基于FPSO的小天體著陸系統陸標選取方法
2021-11-18 04:08:48冀紅霞雷擁軍
計算機仿真 2021年1期
冀紅霞,宗 紅,雷擁軍,2
(1. 北京控制工程研究所,北京 100190;2. 空間智能控制技術重點實驗室,北京 100190)
1 引言
采用陸標圖像信息的小天體著陸自主導航方法是實現未來深空探測精確著陸任務的重要手段之一。近年來,采用陸標圖像信息的小天體著陸自主導航方法的研究受到越來越多的關注。目前對于這一類導航方法的研究大都是在已知陸標位置信息的假設下進行的。著陸器通過將下降圖像中提取的陸標與探測器事先存儲的包含陸標位置信息的全局地圖進行匹配從而獲得下降圖像中陸標的位置信息,進而利用這些已知陸標的位置信息結合其圖像測量信息計算著陸器的導航信息[1,2],因此陸標的分布數量與分布結構對自主導航的精度有很大的影響。目前來看,采用陸標圖像信息的行星著陸自主導航方法大都沒有考慮導航陸標的選取問題。然而,在移動機器人導航領域,研究人員從多個方面對陸標選取問題進行了研究。文獻[3,4,5]則從陸標的空間構型對移動機器人位姿估計精度的影響方面研究了導航陸標的選取問題。文獻[4]提出了一種利用粒子群算法來規劃多陸標情況下的機器人導航。
粒子群優化算法(Particle Swarm Optimizer,PSO)[6]是Kennedy和Eberhart于1995年提出的一種群體智能仿生算法,在解決一些典型的函數優化問題時,能夠取得比較好的優化結果。雖然粒子群算法具有容易實現、計算簡單、收斂快、魯棒性好等優點,但是后期容易陷入局部最優解,收斂效率低。
很多學者通過一些方法和手段來調整慣性權值[7,8],使算法在全局搜索和精細搜索之間達到平衡,但改進算法只是單純地在整個區間上使用一次函數、二次函數甚至更高次函數,以及正(余)弦函數等三角函數、各種指數和對數形式的函數,構造出非常復雜的減函數。增加計算機運算量,降低改進算法的優化速度。
針對粒子群算法容易陷入局部最優的問題,提出一種模糊邏輯規則的粒子群(Fuzzy Particle Swarm Optimizer, FPSO)算法,采用模糊邏輯規則對粒子群算法中慣性權值進行動態調整,以平衡全局搜索速度和局部搜索速度,并以陸標的空間幾何精度因子(GDOP)為適應度值以提高導航精度,學習選取使陸標構型的GDOP值最小的陸標集值作為導航觀測信息,通過仿真驗證分析選取不同導航陸標數據點對系統導航精度的影響。
2 小天體著陸自主視覺導航系統
小天體探測器在著陸過程中通過相機獲取小天體表面圖像,采用圖像匹配算法提取陸標特征點作為后續導航的觀測信息,圖1為采用陸標提取方法的小天體著陸自主導航系統流程圖,首先采用角點檢測算法檢測下降圖像中的特征點作為陸標,對下降圖像進行尺度估計和尺度變換,對提取出的角點信息特征描述后進行初始匹配,并剔除初始樣本中不符合幾何特性的部分外點,最后與數據庫中存儲的全局圖像進行匹配,輸出匹配的陸標點位置信息,參與后續的導航濾波解算。
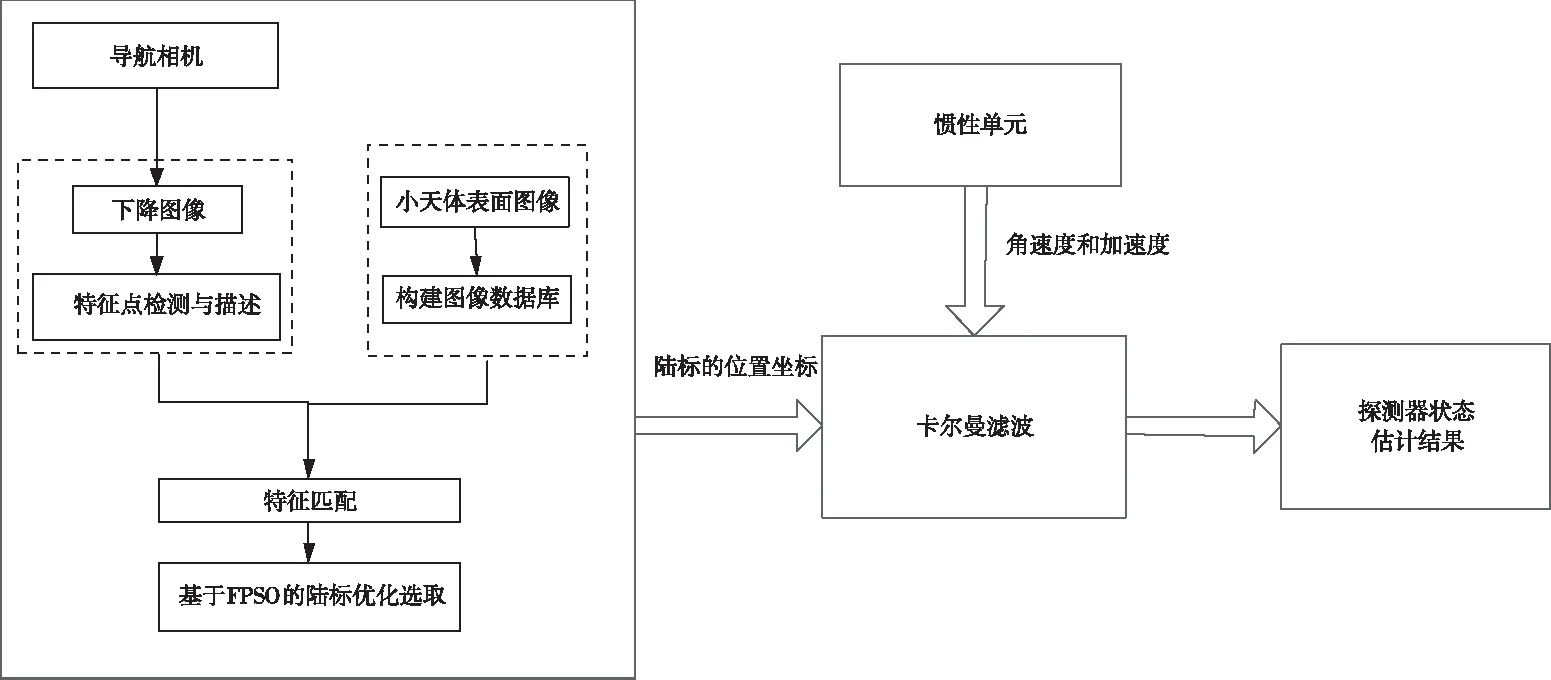
圖1 小天體著陸自主導航系統流程圖
2.1 小天體探測器運動學模型
利用慣性敏感器測量建立探測器著陸運動學方程為
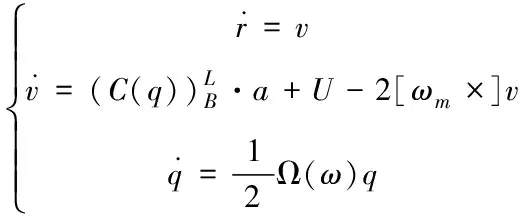
(1)
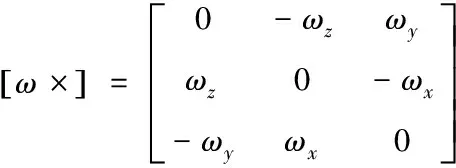
Ω(ω)定義如下
其中
2.2 小天體探測器測量模型
2.2.1 IMU測量模型
假設IMU固連于著陸器體坐標系,可直接敏感著陸器相對于慣性空間的角速度和非引力加速度。則加速度計和陀螺的測量模型分別表示為
(2)
其中,ba和bw分別為加速度計零偏和陀螺零偏,a為除引力外所有作用于探測器上的合力產生的加速度:na、nw分別是加速度計和陀螺測量噪聲。
則導航測量方程為

探測器在著陸點固連坐標系下的狀態參數為(r,q),著陸點固連坐標系下第i個特征點的位置矢量為Lpi, 探測器到第i個特征點的位置矢量在相機坐標系下的表示為

(3)
假設光學導航相機模型為理想的小孔成像模型,由射影變換可得
(4)

是的,他覺得自己會下地獄。云浮人認為,每一個命喪野獸口中的人,靈魂都已被污染,再也無法升上天空飛翔。他在心中發出一聲悲嘆,自己與任何一個族人相比,都更加渴望天空,然而到頭來,卻終究是下了地獄。

(5)
2.2.3 測速敏感器測量模型
測速敏感器輸出的相對速度的測量方程如下:

(6)
對于導航相機,以特征點在像平面的位置為觀測量,對于特征點由式(5)可得觀測方程為
中華傳統文化是世界文化之林中的一道獨特風景,在寬廣遼闊的祖國大地上,風情各異的地方節慶對于傳承豐富多樣的傳統文化,具有突出的作用。在國家大力進行社會主義文化建設之際,深入探討地方節慶對傳統文化的傳承價值,是非常有必要和有意義的。筆者擬以海南軍坡節為例,對這一問題進行深入探討。
3 FPSO的導航陸標選取
粒子群算法(PSO)初始化為一群數量為N的隨機粒子(隨機解),在D維空間中通過重復迭代,更新自身的位置以搜索適應度值的最優解。在每次迭代中,粒子通過2個“極值”來更新自己的速度和位置:一個是粒子自身目前所找到的最優解,即個體極值;另一個是整個粒子目前找到的最優解,即全局極值。粒子i(i=1,2,…,N)在第j(j=1,2,…,D)維的速度vij和位置xij按如下格式進行更新。
(7)
式中,w為非負數,成為慣性權值(慣性因子),描述了粒子對之前速度的“繼承”;c1和c2為非負常數,稱為學習因子(加速因子),體現了粒子的社會性,即粒子向全局最優粒子學習的特性;r1和r2為(0,1)之間的隨機數;pi=(pi1,pi2,…,piD)表示粒子i的個體極值所在位置;pg=(pg1,pg2,…,pgD)表示所有粒子的全局極值所在位置。
其中,H為導航濾波器的觀測矩陣。
在粒子群算法中,每個優化問題的潛在解都是在搜索空間中的粒子,所有粒子都有一個被優化的函數決定的適應度值(fitness value),每個粒子還有一個速度決定其尋優的方向和距離。
3.1 模糊邏輯規則慣性權值的選取
慣性權值表示粒子對其原始速度的繼承狀況,控制其取值大小,可調節PSO算法的全局與局部尋優能力。w值較大,全局尋優能力強,局部尋優能力弱,反之,則局部尋優能力增強,而全局尋優能力。因此在算法進行過程中,通過一些方法來調整慣性權值,使算法在全局搜索和精細搜索之間達到平衡。
應用綠色建筑設計的理念最重要的就是選用節能的設計方法進行建筑設計,首先就要注重建筑的朝向角度,這是房屋設計的重點,需要結合節能技術進行有效分析。目前,設計者要考慮和建筑的高低以及使用功能的不同,不同功能建筑所需要的日照時間是不一樣,所以設計者要合理把控樓體之間的關系,具體可以對樓間距、日照時間、角度等進行科學的計算,還要考慮到建筑所在地理位置的經緯度和太陽高度角及方位角的問題,從而使大部分的房屋能夠得到充足的日照,盡量設計出南北通透的房屋。
為了使得PSO算法在迭代計算的前期有較好的全局搜索能力而后期具有較好的局部搜索能力,設計一個具有模糊邏輯規則控制PSO算法參數的FPSO(Fuzzy PSO),以適應度本次與上次之差和迭代次數作為輸入變量,將慣性權值w作為輸出變量。為了便于計算,對迭代次數與適應度差值這2個模糊系統的輸入變量進行處理。
在模糊系統中兩個模糊輸入變量K1和K2與模糊輸出變量w分別由3個三角形隸屬度函數與5個三角形隸屬度函數確定,即將模糊輸入的范圍平均分成3個模糊集(L:低;M:中;H:高),輸出的范圍平均分成5個模糊集(L:低;M:中;H:高;ML:中低;MH:中高),分別如圖2中a)、b)所示。
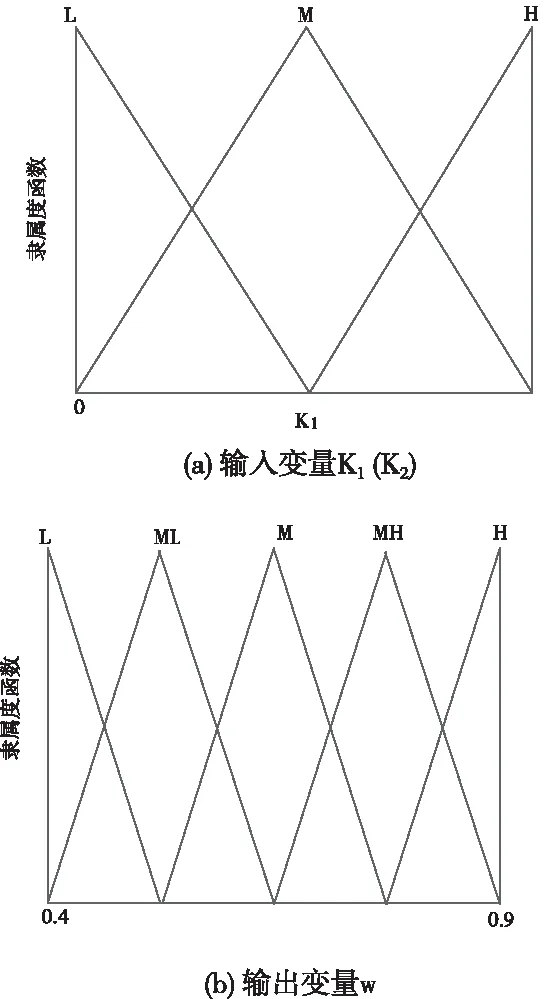
圖2 隸屬度函數
輸入變量K1和K2如式(8)和(9)所示
隨著我國政府會計改革的不斷深入推進,2017年10月24日,財政部印發《政府會計制度—行政事業單位會計科目和報表》(財會〔2017〕25號,以下簡稱《政府會計制度》),要求自2019年1月1日起全面施行,并鼓勵行政事業單位提前執行。《政府會計制度》構建了“具備財務會計與預算會計雙重功能,實現財務會計與預算會計適度分離并相互銜接”的全新政府會計核算模式,對會計科目的設置使用和報表格式及編制進行了詳細說明,同時在附錄中列示了主要業務和事項賬務處理舉例。
K1=k/kmax
(8)

(9)
導航系統狀態包括探測器當前位置、速度和姿態以及成像時刻探測器位置和姿態,即
結合粒子群算法在短暫的迭代前期收斂速度快,而在漫長的迭代后期則基本陷于停滯狀態以及系統迭代總體收斂的特點,分析輸入與輸出之間的關系如下:
1) 在迭代前期即K1值較小時,取w較大的值以利于全局搜索,在迭代后期即K2值較大時。取w較小的值以利于局部搜索;
2) 當K2<0時,說明此次迭代總體收斂,且K2越小,w越大,此時全局搜索能力強;當K2>0時,說明此次迭代發散,且K2越大,w越小,此時局部搜索能力強。
根據上述輸入輸出參數關系,制定模糊邏輯規則如表1所示。
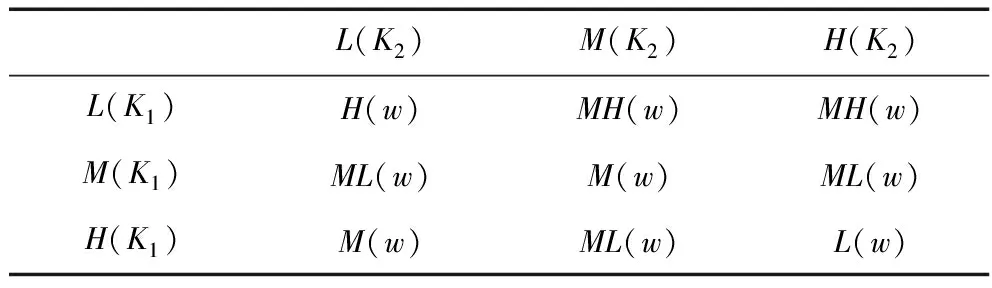
表1 模糊邏輯規則
在表1中,每個規則都是一個“if…then…”的形式。對于不同的問題,可以合理選取w的取值范圍,w的取值范圍為[0.4,0.9]。
3.2 空間幾何精度因子適應度指標的選取
導航陸標特征點信息很大程度上決定使用陸標觀測信息作為觀測量的自主導航系統的精度。通常來說,當導航陸標數據庫包含陸標個數越多,著陸器獲得的可用于導航的測量信息就越多,相應地著陸器狀態估計精度也越高,相應地著陸器精度也越高。然而,受限于著陸器上有限的存儲和計算能力以及著陸過程自主導航對實時性的要求,可存儲陸標數據庫大小是有限的,因此,需要從所有可用陸標中選取出最優的那部分陸標組成導航陸標數據庫,則導航陸標選取問題可描述為尋找既能滿足系統導航性能要求又包含最少陸標個數的陸標集。
對于使用陸標選取作為觀測量的小天體著陸自主導航系統,使用陸標點的空間幾何精度因子(GDOP)值作為導航性能指標,在衛星導航系統D中,GDOP用于衡量導航精度的數值,它表示定位誤差與空間衛星星座間的幾何位置變化關系。更一般的說,是用來表示定位誤差放大倍數或者是精度衰減因子。在實際情況中,陸標點組成的體積越小則GDOP的值越大。在選擇陸標時要選擇陸標分散在不同的位置,且在不同的區域都有分布,陸標的幾何精度就會變小,從而提高導航系統的精度。
GDOP的計算公式如下

(10)
水利普查檔案應該按要求建立歸檔文件材料的案卷和文件級目錄及重要文件材料全文數據庫,并依托相應的管理系統,逐步推進水利普查檔案信息化管理,滿足各項工作對水利普查檔案的利用需求。
當陸標個數較多時,采用全局搜索方法尋找優化的導航陸標時非常困難的,因此考慮以圖1中特征匹配提取出的陸標為初始點,采用模糊規則的粒子群算法,在一定的邊界范圍內通過選取空間精度因子(GDOP)值為適應度指標進行學習,在一定迭代周期內,更新陸標點的位置搜索使得適應度值最小的陸標點,作為導航濾波器的觀測值。
4 小天體探測器自主導航算法
4.1 狀態方程
式中,k為當前迭代次數,kmax為總迭代次數;fitnesscurrent為當前時刻的最優適應度值,fitnesslast為上一時刻的最優適應度值。

(11)
2.2.2 導航相機測量模型
估計狀態為
提高教師素質,豐富教學內容 教師是傳播知識的關鍵環節,具有很強的示范作用,要率先垂范,上課不使用手機,為學生樹立良好的榜樣。教師可以通過課程環節設計,用適當的教法解決較難課程內容,選擇合適的教學方法和手段來授課,理論與實際相結合,增加課堂上的實踐性、趣味性、靈活性,通過豐富課堂內容,增強課堂吸引力,讓學生在一個輕松的環境中學習。教師通過自己尊重教學、課堂、學生的良好教學態度,從而去影響學生、帶動學生,這種示范作用對學生具有立竿見影的效果,從而使學生上課沒有時間玩手機。

(12)
系統當前誤差狀態方程如下
(13)
假設k時刻相機拍攝一幅圖像,則狀態方程xE|k和協方差PEEk|k分別擴維為xk和Pk|k
(四)防治 對于生豬霉玉米黃曲霉素中毒到目前尚無特效解毒藥。臨診中僅限于對癥處理并加強肝臟解毒功能。首先是立即停喂霉爛變質飼料和可疑料,其次是根據臨床癥狀采取一些解毒措施,如應用中藥輕瀉,促使病豬采食后的霉飼料盡快排出體外,同時注射肌苷、柴胡保肝,用維生素E和高滲葡萄糖輸液。對部分出現心力衰竭的豬只用安鈉咖注射液強心。并注意控制繼發感染。全天用5%板藍根漿飲水,連飲3~5 d。飼料中添加抑霉菌素3~5 d,增加蛋白質和脂肪含量可增強豬體對黃曲霉毒素的抵抗力并減少死亡率。也可發病時用三苯甲咪唑按20 mg/kg口服,日服三次,連用數天可治療本病。
式中
4.2 觀測方程
式中,nu為測速敏感器測量噪聲。
式中,vi為觀測噪聲,設其協方差陣為Rv。
第i時刻導航陸標pj估計觀測量為
(14)
則第i時刻的觀測量殘差為
yi=Zi-i
(15)
測量方程為
(16)
式中
考生還應熟練掌握邊敘邊議的論證技巧,也即在敘述的過程中靈活自如地進行分析論證。這樣的論證技巧尤其適用于考生對該論據較為熟悉而且覺得一兩句話概括起來較為困難的情況。當然,邊敘邊議的論證技巧決不是意味著論證可以拖沓,而是將問題說得更深入透徹些,在論證過程中還是要講求層次分明、條分縷析。
其中
對于測距測速敏感器,由(6)可得觀測方程為
(17)
其中測量敏感矩陣為

其中
(2)皮帶運輸系統。其中進煤皮帶3條(高空皮帶1部,斜巷大傾角皮帶1部),中煤皮帶1部,矸石皮帶2部,精煤皮帶1部,共計7部皮帶。精煤轉載皮帶由原煤場篩分3#皮帶延伸共用。
5 仿真驗證
為驗證本文提出的采用粒子群算法的陸標選取導航系統的有效性和可行性,取Eros433作為目標天體進行數學仿真,小天體物理參數如表2所示。

表2 仿真分析參數列表
仿真初始條件為位置各方向存在50m的隨機誤差,速度各方向存在1m/s隨機誤差,姿態各軸指向存在1°的隨機誤差,導航陸標位置各方向存在1m的隨機誤差,測速儀各方向存在0.01m/s隨機誤差。設導航相機焦距偽3.5mm,導航相機和測速儀以1s的采樣間隔輸出,圖像處理精度為1個像素,仿真采用模擬陸標進行。
(1) 炭化花生殼:將洗凈烘干的花生殼粉碎后放入坩堝中,加蓋后置于馬弗爐中進行炭化,設置升溫梯度為100 ℃,間隔時間為10 min,待溫度分別升至300,400,500,600和700 ℃時,繼續炭化2 h,隨后冷卻至室溫取出,稱重,備用。
1)適應度收斂分析
(4)基于GIS的選線工作輔助系統,其可靠性與計算結果準確性及現有數據信息有直接關系,同時也會受到用戶自身選擇與判斷的影響。只有正確的選擇與判斷,才能充分發揮工具應有的作用和效果。
利用FPSO算法計算陸標優化時,首先根據式(21)得到GDOP值作為適應度指標,并將式(21)作為適應度函數,通過FPSO算法對該適應度函數進行逐次迭代尋優。FPSO算法的計算步驟與2.1節PSO算法相同,只是通過模糊系統對慣性權值w進行動態調整,通過迭代尋優,最后得到的全局最優解即為適應度指標,所對應的陸標位置為陸標最優值。

圖3 適應度收斂曲線
從圖3的收斂度曲線可看出,FPSO計算最終的適應度值收斂最小值優于PSO算法。
2)導航精度分析
仿真情況1:全部陸標的300個點

圖4 仿真情況1濾波精度
仿真情況2:全部陸標中的前200個
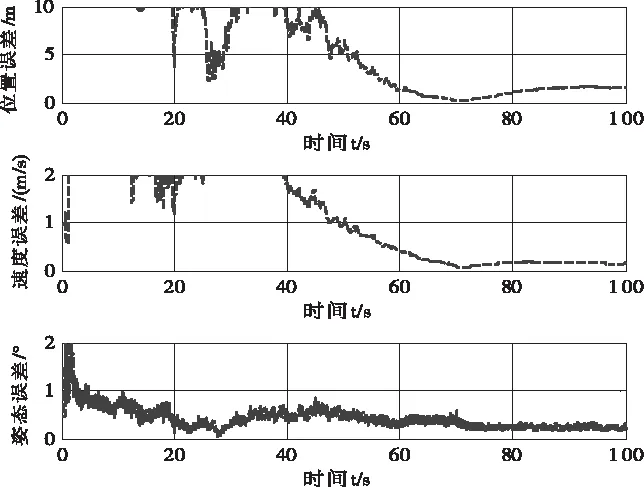
圖5 仿真情況2濾波精度
仿真情況3:隨機選取的100個陸標

圖6 仿真情況3濾波精度
仿真情況4:FPSO選取的陸標
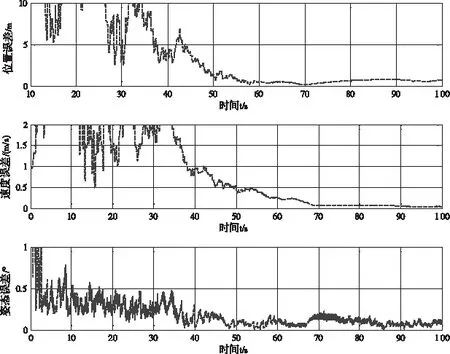
圖7 仿真情況4濾波精度

表3 不同陸標個數下蒙特卡羅導航誤差
從圖4~圖7及表3可看出,FPSO生成的陸標(仿真情況4)在參與導航解算時相較仿真情況一濾波精度提高了35.6%,相較仿真情況三消耗的時間減少了47.8%,這是由于FPSO智能選取陸標點時以GDOP值為適應度值,不斷迭代生成GDOP值最優的陸標點,且可以使用較少的粒子數參與導航解算,減少導航運算的時間。
我國制定了很多關于基層畜牧獸醫技術管理的法律法規,而且由于基層的設施條件存在欠缺,就使得工作落實非常困難。而我國正面臨著經濟體制改革的時期,畜牧業在這個過程中也面臨著多層次的體制改革。目前也有部分地區實現了良好的規劃和發展,但相對來說這些情況大多發生在大城市里;而對于基層來說實施落實依然是非常困難的問題。例如,基層畜牧獸醫治療設備就難以企及大城市中獸醫的治療設備,這是客觀存在的問題。而且大多數基層畜牧業仍然處于原始放養的狀態,難以進行系統化的管理,自然也就無法將先進的理論概念進行傳導,非常不利于基層畜牧業的系統發展。
6 結論
本文所提出的FPSO算法模糊邏輯規則對標準PSO算法中的慣性權值參數進行了改進,并將該算法應用到小天體探測器著陸陸標優化選取,通過仿真結果驗證:
2)培訓內容:醫院歷史沿革及文化建設、黨團工作介紹、醫院感染控制及醫務人員職業防護、工資福利和考核、心肺復蘇、消防安全、醫療核心制度和醫患溝通、住院醫師規范化培訓及考核和護理專項培訓。培訓時間共計為5個工作日。
1)利用模糊邏輯規則很好地權衡標準PSO算法的探索能力和開發能力。在迭代計算早期擴大搜索范圍,在迭代后期加速收斂性能;
2)在與其它陸標選取方法比較的基礎上,采用優化的陸標參與導航解算的相較全部陸標具濾波精度提高了35.6%,相較隨機選取陸標時間減少了47.8%。
