基于模糊神經(jīng)網(wǎng)絡(luò)的碼頭結(jié)構(gòu)健康監(jiān)測(cè)研究
2021-11-21 04:17:18陳靜
水道港口 2021年4期
關(guān)鍵詞:結(jié)構(gòu)系統(tǒng)
陳 靜
(交通運(yùn)輸部天津水運(yùn)工程科學(xué)研究所 水工構(gòu)造物檢測(cè)、診斷與加固技術(shù)交通行業(yè)重點(diǎn)實(shí)驗(yàn)室,天津 300456)
結(jié)構(gòu)健康監(jiān)測(cè)技術(shù)是利用現(xiàn)場(chǎng)的無損傳感與結(jié)構(gòu)系統(tǒng)特性分析(包括結(jié)構(gòu)反應(yīng))、探測(cè)結(jié)構(gòu)的性態(tài)變化揭示結(jié)構(gòu)損傷與結(jié)構(gòu)性能劣化。也就是通過對(duì)結(jié)構(gòu)的物理力學(xué)性能進(jìn)行無損監(jiān)測(cè),實(shí)時(shí)監(jiān)控結(jié)構(gòu)的整體行為,對(duì)結(jié)構(gòu)的損傷位置和程度進(jìn)行診斷,對(duì)結(jié)構(gòu)的服役情況、可靠性、耐久性和承載能力進(jìn)行智能評(píng)估,為結(jié)構(gòu)在突發(fā)事件下或結(jié)構(gòu)使用狀況嚴(yán)重異常時(shí)觸發(fā)預(yù)警信號(hào),為結(jié)構(gòu)的維修、養(yǎng)護(hù)與管理決策提供依據(jù)和指導(dǎo)[1-2]。
近年來,我國港口基礎(chǔ)設(shè)施的規(guī)模、港口吞吐能力、港口服務(wù)水平、港口結(jié)構(gòu)布局得到了不斷提升,但同時(shí)也存在著很多碼頭已經(jīng)服役數(shù)十年的狀況,老舊碼頭的加固與改造問題亟待解決。
隨著數(shù)據(jù)處理和數(shù)值分析技術(shù)、實(shí)時(shí)結(jié)構(gòu)監(jiān)測(cè)系統(tǒng)和安全性的高速發(fā)展,傳感器技術(shù)和物聯(lián)網(wǎng)技術(shù)向智能化發(fā)展。結(jié)構(gòu)健康監(jiān)測(cè)系統(tǒng)已廣泛應(yīng)用于各個(gè)領(lǐng)域。區(qū)別于傳統(tǒng)的無損檢測(cè)技術(shù)是根據(jù)結(jié)構(gòu)在同一位置上不同時(shí)間的測(cè)量結(jié)果的變化來識(shí)別結(jié)構(gòu)的狀態(tài),碼頭結(jié)構(gòu)健康監(jiān)測(cè)技術(shù)運(yùn)用直接測(cè)量確定結(jié)構(gòu)的物理狀態(tài),無需歷史記錄數(shù)據(jù),診斷結(jié)果很大程度上取決于測(cè)量設(shè)備的分辨率和精度[3]。
碼頭結(jié)構(gòu)的監(jiān)測(cè)參數(shù)主要包括應(yīng)力應(yīng)變、整體沉降、相對(duì)位移等,監(jiān)測(cè)數(shù)據(jù)的獲取仍然依賴于各種傳感器。然而,由于碼頭長度的差異、傳感器的安裝和維護(hù)成本昂貴以及傳感器信號(hào)不穩(wěn)定等因素導(dǎo)致所獲取的數(shù)據(jù)不準(zhǔn)確,導(dǎo)致難以有效地對(duì)碼頭結(jié)構(gòu)的健康狀況進(jìn)行準(zhǔn)確判定[4-5]。
為提高結(jié)構(gòu)監(jiān)測(cè)數(shù)據(jù)的準(zhǔn)確性,本文提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的數(shù)據(jù)融合技術(shù),即通過無線傳感器網(wǎng)絡(luò),利用模糊神經(jīng)網(wǎng)絡(luò)的無線映射能力、較強(qiáng)的環(huán)境自適應(yīng)學(xué)習(xí)能力和穩(wěn)定性,搭建模糊神經(jīng)網(wǎng)絡(luò)模型實(shí)現(xiàn)數(shù)據(jù)融合。
1 無線傳感器網(wǎng)絡(luò)擴(kuò)展結(jié)構(gòu)
無線傳感器網(wǎng)絡(luò)技術(shù)不斷向低功耗和低成本發(fā)展,在碼頭結(jié)構(gòu)監(jiān)測(cè)的無線傳感器網(wǎng)絡(luò)中具有明顯的優(yōu)勢(shì)。
無線傳感器網(wǎng)絡(luò)由三部分組成,分別是傳感器層、數(shù)據(jù)收集和傳輸層以及數(shù)據(jù)應(yīng)用層,如圖1所示[6]。在傳感器層、各種傳感器分布在碼頭結(jié)構(gòu)的關(guān)鍵點(diǎn)(即監(jiān)控點(diǎn))。第二層是從傳感器收集數(shù)據(jù)并進(jìn)行遠(yuǎn)程傳輸?shù)綌?shù)據(jù)中心。通常數(shù)據(jù)中心是服務(wù)器或云存儲(chǔ)。數(shù)據(jù)應(yīng)用層對(duì)數(shù)據(jù)進(jìn)行顯示和進(jìn)一步分析。在研究中模糊神經(jīng)網(wǎng)絡(luò)被嵌入到無線傳感器網(wǎng)絡(luò)中。

圖1 網(wǎng)絡(luò)體系結(jié)構(gòu)Fig.1 Network architecture
2 模糊神經(jīng)網(wǎng)絡(luò)
2.1 數(shù)據(jù)預(yù)處理和特征參數(shù)提取
模糊神經(jīng)網(wǎng)絡(luò)具有無線映射能力、較強(qiáng)的環(huán)境自適應(yīng)學(xué)習(xí)能力和魯棒性。因此健康監(jiān)測(cè)有可能將目前廣泛采用的離線、靜態(tài)、被動(dòng)的損傷檢測(cè),轉(zhuǎn)變?yōu)樵诰€、動(dòng)態(tài)、實(shí)時(shí)的監(jiān)測(cè)與控制,這將導(dǎo)致工程結(jié)構(gòu)安全監(jiān)控、減災(zāi)防災(zāi)領(lǐng)域的一場(chǎng)革命[7-8]。然而,僅使用模糊神經(jīng)網(wǎng)絡(luò)來檢測(cè)結(jié)構(gòu)的損壞具有易于誤診和漏診的缺點(diǎn)。
為了充分利用從監(jiān)控系統(tǒng)中收集到的大量數(shù)據(jù),本文提出了一種基于數(shù)據(jù)融合技術(shù)的數(shù)據(jù)處理方法,該方法可以利用冗余和補(bǔ)充信息來評(píng)估結(jié)構(gòu)的健康狀況,如圖2所示。

圖2 損傷檢測(cè)Fig.2 Damage detection
結(jié)構(gòu)監(jiān)測(cè)系統(tǒng)的響應(yīng)參數(shù)可以分為三種,分別是頻率信號(hào)、模擬信號(hào)和數(shù)字信號(hào)[9]。同時(shí),在環(huán)境和監(jiān)測(cè)儀器的影響下,實(shí)際測(cè)量參數(shù)中包含噪聲和誤差,在數(shù)據(jù)預(yù)處理中,首先將數(shù)據(jù)轉(zhuǎn)換為數(shù)字信號(hào)形式,然后使用平均值法和閾值法等處理原始信息去除噪音。
結(jié)構(gòu)振動(dòng)參數(shù)是重要的監(jiān)測(cè)指標(biāo)。振動(dòng)傳感器輸出的信號(hào)為模擬信號(hào),轉(zhuǎn)換為數(shù)字信號(hào)后,特征提取過程采用傅立葉變換使數(shù)據(jù)在頻域中表示[10]。經(jīng)典傅立葉轉(zhuǎn)換公式可將模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),如式(1)所示。
(1)
在實(shí)際應(yīng)用中,需使用離散傅立葉級(jí)數(shù)對(duì)信號(hào)進(jìn)行分析,如式(2)所示。
(2)
在數(shù)據(jù)預(yù)處理和特征提取后,數(shù)據(jù)信息全部變?yōu)閿?shù)字信號(hào),并通過傅立葉變換將振動(dòng)信號(hào)以頻域的形式表達(dá)。這種數(shù)據(jù)預(yù)處理將對(duì)后續(xù)的處理帶來便利。
2.2 模糊神經(jīng)網(wǎng)絡(luò)模型
模糊神經(jīng)網(wǎng)絡(luò)通常由模糊化功能、神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)和去模糊化功能組成[11],如圖3所示。

圖3 模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.3 Fuzzy neural network structure
在圖3中,模糊神經(jīng)網(wǎng)絡(luò)是五層結(jié)構(gòu),第一層是傳感器輸入層。其中每個(gè)神經(jīng)元對(duì)應(yīng)于代表傳感器輸入數(shù)據(jù)的輸入變量,每個(gè)神經(jīng)元將數(shù)據(jù)直接傳遞到第二層神經(jīng)元,層的權(quán)重為1。

y=Bj∈(j=1,2,…,R;i=1,2,…,n)
(3)
式(3)中的Bj是一種隸屬函數(shù),它可以轉(zhuǎn)變?yōu)槭?4)
y=yj(j=1,2,…,R)
(4)
假設(shè)j為y的隸屬函數(shù),則模糊系統(tǒng)可以用式(5)表示
(5)
其中μj可以表示為式(6)
(6)
第三層是隱藏層。該層的功能是實(shí)現(xiàn)輸入變量的模糊化值與輸出變量的模糊化值之間的映射。輸出的適應(yīng)度值如式(6)所示。
神經(jīng)網(wǎng)絡(luò)的第四層是輸出層。輸出的值是式(5)的分子和分母。該值對(duì)應(yīng)于結(jié)構(gòu)的損壞模式,同時(shí)第四層和第五層共同完成去模糊功能。
模糊神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)需要兩個(gè)步驟。首先,初始化每個(gè)節(jié)點(diǎn)的值,主要是設(shè)置參數(shù)。其次,通過系統(tǒng)學(xué)習(xí)輸入和輸出樣本,建立逼近模糊非線性函數(shù)的映射關(guān)系。
2.3 神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)算法
BP神經(jīng)網(wǎng)絡(luò)算法是一種制導(dǎo)算法,它包括正向和反向計(jì)算步驟。假設(shè)學(xué)習(xí)樣本的數(shù)量n,輸入向量是x=(x1,x2,…,xn)T,期望的輸出是Y=(Y1,Y2,…,Yn)T,Opi是單位i的輸出,Wij是網(wǎng)絡(luò)的權(quán)重值,δ是誤差信號(hào),θi是閾值,學(xué)習(xí)步驟如下所示。
第一步是初始化網(wǎng)絡(luò)權(quán)重值Wij(0)和閾值θi,它們將被定義為區(qū)間[-1,1]內(nèi)的隨機(jī)數(shù)。
第二步是輸入學(xué)習(xí)樣本集{Xk,Yk},k=1,2,…,n。
第三步,傳遞函數(shù)是S形函數(shù),表達(dá)式如式(7)所示。
(7)

因此可以獲得網(wǎng)絡(luò)的輸出誤差
(8)
(9)
假設(shè)平均系統(tǒng)誤差容限為Es,單個(gè)樣本誤差容限為Eps。第四步是如果E≤Es或Ep≤Eps或達(dá)到指定的迭代步驟數(shù),則學(xué)習(xí)過程將結(jié)束。否則,誤差將繼續(xù)向后傳播,然后轉(zhuǎn)到第五步。
第五步是反向計(jì)算每個(gè)網(wǎng)絡(luò)單元的誤差。其中輸出層誤差如式(10)所示,隱藏層誤差如式(11)所示
δpj=Opj(1-Opj)(Tpj-Opj)
(10)
δpj=Opj(1-Opj)Σδpl-Wpl
(11)
第六步是計(jì)算權(quán)重和閾值的正確參數(shù),如式(12)和式(13)所示
△Wij(n+1)=ηδpjOpj+?△Wij(n)
(12)
△θj(n+1)=ηδpj+?△θj(n)
(13)
第七步是校正權(quán)重和閾值,如式(14)和式(15)所示
Wij(n+1)=Wij(n)+△Wij(n+1)
(14)
θj(n+1)=θj(n)+△θj(n+1)
(15)
整個(gè)神經(jīng)網(wǎng)絡(luò)的流程如圖4所示。

圖4 神經(jīng)網(wǎng)絡(luò)流程圖Fig.4 Flow chart of neural network
2.4 模糊神經(jīng)網(wǎng)絡(luò)訓(xùn)練樣本
為了使監(jiān)控系統(tǒng)有效運(yùn)行,建立準(zhǔn)確的訓(xùn)練樣本非常關(guān)鍵。通過研究樣本,系統(tǒng)將在輸入和輸出數(shù)據(jù)之間建立一個(gè)映射關(guān)系。通過精確的有限元方法可以獲得樣品。本文選擇天津某高樁碼頭前承臺(tái)典型結(jié)構(gòu),重點(diǎn)針對(duì)碼頭應(yīng)力應(yīng)變和樁體位移兩項(xiàng)數(shù)據(jù)進(jìn)行討論。選擇有限元分析軟件并將接觸元件類型設(shè)置為target170和contac173。使用經(jīng)典的Peter Drucker-prager模型選擇地面。
本文計(jì)算了模擬載荷并獲得了載荷-應(yīng)變關(guān)系,部分結(jié)果如表1所示。
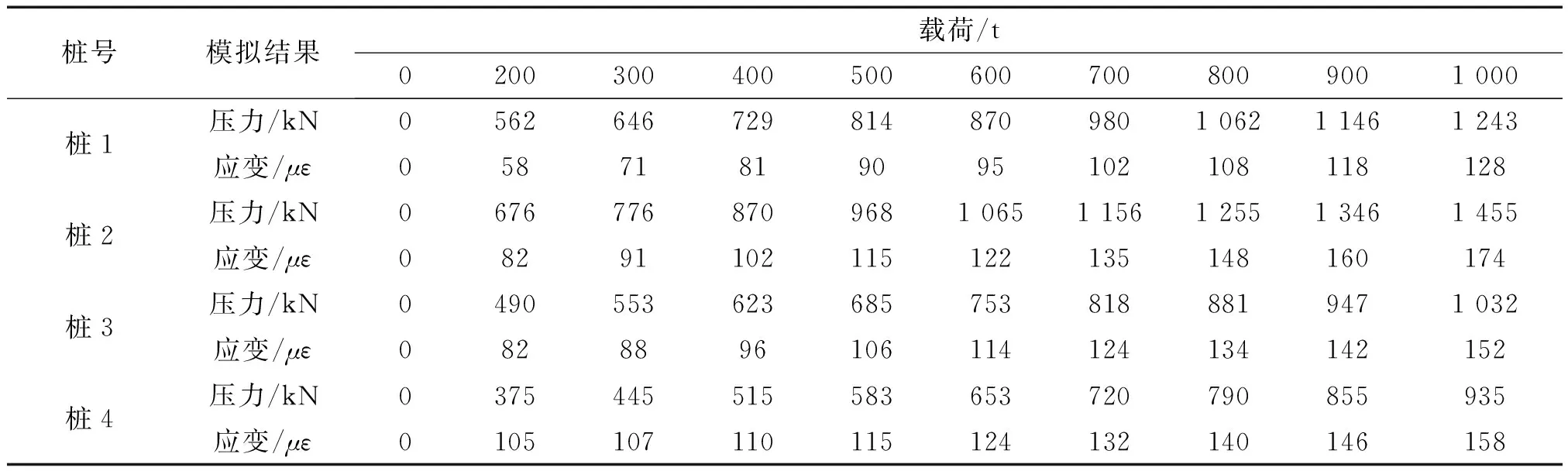
表1 軟件模擬應(yīng)變結(jié)果Tab.1 Software strain simulation results
在負(fù)載測(cè)試階段,本文采用了單點(diǎn)位移計(jì)測(cè)量方法。監(jiān)測(cè)點(diǎn)的載荷-應(yīng)變關(guān)系如表2所示。為了保證一致性,在有限元分析時(shí)監(jiān)測(cè)點(diǎn)與觀測(cè)點(diǎn)是一致的。

表2 應(yīng)變計(jì)測(cè)量結(jié)果Tab.2 Results of strain displacement meter measurement με
碼頭的樁僅看作承受軸向壓力,根據(jù)有關(guān)材料力學(xué)公式可知,壓力和應(yīng)變是線性關(guān)系的,見式(16)
σ=Egε,F(xiàn)=σgA
(16)
式中:σ為應(yīng)力,MPa;ε為應(yīng)變,με;F為壓力,kN;E為構(gòu)件材料彈性模量,MPa;A為構(gòu)件斷面積。該碼頭混凝土樁構(gòu)件的材料彈性模量E=3.35×104MPa,A=0.3 m2。
本文將模糊神經(jīng)網(wǎng)絡(luò)引入到結(jié)構(gòu)監(jiān)測(cè)系統(tǒng)中,最終的數(shù)據(jù)從智能算法得到,結(jié)果如表3所示。

表3 模糊神經(jīng)網(wǎng)絡(luò)計(jì)算結(jié)果Tab.3 Calculation results of fuzzy neural network με
為了驗(yàn)證計(jì)算數(shù)據(jù)的可行性,位移計(jì)測(cè)量數(shù)據(jù)與模糊神經(jīng)網(wǎng)絡(luò)產(chǎn)生的數(shù)據(jù)如圖5所示,將實(shí)際數(shù)據(jù)與模糊神經(jīng)網(wǎng)絡(luò)產(chǎn)生數(shù)據(jù)、有限元計(jì)算數(shù)據(jù)相比較,可知模糊神經(jīng)網(wǎng)絡(luò)產(chǎn)生數(shù)據(jù)更傾向于計(jì)算數(shù)據(jù)。另外,模糊神經(jīng)網(wǎng)絡(luò)可以更好地消除系統(tǒng)的噪聲和誤差。


圖5 不同方法下的數(shù)據(jù)處理結(jié)果Fig.5 Data processing results of different methods
3 結(jié)論
為解決結(jié)構(gòu)監(jiān)測(cè)系統(tǒng)數(shù)據(jù)的準(zhǔn)確性問題,本文采用無線傳感器網(wǎng)絡(luò),利用模糊神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)數(shù)據(jù)融合。提出了一種基于數(shù)據(jù)融合技術(shù)的五階段數(shù)據(jù)處理方法,由于模糊神經(jīng)網(wǎng)絡(luò)具有神經(jīng)網(wǎng)絡(luò)的無線映射能力、較強(qiáng)的環(huán)境自適應(yīng)學(xué)習(xí)能力和魯棒性,可以利用冗余和互補(bǔ)數(shù)據(jù)消除來自環(huán)境的噪聲和誤差。通過有限元分析方法獲得神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本,并將該系統(tǒng)應(yīng)用于無線傳感器網(wǎng)絡(luò),結(jié)果表明模糊神經(jīng)網(wǎng)絡(luò)在碼頭結(jié)構(gòu)監(jiān)測(cè)系統(tǒng)中具有優(yōu)勢(shì)和可行性,在實(shí)際應(yīng)用中可以獲得更準(zhǔn)確的數(shù)據(jù)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
