基于計算機視覺方法的輸電線路鐵塔關鍵部件位移監(jiān)測系統(tǒng)
2021-11-22 05:23:10國網(wǎng)江蘇省電力有限公司國網(wǎng)江蘇省電力有限公司徐州供電分公司周大炎
電力設備管理 2021年11期
國網(wǎng)江蘇省電力有限公司 徐 錸 國網(wǎng)江蘇省電力有限公司徐州供電分公司 劉 蕾 周大炎
在輸電線路施工立塔架線中,有些關鍵部位如地錨和高空塔材的位移和形變將對整個施工安全造成巨大影響。目前對這些關鍵點的位移實時監(jiān)測還只是停留在人工觀察水平,不能進行實時監(jiān)測并給出預警;缺乏可用于立塔架線施工的對地面或高空關鍵部件進行定位、并對位置信息進行實時監(jiān)測的裝置,因此亟需開展深入研究。
1 立塔施工關鍵部件位移監(jiān)測方法的選擇
為滿足輸電線路立塔施工關鍵部件位移監(jiān)測的需要,要求測量距離不小于100米,定位重復測量精度高于3cm,反應時間不大于2s,根據(jù)這些指標選擇關鍵部件位移監(jiān)測方法。目前主流的位移檢測方法可分為接觸式和非接觸式兩類,其中接觸式傳感器有拉繩式位移傳感器、加速度傳感器、角度傳感器、液位計乃至應變片等,這些方法常見于工程測量領域[1]。接觸式測量的優(yōu)點在于,不需要遠距離地觀測和苛刻的測試條件,直接布置在結構便可完成結構位移的測量,但這對于一些場合反而不方便,如高聳桿塔架構等,布置接觸式傳感器反而困難。
非接觸式結構位移測量方法主要有地面測繪時使用全站儀方法、基于全球定位系統(tǒng)(GPS)的測量方法、合成孔徑雷達(SAR)測量方法、激光雷達及地面測繪時使用全站儀和基于計算機視覺的測量方法等。傳統(tǒng)的全站儀方法在測量精度和自動化程度上不能滿足要求。GPS方法和SAR方法主要在應對人跡罕至或實地測量難度較大的場景,測試精度可達亞米尺度,但很難達到厘米級精度,一般主要用于地形地貌的監(jiān)測、高聳結構的位移測量等[2]。激光雷達通過發(fā)射和接收激光束,分析激光遇到目標對象后的折返時間,計算出到目標對象的相對距離,并利用此過程中收集到的目標對象表面大量密集的點的三維坐標、反射率和紋理等信息,快速得到出被測目標的三維模型以及線、面、體等各種相關數(shù)據(jù),建立三維點云測量設備具備非常高的精度。從效果上來講,激光雷達維度(線束)越多時間測量精度越高、距離測量精度也越高,但成本也越大,不適合輸電線路施工的成本要求。
相比以上方法,基于計算機視覺方法的結構位移測量方法以其全場性、系統(tǒng)簡便廉價性、高精度、快速性、非接觸性等優(yōu)勢,成為結構位移檢測中的一種重要方法[3]。一方面隨著相機分辨率的提升和成本的降低,視覺監(jiān)測的成本降低而像素分辨力大幅提升;另一方面隨著計算機視覺的飛速發(fā)展,以圖像計算位移的方法獲得長足發(fā)展,通過位移計算的后處理算法可以視覺方法的結構位移測量精度提升至像素乃至亞像素量級,其中基于圖像相關的方法配合人為處理的高質(zhì)量散斑表面,甚至可將計算精度提升到百分之一乃至千分之一像素精度[4]。經(jīng)過測算,當測量距離為120m時,使用普通的25mm鏡頭像素精度即可滿足3cm的要求。因此選用計算機視覺方法作為立塔施工關鍵部件位移監(jiān)測的方法。
2 基于計算機視覺方法的關鍵部件位移監(jiān)測系統(tǒng)組成和計算流程
基于計算機視覺方法的鐵塔位移監(jiān)測系統(tǒng)分為圖像采集、圖像處理和圖像識別三個模塊。計算系統(tǒng)硬件配置:處理器Intel Core I3-3110M,內(nèi)存8GB DDR3,硬盤空間500GB,顯卡NVIDIA GeForce GT 620M,網(wǎng)絡配置為寬帶網(wǎng)絡。操作系統(tǒng)Windows7 x64,開發(fā)工具Visual Studio 2017;OpenCV 3.4.0,開發(fā)語言C++。
圖像采集模塊包括電荷光學成像模塊和網(wǎng)絡傳輸模塊。光學成像模塊包括耦合器件(CCD)攝像頭和紅外模塊(包括光敏傳感器和紅外發(fā)射器)。攝像機快門速度1/60s至1/500s;分辨率800萬像素,幀率25fps(0.04s)。當光強大于0.02Lux時攝像頭為正常模式,直接利用外界自然光采集圖像。當光強小于0.02Lux時攝像頭自動切換為紅外模式,同時目標鐵塔上的光敏傳感器控制鐵塔若干目標點上的紅外發(fā)射器發(fā)射紅外光線,使得拍攝出的圖像較為清晰且突出特征。在電路系統(tǒng)采取信號采集單元脈沖同步、多路采集同步以及通訊傳輸同步等同步技術,提高實時性。網(wǎng)絡協(xié)議采用TCP/IP協(xié)議,通用性強。由于計算機需要識別電信號,故將CCD模塊采集到的模擬信號和時序信號通過A/D轉換器轉換為電信號經(jīng)USB2.0接口傳輸給計算機,確保了整個過程的穩(wěn)定性,通過同步技術及480M帶寬的USB2.0接口等提高了傳輸?shù)膶崟r性。
圖像處理模塊使用通用預處理流程進行灰度化及平坦化。選用高斯濾波進行圖像增強,精度高、實時性好。當光強大于0.02Lux時無需對圖像進行其他處理。光強小于0.02Lux時,需根據(jù)需求執(zhí)行暗通道先驗去霧算法或Retinex算法來進行相應處理,使圖像更為清晰、突出重點,便于后續(xù)圖像識別。
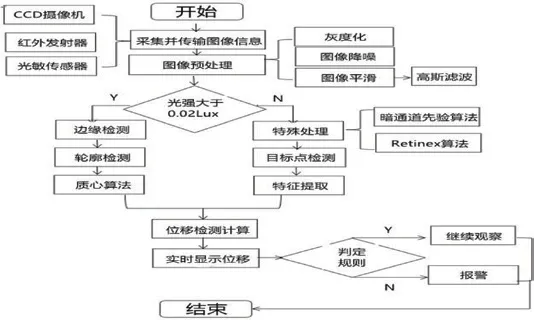
圖1 關鍵部件位移監(jiān)測系統(tǒng)計算流程
圖像識別模塊計算關鍵部件的位移。當光強大于0.02Lux時,首先使用Canny算法進行邊緣檢測,然后進行外輪廓檢測及提取,最后提取出圖像的質(zhì)心坐標,通過計算相鄰圖像間質(zhì)心坐標差,結合攝像比例尺求出實際位移。當光強小于0.02Lux時采用特征點提取檢測方案。在圖像中選取感興趣部分(ROI區(qū)域),降低時間復雜度,在特征點檢測時選用AKAZE算法,結合特征點描述的ORB算法同時對特征點進行提取,得到相應信息。最后運用位移視差算法計算位移。得到的位移量與安全閾值進行比較,若超出其范圍則根據(jù)一定的判定規(guī)則給出繼續(xù)觀察、報警等措施。
3 基于計算機視覺方法的位移監(jiān)測系統(tǒng)的測試和應用
基于上述方案,開發(fā)了一套基于計算機視覺方法的位移監(jiān)測系統(tǒng),并對實際鐵塔的監(jiān)測點的位移進行了監(jiān)測,部分結果如圖2所示。
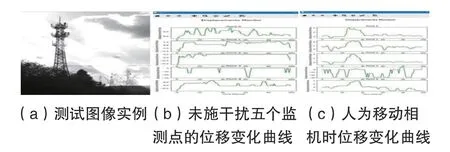
圖2 基于計算機視覺方法的位移監(jiān)測系統(tǒng)測試結果
從圖中可看出,除第四個監(jiān)測點偶爾出現(xiàn)跳動誤差外,其余四個監(jiān)測點均達到良好效果。在有人為移動相機模擬干擾和故障情況時,系統(tǒng)也能做出正確反映。最終測試的位移誤差在迎光拍攝、背景干擾較大時仍能取被控制在單個像素之內(nèi)。像素分辨率達到了2cm,證明提出的計算機視覺方法對位移實時、精確的監(jiān)測有效,所開發(fā)的位移監(jiān)測系統(tǒng)及系統(tǒng)中使用的方案和算法能夠滿足要求,可用于對輸電線路鐵塔及其它類型的建筑關鍵部位在施工和運營過程中的位移進行實時、精確的監(jiān)測。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
消費導刊(2017年20期)2018-01-03 06:26:40
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56