基于虛擬樣機技術的某型擺臂機構研究
2021-11-18 04:09:06劉大慶邱群先
計算機仿真 2021年1期
劉大慶,李 偉,邱群先
(中國船舶重工集團公司第七一三研究所,河南 鄭州,450015)
1 引言
艦炮作為海軍的主戰武器,在海戰中發揮著不可替代的作用。作為傳統武器系統,艦炮對自動化程度和可靠性要求很高,其發射系統及供補彈技術一直是研究的重點和難點所在,供彈系統的性能好壞對艦炮的綜合性能指標有著很大的影響[1]。目前世界中大口徑艦炮供彈系統大都已經實現自動化,擺臂機構作為供彈系統的中間環節,在整個供彈路徑中起到了非常重要的作用,也廣泛應用于國內外中大口徑艦炮的供彈系統中。
虛擬樣機技術(Virtual Prototyping Technology,VPT)是一項新生的工程計算方法。采用計算機仿真與虛擬技術,在計算機上通過CAD/CAE/CAM等技術把產品的資料集成到一個可視化的環境中,實現對產品的仿真、分析[2]。對于復雜的動力系統,如果采用傳統的研究模式,不僅耗費大量時間,而且具有很大不確定性,非常有必要借用虛擬樣機技術來進行檢驗和模擬[3]。
某型艦炮的擺臂機構在設計時采取外置電機作為動力源,通過電機帶動齒輪齒條,由齒條推動連桿帶動擺臂擺動,完成彈藥的交接。電機作為動力源,其動力傳輸到擺臂過程中經過幾次動力轉換和傳遞,最終控制擺臂按照預定的軌跡運動,傳統的曲柄連桿機構計算方法在分析擺臂的運動過程中遇到較大困難,這種計算方法對電機的設計及控制所能提供的指導作用很有限[4]。因此,本文中采用MATLAB和ADAMS軟件聯合仿真,將虛擬樣機技術應用于擺臂機構的計算仿真,通過仿真計算得到擺臂和電機的動力學特性曲線,重點關注擺臂電機的輸出功率和扭矩,為電機的設計以及控制過程提供參考[5]。
2 擺臂機構模型建立及運動規律
2.1 擺臂機構模型
擺臂機構主要功能組成為:擺臂,齒輪,齒條,電機等,其中驅動電機通過減速機和聯軸器帶動齒輪作圓周運動,齒輪推動齒條往復直線運動,齒條一端和擺臂連接,擺臂旋轉軸固定于艦炮高低回轉中心,齒條推動擺臂繞擺臂旋轉軸作擺動。擺臂接收到彈藥之后,通過電機的驅動,實現往復擺動來追蹤發射系統,最終實現彈藥的交接。擺臂機構的運動需要按照指定的軌跡擺動,在本文中通過MATLAB和ADAMS進行聯合計算,根據設定的擺臂運動,對電機的運動規律和齒輪齒條進行受力分析,為后續電機的設計工作提供一定的參考。

圖1 擺臂機構模型
2.2 擺臂機構運動規律
擺臂機構本身結構比較復雜,動力傳動過程比較繁瑣,因此需要對模型進行適當簡化,簡化后的擺臂機構如圖2所示。

圖2 擺臂機構簡化圖



在本例中,擺臂需要在固定時間T0內擺動到角度a,擺臂的擺動角速度為ω2,擺臂擺動最大角速度為ωm,擺臂的加速段結束時間為t1,減速段開始時間為t2,齒輪轉動角速度為ω1,齒輪半徑為r1,齒條運動位移為x,擺臂擺動角度為α,擺臂旋轉軸與齒條鉸接點連線同豎直線夾角為β,其余參數見圖2,可以得到下列方程

上述公式中,上側為擺臂運動規律規劃路徑,下側為擺臂與齒輪齒條運動關系,根據設定的擺臂運動規律,使用MATLAB對下側公式進行求解可以得到齒輪齒條運動曲線,之后將齒輪運動規律折換后施加于驅動電機,使用ADAMS進行多剛體系統動力學求解,可以測算電機扭矩和功率,以及齒輪齒條受力情況,為電機的選型和運動規律提供參考[7,8]。
3 擺臂機構運動分析
簡化后的擺臂機構主要組成部分有:擺臂,連桿,齒條,齒輪等,通過三維軟件建模之后導入ADAMS中,建立虛擬樣機模型,主要參數有:齒條重量約180,擺彈機帶彈重量約300,連桿重量約50。機構中有4個部件,其中有4組為旋轉低副,1組移動低副,1組高副,系統自由度為F=3×4-2×5-1=1。
該型擺臂機構指定運行時間為1秒,擺臂運行范圍100°,即T0=1s,a=100°,設計四種擺臂運動最大角速度,每種情況下設計三種運動時間,如表1所示,共12種工況分別進行計算求解,其中第四種情況為加速之后直接減速,沒有勻速段。根據表1情況結合上述公式,通過MATLAB編程可繪制出齒輪運動角速度,將其作為驅動施加于齒輪齒條,進行系統仿真。具體情況如表1所示。

表1 擺臂機構運動規律
3.1 最大角速度ωm=160°/s情況下(取中間值進行分析)
圖3.1-1∽3.1-4為加速段0.5s,勻速段0.25s,減速段0.25s的運行狀況,圖3.1-1∽3.1-2為MATLAB求解運動特性曲線;圖3.1-3∽3.1-4為根據MATLAB求解運動特性結果導入ADAMS后,使用ADAMS進行動力學仿真求出的動力學特性曲線;
圖3.1-1為擺臂設定的運動規律,根據運動規律求解出的角加速度;
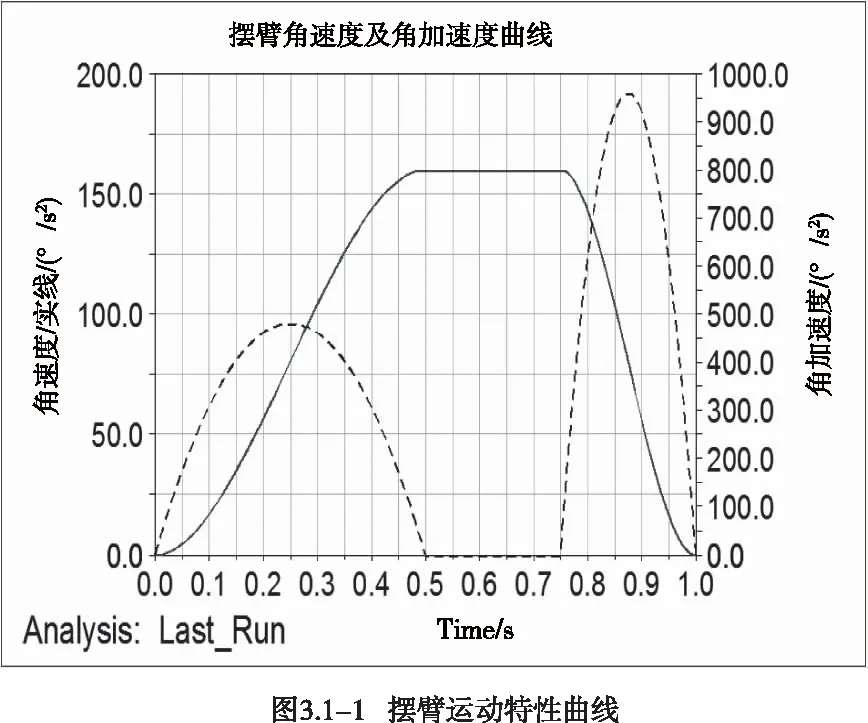
圖3.1-2為根據MATLAB求解出的齒輪端運動角速度及角加速度;
圖3.1-3為根據ADAMS進行動力學仿真求出的齒輪端所需功率及轉矩曲線;
圖3.1-4為根據ADAMS進行動力學仿真求出的齒條端受力及加速度曲線;

擺臂運動最大角速度ωm=160°/s情況下,其余兩種運動特性求解曲線不在敘述,在后文分析中會將求解數據直接數據列出,對比分析之后對電機端進行最優解求解。
3.2 最大角速度ωm=177.78°/s情況下(取中間值進行分析)
圖3.2-1∽3.2-4為加速段0.5s,勻速段0.125s,減速段0.375s的運行狀況,圖3.2-1∽3.2-2為MATLAB求解運動特性曲線;圖3.2-3∽3.2-4為根據MATLAB求解運動特性結果導入ADAMS后,使用ADAMS進行動力學仿真求出的動力學特性曲線;
圖3.2-1為擺臂設定的運動規律,根據運動規律求解出的角加速度;
圖3.2-2為根據MATLAB求解出的齒輪端運動角速度及角加速度;
圖3.2-3為根據ADAMS進行動力學仿真求出的齒輪端所需功率及轉矩曲線;

圖3.2-4為根據ADAMS進行動力學仿真求出的齒條端受力及加速度曲線;

擺臂運動最大角速度ωm=178.78°/s情況下,其余兩種運動特性求解曲線不在敘述,在后文分析中會將求解數據直接數據列出,對比分析之后對電機端進行最優解求解。
3.3 最大角速度ωm=145.46°/s情況下
圖3.3-1∽3.3-4為加速段0.5s,勻速段0.375s,減速段0.125s的運行狀況,圖3.3-1∽3.3-2為MATLAB求解運動特性曲線;圖3.3-3∽3.3-4為根據MATLAB求解運動特性結果導入ADAMS后,使用ADAMS進行動力學仿真求出的動力學特性曲線;
圖3.3-1為擺臂設定的運動規律,根據運動規律求解出的角加速度;
圖3.3-2為根據MATLAB求解出的齒輪端運動角速度及角加速度;
圖3.3-3為根據ADAMS進行動力學仿真求出的齒輪端所需功率及轉矩曲線;
圖3.3-4為根據ADAMS進行動力學仿真求出的齒條端受力及加速度曲線;


擺臂運動最大角速度ωm=145.46°/s情況下,其余兩種運動特性求解曲線不在敘述,在后文分析中會將求解數據直接數據列出,對比分析之后對電機端進行最優解求解。
3.4 最大角速度ωm=200°/s情況下
圖3.4-1∽3.4-4為加速段0.5s,勻速段0s,減速段0.5s的運行狀況,圖3.4-1∽3.4-2為MATLAB求解運動特性曲線;圖3.4-3∽3.4-4為根據MATLAB求解運動特性結果導入ADAMS后,使用ADAMS進行動力學仿真求出的動力學特性曲線;
圖3.4-1為擺臂設定的運動規律,根據運動規律求解出的角加速度;
圖3.4-2為根據MATLAB求解出的齒輪端運動角速度及角加速度;
圖3.4-3為根據ADAMS進行動力學仿真求出的齒輪端所需功率及轉矩曲線;
圖3.4-4為根據ADAMS進行動力學仿真求出的齒條端受力及加速度曲線;

擺臂運動最大角速度ωm=200°/s情況下,其余兩種運動特性求解曲線不在敘述,在后文分析中會將求解數據直接數據列出,對比分析之后對電機端進行最優解求解。
4 擺臂機構運動結果分析
通過以上仿真計算,可以將計算結果匯總為表2,結合該表格數據重點對電機端進行分析。

表2 擺臂機構仿真計算結果
首先確定減速機的速比,電機額定轉速多為2000r/min或3000r/min,可以初步確定減速機減速比范圍i=2.69~5.13,綜合扭矩以及安裝空間等因素考慮,減速機減速比不宜過小,選為i=4比較合適,電機額定速度選取3000r/min,之后根據公式折算到電機端所需功率,電機功率傳遞到齒輪端需要通過減速機和聯軸器等,考慮到傳遞效率,可以得出電機功率與齒輪功率差值,進而求出該差值在電機功率中所占的比重,計算結果匯總為表3。

表3 電機端計算結果
綜合以上數據可以看出,電機選型功率和實際所需功率差值所占比重均小于0.1,分析結果可信,考慮電機外形尺寸,電機端轉矩不宜過大,同時考慮齒條受力情況,可以選定序號2中所列情況,電機轉矩Td=87.55N·m,電機功率Pd=27.5kW,電機運行規律選取加速段t1=0.5s,電機最大轉速ωdm=2337r/min,電機額定3000r/min,這種情況下電機所需功率和轉矩最小,齒條受力最小。
5 結論
本文以某型艦炮擺臂機構為例,
通過三維軟件建立虛擬樣機模型,采用MATLAB和ADAMS進行聯合計算,針對特定的擺臂運動規律,對電機端運動特性進行了分析,并對齒輪齒條受力,減速機速比選型,電機功率及轉矩匹配性等進行了探索,為電機運行狀態控制提供了一種參考。結果表明和實際要求具有較高一致性,為下一步系統優化設計提供了一種探索。
