天基平臺寬譜段成像光學系統設計
2021-11-25 08:13:56李軼庭王靈杰張玉慧劉銘鑫
中國光學 2021年6期
關鍵詞:系統
李軼庭,王靈杰,張玉慧,劉銘鑫
(1.長春理工大學 光電測控與光信息傳輸技術教育部重點實驗室,吉林 長春 130022;2.中國科學院 長春光學精密機械與物理研究所 中國科學院光學系統先進制造技術重點實驗室,吉林 長春 130033)
1 引言
地球靜止軌道衛星成像光譜儀在氣象觀測、資源調查、環境監測等領域具有重大的應用價值。而覆蓋可見光到長波紅外的光譜儀器具有晝夜觀測的技術優勢[1]。地球靜止軌道凝視型面陣成像光譜儀對其時間分辨率、空間分辨率和成像幅寬、遙感成像動態范圍提出了更高的要求,以期獲得更加豐富的目標層次及細節信息,以便對探測目標信息進行有效地獲取及識別,由于衛星資源有限,大數據量會產生存儲、傳輸及處理的困難。壓縮感知技術以其先壓縮再采樣的特點,在現有信號傳輸水平下可以有效提高獲取圖像的效率,降低數據采集的壓力。在此背景下,利用地球靜止軌道平臺可以長期駐留固定區域上空的特點[2-5],結合壓縮感知光譜成像技術,對寬譜段成像光學系統進行分析,并對其光學系統進行設計。
2 壓縮感知光譜成像技術
將壓縮感知理論應用于光譜成像技術中,可以實現對光譜圖像信息的壓縮采集,解決了衛星數據存儲、傳輸、處理的問題,其原理如圖1所示。待測光經過物鏡成像于離散編碼模板上,離散編碼模板將得到的二維信息調制準直后,由色散元件色散為光譜帶,會聚后,探測器獲取經過壓縮后的二維離散光譜混疊信息,通過優化解混后即可高概率獲得原始光譜信息,壓縮感知成像光譜技術獲得的采樣數據量遠小于傳統成像光譜技術的數據量,可將將衛星信號數據量降低兩個數量級[6-8]。
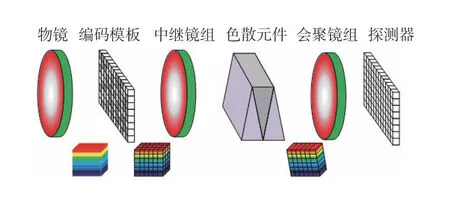
圖1 壓縮感知光譜成像系統原理圖Fig.1 Schematic diagram of compressive sensing spectral imaging system
根據此模型提出本文的光學系統結構形式,根據光學系統全譜段的要求,需將系統分為可見光、中波紅外、長波紅外3個譜段光路分別進行設計[7],采用分色片分譜段,選擇DMD作為離散編碼模板,可見光所選DMD像元大小為7.6 μm,采用一個DMD像元與4個探測器像元大小進行匹配,中波紅外光路所選DMD大小為7.6 μm,采用一個DMD像元與一個探測器像元大小匹配,長波紅外光路所選DMD像元大小為10.8 μm,采用一個DMD像元與1個探測器像元大小進行匹配,DMD的開合角度為±12°,通過中繼鏡組的放大倍率匹配編碼模板與探測器像元面積的不同。目前常用DMD的像元數受芯片工藝限制,無法與探測器實現完美的匹配,當探測器分辨率高于編碼DMD的分辨率時,可通過對DMD像元進行灰度分級的辦法,保證分級后的編碼像元與探測器像元一一對應,即可保證系統的整體分辨率。由于DMD帶來的額外像差可由像面傾斜進行補償,基于DMD的目標模擬器應用于長波紅外波段時,照明光束需要選取合適的入射角以減少DMD的衍射效應對系統成像對比度造成的影響[9-11]。整體光學系統的模型如圖2(彩圖見期刊電子版)所示,其由物鏡、分光片、一次成像系統、準直系統、色散元件、DMD,以及光譜信息采集處理系統7部分組成,待測光經過物鏡入射到分光系統進行波段選擇,經成像系統成像于編碼模板上,由準直系統準直為平行光,在色散元件表面色散為光譜帶,經會聚系統會聚在探測器上。光學系統覆蓋可見光、中波紅外、長波紅外,譜段較寬。根據壓縮感知成像光譜系統模型,需對系統進行模塊化設計、可降低整體設計的難度,在保證各模塊的成像質量后,將各模塊整合最終對整體進行設計[12-20]。
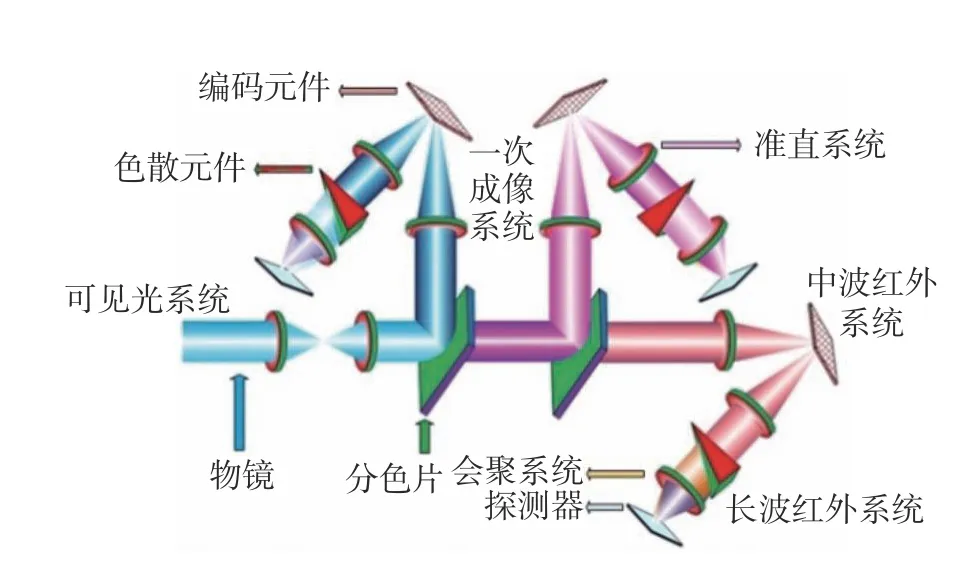
圖2 基于壓縮感知的大口徑多譜段光譜儀物理模型Fig.2 Physical model of visual and infrared large aperture multispectral sensor based on compressive sensing
3 光學系統參數計算
本文光學系統包括3個譜段,各譜段設計要求如表1所示。
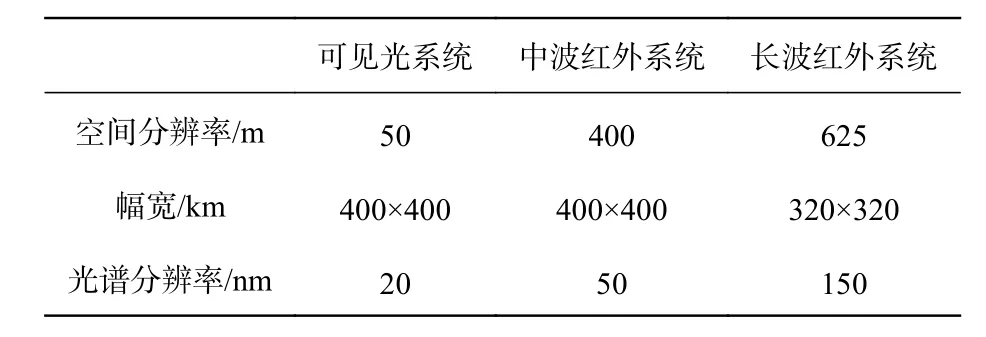
表1 光學系統設計要求Tab.1 Requirements for optical system design
根據空間分辨率以及幅寬的要求,所選探測器參數如表2所示。
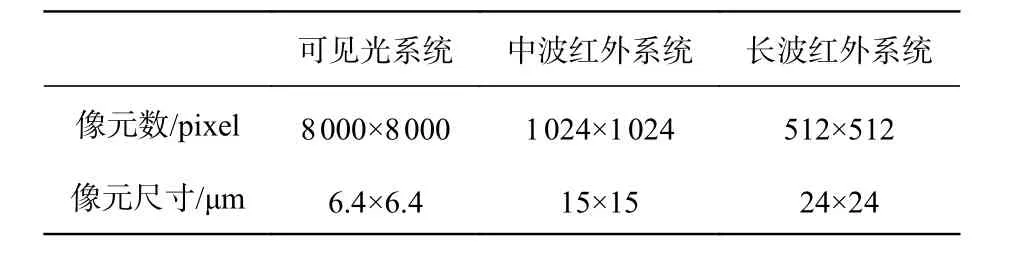
表2 光學系統探測器參數Tab.2 Parameters of the optical system’s detector
根據式(1)對系統、焦距及視場角進行計算,

其中H為衛星的軌道高度,B為相機的幅寬,L為像面的長度,a為像元尺寸,ω為半視場角,f為系統焦距。
相機鏡頭孔徑D的大小影響相機的分辨率、調制傳遞函數(MTF)、曝光量、信噪比和相機尺寸。D的確定需考慮探測器的信噪比、噪聲等效溫差、噪聲等效反射率差的要求。綜合考慮后,光學系統孔徑設定為700 mm,見表3。
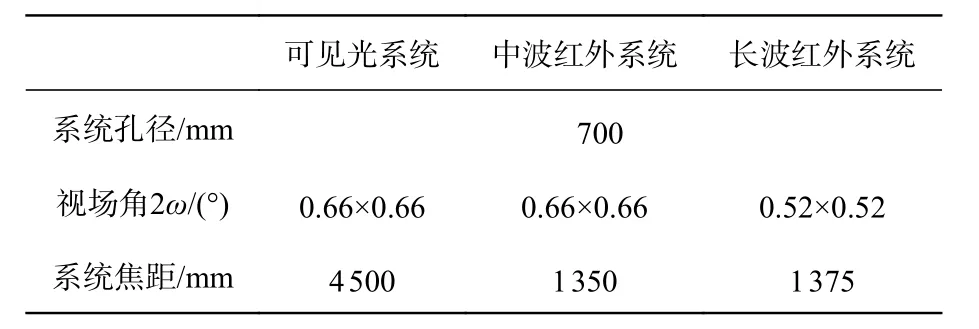
表3 光學系統最終設計參數Tab.3 Parameters of the designed optical system
物鏡設計為同軸反射無焦系統,可以實現無色差設計以及衛星長時間凝視成像的軌道的震動補償,其放大倍率為5×,要求系統遮攔比小于1/3。同時根據DMD像元大小與探測器像元大小計算不同光路準直光路的焦距,準直光路焦距與會聚光路焦距保持一致。選擇光柵作為系統的色散元件,光柵的刻痕數直接決定系統的光譜分辨率。根據式(2)、式(3)與各譜段會聚光路焦距計算光柵刻線數,如表4所示。
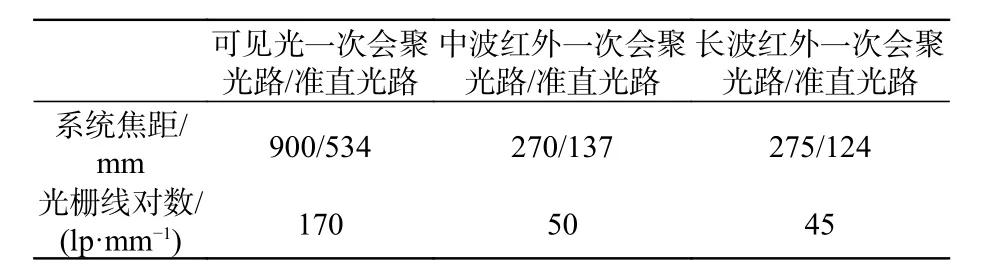
表4 子系統參數Tab.4 Parameters of the sub-optical system
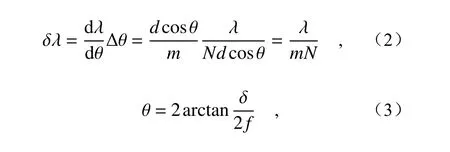
其中δ 為像元大小,δ λ為系統的光譜分辨率。
設計結果要求一次會聚系統、準直系統、會聚系統各部分像質良好,對于高分辨率的成像光譜儀系統,二級光譜的存在將嚴重影響最終的成像質量,二級光譜的色差大小與系統焦距成正比,因此對于長焦距的可見光路系統,需對其二級光譜進行優化及評價。由于系統空間維很大,必然存在譜線彎曲和色畸變,譜線彎曲是指不同波長彎曲圖像與直線的偏離程度,色畸變是由光譜成像系統對不同波長的像放大率不同造成的,嚴重時,會影響成像質量,譜線彎曲過大還會降低系統的空間分辨率,為獲得準確的多光譜圖像,譜線彎曲以及色畸變需控制在1/2個像元以內。在中波、長波光路中選擇制冷型紅外探測器,因此需對冷光闌進行匹配。
4 設計過程、結果與分析
基于上述參數分別對3個譜段進行光學系統設計,其整體結構如圖3所示。
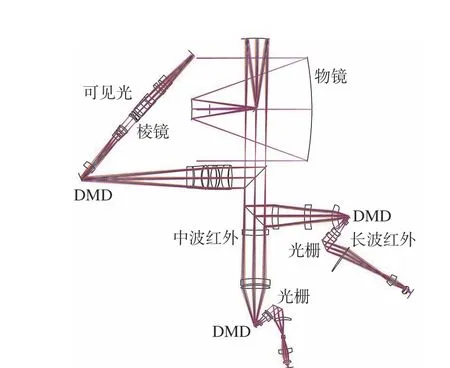
圖3 光學系統結構圖Fig.3 Structure of the optical system
物鏡選擇以卡塞格林為基礎的同軸三反無焦系統,在二鏡、三鏡中加入反射鏡以折轉光路,使系統緊湊,同時在主鏡與三鏡中引入高階非球面在保證系統放大率和遮攔比的情況下,像質達到最佳。其放大倍率為5×,遮攔比為0.185。
對可見光、中波紅外、長波紅外系統整體要求結構緊湊,對各光路不同系統進行模塊化設計[15-20],可以降低系統的設計難度。
可見光路優化中,約束一次會聚光路、準直光路、會聚光路焦距分別為900、534、534 mm,約束各鏡片厚度以及系統整體長度,對于長焦距系統,對二級光譜的優化選擇阿貝數相差較大、部分色散相同或相近的玻璃對其進行優化。采用棱鏡-光柵結構作為可見光路的分光元件,補償系統的譜線彎曲,通過真實光線的追跡控制系統的色畸變大小,利用像面傾斜的方式校正軸向色差并達到平譜面的目的,在對各模塊優化后,對整體結構進行優化,優化結果可見光會聚光路在波長分別為500、700、900 nm時,各視場MTF在78.125 lp/mm處分別高于0.674、0.562、0.455,點列斑83%以上位于艾里斑內,彌散斑半徑最大分別為5.231、4.694、4.113 μm,小于一個探測器像元尺寸。在不同視場下光譜變化下20 nm可以清晰分辨,滿足20 nm的光譜分辨率,其中不同顏色光斑分別代表900、880、720、700、520、500 nm波長在光學系統的點列圖大小,可以看出光學系統在各視場均滿足20nm的光譜分辨率,可見光系統的二級光譜小于0.05mm,譜線彎曲很小,色畸變最大值為2.753 μm,小于1/2個像元大小,如圖4~圖8(彩圖見期刊電子版)所示。
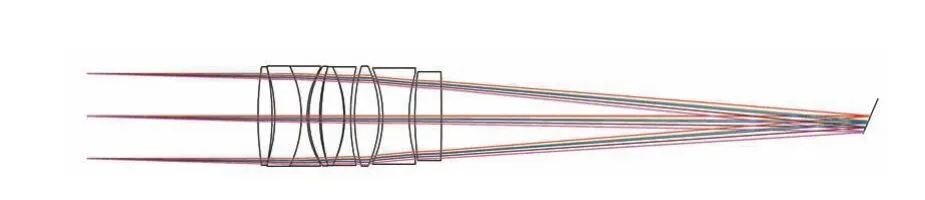
圖4 可見光一次會聚光路Fig.4 First converging lens in visual part
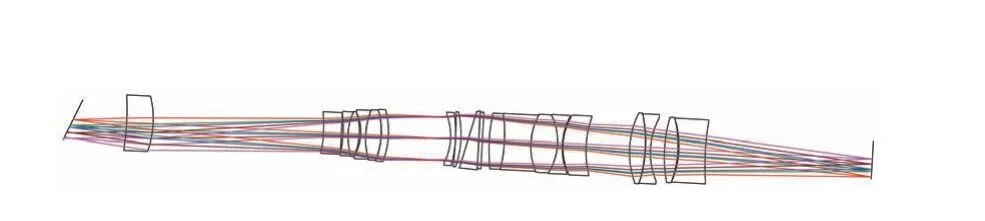
圖5 可見光準直及會聚光路Fig.5 Collimating and converging lens in visual part
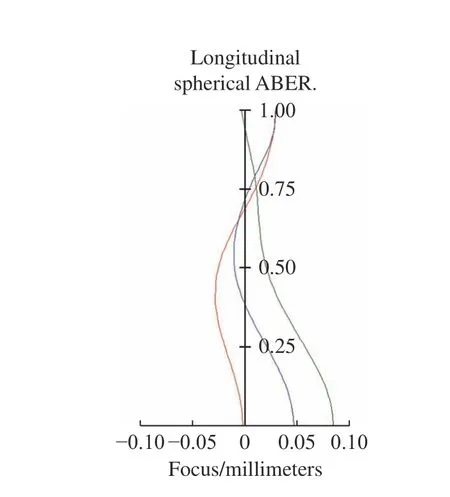
圖8 可見光路二級光譜Fig.8 Secondary spectrum in visual part
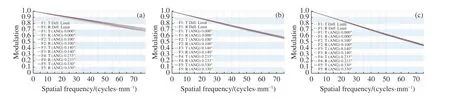
圖6 波長為 (a) 500 nm; (b) 700 nm; (c) 900 nm時的MTF值Fig.6 MTF at (a) 500 nm; (b) 700 nm; (c) 900 nm
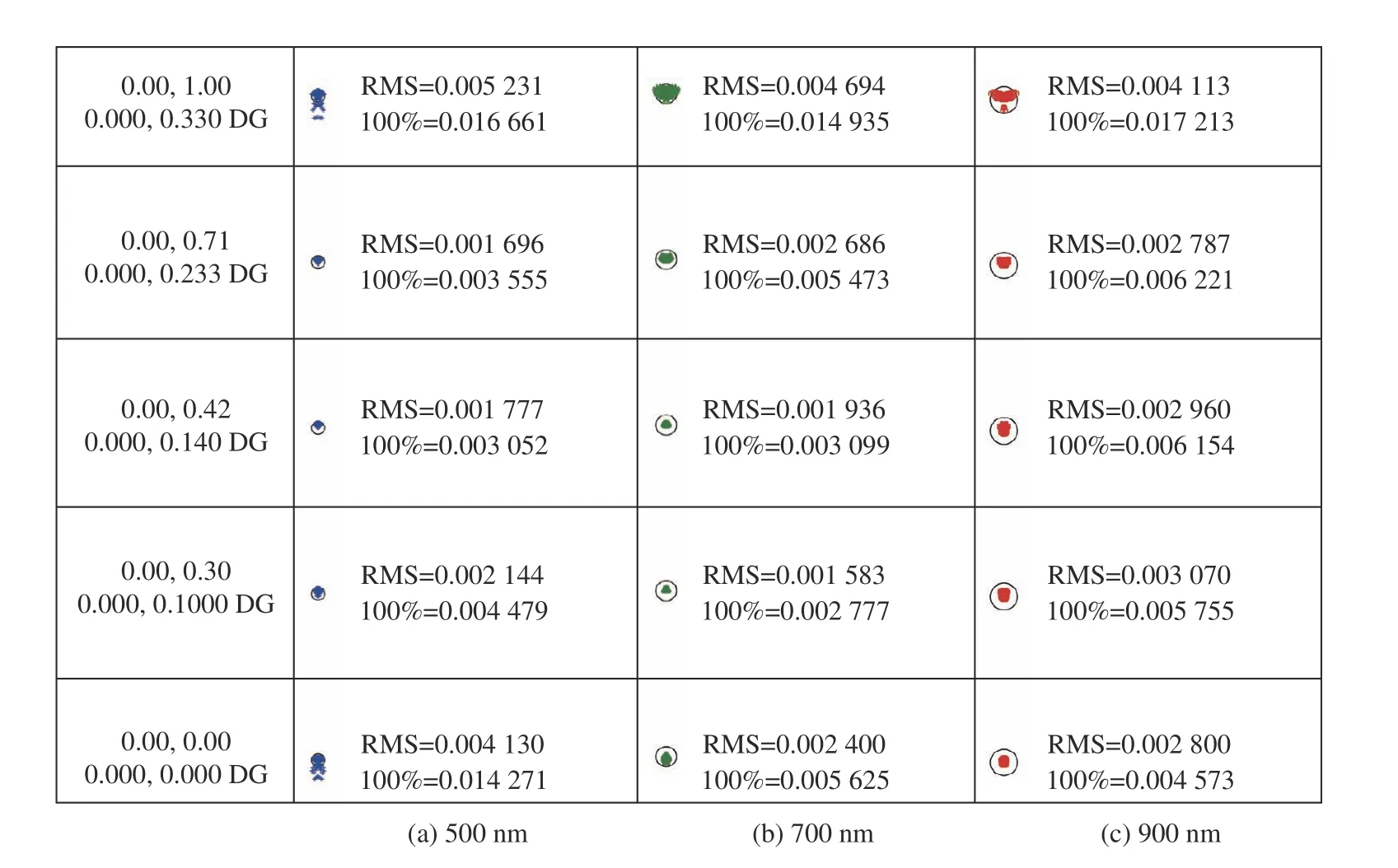
圖7 波長為(a) 500 nm; (b) 700 nm及(c) 900 nm時點列圖Fig.7 Spot diagram at (a) 500 nm; (b) 700 nm and (c) 900 nm
中波紅外的優化中,約束一次會聚光路、準直光路、會聚光路焦距分別為270、137、137 mm,約束各鏡片厚度以及系統整體長度,并對部分表面引入二次曲面以及高階非球面,針對中波紅外系統的譜線彎曲以及色畸變,采用離軸透鏡的方式對其進行補償,先優化得到一次成像未離軸時的光學系統,然后根據系統存在的譜線彎曲量,確定透鏡的離軸量,最后適當改變透鏡的半徑完成譜線彎曲的校正,通過真實光線的追跡控制系統的色畸變大小,采用二次成像的方式對光學系統的冷光闌進行匹配,控制系統的焦距以及各視場的邊緣光線出瞳像高對系統進行優化。優化后各模塊成像質量良好、最終得到的中波紅外光學系統在波長3500 nm、3800 nm、4100 nm處的MTF在33.3 lp/mm時分別高于0.607、0.566、0.518。彌散斑半徑最大分別為5.419、5.922、6.678 μm。在不同視場下光譜變化50 nm時各波長點列圖光斑可以清晰的分辨,其中不同顏色光斑分別代表4100、4050、3800、3750、3550、3500 nm波長光學在光學系統的點列圖大小,可以看出光學系統滿足50 nm的光譜分辨率,譜線彎曲很小,色畸變最大值為5.48 μm,小于1/2個像元,如圖9~圖14(彩圖見期刊電子版)所示。
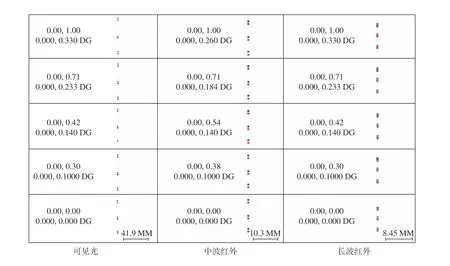
圖9 不同視場下光譜分辨率Fig.9 Spectral resolution in different fields of view

圖11 中波紅外一次會聚光路Fig.11 First converging lens of MWIR part
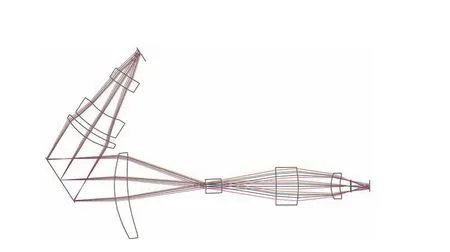
圖12 中波紅外準直及會聚光路Fig.12 Collimating and converging lens of MWIR part
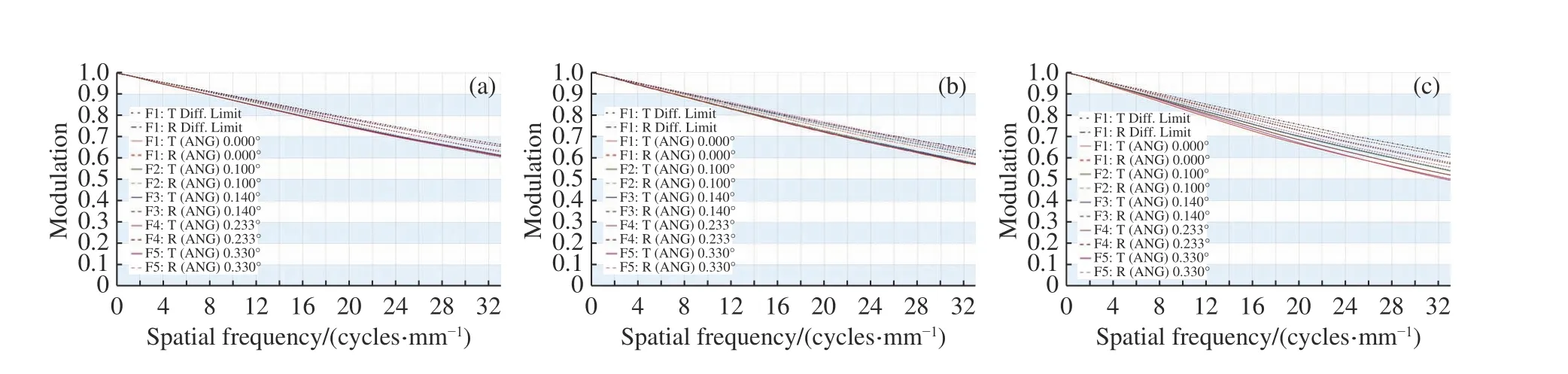
圖13 波長為(a) 3500 nm;(b) 3800 nm及(c) 4100 nm時的MTFFig.13 MTF at (a) 3500 nm; (b) 3800 nm; (c) 4100 nm
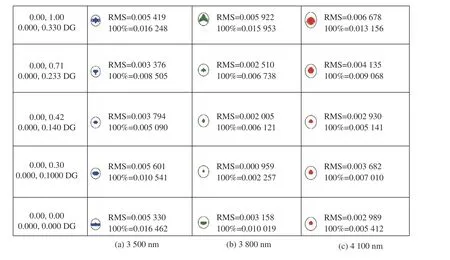
圖14 波長為(a) 3500 nm; (b) 3800 nm;及(c) 4100 nm點列圖Fig.14 Spot diagram at (a) 3500 nm; (b) 3800 nm; (c) 4100 nm
長波紅外的優化中,約束一次會聚光路、準直光路、會聚光路焦距分別為275、126、126 mm,約束各鏡片厚度以及系統整體長度并對部分表面引入二次曲面以及高階非球面,針對長波紅外系統的譜線彎曲以及色畸變,與中波紅外系統相似,采用離軸透鏡的方式對其優化,通過真實光線的追跡控制系統的色畸變的大小,采用二次成像的方式對光學系統的冷光闌進行匹配,約束系統焦距以及各視場光線出瞳像高對系統進行優化。優化后各模塊成像質量良好、最終得到的長波紅外光學系統在波長7700、8600、9500 nm處的MTF在20.8 lp/mm時分別高于0.568、0.536、0.498。彌散斑半徑最大分別為10.16 μm、4.007 μm、9.163 μm。在不同視場下光譜變化150 nm時各波長點列圖光斑可以清晰的分辨,其中不同顏色光斑 分 別 代 表9500、9350、8600、8450、7850、7700nm波長光學在光學系統各視場的點列圖大小,可以看出光學系統滿足150 nm的光譜分辨率,譜線彎曲很小,色畸變最大值為9.35 μm,小于1/2個像元大小,如圖9~圖10、圖15~圖18(彩圖見期刊電子版)所示。
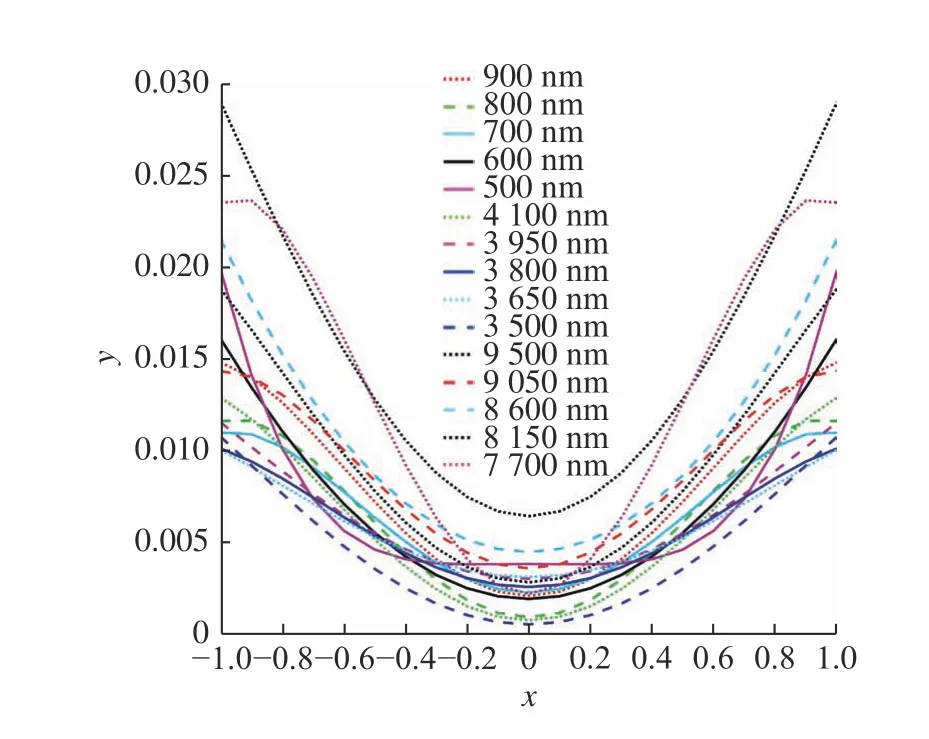
圖10 系統譜線彎曲示意圖Fig.10 Schematic diagram of spectral smile
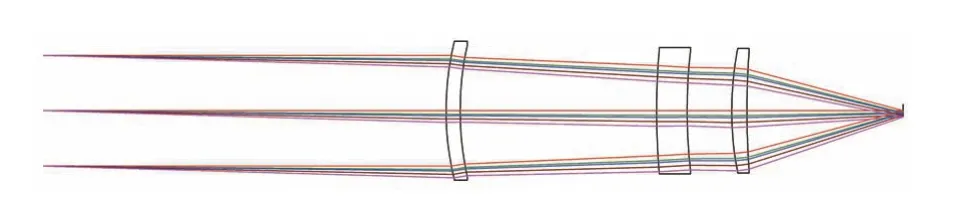
圖15 長波紅外一次會聚光路Fig.15 First converging lens of LWIR part
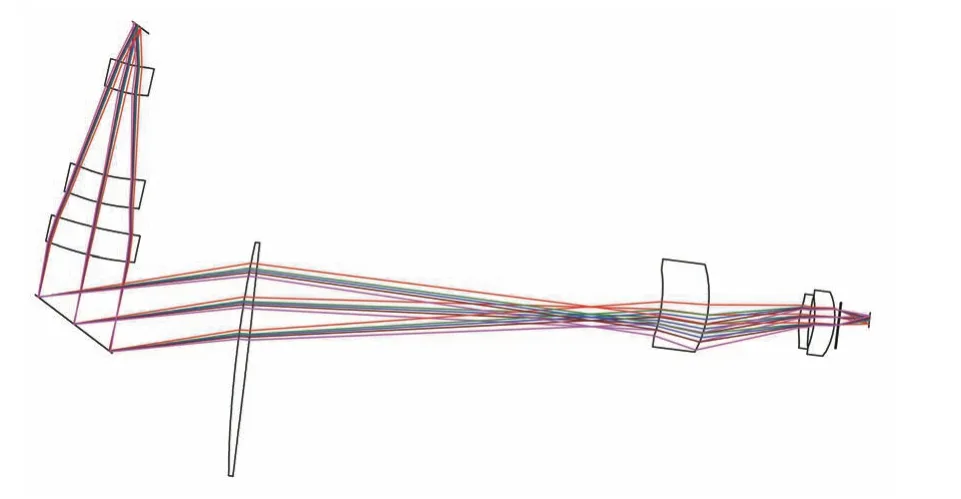
圖16 長波紅外準直及會聚光路Fig.16 Collimating and converging lens of LWIR part
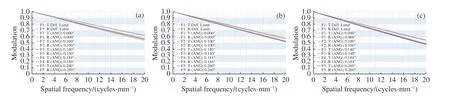
圖17 (a) 7700 nm;(b) 8600 nm; (c) 9500 nm處MTFFig.17 MTF at (a) 7700 nm; (b) 8600 nm; (c) 9500 nm
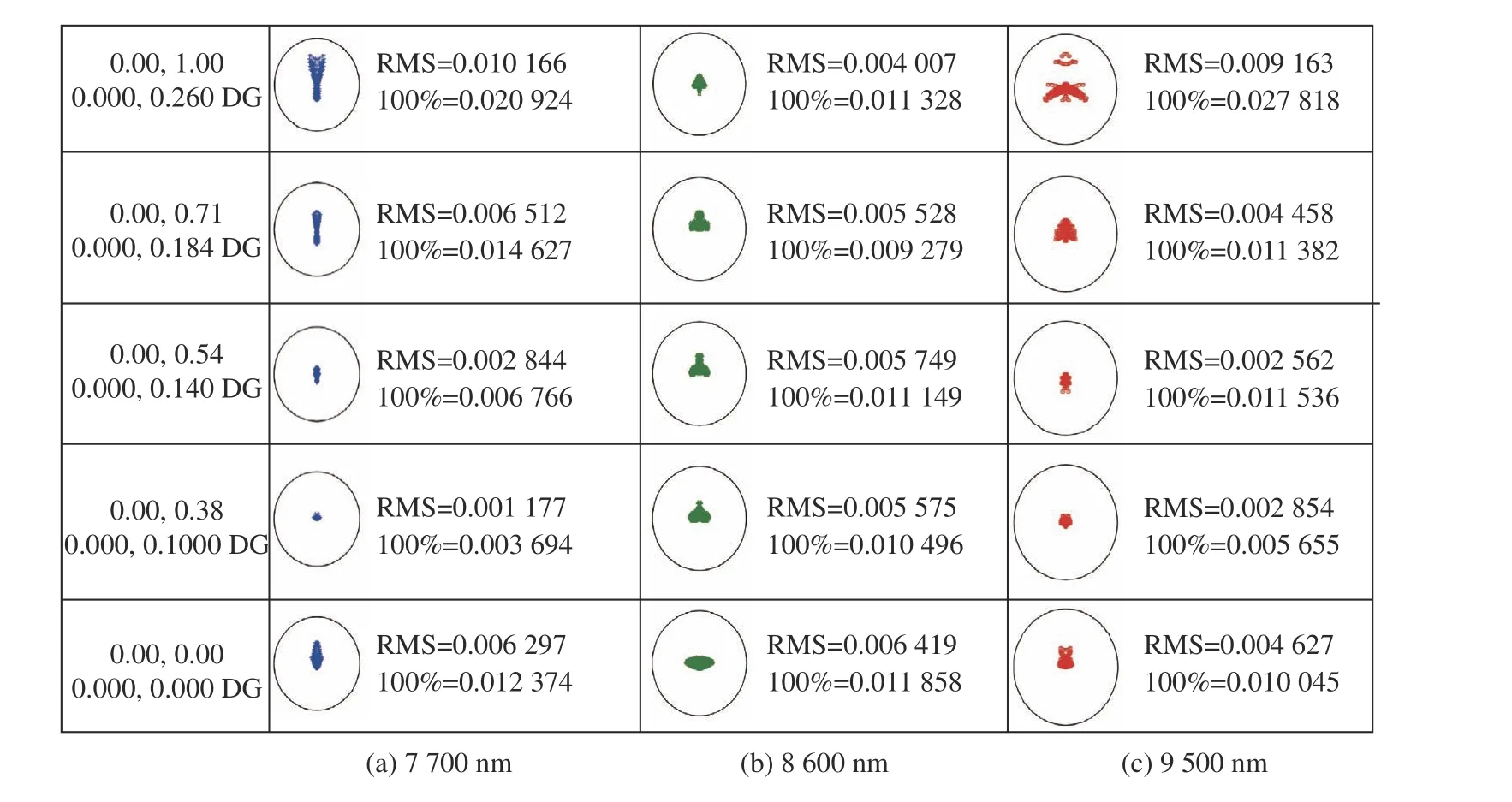
圖18 波長為(a) 7700 nm; (b) 8600 nm; (c) 9500 nm時的點列圖Fig.18 Spot diagram at (a) 7700 nm; (b) 8600 nm; (c) 9500 nm
5 結論
為了獲取地球靜止軌道的高動態光譜數據,設計了一種基于壓縮感知的全譜段成像光學系統。該系統通過物鏡無焦化設計以滿足衛星軌道震動補償的需求并使用分色片將光學系統譜段細化,以實現全譜段的探測,經過優化設計,系統結構緊湊,點列圖能量集中于艾里斑,各部分MTF均接近衍射極限,像質良好,光譜分辨率分別為可見光20 nm、中波紅外50 nm、長波紅外150 nm,滿足設計要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32