flow
可以看出,對于升力系數而言,線性非定常氣動力模型對小振幅情況下流動狀態有較好的預測精度,特別是在0°迎角下,此時升力系數線性特征明顯,在較大振幅情況下(見圖11(a)、圖11(b))也能夠取得較好的預測精度。但是在較大迎角、較高動量系數的流動狀態下,如圖12(c)所示,此時升力系數非線性特征明顯,線性非定常氣動力模型難以取得較高的預測精度。對于俯仰力矩系數而言,線性非定常氣動力模型在各個動量系數下都能較好地預測力矩系數變化趨勢。這是因為俯仰力矩系數主要受翼型上表面分離渦影響,當翼型上表面分離渦移動時,對應的負壓區逐漸擴大或者縮小,導致俯仰力矩系數變化。高動量系數下翼型上表面不再分離,導致遲滯效應逐漸減弱。值得一提的是,在出現動態失速分離前,高動量系數具有減弱氣動力遲滯效應的優勢,如圖11(f)、圖12(f)所示,此時俯仰力矩的變化幾乎不存在遲滯效應,與定常狀態下的變化幾乎一致。在出現動態失速后,同樣能在線性小迎角階段減弱遲滯效應,如圖12(b)、圖12(c)所示。
3.4 非定常氣動力模型非線性修正
當振蕩幅度增大并出現深動態失速的情況時,上述線性非定常氣動力模型將會在失速段失去預測精度。這是因為在大振幅情況下進行分段處理完全忽略了洗流時差的累計效應,在非線性較為明顯的階段將完全喪失其預測精度。為了改善非定常氣動力模型在動態失速情況下的預測精度,采用文獻[30]的方法將非定常氣動力增量式(7)改寫為以下非線性形式:

式中:ki(α,Cμ)=1/τi(α,Cμ),該方法采用多次逼近的思想,避免了大振幅過程中僅用單一時間常數τ線性表示增量的誤差,同時充分考慮了累計效應。利用上述線性非定常氣動力模型辨識得到的Catt(α,Cμ)和Cα˙att(α,Cμ),可以獲得線性假設下CL的變化,與實際CL的差值即非定常氣動力增量,與線性假設下得到的Cdyn相疊加即實際情況下的Cdyn,保持ΔC(α,Cμ)和k1(α,Cμ)不變,利用最小二乘法即可辨識得到ki(α,Cμ),采用這樣的假設能夠有效降低參數辨識的難度。
上述線性非定常氣動力模型已經能夠滿足無射流情況下中低迎角的大振幅預測精度,因此,非線性項主要用來提高高動量系數情況下的預測精度。為了提高辨識效率,本文僅對包含Kriging模型中靜態失速點附近的流動狀態進行參數辨識。采用三次非線性形式描述非定常氣動力增量,辨識得到的k2(α,Cμ)和k3(α,Cμ)如圖13所示。
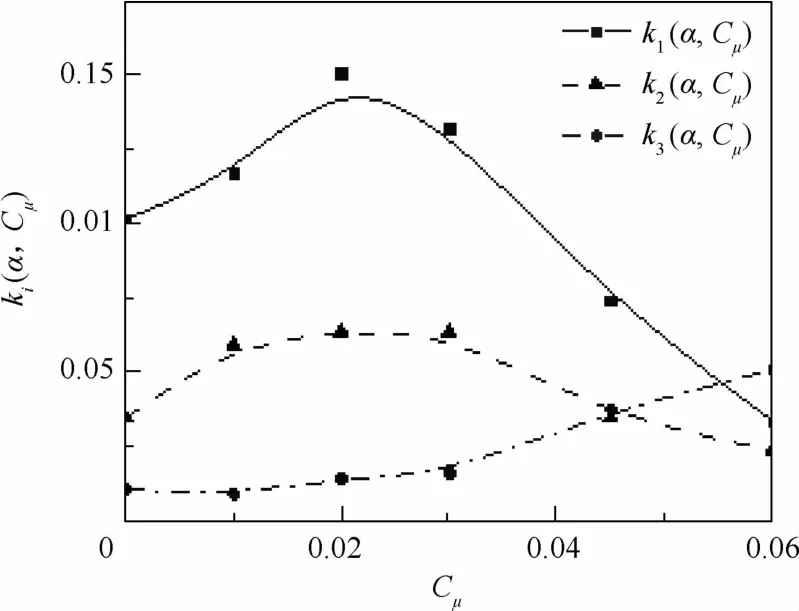
圖13 ki(α,Cμ)辨識結果Fig.13 Identification result of ki(α,Cμ)
非線性項修正后的非定常氣動力模型進行大振幅流動情況下的升力系數預測,結果如圖14所示,其結果較線性模型有明顯提升。
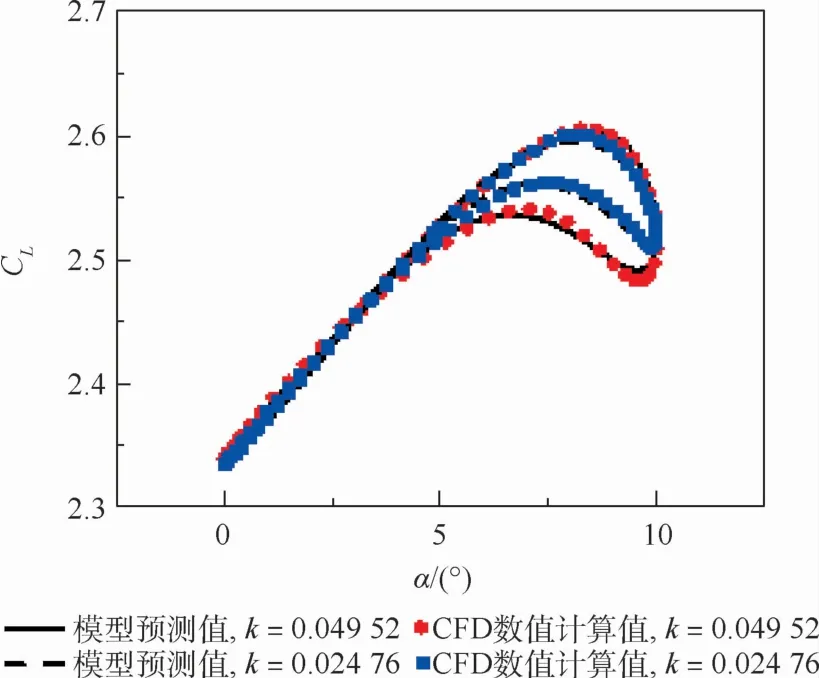
圖14 非線性非定常氣動力模型結果對比(Cμ =0.05)Fig.14 Comparison of results of nonlinear unsteady aerodynamic models(Cμ =0.05)
4 結論
本文主要進行了環量控制翼型非定常氣動力的建模,通過上述分析,可以得到以下結論:
1)基于Kriging模型完成了環量控制翼型的定常氣動力插值,能夠精確的反映其定常氣動力變化,插值精度要優于傳統氣動導數模型。
2)基于微分方程模型,通過添加射流參數源項,完成了適用于環量控制翼型的線性微分方程建模。對Cαatt(α0,Cμ0)和Cα˙att(α0,Cμ0)等參數簡化處理,提高辨識效率。
3)對高動量系數情況下的非定常氣動力模型進行非線性修正,能夠較為準確的反映不同動量系數下的非定常流動特性。
4)對于升力系數而言,線性非定常氣動力模型能夠滿足小振幅和低動量系數下大振幅流動狀態;對于俯仰力矩系數而言,線性非定常氣動力模型能夠滿足大部分流動狀態。
環量控制翼型的非定常氣動力耦合特性復雜,仍需要在以下方面進一步研究:①高動量系數下缺乏足夠精度的數學模型來描述后緣渦的分離變化,需要對流場特性進行更深入的研究,進而優化模型結構。提高在高動量系數下非線性非定常氣動力模型預測效果。②關于環量控制翼型的非定常氣動力建模研究仍處于起步階段,如何有效的結合已經較為成熟的大迎角非定常氣動力數學模型是未來研究的途徑之一。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19