
傳統航測結合傾斜攝影測量在大比例尺鐵路帶狀地形圖中的應用
2021-11-24 12:57:59羅芬劉明
中國房地產業·中旬 2021年9期
羅芬劉明
【摘要】針對鐵路帶狀大比例尺測圖的要求,本文討論如何利用傳統航測與傾斜攝影測量技術相結合的方式獲取高分辨率影像、三維傾斜模型構建以及完成高精度地形圖的生產。首先根據測區情況分析采取何種技術方法,像控點布設方案、航線規劃設計、空中三角測量要點分析、數字化地形圖數據采集效率提升分析;根據野外實地打檢查點與內業采集完成的數字化地形圖進行精度比對,精度比對表明采用該技術不僅滿足1:1000大比例尺帶狀地形圖的生產,為山區、丘陵地區數字化帶狀地形圖生產提供技術支撐。
【關鍵詞】傳統航測;傾斜攝影測量;三維傾斜模型;空中三角測量;數字化地形圖
【DOI】10.12334/j.issn.1002-8536.2021. 26.093
1、概述
根據國家發展改革委員會、交通運輸部、國家鐵路局、中國鐵路總公司聯合發布《鐵路“十三五”發展規劃》的總體部署,全國鐵路將分步推進和基本完成客車徑路普速線路安保區劃定任務目標。計劃開展線路用地圖測繪和安全保護區平面圖繪制工作。鑒于鐵路運營線處于全線封閉狀態,列車運行速度快,且鐵路全線有山區、丘陵、城鎮等復雜地形,若采用全野外人工實測地形圖;第一,存在很大的安全隱患。第二,施測困難,作業周期長。為了避免出現生產安全事故,同時提高生產效率,本項目特采用無人機低空攝影測量的方式進行作業;其中,全線路原測上采用無人機航空攝影方式取締傳統的測量作業方式,在無人機無法兼顧的區域(限飛區和禁飛區)采用傳統的常規地形測量作業方式。
2、項目區概況
項目區位于廣東省境內,整個區域跨越龍川縣、梅州市,全路段為客貨共線鐵路,采用標準間距的有砟軌道和有縫鋼軌鋪設,尚未實現電氣化。線路示意圖如圖1。
3、實施方案
3.1 無人機航空攝影
根據項目區的地形地貌、近期天氣情況,向所管轄的民航管理部門申請航空攝影空域。同時根據成果要求進行野外探勘并進項技術設計。本項目場站及村莊地區采用多旋五鏡頭傾斜攝影測量方法、場站外無人煙區域采用固定翼行傳統航測的方法。
3.1.1實地踏勘
獲取測區范圍后,需進行實地踏勘,了解測區概況及地形地貌,尋找合適的起飛場地以便規劃航線時有效規避場地周邊較高的地物,確保航飛安全。
3.1.2像控點預布設
基于GoogleEarth衛星影像,其中1:500比例尺的場站附近以150-200m間距,1:1000比例尺的鐵路線路以500-1000m間距,在測區范圍內的合適位置預先布設像控點,且像控點按“S”型方式布設。在施測過程中可根據實際情況適當調整點位。
3.1.3像控點量測
根據相控預選點進行實地測量,若實地水泥硬化的地方,則選擇噴漆的方式制作地面標識,如實地沒有硬化地表的地方則選擇利用標靶的形式制作地面標識。
3.1.4分區及航線設計
根據任務區地形地貌進行分區,測區屬于帶狀測區,分區原則主要根據地形高差、線路拐彎大小進行分區。由于測區全線有山川、河流、村莊、城鎮、場站等,本次主要采取分區塊、和分區段兩種方式進行分區。場站主要采取區塊的形式分區進行傾斜攝影,鐵路路線主要采用區段的形式分區進行正射攝影,航線飛行方向選擇東西方向飛行,部分區域也采用了南北方向飛行。本次飛行正射航向重疊度為70%,旁向重疊度為60%;傾斜攝影航向重疊度為80%,旁向重疊度為80%。
3.1.5影像數據檢查及預處理
(1)正射地面分辨率優于8cm,傾斜攝影地面分辨率為1.5cm
(2)通過目視觀察,確保影像質量影像清晰,反差適中,顏色飽和,色彩鮮明,色調一致。有較豐富的層次、能辨別與地面分辨率相適應的細小地物影像,滿足數據生產要求。
(3)由于不同的飛行天氣和不同飛行時段等原因,則會引起不同飛行架次之間的影像曝光度不均勻,明亮度不均勻等,在進行空中三角測量前應對照片進行飽和度及亮度調整。
3.1.6解析空中三角測量
空中三角測量是利用航攝相片與所攝目標之間的空間幾何關系,利用共線方程根據少量相片控制點計算待求點的平面位置、高程和相片外方位元素,通過已知相片控制點推算未知點進行網平差如公式1,完成空間位置坐標系的傳遞任務。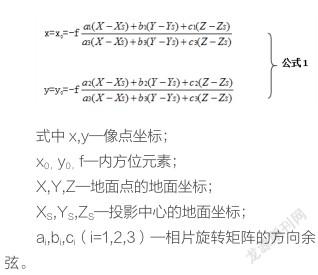
本次飛行設備自帶ppk動態后處理系統,通過ppk解算的POS數據可大大提高空三加密精度。
(1)資料準備
a.航攝資料:原始照片影像,ppk動態后處理解算的POS數據,相機參數;
b.其他資料:像控點測量數據,已知像控點照片。
(2)空三加密
對于面積較大、照片數量較多的區域,需根據實際情況劃分子區,對每個子區進行空三加密,然后需對各個相鄰分區進行接邊檢查,調整誤差較大的連接點,重復接邊檢查和連接點調整操作,直至接邊誤差滿足精度要求,最后檢查空三加密成果是否符合要求。
3.1.7傾斜三維模型、立體相對構建
本項目采用Context Capture Master軟件構建場站的三維模型,Pix4D構建鐵路線路的立體像對和正射影像。傾斜三維模型構建流程如圖2,立體相對構建流程如圖3。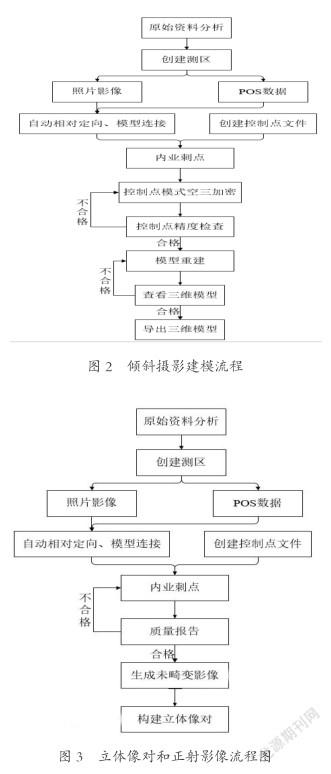
3.2 數字化地形圖測繪
3.2.1立體采集
(1)場站部分:利用傾斜攝影測量方法測制1:500地形圖,按照1:500的地形圖采集技術規范,采集鐵路要素及附屬設施、房屋、水系、地形地貌等要素如圖4。
(2)場站外其他線路部分:通過Pix4d軟件構建鐵路線路空三加密,空三加密生成立體測圖工程進行立體采集,按照1:1000的地形圖采集技術規范,采集鐵路設施要素、房屋、水系要素、地形地貌等要素如圖5。
3.2.2外業調繪
內業定位外業定性,針對立體相對采集的圖形打印圖紙進行野外調繪。外業調繪主要調繪的內容包括房屋結構、層數,陽臺、飄樓及房檐情況;百米標、公里樁、曲線碑位置和屬性,信號燈屬性,隧道口名稱,管線(電力線和通訊線)連線,植被信息,溝渠流向和道路的鋪設材料。
3.2.3地圖編輯整飾
(1)為保證地形圖各要素的清晰,各符號間的距離不應小于0.2mm。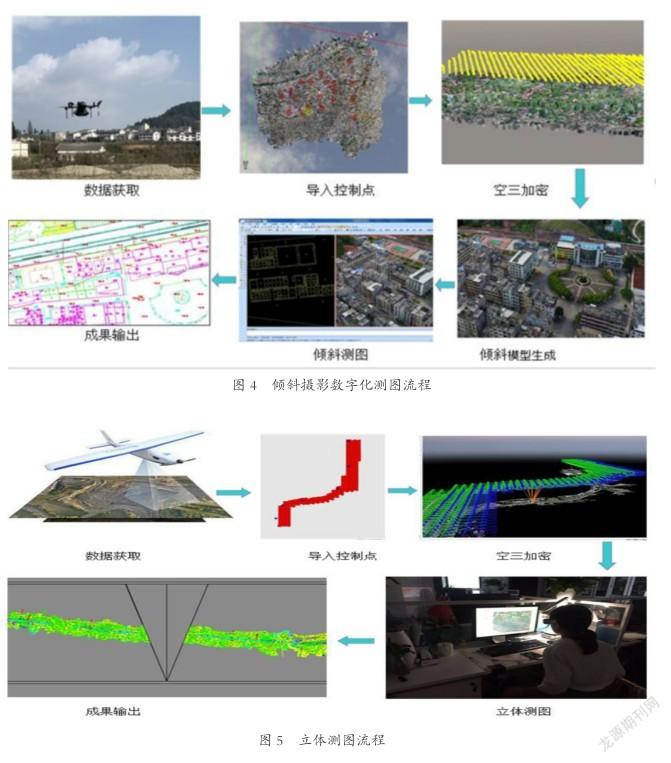
(2)道路虛實邊線遵循陽光陰影法則。
(3)建筑區內電力線、通訊線不連線,只在桿架處繪出連線方向,郊外采用連線表示。
(4)雙線道路與房屋、圍墻邊線重合時,可以建筑物邊線代替路邊線。
(5)水涯線與陡坎重合時,可用陡坎邊線代替水涯線。
(6)圖幅接邊時,地物平面位置及等高線接邊較差一般不得大于地形圖基本精度規定的相對中誤差的2倍。
3.2.4鐵路數字化地形圖分幅與編號
(1)數字化地圖分為車站用地圖、區間用地圖。
(2)車站、區間用地圖應分線名、按線路里程增長方向分幅,并以此順序編號;
(3)車站根據車站進出站信號燈位置單獨分幅,車站用地圖一般每個車站為一幅圖。
(4)區間用地圖圖幅寬度采用841mm,按照4-5km長度分幅。
3.2.5圖幅接邊
圖幅接邊原則:相鄰圖幅采取西北接邊。相鄰圖幅接邊應采用“捕捉”方式,進行圖廓線上端點的精度連接。線要素以及面要素既要進行圖形、幾何位置、屬性接邊。
3.2.6禁飛區以及內業無法判別地物補測
(1)針對禁飛區域采用了傳統測量的作業方式進行地形圖測繪。
(2)由于項目實施為夏季,植被茂盛,需對內業采集時辨別不清標記為“A”的地物進行外業補測。
(3)禁飛區域采取全野外實測。
4、精度檢查結果
地物點平面精度檢查:
在實地圖根點位置,對有條件設站區域內的房角、圍墻點設站采集數據。共檢測點位2247個,將這些點位的數據與電腦中提取的圖面對應點位數據進行比較,根據高精度檢測中誤差公式M=計算出平面點位中誤差為±4.6cm。
5、主要技術問題和處理方法
5.1 帶狀航線規劃
航線規劃主要有測區和測段兩種方式形式,針對鐵路存在諸多拐角的帶狀地形,采用測段模式顯然更為合理,但地面站軟件規劃航線時測段模式是在測區的模式下對航線進行精簡,雖減少了非必要航線的產生,節省了飛行時間,提高了作業效率,但也導致了無人機拍照時姿態不穩定的情況,影響照片質量甚至后期數據建模。
解決方案:為保證無人機拍照時處于較為平穩的狀態,在軟件自動生成的航線基礎上,在轉彎過急、過大的區域添加必要的非拍照航路點、設置預轉彎,方便調整無人機的進場方向和姿態,保證照片質量。
5.2 鐵路設施要素調查
鐵路線路上存在百米標、公里樁等多種標識,在:11000的影像中呈現為大小類似的小白點,內業體力采集時無法區分各種標識的相關屬性。鐵路設施要素位于運營線內,時有火車通過,車速較快,采用實地調繪的方式不僅會危害火車的運營安全,還會給自身的人生安全帶來危險。
解決方案
(1)無人區域
為保障作業員的人生安全,采用作業員乘坐火車,手持高像素的手機錄制視頻的方式獲取鐵路線路的真實情況,利用各種標識周邊地物判斷標識的大致位置,內業采集人員通過比對正射影像和三維模型與視頻中地物的相似程度,選取相似程度最高的位置作為各種不同類型的鐵路設施要素,從而確定各種鐵路設施要素的位置及相關屬性。
(2)場站和有村莊的路段
采用按原比例尺放大1.5倍打印圖紙進行野外實地調繪,根據外業調繪圖紙與正射影像和三維模型比對確定公里標和百米標位置。
結語:
本文主要介紹了傳統航測技術結合傾斜攝影測量技術在鐵路帶狀地形圖生產中的具體流程,針對場站和村莊區域采用傾斜攝影測量的技術方法生產數字化地形圖,場站、村莊外的無人區域采用正射的方法生產數字化地形圖。通過兩種不同的技術方法的相結合,以及對項目區地形圖成果精度檢查分析,發現采用兩種方法相結合在不同比例尺中的成圖精度均滿足要求,體現了不同區域利用不同技術方法不僅滿足相應的精度要求,并且大大的提高效率,為長距離跨越丘陵、山區線狀工程基礎資料的獲取、數字化鐵路的建設提供技術支撐。
參考文獻:
[1]何宗宜,宋鷹,李連營.地圖學[D].武漢大學出版社,2016.
[2]高強.淺談傾斜攝影測量數據的關鍵處理技術[J].世界有色金屬,2019(24):239-240.
[3]何敏,熊先才,李曉俊,趙龍.傾斜攝影技術在丘陵山區大比例尺測圖中的應用[J].測繪通報,2021(2):93-97+107.
[4]張可可.無人機影像空中三角測量實驗研究[J].測繪,2013,36(1):10-12.
[5]戴金榮.無人機傾斜攝影測量在1:500地形圖測繪中的應用[J].經緯天地。2020(04):30-34.
[6]羅天銀,張平,黃青倫.傾斜攝影空三結果優化及檢查研究[J].測繪,2017,40(01):22-24+28.
[7]顏閔.無人機傾斜攝影測量在1:500大比例尺測圖中的實踐[J].住宅與房地產,2018(27): 257-257.
[8]莫寅,基于無人機傾斜攝影測量的大比例尺地形圖測繪方法[J].北京測繪,2020,34(01): 79-82.
