圖像獲取過程中自動對焦方法研究
2021-11-19 17:06:07王河艾博
裝備維修技術 2022年2期
王河 艾博
摘 要:現有半導體設備使用的變倍顯微鏡對焦多為人工手動調節,在顯微鏡使用過程中需要不停地人為調節倍率和焦距,為減少人為因素對顯微鏡對準時的干擾,提高設備的自動化程度,研究了一種適用于半導體設備的變倍顯微鏡的自動對焦方法。通過對圖像灰度處理后的對比度分析,將信息反饋給變倍電機和調焦電機,完成顯微鏡的變倍和調焦動作。
關鍵詞:變倍顯微鏡;圖像識別;自動對焦
在半導體設備中,顯微鏡作為設備的眼睛已廣泛應用,完成圖像采集、自動對準、坐標提取等功能,常用的顯微鏡種類主要包括單倍率顯微鏡、手動變倍顯微鏡等。在半導體芯片制造生產中,使用的多為手動變倍顯微鏡,在該過程中需要不停地人為干預對顯微鏡進行調節,進而完成同步觀察不同標記大小的芯片,操作繁瑣、效率低下,且觀察效果不佳。隨著自動半導體設備的發展,對顯微鏡也提出了同步觀察不同大小標記點情況下的自動變倍自動對焦的要求,以提高顯微鏡的觀察效率。
1 變倍顯微鏡變倍原理
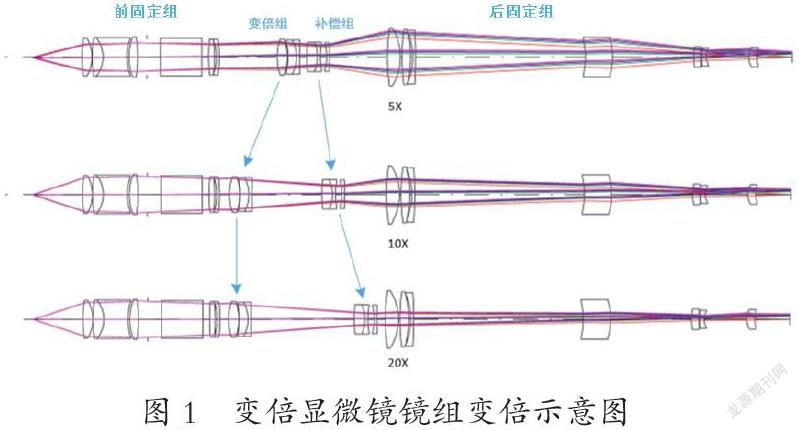
變倍顯微鏡也稱為變焦距系統,最常用結構為機械補償結構,一般分為前固定組、變倍組、補償組、后固定組。如圖1所示,以由5X放大到20X為例,前、后固定組為固定倍率分別為5X和1X;變倍組(變倍比為1:4)進行前后移動,改變焦距大小,完成變倍;補償組的前后移動對改變焦距后的像面位置進行修正。
2 變倍顯微鏡自動對焦系統設計
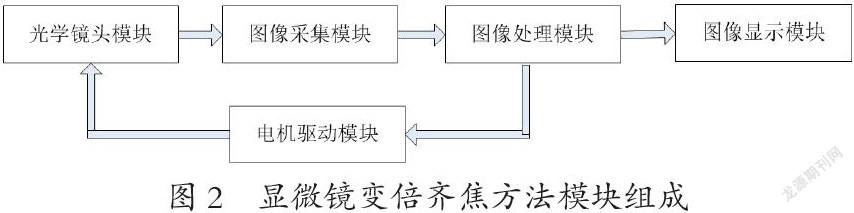
在自動設備運行過程中,需要采集到清晰的像,才能進行后續的其他動作指令,此時需要軟件進行圖像處理,反饋至電機驅動,調節顯微鏡的焦距和倍率。系統模塊包括:光學鏡頭模塊、圖像采集模塊、圖像處理模塊、圖像顯示模塊和電機驅動模塊。圖像采集模塊經光學鏡頭完成圖像采集任務,傳輸至圖像處理模塊;圖像處理模塊通過特征圖形匹配和對比度進行分析處理,反饋到電機驅動模塊;電機驅動模塊中電機通過脈沖比進行細微轉動,這時圖像采集模塊再進行采集,迭代至特征圖形和對比度達到預定標準,傳輸至圖像顯示模塊,完成動作指令。如圖2所示:
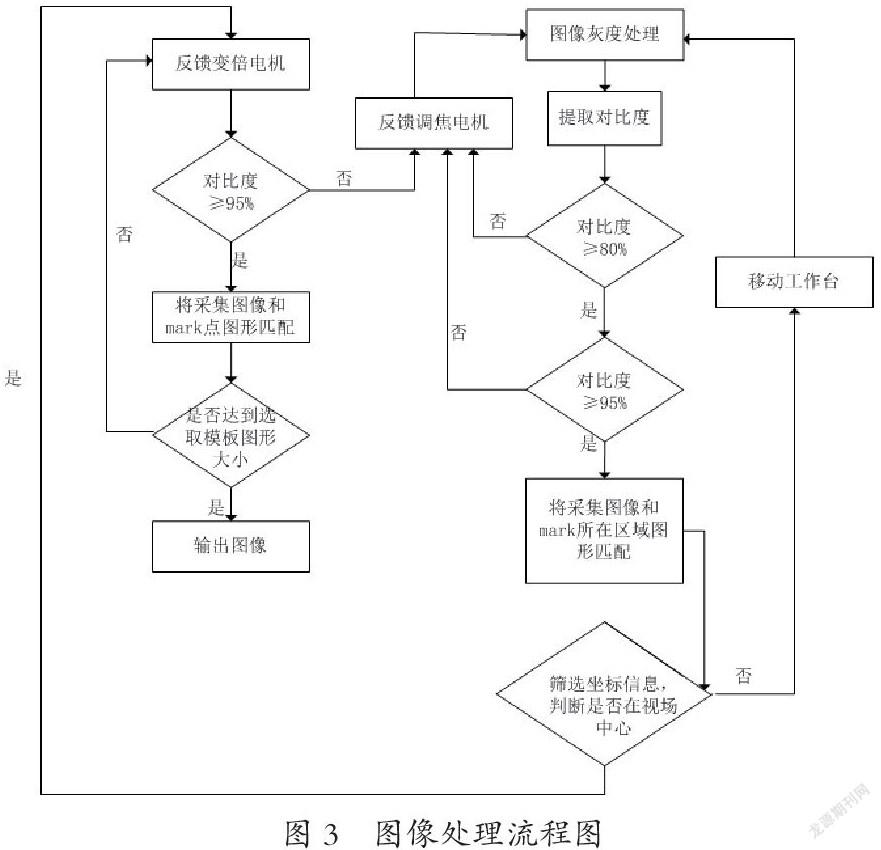
軟件處理過程中,需要為系統對比度的判定設定閾值,在閾值范圍內系統判定為齊焦狀態,設定齊焦狀態閾值為80%,輸出圖像狀態閾值為95%。因此軟件進行圖像處理流程圖如下:圖像采集后進行灰度處理,提取對比度信息,判斷對比度是否≥80%,<80%時反饋到調焦電機,進行快速調焦;再獲取圖像信息,直至對比度≥80%,再進行對比度判斷是否≥95%,是則進行標記點匹配,否則反饋調焦電機,慢速調節。當完成對比度判斷,此時顯微鏡已經從初始化狀態尋找到清晰的像。將像與標記點進行對比,如果在視場中心則反饋變倍電機進行倍率放大或縮小,否則移動工作臺尋找標記,反復此動作直至標記信息處于視場中心。調節變倍電機后,再次進行對比度判斷是否≥95%,是則進行標記點圖像匹配,否則反饋調焦電機,重復調焦動作。圖像和標記圖形進行匹配,未達到選取模版圖形大小時,反饋變倍電機,進行再變倍,達到選取模板圖形大小時,輸出圖像。如圖3所示:
圖像采集后經過對比度分析和標記點區域匹配,得到清晰適中的像,顯微鏡變倍齊焦對準完成,將所得像素坐標反饋給上位機繼而完成后續設備所需動作。
2.1變倍環節的圖像匹配
經過顯微鏡放大通過CCD相機進行圖像采集,放大后的標記點形狀、大小、旋轉角度都會存在誤差,為保證在標記對準時圖像能處于一個適中大小的圖像,需要對圖像進行處理,判斷此時倍率是否能夠完成對準動作。為準確實現圖像匹配,需要選取一個完整清晰的標記點圖形,通過圖像頻譜的相位相關性實現存在平移、旋轉和縮放的兩幅圖像間的配準。對于存在平移、旋轉和縮放的圖像f1(x,y)和,f2(x,y),兩者在空間域中的位置關系如下式1所示
其中f1(x,y)為采集圖像,f2(x,y)為選取圖像,圖像水平和垂直方向的縮放使用相同的縮放系數a,θ為圖像的旋轉系數,Δx,Δy分別為水平方向和垂直方向的平移量。
當采集后的圖像f1(x,y)與選取圖像f2(x,y)在空間域進行對比時,判斷系數a,θ,Δx,Δy的值,對工作臺和顯微鏡進行移動,完成對準,其中變倍電機的轉動影響系數a,工作臺的移動影響系數θ,Δx,Δy。
在通過變倍電機進行轉動時,系統需要判斷系數a值的大小,當 a<1時,標記點圖形小于選取圖形大小,此時標記點過小,不利于對準;當a=1時,標記點圖形等于選取圖形大小,此時標記點為選取圖形大小,適合對準;當a>1時,標記點圖形大于選取圖形,此時標記點圖形過大,不利于對準。
變倍顯微鏡在執行變倍工作時,需要滿足被放大物體處于視場中心,否則會出現放大后物體偏離視場,在高倍率物鏡下,視場偏離會導致很難再次尋找到標記點,因此需要實時通過系數θ,Δx,Δy,矯正視場中心位置。通過每個像素點所在位置進行校準,在CCD相機像元中
式(2)中L表示在像元中每個像素點在實際中表示的距離,C表示像元尺寸大小,г表示光學放大倍率,當被測物體偏離視場中心時,根據像素坐標與實際坐標的轉換比例計算出系數θ,Δx,Δy,調節工作臺,完成校準。
圖4為不同倍率下的基片標記,選取模板標記圖形為20倍下的“閃電標記”,圖(a)在5倍標記時,圖中“閃電標記”的系數a<1,未能達到對準要求,且視場未處于圖像中心,移動工作臺X,Y軸,調整視場位置,如圖(b)所示,此時系數a<1,視場位置變化,仍不滿足對準要求,需要更進一步調整,如圖(c)所示,此時系數a=1,采集到的圖像中標記和選取的標記大小相同,此時完成變倍
2.2基于對比度的焦距判別
在前文中提到顯微鏡變倍調節是在圖像保持清晰的條件下進行,在顯微鏡成像過程中,像的輪廓邊緣越清晰,那么它的亮度梯度就越大,即像內圖像邊緣與背景對比度就越大;相反離焦的像,輪廓邊緣模糊不清,亮度梯度或對比度下降。離焦越遠,對比度越低。根據此原則,利用圖像的對比度進行處理,在對比度大于等于所設閾值時,判斷此時為齊焦狀態,小于所設閾值時,此時為離焦狀態,需要調焦電機進行調焦。調焦電機即為顯微鏡Z向高度電機,作用為調節顯微鏡的上下高度,同時電機精度小于顯微鏡景深距離。電機精度越高,圖像對比度獲取的越準確,系統判定也越精準。
在對相機采集的圖像對比度進行分析,設定齊焦狀態閾值為80%,系統輸出圖像閾值為95%,如圖5所示,在80%-100%之間,此時系統判定此時為齊焦狀態,h為焦點,a-b的距離為顯微鏡焦深。
實際使用的顯微鏡的景深為4μm,工作距離為30mm,進行對焦時,Z向高度距離工作臺面的初始值為30mm,為保證初始狀態高度低于焦點高度,設定一個遠大于景深的距離0.05mm,Z向移動高度=待測芯片的厚度X-0.05mm,此時對比度小于80%,調焦電機進行快速轉動,系統實時檢測對比度值,當對比度≥80%時此時系統判定為齊焦狀態;然后電機改為慢速轉動,當對比度值≥95%時,系統輸出此時圖像。
3 自動變倍調焦顯微鏡系統實例
顯微鏡20倍物鏡(視場大小3mm)在2英寸芯片(厚2mm)距30mm處且在在景深范圍內獲取的圖像,對比度分別為35%、80%、90%、95%、85%、70%,圖像的清晰度也隨圖像的對比度變化而變化,變化范圍為35%-95%。如圖6所示:
此時圖像對比度和顯微鏡Z向移動高度數據如表1,對比度范圍為35%-95%,顯微鏡Z向高度為65μm-72μm。
顯微鏡在距離工作臺面31.95mm處開始移動,在向上移動65μm時,對比度為35%,此時還未進入齊焦狀態,顯微鏡繼續向上移動,當到達69μm時,對比度達到最高95%,此時判斷為齊焦狀態,通過人眼觀察,線條清晰。圖7中所示,在Z向高度移動67-71μm時,對比度值均在80%以上,超過顯微鏡景深范圍后,對比度快速下降,此時已經為離焦狀態。
4 總結
本文介紹了變倍顯微鏡自動變倍齊焦方法,通過圖像處理方法,將采集的圖像進行對比度分析,完成顯微鏡的變倍和調焦動作。此方法可完成自動化半導體設備中顯微鏡對準動作,滿足了顯微鏡在同時觀察不同大小標記點的情況下自動變倍自動對焦的要求,提高了顯微鏡的觀察效率。同時為減少實際工作中圖像未能識別的問題出現,需在對準前對標記點進行標定,對不同樣片進行對準實驗,以提高圖像獲取過程中的準確性。
參考文獻:
[1] 陳金國.數字圖像自動聚焦技術研究及系統實現[D].西安:西安電子科技大學,2007:27-29.
[2]李林,黃一帆,王涌天.現代光學設計方法第3版[M].北京:北京理工大學出版社,2018:230-233.
[3]許盛,李見為.高級顯微鏡系統智能化自動調焦的研究及實現.光學儀器,2000,22(5):22-26
作者簡介:
王河(1995—),男,漢,主要從事半導體光刻與測試設備研發工作。
