智能化無人開采工作面適用性多層次模糊綜合評(píng)價(jià)研究
2021-11-20 08:48:38張科學(xué)王曉玲何滿潮尹尚先李首濱孫健東程志恒趙啟峰殷帥峰朱俊傲楊海江
采礦與巖層控制工程學(xué)報(bào) 2021年1期
張科學(xué),王曉玲,何滿潮,尹尚先,李首濱,孫健東,李 東,程志恒,趙啟峰,殷帥峰,亢 磊,朱俊傲,楊海江
( 1.華北科技學(xué)院 智能化無人開采研究所,北京 101601;2.中國礦業(yè)大學(xué)( 北京 ) 深部巖土力學(xué)與地下工程國家重點(diǎn)實(shí)驗(yàn)室,北京 100083;3.煤炭科學(xué)研究總院,北京 100013;4.華北科技學(xué)院 安全工程學(xué)院,北京 101601;5.中國礦業(yè)大學(xué)( 北京 ) 煤炭資源與安全開采國家重點(diǎn)實(shí)驗(yàn)室,北京100083;6.煤礦安全高效開采省部共建教育部重點(diǎn)實(shí)驗(yàn)室( 安徽理工大學(xué) ),安徽 淮南 232001 )
當(dāng)今煤炭行業(yè)迅速邁入智能化發(fā)展階段,為保障煤炭智能化開采的安全性和高效性,對(duì)煤炭智能化無人開采的影響因素提出了嚴(yán)格要求。
王國法[1]等總結(jié)了不同煤層所適用的智能化綜采技術(shù),提出了綜采裝備適應(yīng)的5項(xiàng)關(guān)鍵技術(shù),對(duì)于未來智能化無人開采更要突破的關(guān)鍵技術(shù)裝備進(jìn)行了展望;任懷偉[2]等通過分析數(shù)據(jù)、構(gòu)建智慧礦山信息模型,實(shí)現(xiàn)了在不同的地質(zhì)條件下能夠穩(wěn)定開采;范京道[3]等根據(jù)黃陵一號(hào)煤礦智能開采的實(shí)踐和經(jīng)驗(yàn),改善了工作面智能化控制系統(tǒng),實(shí)現(xiàn)了一系列的自動(dòng)化生產(chǎn);李首濱[4]提出了未來會(huì)朝智能自適應(yīng)開采模式逐步發(fā)展演變,智能化無人開采工作面最終會(huì)以成熟的技術(shù)和完善的裝備實(shí)現(xiàn);王國法[5]等提出了智能化綜采的概念以及內(nèi)涵,研究了不同技術(shù)在地質(zhì)條件不同情況下的應(yīng)用,展望了智能化無人開采方向未來的研究重點(diǎn);黃曾華[6]從幾個(gè)方面對(duì)可視遠(yuǎn)程干預(yù)無人化開采技術(shù)進(jìn)行深入分析,根據(jù)“無人操作、有人巡視”的開采理念,并結(jié)合各種先進(jìn)的控制技術(shù),研發(fā)了一套高效的智能決策聯(lián)動(dòng)控制系統(tǒng),為實(shí)現(xiàn)智能化無人開采提供了探索研究的基礎(chǔ);王國法[7]等明確了智能化無人開采技術(shù)的發(fā)展方向,提出了智能化無人開采建設(shè)的總目標(biāo)和階段性實(shí)現(xiàn)目標(biāo)及發(fā)展路徑;張科學(xué)[8-9]等基于3種計(jì)算方法確定了可視遠(yuǎn)程干預(yù)型智能化無人開采和自適應(yīng)型智能化無人開采2個(gè)技術(shù)階段,提出了綜采工作面智能化開采的5個(gè)關(guān)鍵技術(shù)和關(guān)鍵參數(shù),發(fā)現(xiàn)了工作面調(diào)斜控制的內(nèi)在根本原因及外在誘發(fā)原因,在計(jì)算的誤差范圍內(nèi)解決了關(guān)于滿足綜采智能化工作面調(diào)斜控制技術(shù)的現(xiàn)場(chǎng)需要;王國法[10]等通過對(duì)我國煤礦綜合機(jī)械化、自動(dòng)化和智能化發(fā)展現(xiàn)狀的總結(jié)和煤礦智能化發(fā)展的基礎(chǔ)理論,深入剖析了其中的研究難點(diǎn)和關(guān)鍵技術(shù),提出4種新型開采模式,指明了不同開采模式的核心技術(shù)以及開采效果,基于智能化無人開采發(fā)展的基本原則和發(fā)展模式,提出自己的思考與相關(guān)政策建議;澳大利亞目前正在研究遠(yuǎn)程控制的全自動(dòng)無人長壁工作面開采技術(shù)[11]。以上這些研究只對(duì)智能化開采中的某項(xiàng)問題提出了具體的分析和展望,而智能化無人開采需要綜合各項(xiàng)影響因素,提高經(jīng)濟(jì)效益和社會(huì)效益。
在煤炭開采過程中,地質(zhì)條件是影響煤炭開采的最主要因素。其次,巷道的布置體系,以及所用的采煤工藝、裝備、技術(shù)等,同樣會(huì)對(duì)開采的難度、速度、效率有所影響。不僅如此,在安全生產(chǎn)過程中,信息和安全的保障體系,以及人員的組織管理也是重要的影響因素。綜上,筆者基于層次分析法的模糊綜合評(píng)價(jià)方法[12-13],根據(jù)智能化開采過程存在的開采問題,確定了地質(zhì)條件、巷道布置體系、開采參數(shù)、采煤工藝、裝備配套、關(guān)鍵技術(shù)、保障體系和組織管理等8個(gè)影響因素,將影響智能化無人開采工作面適用性的各個(gè)影響因素作為多層次的模糊集合,根據(jù)模糊集合隸屬度計(jì)算結(jié)果定量評(píng)價(jià)智能化無人開采工作面的適用性。
1 模糊綜合評(píng)價(jià)模型的建立
為了盡可能與實(shí)際情況保持一致,在構(gòu)建模糊綜合評(píng)價(jià)模型時(shí),多采用層次分析法[14]。將現(xiàn)有的評(píng)價(jià)標(biāo)準(zhǔn)和實(shí)際測(cè)量值,經(jīng)過模糊變換處理后,對(duì)事件進(jìn)行綜合評(píng)價(jià),即模糊綜合評(píng)價(jià)。綜合評(píng)價(jià)問題需要滿足3個(gè)條件:
③ 進(jìn)行單因素評(píng)價(jià)時(shí),是從U到V的一個(gè)模糊映射f :U? V,即選定一個(gè)單因素∈U,使存在一個(gè)模糊評(píng)價(jià)集 B(U )?f (V )一一映射獲得一個(gè)模糊關(guān)系矩陣R,以

表示,于是稱( U,V,R )為綜合評(píng)價(jià)數(shù)學(xué)模型[15]。
在所有的評(píng)價(jià)因素集中,由于不同的評(píng)價(jià)因素對(duì)評(píng)價(jià)結(jié)果的影響程度也不相同,為了準(zhǔn)確表示影響程度的大小,定義了1個(gè)因素權(quán)重集A,將A作為U的因素重要程度模糊子集,表達(dá)式為

其中,Ai為Ui對(duì)A的隸屬度[15]。
若已知模糊關(guān)系矩陣U和各因素重要程度模糊子集A,則對(duì)該評(píng)價(jià)對(duì)象的模糊綜合評(píng)價(jià)結(jié)果[12-15]為


對(duì)于任意項(xiàng)bj為智能化無人開采工作面適用性的綜合評(píng)價(jià)j級(jí)的隸屬度[14],由最大隸屬原則[17]可知,若,定義bk為最大隸屬度指數(shù)x,則智能化無人開采工作面適用性可評(píng)價(jià)為k級(jí)別[15]。
2 智能化無人開采工作面適用性多層次模糊綜合評(píng)價(jià)
由模糊綜合評(píng)價(jià)模型的基本原理可知,需要確定評(píng)價(jià)因素集、評(píng)價(jià)集和模糊關(guān)系矩陣對(duì)智能化無人開采工作面適用性是否良好進(jìn)行評(píng)價(jià)。
2.1 確定評(píng)價(jià)因素集
影響智能化無人開采工作面適用性的因素有多方面,為了充分考慮影響因素指標(biāo)本身的科學(xué)性、準(zhǔn)確性、針對(duì)性、有效性和可取性,同時(shí)能夠反映最關(guān)鍵的影響因素,選取以下8個(gè)影響因素作為智能化無人開采工作面適用性的一級(jí)指標(biāo),即:地質(zhì)條件( A1)、巷道布置體系( A2)、開采參數(shù)( A3)、采煤工藝( A4)、裝備配套( A5)、關(guān)鍵技術(shù)( A6)、保障體系( A7)和組織管理( A8)。
( 1 ) 地質(zhì)條件
煤炭開采過程中不僅礦體賦存條件多種多樣,而且地質(zhì)條件復(fù)雜多變,因此在地質(zhì)條件允許的情況下,探索智能化無人開采工作面的適用性,應(yīng)著重考慮地質(zhì)條件的煤層埋深、煤層厚度、煤層傾角、煤層頂?shù)装宸€(wěn)定性、構(gòu)造復(fù)雜度。
( 2 ) 巷道布置體系
科學(xué)合理的工作面巷道布置對(duì)礦井安全生產(chǎn)和經(jīng)濟(jì)效益起到關(guān)鍵性作用。通過結(jié)合自動(dòng)成巷無煤柱開采新技術(shù)[16-20],智能化無人開采工作面巷道布置體系的方式分為121,110和N00工法巷道布置體系。
( 3 ) 開采參數(shù)
智能化無人開采工作面的幾何參數(shù)主要有:工作面采高、工作面傾向長度、工作面走向長度和工作面區(qū)段煤柱。工作面采高主要由煤層厚度決定;工作面傾向長度主要由地質(zhì)、生產(chǎn)技術(shù)和經(jīng)濟(jì)及管理因素決定;工作面走向長度主要由采( 盤 )區(qū)大小決定;工作面區(qū)段煤柱不僅是衡量一個(gè)采區(qū)開采率的重要標(biāo)準(zhǔn),而且也是煤炭安全生產(chǎn)的重要指標(biāo)。
( 4 ) 采煤工藝
智能化無人開采工作面存在著智能放煤難控制、液壓支架自動(dòng)難找直、刮板輸送機(jī)自動(dòng)難調(diào)斜等工藝類難題[9,21-22]。因此,合適的采煤工藝對(duì)智能化無人開采具有至關(guān)重要的作用。目前,智能化無人開采工作面的采煤工藝主要有綜采工藝和綜放工藝2種方式。
( 5 ) 裝備配套
選擇正確的智能化無人開采工作面裝備,既可以確保工作面的生產(chǎn)能力,也可以提升工作面設(shè)備技術(shù)水平。主要的配套技術(shù)有采煤機(jī)配套技術(shù)、液壓支架配套技術(shù)、刮板輸送機(jī)配套技術(shù)和其他裝備配套。選擇合理的配套技術(shù)有助于煤礦安全高效生產(chǎn)。
( 6 ) 關(guān)鍵技術(shù)
智能化無人開采工作面有較多技術(shù)難題亟待解決,比如智能化工作面調(diào)斜( 調(diào)工作面?zhèn)蝺A斜 )問題、調(diào)直( 調(diào)工作面直線度 )問題、調(diào)平( 調(diào)液壓支架平衡千斤頂 )問題、連續(xù)推進(jìn)問題等,其嚴(yán)重影響了智能化無人開采工作面的技術(shù)進(jìn)步及大面積推廣[21-24]。智能化無人開采的關(guān)鍵性技術(shù)包括:工作面調(diào)斜控制技術(shù)、工作面調(diào)直控制技術(shù)、工作面俯仰采控制技術(shù)和工作面連續(xù)推進(jìn)控制技術(shù)。
( 7 ) 保障體系
信息保障體系是智能化無人技術(shù)成功實(shí)踐的關(guān)鍵。安全保障體系全程跟蹤智能化無人工作面的工作過程及進(jìn)行數(shù)據(jù)監(jiān)測(cè)。故選取信息保障體系和安全保障體系作為評(píng)價(jià)指標(biāo)。
( 8 ) 組織管理
組織管理主要體現(xiàn)在以下幾個(gè)主要方面:精細(xì)化管理、標(biāo)準(zhǔn)化管理、安全監(jiān)察管理、員工素質(zhì)管理和其他管理。標(biāo)準(zhǔn)化管理是無人綜采技術(shù)管理保障的重要組成部分;安全監(jiān)察管理在無人綜采過程中,負(fù)責(zé)對(duì)安全措施的落實(shí)以及操作規(guī)程的貫徹執(zhí)行;員工素質(zhì)管理是實(shí)現(xiàn)智能化無人開采成敗的關(guān)鍵性因素;其他管理則與上述另外幾種組織管理相輔相成。
通過8個(gè)一級(jí)指標(biāo)類比可以得到智能化無人開采工作面適用性的二級(jí)指標(biāo)集合,具體公式為

式中,A11為煤層埋深;A12為煤層厚度;A13為煤層傾角;A14為煤層頂?shù)装宸€(wěn)定性;A15為構(gòu)造復(fù)雜度;A21為121工法巷道布置體系;A22為110工法巷道布置體系;A23為N00工法巷道布置體系;A31為工作面采高;A32為工作面傾向長度( 工作面長度 );A33為工作面走向長度;A34為工作面區(qū)段煤柱;A41為綜采工藝;A42為綜放工藝;A51為采煤機(jī)配套技術(shù);A52為液壓支架配套技術(shù);A53為刮板輸送機(jī)配套技術(shù);A54為其他配套技術(shù);A61為工作面調(diào)斜控制技術(shù);A62為工作面調(diào)直控制技術(shù);A63為工作面俯仰采控制技術(shù);A64為工作面連續(xù)推進(jìn)控制技術(shù);A71為信息保障體系;A72為安全保障體系;A81為精細(xì)化管理;A82為標(biāo)準(zhǔn)化管理;A83為安全監(jiān)察管理;A84為員工素質(zhì)管理;A85為其他管理。
2.2 確定評(píng)價(jià)集
為適合現(xiàn)場(chǎng)情況,充分評(píng)價(jià)智能化無人開采工作面的適用性,建立一個(gè)具有一定范圍的評(píng)價(jià)集,即:,其中,V1表示智能化無人開采工作面適用性好;V2表示智能化無人開采工作面適用性較好;V3表示智能化無人開采工作面適用性一般;V4表示智能化無人開采工作面適用性差。
2.3 模糊評(píng)價(jià)中的多層次分析
本文所涉及的一級(jí)評(píng)價(jià)影響因素有8個(gè),二級(jí)影響因素有29個(gè),僅基于單層次的綜合模糊評(píng)價(jià)模型,很難確定每個(gè)因素在評(píng)價(jià)中所占比例,從而難以精準(zhǔn)分配權(quán)重,物理意義也難以辨析,因此,應(yīng)用多層次的模糊綜合評(píng)價(jià)模型。將多層次模糊綜合評(píng)價(jià)應(yīng)用到本文,其模型如圖1所示。
2.4 確定各級(jí)評(píng)價(jià)因素的權(quán)重
使用模糊綜合評(píng)價(jià)確定各級(jí)評(píng)價(jià)因素的權(quán)重是實(shí)現(xiàn)定性評(píng)價(jià)到定量評(píng)價(jià)過渡的重要環(huán)節(jié),權(quán)重是否科學(xué)合理直接影響最后評(píng)價(jià)結(jié)果的準(zhǔn)確性。現(xiàn)有的確定權(quán)重的方法有多元統(tǒng)計(jì)分析法、神經(jīng)網(wǎng)絡(luò)分析法、灰色關(guān)聯(lián)分析法、功效系數(shù)法、層次分析法、指數(shù)加權(quán)法等。筆者團(tuán)隊(duì)根據(jù)需要應(yīng)用層次分析法( 簡稱AHP法 )來確定各因素之間的權(quán)重值[14]。基本方法:通過層次分析法建立判斷矩陣,根據(jù)判斷矩陣來計(jì)算各個(gè)因素的權(quán)重值,判斷矩陣見表1。

表1 判斷矩陣Table 1 Judgment matrix
判斷矩陣B中的元素bij表示以某一A為判斷準(zhǔn)則,要素Bi對(duì)Bj的相對(duì)重要度,即

其中,wi表示要素Bi的重要性量度值;wj表示要素Bj的重要性量度值。上述數(shù)值判斷矩陣主要是通過1~9標(biāo)度方法來量化要素重要性[14-15]。判斷矩陣標(biāo)度及其含義見表2。
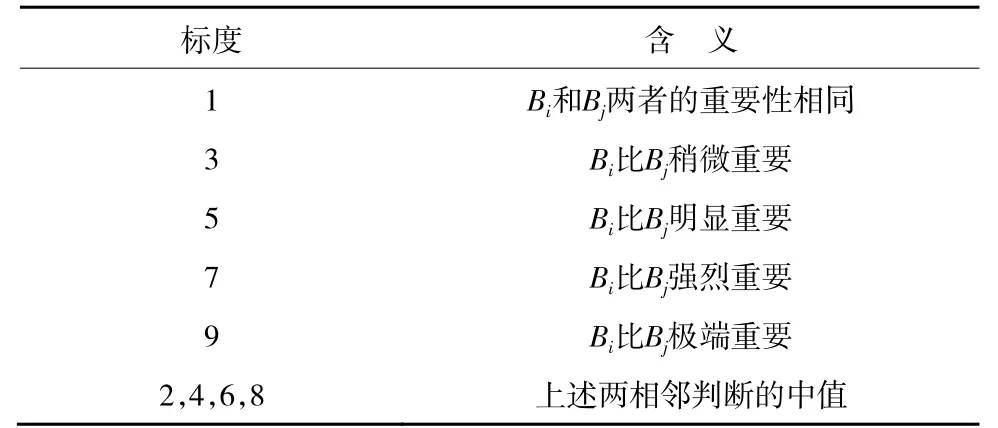
表2 判斷矩陣標(biāo)度及其含義Table 2 Judgment matrix scale and its meaning

圖1 智能化無人開采工作面適用性的多層次模糊綜合評(píng)價(jià)模型AFig.1 Multi-level fuzzy comprehensive evaluation model A for the applicability of intelligent unmanned mining face
層次分析法確定權(quán)重的步驟[14]如下:
( 1 ) 構(gòu)造判斷矩陣A。
( 2 ) 判斷矩陣的權(quán)重及最大特征根λmax。
① 計(jì)算判斷矩陣每一行元素的乘積Mi。

② 計(jì)算Mi的n次方根


④ 計(jì)算特征向量的最大特征根λmax。

式中,(AW )i表示向量AW 的第i個(gè)元素。

( 3 ) 判斷矩陣的一致性檢驗(yàn)。
① 計(jì)算一致性指標(biāo)CI。

② 計(jì)算平均隨機(jī)一致性指標(biāo)CR。

式中,RI表示同階平均隨機(jī)一致性指標(biāo),其值見表3。

表3 同階平均隨機(jī)一致性指標(biāo)Table 3 Mean random consistency index of the same order
當(dāng)CR≤0.1時(shí),可以認(rèn)定判斷矩陣與實(shí)際情況具有滿意的一致性,說明權(quán)重的選取是合理的;當(dāng)當(dāng)CR>0.1時(shí),認(rèn)為判斷矩陣與實(shí)際情況不具有一致性,需要重新確定判斷矩陣,直到判斷矩陣與實(shí)際情況具有滿意的一致性為止。
2.5 建立模糊關(guān)系矩陣
由于每一個(gè)單因素評(píng)價(jià)是隸屬關(guān)系矩陣的基礎(chǔ),因此在多個(gè)影響因素中,通過對(duì)其中1個(gè)具有代表性的影響因素作為評(píng)價(jià)因素進(jìn)行評(píng)價(jià),就可以確定單因素評(píng)價(jià)集。確定隸屬函數(shù)的方法主要有專家評(píng)分法、模糊統(tǒng)計(jì)法等,隸屬函數(shù)的選取是否合理直接影響評(píng)價(jià)結(jié)果的準(zhǔn)確性。礦井的地質(zhì)條件復(fù)雜多變,對(duì)因素集U中的各因素很難確定一致的隸屬函數(shù),所以通常采用專家評(píng)分法來建立模糊關(guān)系矩陣,邀請(qǐng)業(yè)界具有權(quán)威的專家和相關(guān)的工程技術(shù)人員根據(jù)評(píng)價(jià)等級(jí)V進(jìn)行打分[12-14],即對(duì)因素集U中的每一個(gè)因素進(jìn)行單獨(dú)評(píng)價(jià),再通過統(tǒng)計(jì)各評(píng)價(jià)等級(jí)打分的比例,從而得到此因素各評(píng)價(jià)等級(jí)對(duì)應(yīng)的比例,分析各個(gè)因素的評(píng)價(jià)等級(jí)比例可以得出相應(yīng)的模糊關(guān)系矩陣R。
3 工程實(shí)例分析
以陜西陜煤黃陵礦業(yè)有限公司1號(hào)煤礦802工作面為例進(jìn)行分析,1號(hào)煤礦802工作面煤層厚度1.5~3.2 m,平均煤層厚度約2.4 m,煤層埋深約314 m,占地面積約302 445 m2,工作面推進(jìn)長度1 287 m,煤傾角1°~5°。結(jié)構(gòu)簡單,屬于穩(wěn)定煤層。基本頂由細(xì)粒砂巖和粗砂巖組成,厚度5.79~11.98 m,平均厚度約7.89 m;直接頂由粉砂巖和泥巖組成,厚度9.18~11.79 m,平均厚度約10.45 m;2號(hào)煤煤層厚度1.5~3.2 m,平均厚度約2.4 m;底板為泥巖和粉砂巖,厚度2.85~5.91 m,平均厚度約3.95 m。
3.1 確定模糊綜合評(píng)價(jià)影響因素權(quán)重
確定模糊綜合評(píng)價(jià)一級(jí)影響因素權(quán)重的方法如下:
( 1 ) 構(gòu)造判斷矩陣A。
構(gòu)造判斷矩陣A,詳見表4。
( 2 ) 由式( 2 )~( 5 )計(jì)算可得,矩陣的最大特征值為,一級(jí)影響因素的權(quán)重為


表4 判斷矩陣ATable 4 Judgment matrix A
( 3 ) 由式( 6 )和( 7 )計(jì)算可得,C R =0.07<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A 具有滿意的一致性。
同理可得,智能化無人開采工作面適用性的模糊綜合評(píng)價(jià)的二級(jí)影響因素權(quán)重。
( 1 ) 判斷矩陣A1。
判斷矩陣A1詳見表5。

表5 判斷矩陣A1Table 5 Judgment matrix A1

由式( 6 )和( 7 )計(jì)算可得,C R =0.09<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A1具有滿意的一致性。
( 2 ) 判斷矩陣A2。
判斷矩陣A2詳見表6。

表6 判斷矩陣A2Table 6 Judgment matrix A2

由式( 6 )和( 7 )計(jì)算可得,C R =0.04<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A2具有滿意的一致性。
( 3 ) 判斷矩陣A3。
判斷矩陣A3詳見表7。

表7 判斷矩陣A3Table 7 Judgment matrix A3

由式( 6 )和( 7 )計(jì)算可得,C R =0.05<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A3具有滿意的一致性。
( 4 ) 判斷矩陣A4。
判斷矩陣A4詳見表8。

表8 判斷矩陣A4Table 8 Judgment matrix A4

由式( 6 )和( 7 )計(jì)算可得,C R =0.00<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A4具有滿意的一致性。
( 5 ) 判斷矩陣A5。
判斷矩陣A5詳見表9。

表9 判斷矩陣A5Table 9 Judgment matrix A5

由式( 6 )和( 7 )計(jì)算可得,C R =0.03<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A5具有滿意的一致性。
( 6 ) 判斷矩陣A6。
判斷矩陣A6詳見表10。
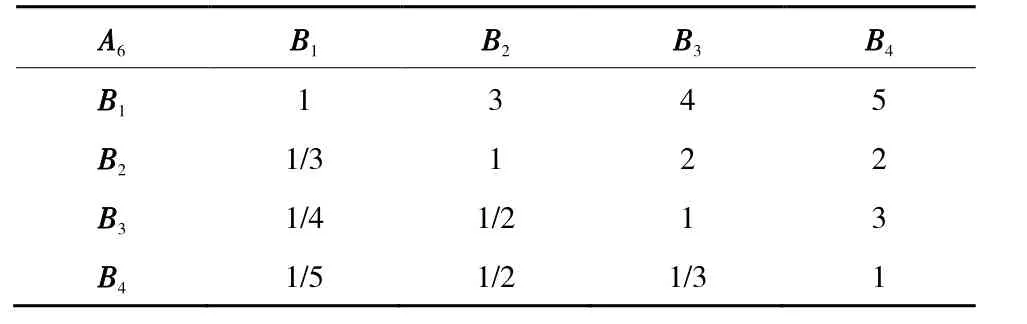
表10 判斷矩陣A6Table 10 Judgment matrix A6
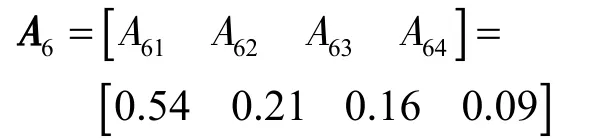
由式( 6 )和( 7 )計(jì)算可得,C R =0.05<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A6具有滿意的一致性。
( 7 ) 判斷矩陣A7。
判斷矩陣A7詳見表11。,評(píng)價(jià)因素的權(quán)重為

表11 判斷矩陣A7Table 11 Judgment matrix A7
由式( 2 )~( 5 )計(jì)算可得,

由式( 6 )和( 7 )計(jì)算可得,C R =0.00<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A7具有滿意的一致性。
( 8 ) 判斷矩陣A8。
判斷矩陣A8詳見表12。
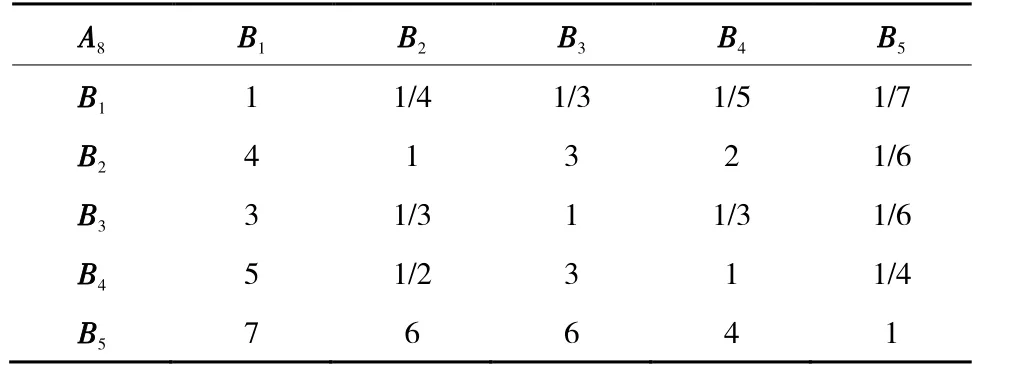
表12 判斷矩陣A8Table 12 Judgment matrix A8

由式( 6 )和( 7 )計(jì)算可得,C R =0.08<0.1,經(jīng)判斷矩陣一致性檢驗(yàn)可知,A8具有滿意的一致性。
通過專家評(píng)分法確定的8個(gè)單因素評(píng)判矩陣分別為
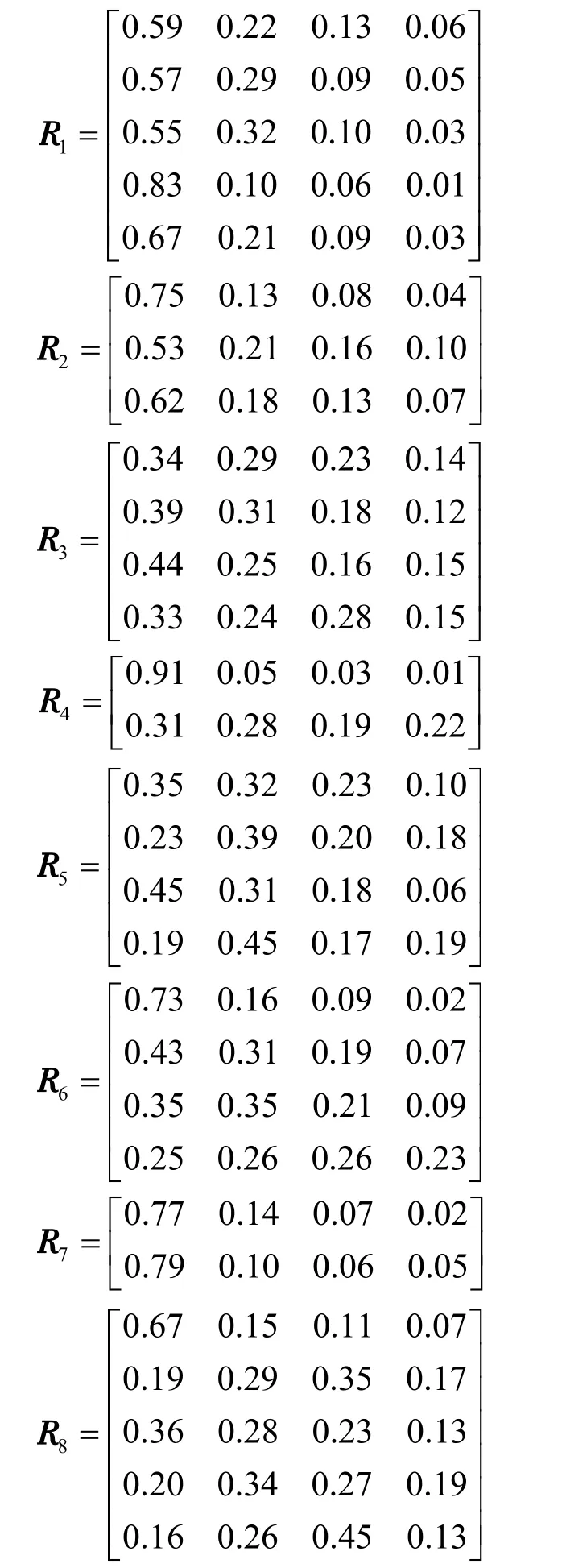
3.2 模糊綜合評(píng)價(jià)
3.2.1 一級(jí)模糊綜合評(píng)價(jià)
令


將計(jì)算得到的B1,B2,B3,B4,B5,B6,B7,B8作為上一級(jí)評(píng)價(jià)判斷矩陣R,并經(jīng)過模糊模型變換。
3.2.2 二級(jí)模糊綜合評(píng)價(jià)
已知

通過分析陜西陜煤黃陵礦業(yè)有限公司1號(hào)煤礦802工作面的評(píng)價(jià)影響因素,并且根據(jù)最大隸屬度關(guān)系原則可知:1號(hào)煤礦802工作面的最大隸屬度指數(shù)x= 0.64,其隸屬度指數(shù)評(píng)價(jià)如圖2所示。
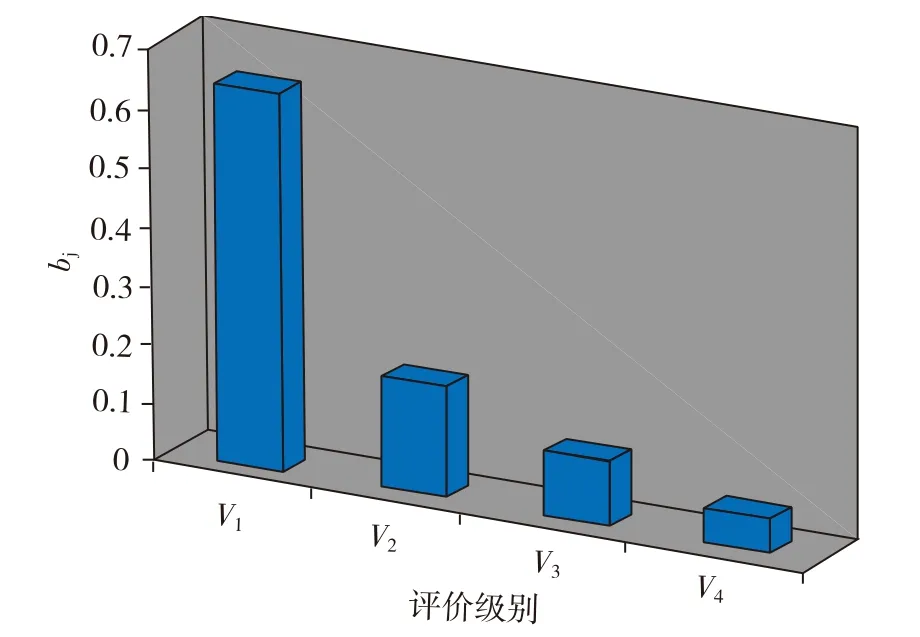
圖2 802工作面智能化無人開采適用性隸屬度指數(shù)評(píng)價(jià)Fig.2 Evaluation chart of applicability membership index of intelligent unmanned mining in 802 working face
1號(hào)煤礦802工作面智能化無人開采工作面的適用性模糊綜合評(píng)價(jià)結(jié)果為好。所以該模糊綜合評(píng)價(jià)結(jié)果與陜西陜煤黃陵礦業(yè)有限公司1號(hào)煤礦802工作面現(xiàn)場(chǎng)( 圖3 )智能化無人開采工作面的適用性結(jié)果相吻合。
4 結(jié)論與展望
( 1 ) 評(píng)價(jià)選取8個(gè)一級(jí)指標(biāo)和29個(gè)二級(jí)指標(biāo),對(duì)802工作面智能化無人開采適用性進(jìn)行評(píng)價(jià),8個(gè)一級(jí)指標(biāo)對(duì)應(yīng)的影響因素為地質(zhì)條件、巷道布置體系、開采參數(shù)、采煤工藝、裝備配套、關(guān)鍵技術(shù)、保障體系和組織管理。

圖3 802智能化無人開采工作面現(xiàn)場(chǎng)應(yīng)用效果Fig.3 Field application effect of intelligent unmanned mining in 802 working face
( 2 ) 提出了智能化無人開采適用性的多層次模糊綜合評(píng)價(jià)模型。多層次模糊綜合評(píng)價(jià)法能夠考慮多因素情況下智能化無人開采工作面適應(yīng)性的問題,確定各種評(píng)判因素之間的權(quán)重,評(píng)價(jià)方法完善,評(píng)價(jià)結(jié)果準(zhǔn)確科學(xué)。通過實(shí)例分析表明,該模型評(píng)判結(jié)果較為合理,接近智能化無人開采工作面適用性的實(shí)際情況,為評(píng)價(jià)智能化無人開采工作面適用性提供了一條新的途徑。( 3 ) 在未來可將層次分析模糊綜合評(píng)價(jià)法與智能化無人開采相結(jié)合,構(gòu)建一套智能化評(píng)價(jià)系統(tǒng),通過選取影響工作面的評(píng)價(jià)指標(biāo),自動(dòng)計(jì)算出影響因素的權(quán)重值。還可利用灰色理論和神經(jīng)網(wǎng)絡(luò)等評(píng)價(jià)方法構(gòu)建數(shù)據(jù)庫,借助人工智能技術(shù)進(jìn)行分析,得到更加準(zhǔn)確的結(jié)果。
參考文獻(xiàn)( References ):
[1] 王國法,龐義輝,任懷偉.煤礦智能化開采模式與技術(shù)路徑[J].采礦與巖層控制工程學(xué)報(bào),2020,2( 1 ):013501.WANG Guofa,PANG Yihui,REN Huaiwei.Intelligent coal mining pattern and technological path[J].Journal of Mining and Strata Control Engineering,2020,2( 1 ):013501.
[2] 任懷偉,王國法,趙國瑞,等.智慧煤礦信息邏輯模型及開采系統(tǒng)決策控制方法[J].煤炭學(xué)報(bào),2019,44( 9 ):2923-2935.REN Huaiwei,WANG Guofa,ZHAO Guorui,et al.Smart coal mine logic model and decision control method of mining system[J].Journal of China Coal Society,2019,44( 9 ):2923-2935.
[3] 范京道,徐建軍,張玉良,等.不同煤層地質(zhì)條件下智能化無人綜采技術(shù)[J].煤炭科學(xué)技術(shù),2019,47( 3 ):48-57.FAN Jingdao,XU Jianjun,ZHANG Yuliang,et al.Intelligent unmanned fully-mechanized mining technology under conditions of different seams geology[J].Coal Science and Technology,2019,47( 3 ):48-57.
[4] 李首濱.煤炭智能化無人開采的現(xiàn)狀與展望[J].中國煤炭,2019,45( 4 ):7-14.LI Shoubin.Present situation and prospect on intelligent unmanned mining at work face[J].China Coal,2019,45( 4 ):7-14.
[5] 王國法,范京道,徐亞軍,等.煤炭智能化開采關(guān)鍵技術(shù)創(chuàng)新進(jìn)展與展望[J].工礦自動(dòng)化,2018,44( 2 ):5-12.WANG Guofa,F(xiàn)AN Jingdao,XU Yajun,et al.Innovation progress and prospect on key technologies of intelligent coal mining[J].Industry and Mine Automation,2018,44( 2 ):5-12.
[6] 黃曾華.可視遠(yuǎn)程干預(yù)無人化開采技術(shù)研究[J].煤炭科學(xué)技術(shù),2016,44( 10 ):131-135,187.HUANG Zenghua.Study on unmanned mining technology with visualized remote interference[J].Coal Science and Technology,2016,44( 10 ):131-135,187.
[7] 王國法,杜毅博.智慧煤礦與智能化開采技術(shù)的發(fā)展方向[J].煤炭科學(xué)技術(shù),2019,47( 1 ):1-10.WANG Guofa,DU Yibo.Development direction of intelligent coal mine and intelligent mining technology[J].Coal Science and Technology,2019,47( 1 ):1-10.
[8] 張科學(xué).綜掘工作面智能化開采技術(shù)研究[J].煤炭科學(xué)技術(shù),2017,45( 7 ):106-111.ZHANG Kexue.Study on intelligent mining technology of fullymechanized heading face[J].Coal Science and Technology,2017,45( 7 ):106-111.
[9] 張科學(xué),李首濱,何滿潮,等.智能化無人開采系列關(guān)鍵技術(shù)之一——綜采智能化工作面調(diào)斜控制技術(shù)研究[J].煤炭科學(xué)技術(shù),2018,46( 1 ):139-149.ZHANG Kexue,LI Shoubin,HE Manchao,et al.Study on key technologies of intelligent unmanned coal mining seriesI :study on diagonal adjustment control technology of intelligent fully-mechanized coal mining face[J].Coal Science and Technology,2018,46( 1 ):139-149.
[10] 王國法,張德生.煤炭智能化綜采技術(shù)創(chuàng)新實(shí)踐與發(fā)展展望[J].中國礦業(yè)大學(xué)學(xué)報(bào),2018,47( 3 ):459-467.WANG Guofa,ZHANG Desheng.Innovation practice and development prospect of intelligent fully mechanized technology for coal mining[J].Journal of China University of Mining & Technology,2018,47( 3 ):459-467.
[11] 范京道.煤礦智能化開采技術(shù)創(chuàng)新與發(fā)展[J].煤炭科學(xué)技術(shù),2017,45( 9 ):65-71.FAN Jingdao.Innovation and development of intelligent mining technology in coal mine[J].Coal Science and Technology,2017,45( 9 ):65-71.
[12] 李寧,王李管,賈明濤.基于層次分析法的礦井六大系統(tǒng)模糊綜合評(píng)價(jià)[J].中南大學(xué)學(xué)報(bào)( 自然科學(xué)版 ),2015,46( 2 ):631-637.LI Ning,WANG Liguan,JIA Mingtao.An analytic hierarchy process based fuzzy evaluation of underground mine six-system[J].Journal of Central South University ( Science and Technology ),2015,46( 2 ):631-637.
[13] 王旭,霍德利.模糊綜合評(píng)價(jià)法在煤礦安全評(píng)價(jià)中的應(yīng)用[J].中國礦業(yè),2008( 5 ):75-78.WANG Xu,HUO Deli.Application of fuzzy comprehensive evaluation in coal safety assessment[J].China Mining Magazine,2008( 5 ):75-78.
[14] 張科學(xué),柏建彪,郝云新,等.煤巷錨桿支護(hù)效果的多層次模糊綜合評(píng)價(jià)[J].煤炭科學(xué)技術(shù),2010,38( 8 ):10-14.ZHANG Kexue,BAI Jianbiao,HAO Yunxin,et al.Multi-level fuzzy comprehensive evaluation of bolt support effect of seam gateway[J].Coal Science and Technology,2010,38( 8 ):10-14.
[15] 易恩兵,牟宗龍,竇林名,等.沖擊礦壓危險(xiǎn)性的模糊綜合評(píng)價(jià)研究[J].煤炭工程,2011,43( 6 ):70-73.YI Enbing,MU Zonglong,DOU Linming,et al.Study on fuzzy comprehensive evaluation on mine pressure bumping dangers[J].Coal Engineering,2011,43( 6 ):70-73.
[16] 朱珍,張科學(xué),何滿潮,等.無煤柱無掘巷開采自成巷道圍巖結(jié)構(gòu)控制及工程應(yīng)用[J].煤炭學(xué)報(bào),2018,43( S1 ):58-66.ZHU Zhen,ZHANG Kexue,HE Manchao,et al.Surrounding rocks control technology and application of automatically formed roadway in mining without coal pillar and gateroad excavation[J].Journal of China Coal Society,2018,43( S1 ):58-66.
[17] 何滿潮,宋振騏,王安,等.長壁開采切頂短壁梁理論及其110工法——第三次礦業(yè)科學(xué)技術(shù)變革[J].煤炭科技,2017( 1 ):1-9,13.HE Manchao,SONG Zhenqi,WANG An,et al.Theory of longwall mining by using roof cutting shortwall team and 110 method-the third mining science and technology reform[J].Coal Science & Technology Magazine,2017( 1 ):1-9,13.
[18] 王亞軍,何滿潮,張科學(xué),等.切頂卸壓無煤柱自成巷開采巷道礦壓顯現(xiàn)特征及其控制對(duì)策[J].采礦與安全工程學(xué)報(bào),2018,35( 4 ):677-685.WANG Yajun,HE Manchao,ZHANG Kexue,et al.Strata behavior characteristics and control countermeasures for the gateroad surroundings in innovative non-pillar mining method with gateroad formed automatically[J].Joumal of Mining & Safety Engincering,2018,35( 4 ):677-685.
[19] 朱珍,張科學(xué),袁紅平.切頂卸壓沿空留巷碎石巷幫控制技術(shù)及工程應(yīng)用[J].煤炭科學(xué)技術(shù),2018,46( 3 ):1-7.ZHU Zhen,ZHANG Kexue,YUAN Hongping.Control technology and its application of roadway side wall formed by gangue in gob-side entry retaining formed by roof cutting and pressure releasing[J].Coal Science and Technology,2018,46( 3 ):1-7.
[20] 朱珍,袁紅平,張科學(xué),等.基于切頂卸壓無煤柱自成巷頂板下沉分析及控制技術(shù)[J].煤炭科學(xué)技術(shù),2018,46( 11 ):1-7.ZHU Zhen,YUAN Hongping,ZHANG Kexue,et al.Analysis and control technology of roof subsidence in non-pillar gob-side entry retaining formed by roof cutting and pressure release[J].Coal Science and Technology,2018,46( 11 ):1-7.
[21] 黃樂亭,黃曾華,張科學(xué).大采高綜采智能化工作面開采關(guān)鍵技術(shù)研究[J].煤礦開采,2016,21( 1 ):1-6.HUANG Leting,HUANG Zenghua,ZHANG Kexue.Key technology of mining intelligent fully mechanized coal mining face with large mining height[J].Coal Mining Technology,2016,21( 1 ):1-6.
[22] 黃曾華,南柄飛,張科學(xué),等.基于Ethernet/IP綜采機(jī)器人一體化智能控制平臺(tái)設(shè)計(jì)[J].煤炭科學(xué)技術(shù),2017,45( 5 ):9-15.HUANG Zenghua,NAN Bingfei,ZHANG Kexue,et al.Design on intelligent control platform of mechanized mining robot based on Ethernet/IP[J].Coal Science and Technology,2017,45( 5 ):9-15.
[23] 王國法,趙國瑞,任懷偉.智慧煤礦與智能化開采關(guān)鍵核心技術(shù)分析[J].煤炭學(xué)報(bào),2019,44( 1 ):41-48.WANG Guofa,ZHAO Guorui,REN Huaiwei.Analysis on key technologies of intelligent coal mine and intelligent mining[J].Journal of China Coal Society,2019,44( 1 ):41-48.
[24] 孫繼平.煤礦信息化與智能化要求與關(guān)鍵技術(shù)[J].煤炭科學(xué)技術(shù),2014,42( 9 ):22-25.SUN Jiping.Requirement and key technology on mine informationlization and intelligent technology[J].Coal Science and Technology,2014,42( 9 ):22-25.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
石油瀝青(2021年4期)2021-10-14 08:50:44
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
中國交通信息化(2017年4期)2017-06-06 07:21:52
燕山大學(xué)學(xué)報(bào)(2015年4期)2015-12-25 02:19:49
能源(2015年8期)2015-05-26 09:15:56
中國教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
