
基于微電源輸出功率的微電網自適應電流保護*
2021-11-23 08:09:50糟偉紅
機電工程技術 2021年10期
關鍵詞:故障
糟偉紅,袁 至
(新疆大學可再生能源發電與并網控制教育部工程研究中心,烏魯木齊 830047)
0 引言
微電網是獨立的供電系統,與傳統電網相比存在網絡拓撲結構多變、運行模式可變、潮流流向不確定等特點[1]。使傳統繼電保護方法難以滿足微電網的保護[2-3]。
目前對微電網保護的研究主要有:(1)基于本地信息的保護。李滿禮等[4-6]提出了基于本地電氣信息的自適應保護,并結合了廣域保護、集成保護、暫態極性保護等方法的一套綜合保護方法。但該方法針對的是單個分布式電源,未基于到微網結構復雜多變的特點。(2)基于智能通信的微網保護。王守相等[7-10]采用數學形態學、遺傳算法(Genetic Algorithm,GA)、相量測量單元(PMUs)和中央保護單元(CPU)、智能終端單元(Smart Terminal Unit,STU)等通信技術對微網進行保護。
因此,本文綜合基于了微網拓撲結構、運行模式多變及潮流方向不確定、微源輸出功率變化等因素對保護的影響,提出一種基于微源輸出功率的微電網自適應電流保護方案;對典型工況在PSCAD/EMTDC上進行了仿真驗證,結果表明該保護方案可靠保護微電網。
1 微電網拓撲及各處故障特性
1.1 微電網拓撲結構
根據IEEE1547標準以及美國電力可靠性技術方案解決協會(Consortium for Electric Reliability Technology Solutions,CERTS)對微電網的定義,并結合文中基于微源輸出功率的微電網自適應電流保護原理,建立如圖1所示的微電網簡化模型。圖中,電壓等級為10.5 kV,Load1-Load4均為三相對稱負載,WTG為風力發電微電源,PQ-DG為交流微電源,Storage Battery為儲能蓄電池,PV為光伏微電源。DSTU1-DSTU9_9為分布式智能配電終端裝置,F1~F9為微網饋線上不同位置發生的短路故障。

圖1 微電網簡化模型Fig.1 Thesimplified model of microgrid
1.2 微電網故障特性
圖1 所示為接入風、光、儲等微源的某微電網[11]。微電網通過饋線AB、BC、AD、DE、AF、AG向負荷供電;DSTU1-9_9分別為各段饋線的保護裝置。現以PQ-DG微源所在饋線為例,分析微網故障時的特性。首先,根據PQ-DG接入的位置,將該圖分為3部分,AB、BC段為上游部分,C母線到Load2之間為下游部分,AD、DE、AF、AG段均為相鄰饋線部分。具體如下。
(1)上游部分。由于PQ-DG接在中間母線C上,所以對上游來說,是雙電源供電。當上游處出現短路故障時,故障電流由主網和PQ-DG疊加產生,DSTU2會流過PQ-DG供應的反向電流,所以在母線C左側加裝了DSTU2_2,以防止這種情況發生。而且由于PQ-DG的接入,改變了線路的原有結構,單電源供電變為雙電源供電,使得實際流過DSTU2的電流減少,影響了保護2的靈敏度。
(2)下游部分。當F3處發生短路故障時,應由DSTU3動作,DSTU3的啟動值受配網電流和PQ-DG電流的影響。實際流過DSTU3的電流增大,影響DSTU3的靈敏度。
(3)相鄰饋線部分。若AD、DE、AF、AG段上某處出現短路故障,DSTU1、DSTU2將會受PQ-DG提供的反向故障電流的影響,使其可能會誤啟動。
2 微源輸出功率特性
文中采用的微網系統中微源有4個:光電、風電、交流微源、儲能裝置。
2.1 光伏電源的輸出特性
設日照輻射強度為1 000 W/m2,光伏電池熱度分別為25℃、35℃、45℃、60℃四種情況下的功率隨時間變化如圖2所示。從圖中可以看出,在0~0.08 s時,光伏發電發出的有功功率非常不穩定,此時隨著光伏電池溫度越的增大功率也增大;從0.08 s始,光伏發電發出的有功功率逐漸趨于穩定。

圖2 PV功率隨時間的變化曲線Fig.2 PV power changeswith time
2.2 風電電源的輸出特性
風力發電的能源是風能,風能是氣流變化所引起的。氣流變化的速度不同,風能不同,風速不同。圖3所示為風速與風機輸出功率之間的關系。
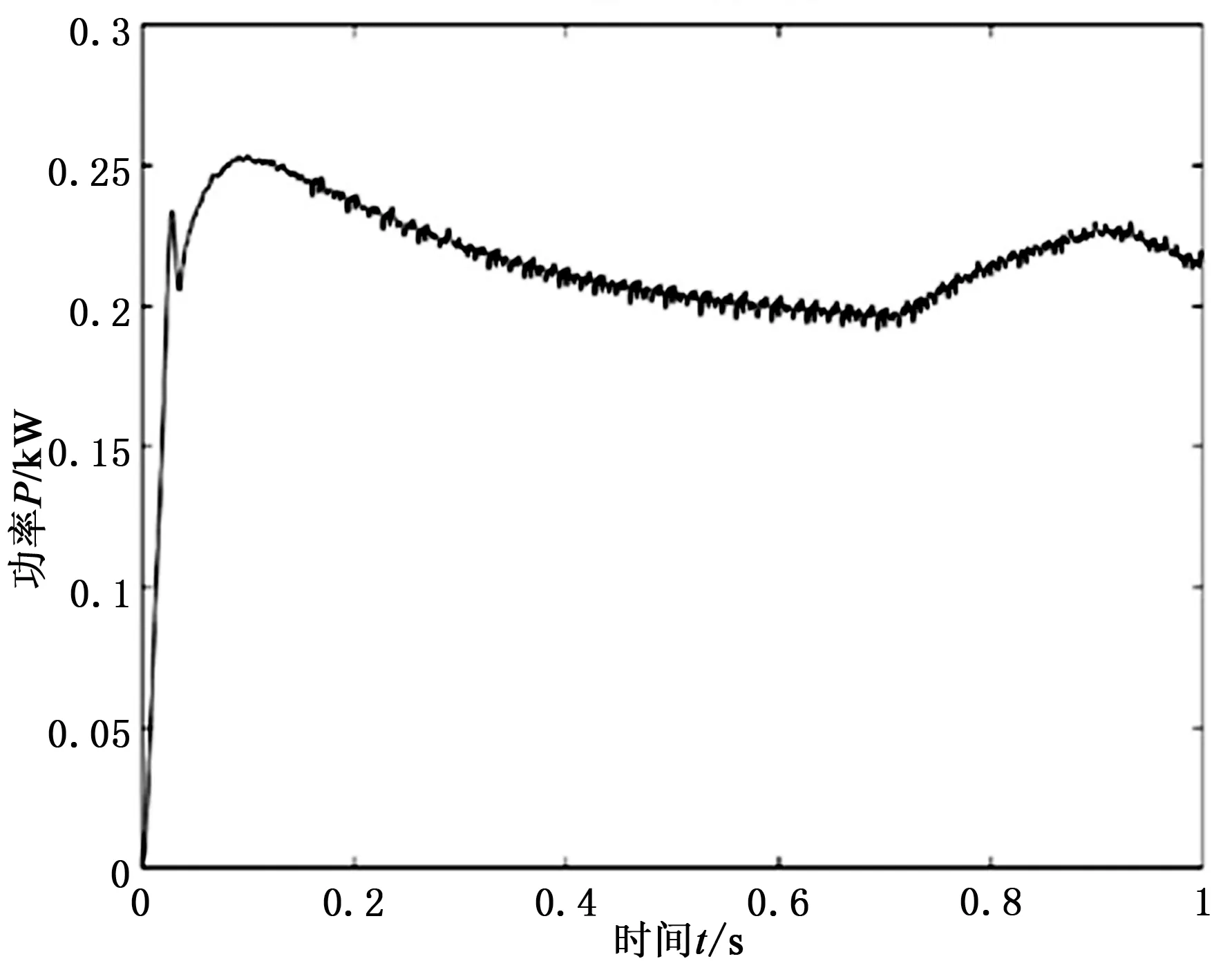
圖3 WTG功率變化曲線Fig.3 WTGpower changediagram
當風速不斷增大時,風機的輸出功率隨之呈現出先上升后下降的趨勢,兩者之間呈現出非線性關系,可以看出風機的輸出功率在某個轉速值時存在最大值,最大值出現在0.1 s處,此時功率值最大,為0.25 kW。在最大值之前,風機風速與風機輸出功率之間呈正比關系,在最大值之后,呈負相關。
3 基于微源輸出功率的微電網自適應電流保護
3.1 自適應電流整定方法
自適應電流保護的原理是根據系統目前的運行狀況、故障類型以及故障時的短路電流作為保護整定的依據。其和傳統保護不同,自適應保護在任何情況下都可以正確動作。

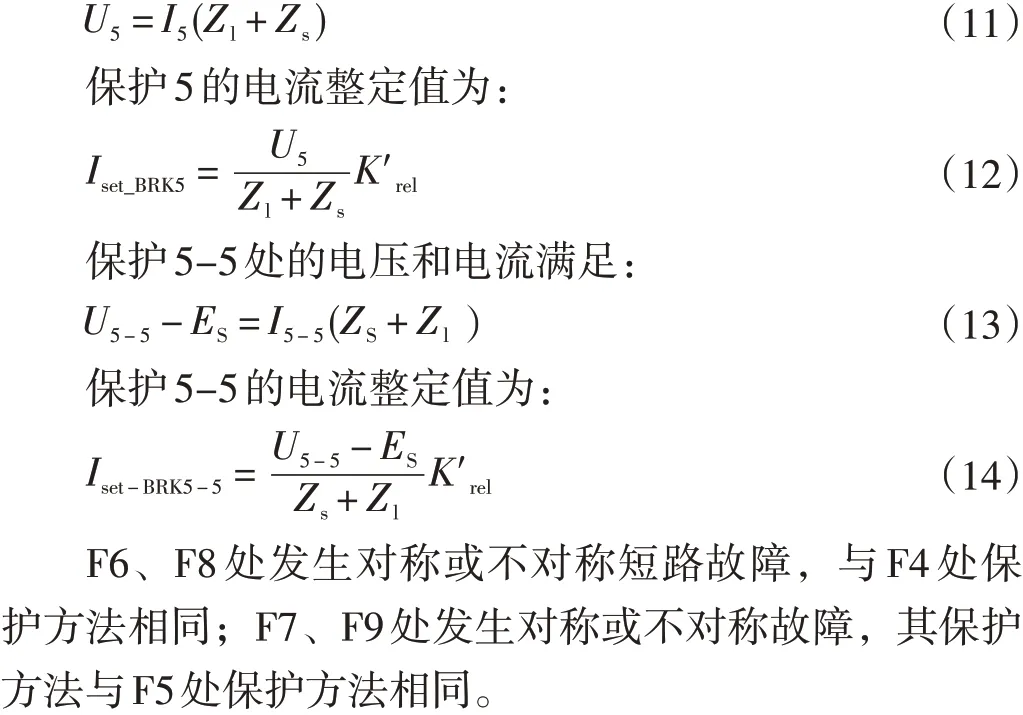
若DE段F5處發生故障,則有保護5和保護5-5共同作用保護微網和配網。由于F5在風電微源附近,所以在發生故障時,保護5-5要快速準確的隔離故障區,避免故障擴大,影響風電微源。保護5處的電壓和電流滿足:
3.2 基于微源輸出功率的微電網自適應電流保護的實現
根據上述對各微源輸出功率特性的分析以及對整定電流值的計算,可以根據實時測定的各微源輸出功率算出各微源為故障處貢獻的故障電流IDG,f,即:

將If作為電流整定啟動保護判據。其中圖4中的α取0~10%中的任意值,具體情況視具體問題而定。進一步判斷是否發生故障,判斷此時功率方向是否為正,是否與上游功率方向或下游功率方向相同,以此來判斷故障區域。若為故障區域,此處的保護裝置應立馬跳閘斷開,避免干擾非故障區域的運行。
實際微網中,微源輸出功率時刻在發生變化,對電流的整定處在動態變化中。圖4所示為依據上述微源輸出功率的變化及對電流的整定而設計的保護整定判斷流程。
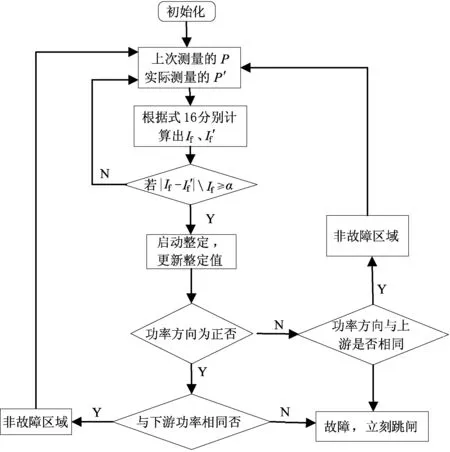
圖4 保護整定判斷流程Fig.4 Protection settingjudgment process
4 算例仿真
4.1 仿真系統的結構
系統電壓為10.5 kV,連接到配電網端為10 kV,系統最大運行方式下的電源電阻為Rmin=0.105Ω,電源感抗為Lmin=0.001 96 H;最小運行方式下的電源電阻為Rmax=0.418Ω,電源感抗為Lmax=0.007 52 H。AB、AD、BC、DE、AF、AG段均為3 km架空線路。系統參數如表1所示。

表1 交流微電網系統參數Tab.1 The ACmicrogrid systemparameters
4.2 案例仿真
在PSCAD/EMTDC中建立如圖1所示的微電網仿真模型,采用基于微源輸出功率的自適應電流保護方法,設置故障發生位置、類型、持續時間,仿真結果如表2所示。
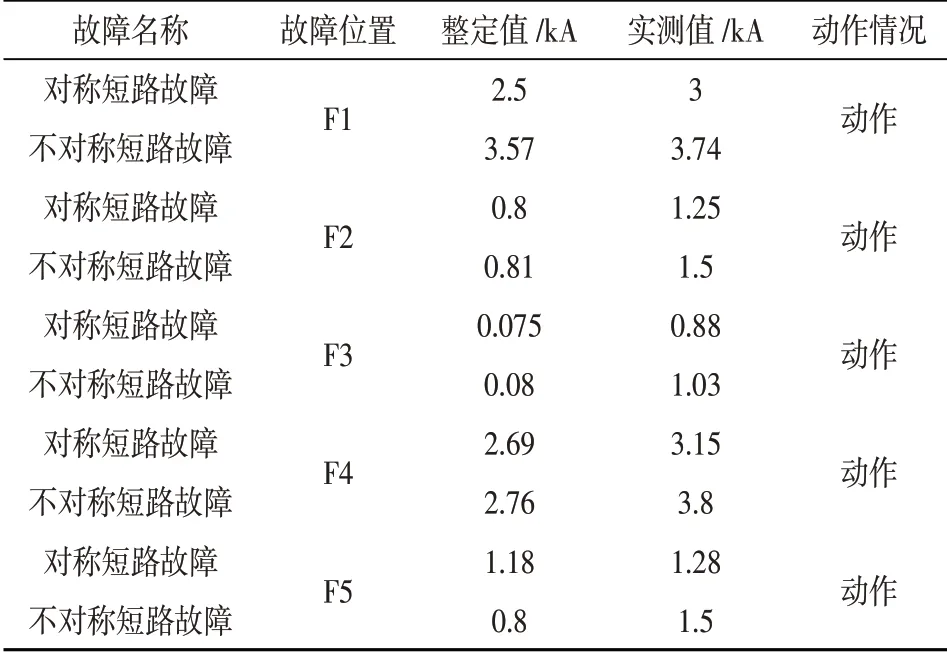
表2 各線路保護整定值與測量值Tab.2 Thesettingand measurement valuesof each lineprotection
由表可得,在任一饋線上發生對稱短路故障或不對稱短路故障,保護裝置都可以立即動作,斷路器跳閘,隔離故障區域,以保護非故障區域安全穩定運行。
若F2發生不對稱故障時,有DSTU2和DSTU2_2共同跳閘,因為F2處由雙電源供電。保護仿真圖如圖5~6所示。故障在饋線的50%處,故障于0.8 s開始,持續0.2 s。
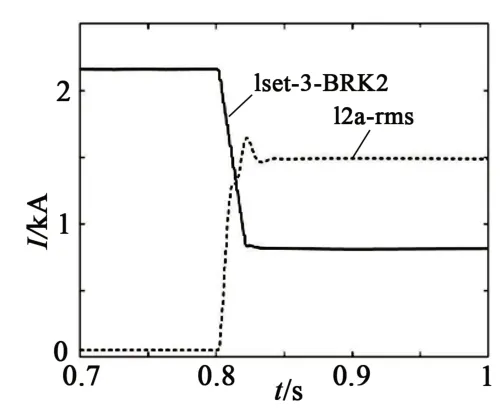
圖5 保護2動作Fig.5 Theprotection 2 action
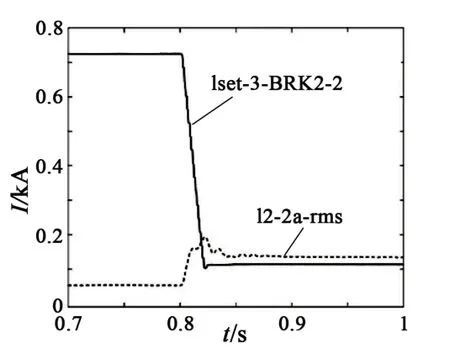
圖6 保護2_2動作Fig.6 The protect 2_2 action
當F2發生不對稱短路故障時,DSTU2動作,切斷主網為故障點的供電,不影響其他區域的供電可靠性。當微源的輸出功率發生變化時,立即啟動整定判據,當有故障發生時,根據當時的電壓和線路阻抗,可以立即整定電流,當故障電流超過整定電流時,斷路器立即跳閘,以保護微網的安全穩定運行。
當F2發生不對稱短路故障時,DSTU2_2也會動作,切斷交流微源對故障點的供電。
當F5處發生不對稱短路故障時,有DSTU5和DSTU5_5共同跳閘,因為F5處由雙電源供電。保護仿真圖如圖7~8所示。
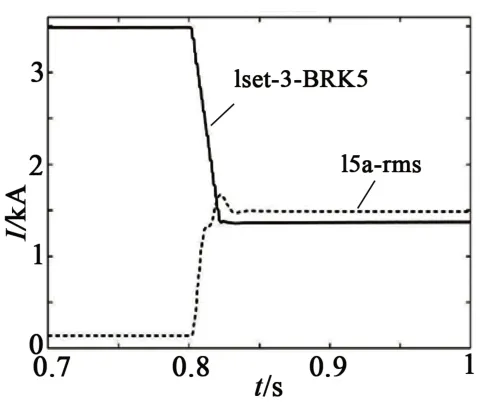
圖7 保護5動作Fig.7 Theprotection 5 action

圖8 保護5_5動作Fig.8 Theprotection 5_5 action
當風力發電微源輸出功率發生變化時,啟動保護整定值整定,當判斷發生故障時,DSTU5_5用來保護風力發電微源,當風力發電微源或饋線DE段上某處發生故障時,DSTU5_5啟動保護,斷開風電微源與故障處的連接。
表3是F2處與F5處發生對稱短路故障和不對稱短路故障時,各保護裝置的動作情況。由表可以看出,在微源附近發生對稱短路故障和不對稱短路故障時,文中所提出的保護方案都可以可靠、準確的切斷故障,斷開故障區域,使非故障區域正常運行,從而保護整個微網及配網。

表3 F2、F5處故障時各保護裝置的動作情況Tab.3 Theoperation of protection devicesat fault of F2 and F5
5 結束語
本文在分析了微網的拓撲結構、故障特性及各微源的輸出功率特性后,提出了一種基于微源輸出功率的微電網自適應電流保護方案。該方法不依賴復雜的通信系統,可以有效地保護微網;可有效應對微網中各微源的輸出功率時刻變化、微網運行模式變化、故障類型影響的情況,方法簡單、有效地保護了微網。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
