基于Carsim的駕駛仿真系統開發
2021-11-19 08:17:38李曙光楊亞茹
計算機仿真 2021年10期
吉 豪,李曙光,楊亞茹,王 穎
(1.四川大學機械工程學院,四川 成都 610065;2.電子科技大學自動化工程學院,四川 成都 611731)
1 引言
駕駛仿真系統是計算機仿真技術應用在汽車領域的一個典型案例,主要由操縱平臺、車輛動力學模型和運動模擬平臺組成[1-2]。可用于駕駛技能培訓、駕駛員行為特性研究、車輛在極限工況下的性能測試、硬件在環仿真測試、車身結構參數優化等[3-4]。而車輛動力學建模是開發駕駛仿真系統的核心和關鍵技術,也是其開發過程中的難點所在。
王偉等人通過車輛運動時的受力分析為駕駛模擬系統搭建了動力學仿真模型,提高了仿真模型的準確性[5]。詹軍等人開發了車輛動力學系統的轉向模型、制動系統模型,提高了ADSL駕駛模擬器的逼真度[6]。蘇光磊在Simulink中創建了車輛動力學模型,加快了駕駛模擬器仿真模型的搭建工作[7]。可以發現,建立更加準確的車輛動力學模型可以提高駕駛仿真系統的精度和有效性,但是通過分析和數學建模的方法來搭建駕駛仿真系統的車輛動力學模型較為困難和復雜。
Carsim車輛動力學軟件可通過配置參數的方式快速地搭建出仿真汽車的車輛動力學模型和行駛場景,還可以進行實時仿真。許吉禪等人利用Carsim快速的搭建出了車輛半主動懸架的仿真模型,通過仿真測試改善了車輛懸架的性能[8]。張玉潔設計了基于Carsim的電動助力轉向系統,通過Carim的實時仿真模式的數據輸入輸出接口對其進行了硬件在環仿真測試[9]。魯玉萍等人利用Carsim和Simulink搭建了車輛動力學模型,通過實驗對比仿真模型和樣車測試數據,結果表明Carsim仿真模型具有較高的準確度[10]。利用Carsim軟件可快速地搭建出較為準確的駕駛模擬系統的車輛動力學仿真模型,還可以通過其數據接口對其搭建的仿真車輛進行實時控制以及處理其動力學模型輸出的車輛行駛數據。
本文利用不同于數學建模的方法,通過配置參數在Carsim中快速搭建了駕駛仿真系統的車輛動力學模型,并利用其數據接口開發了操縱平臺和運動模擬平臺,改善在開發駕駛仿真系統的過程中車輛動力學建模復雜的問題,降低駕駛模擬系統車輛動力學建模的難度,簡化了開發過程。
2 操縱平臺
駕駛仿真系統的操縱平臺用于采集操縱人員的控制指令。其主要由傳感器和DSP開發板組成,如圖1所示。為了滿足該系統對于處理速度、計算精度等方面的要求,采用型號為TMS320F28335的DSP處理器。該芯片主頻高達150MHz,能夠進行32位浮點運算,并且具有豐富的外設接口與通信模塊。

圖1 操縱平臺硬件
信號采集框架如圖2所示。傳感器主要包括油門踏板傳感器、剎車踏板傳感器、方向盤轉角傳感器、檔位位置傳感器。油門和剎車踏板傳感器將踏板的位移轉換成相應的電壓信號輸出,利用DSP的ADC模塊采集該電壓信號;利用其CAN總線通訊接口讀取方向盤轉角傳感器輸出的轉角數值信號;利用外部中斷模塊檢測檔位位置傳感器輸出的電平信號,從而讀取狀態信息。
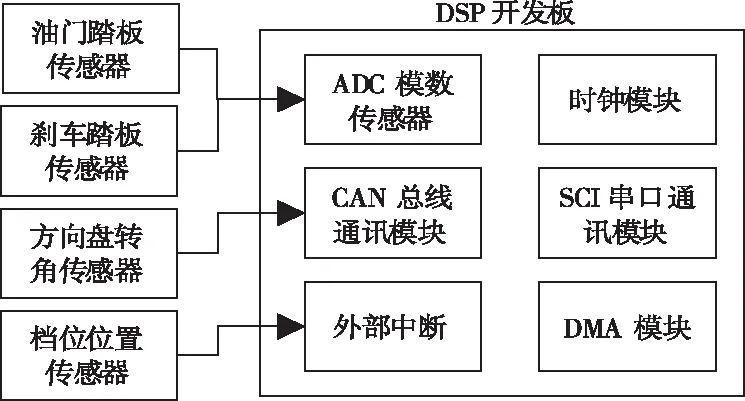
圖2 信號采集框架
通過配置采樣量化寄存器可以有效地去除毛刺信號的干擾。使用DMA模塊直接訪問ADC采樣結果寄存器并發送給SCI模塊的數據寄存器,可將采樣采集到的數據通過RS232串口通訊模塊直接發送給上位機程序,無需經過CPU處理,有效地降低了DSP處理器的負擔。
3 動力學聯合仿真環境
Carsim汽車仿真軟件的LabVIEW_RT模式可實現與LabVIEW軟件的共同運行,快速地搭建出動力學聯合仿真環境,如圖3所示。

圖3 動力學聯合仿真環境
3.1 Carsim仿真環境
Carsim軟件的Road頁面中提供了車輛行駛的三維場景,并且可以設置路面附著系數等參數;在Vehicle Configuration中設置車輛的車身結構、風阻系數、輪胎模型、懸架模型等參數,搭建車輛仿真模型;在Run Control中設置主機和目標機IP、仿真步長、仿真輸入輸出參數,實現與LabVIEW軟件的數據交互。
3.2 LabVIEW上位機程序
利用LabVIEW軟件的圖形化編程語言可快速地開發上位機程序,與Carsim軟件聯合仿真,該程序具有以下功能模塊:
1)串口數據讀取。利用VISA串口配置、串口接收、串口關閉等模塊讀取串口通訊數據;通過RS232轉USB芯片,接收DSP采集并發送過來的傳感器信號數據。
2)信號處理。使用中值濾波算法模塊對信號進行濾波處理:設定采樣窗個數,按照數值大小排序,去掉最大值和最小值后,取剩余數據的平均值輸出;在零點位置加入死區環節,進一步降低干擾造成的數據波動。
3)數據交互。通過不斷循環調用與Carsim連接的初始化(Init.vi)、單步(Step.vi)和停止(Terminate.vi)子VI程序實現數據交互,把控制信號發送給Carsim,同時接收其返回的車輛行駛數據。
4)數據顯示。利用數值顯示控件顯示控制信號以及車輛實時數據信息。
4 運動仿真平臺
利用Washout算法和六自由度平臺開發駕駛仿真系統的運動仿真平臺,該平臺用于模擬Carsim中的仿真車輛在行駛過程中的加速度和車身姿態,為駕駛人員提供更加逼真的駕駛感受。
4.1 系統組成
Carsim可實時計算出車輛加速度和角速度,并發送給LabVIEW進行處理。由于六自由度平臺的運動范圍有限,不能完全復現出車輛行駛過程的車身姿態,所以利用LabVIEW控制設計工具包編寫Washout算法程序對Carsim輸出的直線加速度α和旋轉角速度ω進行處理,將其轉換成六自由度平臺的位移距離S和旋轉角度θ,并通過TCP/IP模塊發送給六自由度平臺控制器,實現實時的運動模擬。
4.2 Washout算法設計
Washout算法結構如圖4所示。主要由高通直線加速度通道、低通直線加速度通道和高通角速度通道組成。
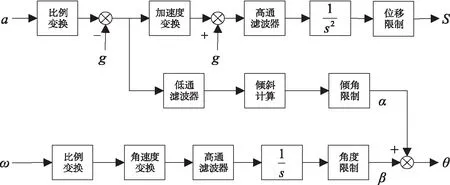
圖4 Washout算法框圖
4.2.1 高通直線加速度通道
利用高通濾波器過濾出Carsim動力學模型輸出的車輛運動過程中的高頻直線加速度,再通過二次積分轉換成平臺的位移S。
比例變換:由于六自由度平臺的運動范圍有限,需要利用比例環節對輸入的加速度幅值進行限制,避免其超過最大幅度。采用三階多項式設計該環節
(1)
y=a0+a1x1+a2x2+a3x3
(2)
式中,ax、ay、az分別為X、Y、Z三軸方向的直線加速度。
由于人體感知加速度的耳石器官是通過比力來感受運動加速度,因此需要對加速度進行比力變換
fg=a-g
(3)
式中,fg為比力;g為重力加速度。
加速度變換:利用變換矩陣L將車輛的直線加速度從體坐標系變換到慣性坐標系
f1=Lfg
(4)
L=LxLyLz
(5)
(6)
(7)
(8)
式中,σ、?、λ分別為繞X、Y、Z軸的旋轉角度;Lx、Ly、Lz為分別為對應的旋轉系數矩陣。
二階和三階高通濾波器傳遞函數一般形式為
(9)
(10)
式中,H(s)、G(s)分別為二階、三階高通濾濾波器對應的傳遞函數;k為放大系數;ωn為自然響應頻率;ωb為一階環節轉角頻率;ξ為阻尼比。
當輸入幅值為1的階躍信號時,利用終值定理
(11)

(12)
通過上式可以發現:使用二階高通濾波器后經過二次積分得到的位移值非零,平臺會停在某個位置;而使用三階高通濾波器得到的輸出值會逐漸變為0,平臺會回逐步到初始位置,可以為下一次運動提供更大的運動范圍,輸出結果對比如圖5所示。
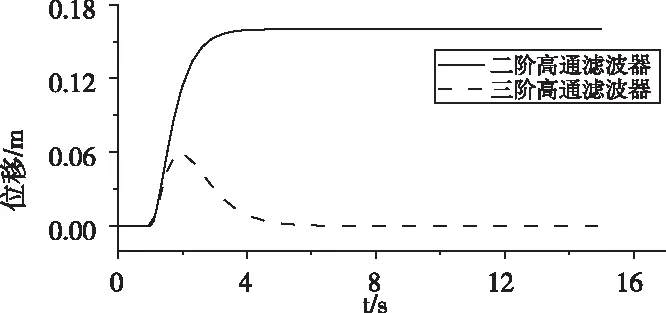
圖5 濾波器性能對比
4.2.2 直線加速度通道
利用低通濾波器過濾Carsim輸出的低頻直線加速度信號,再通過計算轉換成角度。使平臺傾斜一定角度,利用重力加速的分量模擬低頻和持續性的加速度運動。
低通濾波器的傳遞函數一般形式
(13)
平臺傾斜角度α計算
(14)
4.2.3 高通角速度通道
利用高通加速度通道過濾出Carsim輸出的高頻直線加速度,通過一次積分轉換成平臺的旋轉角度β。
通過角速度變換矩陣T將角速度轉變成慣性坐標系下的歐拉角變換率
ω1=Tω
(15)
(16)
式中,ω為歐拉角變換率。
其它各個環節與高通直線加速度通道類似,不再敘述。
5 實驗
為了驗證所設計的駕駛仿真系統的有效性,設計了駕駛仿真和運動仿真。駕駛仿真通過對比駕駛輸入控制量和駕駛仿真系統輸出參數來驗證該仿真系統的跟隨性。通過運動仿真驗證六自由度運動平臺模擬車輛運動的性能,以及Washout算法在該仿真系統的有效性。駕駛模擬器仿真系統如圖6所示。

圖6 駕駛仿真系統
5.1 駕駛仿真
記錄采集到的方向盤、油門、檔位、剎車傳感器信號并將其轉換成方向盤轉角、發動機節氣門開度(百分比)、檔位、制動壓力,發送給Carsim進行實時駕駛仿真,然后將與Carsim輸出的數據對比,實驗結果如圖7、8、9、10所示。

圖7 轉向實驗
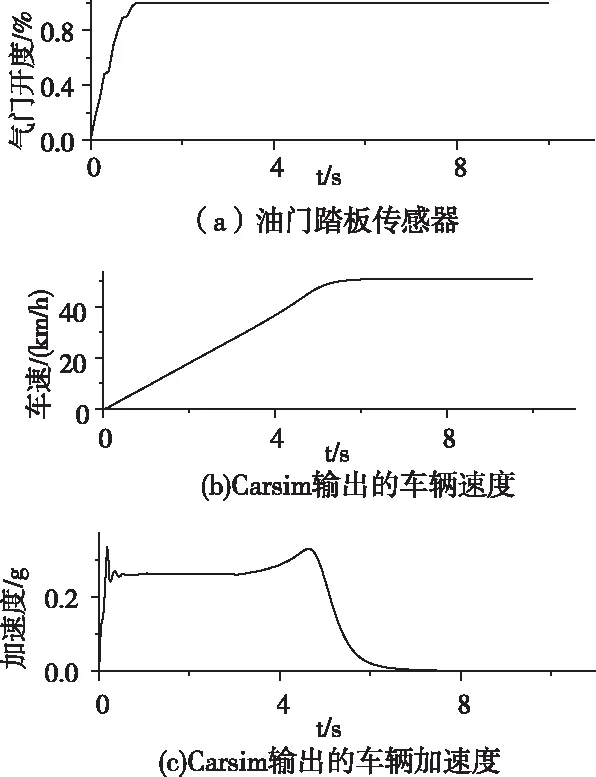
圖8 加速實驗

圖9 換擋實驗
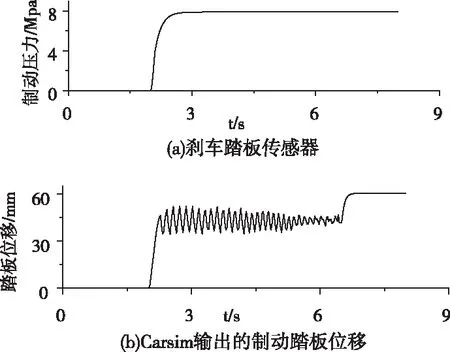
圖10 ABS制動實驗
駕駛仿真包括轉向仿真、加速仿真、換擋仿真和制動仿真。由圖7、8、9、10可知:Carsim輸出的前輪轉角和車輛側向加速度響應能夠很好地跟隨采集到的方向盤傳感器角度信號;鎖定變速箱檔位,輸入給定的油門信號,輸出的車輛速度會逐漸達到峰值,加速度會逐漸變為0;當變換檔位時,離合器的閉合狀態以及車輛在X方向的加速度會發生相應的變化;將采集到的剎車踏板傳感器信號轉換成制動壓力輸入Carsim,處于ABS模式的制動系統會使剎車踏板的位移出現抖動,最后達到穩定。通過測試,發現輸出相應的延遲低于10ms,能夠滿足實時性的要求。
5.2 運動仿真
利用給定測試信號作為輸入,測試運動仿真系統中設計的Washout算法,輸出結果如圖11所示。
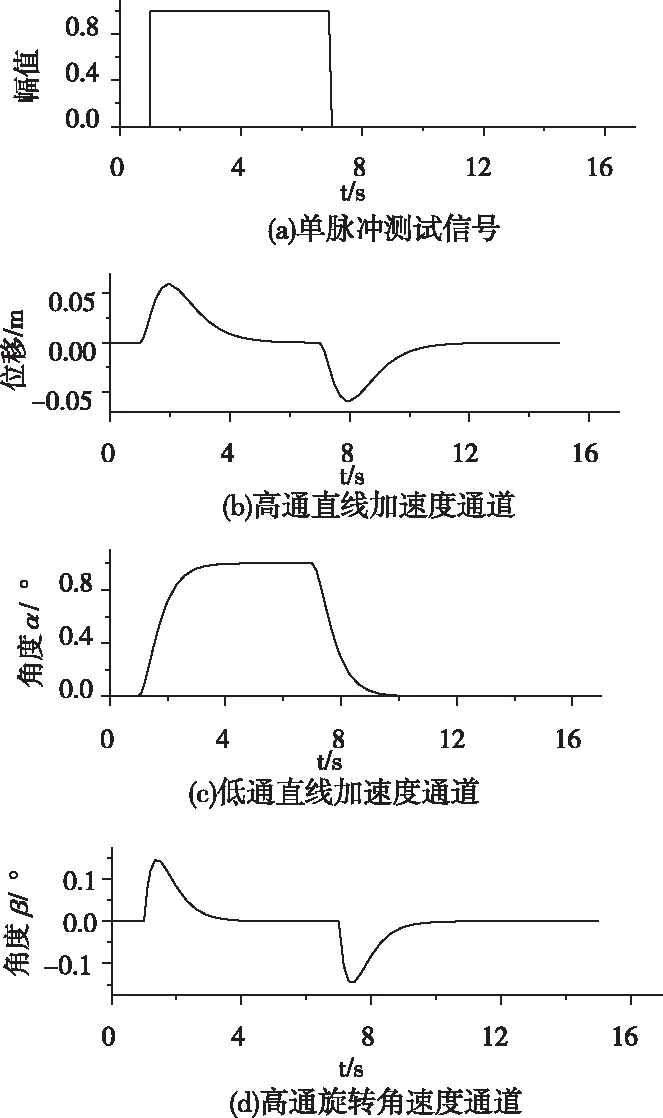
圖11 算法仿真
由圖11可知:高通直線加速度通道可過濾出車輛行駛過程中的高頻直線加速度并將其轉換成位移,使平臺運動相應的距離,當加速度穩定后,輸出的位移變為0,平臺逐漸返回原點;低通加速度通道過可過濾出低頻直線加速度,并轉換成一定的傾斜角度,用于模擬低頻和持續性的加速度;高通角速度通道可過濾出高頻角速度,將其轉換成對應角度,使平臺傾斜,模擬車身姿態。
6 結論
本文提出基于Carsim的駕駛仿真系統開發方案,通過配置參數在Carsim中快速搭建了車輛動力學模型,將操縱平臺采集到的駕駛員控制指令接入到Carsim的數據輸入接口,利用Washout算法處理Carsim動力學仿真模型輸出的車輛加速度、角速度。通過實驗發現在Carsim中搭建的車輛動力學模型的輸出響應對控制信號的跟隨性較好,根據其輸出的車輛行駛參數搭建的Washout算法有效地模擬了車輛運動,該方案降低駕駛仿真系統開發過程中動力學建模的難度,加快了開發過程,具有可行性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數學(2022年2期)2022-06-05 07:10:50
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
電子制作(2018年11期)2018-08-04 03:25:42
