
純電動汽車驅動系統調試概論
2021-11-26 05:16:50肖聰
汽車電器 2021年11期
肖 聰
(東風汽車股份有限公司商品研發院, 湖北 武漢 430056)
新能源汽車是發展趨勢,純電動汽車也越來越普及,驅動系統作為純電動汽車的核心系統之一而備受關注,如何驗證驅動系統的各項電氣性能非常重要。本文將根據自身在工作中的經驗,以純電動汽車為原型,闡述電動汽車的驅動系統調試過程。
驅動系統電器設備主要是電機與電機控制器,調試驅動系統性能就是要驗證電機、電機控制器相結合的驅動系統的電氣特性是否符合設計要求。調試包括資料準備、設備檢查、靜態測試、路試測試等多個方面,下文具體介紹。
1 準備工作
1.1 資料準備
準備以下材料,確保產品信息的完整性、可靠性。①電控的尺寸圖紙、接口定義表、功能需求表、系統原理圖、通信協議、控制邏輯流程圖、故障定義表等技術資料;②配套樣車的驅動系統臺架標定報告;③具有CNAS認證的匹配樣車的驅動系統檢驗報告;④驅動系統各部件的出廠檢驗合格報告;⑤電機電控完整的故障模擬報告;⑥其他需要的材料。
1.2 驅動系統電氣檢測
通過下列項目,檢測實物供貨狀態的一致性、可靠性。
1) 低壓電源電氣檢查。使用萬用表測試低壓電源LV接線定義和電壓。
2) CAN通信電氣檢查。使用萬用表測試CAN總線接線定義和終端電阻配置。
3) 端子使能電氣檢查。使用萬用表測試電機旋變信號接線定義。
4) 電機溫度信號檢查。使用萬用表測試電機溫度傳感器接線定義及阻值溫度關系。
5) 絕緣電阻測試。使用絕緣表分別測試MCU正負輸入回路及輸出三相回路絕緣電阻并記錄。
6) 高壓電源電氣檢查。使用萬用表測試電機控制器端高壓電源與PDU高壓配電箱端接線定義。
7) 電機U/V/W電氣檢查。使用萬用表測試電機控制器端U/V/W與電機端U/V/W接線定義。
1.3 整車裝配確認
調試前,需確認所需調試車輛的總成已經正確裝配:①冷卻液、轉向油液、驅動橋齒輪油、制動液等均已加注,且無漏液現象;②制動管路卡箍已擰緊,且管路得到可靠固定;③電線束均已插接并合理固定;④制動性能和轉向性能已調試完成;⑤控制程序已按前期協議更新到最新狀態。
2 測試內容
在調試過程中,通過CAN卡監控整個過程,收集輸出頻率、電機轉速、輸出電流、控制器溫度、電機溫度、輸入電壓、實際轉矩、請求扭矩、擋位信號、驅動模式等參數。同時,使用示波器及高壓查分探頭測量母線電壓,以及通過示波器及直流探頭監測母線回饋電流。
整改調試內容分為靜態功能測試 (電機脫軸0負載)、路試功能測試、路試性能測試三大項,每一大項都包含很多小項內容,具體如下。
2.1 靜態功能測試 (電機脫軸0負載)
2.1.1 電角度學習測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,使用上位機/鍵盤控制電控自學習電機電角度。
2) 判斷依據:讀取的電角度值應符合設計要求。
2.1.2 靜態單機功能測試 (上位機或鍵盤)
2.1.2.1 轉速功能測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,使用上位機/鍵盤控制運行在轉速模式,按照正反轉分別進行2次試驗 (最高試驗轉速為10%*最高轉速),現場可酌情修改測試點。通過鍵盤監控整個過程——輸出頻率、電機轉速、輸出電流、控制器溫度、電機溫度、輸入電壓、實際轉矩等參數。
2) 判斷依據:電機轉速按測試要求運行,不報任何故障。
2.1.2.2 轉矩功能測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,使用上位機/鍵盤控制運行在轉矩模式,按照正負給定分別進行2次試驗 (最大試驗轉矩為50%*額定轉矩),現場可酌情修改測試點。通過鍵盤監控整個過程——輸出頻率、電機轉速、輸出電流、控制器溫度、電機溫度、輸入電壓、實際轉矩等參數。
2) 判斷依據:電機轉矩按測試要求運行,不報任何故障。
2.1.3 靜態聯調功能測試 (VCU)
2.1.3.1 驅動功能測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,設置安全轉速限制值,油門踏板緩慢踩至最大開度,保持10s后,松開油門踏板自由減速。按照D擋和R擋分別進行2次試驗(最大試驗轉速限制為額定轉速),現場可酌情修改測試點。
2) 判斷依據:電機按測試要求運行,不報任何故障。
2.1.3.2 制動功能測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,設置安全轉速限制值,油門踏板緩慢踩至最大開度,保持10s后,松開油門踏板,緩慢踩制動踏板至最大開度,至轉速為0。按照D擋和R擋分別進行2次試驗 (最大試驗轉速限制為額定轉速),現場可酌情修改測試點。
2) 判斷依據:電機按測試要求運行,不報任何故障。
2.1.3.3 擋位切換測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,整車模式,設置安全轉速限制值,在與VCU確認具備換擋保護策略時在安全轉速點以下進行換擋操作。按照D->R擋和R->D擋分別進行2次試驗 (試驗轉速限制>策略設定安全轉速點)。與VCU確認換擋策略 (在高速時,誤掛擋的安全保護策略),換擋試驗在換擋安全轉速點以下進行。若VCU有非法換擋保護策略,則跟客戶溝通進行驗證,并在測試結論中詳細記錄保護策略及測試結果。
2) 判斷依據:電機按測試要求運行,不報任何故障。
2.1.3.4 運行關鑰匙測試
1) 測試方法:脫開傳動軸,保持電機輸出軸0負載,整車模式,設置安全轉速限制值,在確認VCU具備運行過程中關鑰匙安全保護策略的前提下進行關鑰匙操作。置D擋和R擋分別進行2次試驗 (試驗轉速限制>策略設定安全轉速點。若VCU有運行過程關鑰匙保護策略,則跟客戶溝通進行驗證,并在測試結論中詳細記錄保護策略及測試結果。
2) 判斷依據:電機按測試要求運行,不報任何故障。
2.2 路試功能測試
2.2.1 驅動測試
2.2.1.1 平路蠕行測試
1) 測試方法:在平路的工況下,車輛按照D擋和R擋,分別進行整車蠕行功能測試。
2) 判斷依據:控制策略需符合設計要求,同時車輛應運行平穩,無頓挫,輸出頻率不應有抖動。
2.2.1.2 平路慢加速測試
1) 測試方法:在平路工況下,按照以下方式分別進行測試:①D擋模式:車輛從靜止狀態或蠕行車速開始,每隔1s輕踩加速踏板;②D擋模式:車輛靜止狀態,緩踩加速踏板至剛可以起步;③R擋模式:車從0速或蠕行車速開始,輕踩加速踏板至R擋最高車速。
2) 判斷依據:控制策略需符合設計要求,同時車輛應運行平穩,無頓挫,輸出頻率不應有抖動。
2.2.1.3 平路急加速測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態,快速踩加速踏板至最大開度,車輛加速至最高車速。
2) 判斷依據:①控制策略需符合設計要求,同時車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。②母線電壓最大值不超過控制器母線電壓過壓點,母線電壓最小值不低于控制器母線電壓欠壓點。
2.2.1.4 平路起步測試
1) 測試方法:在平路工況下,按照以下方式分別進行測試:①開啟D擋模式,車輛從靜止狀態,加速踏板分別以25%、50%加速至最高車速。②開啟R擋模式,車輛從靜止狀態,加速踏板分別以25%、50%加速至最高車速。
2) 判斷依據:控制策略需符合設計要求,同時車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.1.5 平路勻速運行測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在40km/h、60km/h、80km/h、最高車速保持勻速行駛10min。
2) 判斷依據:控制策略需符合設計要求,同時車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.1.6 小油門低速運行測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態控制小油門起步并使車速分別穩定在5km/h、10km/h、15km/h、20km/h。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.1.7 連續快速踩油門測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在5km/h、10km/h、15km/h、20km/h車速下,快速將油門踏板踩到底,持續2s左右,然后快速松開,持續2s左右,再快速踩到底,反復松、踩5次。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.1.8 坡道起步測試
1) 測試方法:在坡道工況下,開啟D擋模式,按照以下方式分別進行測試:①在坡底,車輛從靜止狀態起步,油門踩到底加速,測試最大爬坡度及最大爬坡車速,進行2次試驗;②車輛在半坡停穩后,油門踩到底加速爬坡,測試最大爬坡度及最大爬坡車速,進行2次試驗。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.2 制動回饋測試
2.2.2.1 車輛穩速運行中,輕踩制動測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛以最高行駛車速穩速行駛,踩制動踏板分別以25%、50% (可以不要求精確) 點剎至車輛停止,進行2次測試 (需要多次踩制動嘗試,不能出現機械制動)。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率變化平緩且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.2.2 車輛穩速運行中,急踩制動測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在60km/h、80km/h、最高車速下,快速踩制動踏板保證最大點剎至停車 (需要多次踩制動嘗試,不能出現機械制動)。
2) 判斷依據:①控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率變化平緩且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。②母線電壓最大值不超過控制器母線電壓過壓點,母線電壓最小值不低于控制器母線電壓欠壓點。
2.2.2.3 車輛穩速運行中,快速松踩制動測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在40km/h、60km/h、80km/h、最高車速下,快速松、踩制動踏板多次,松、踩間隔2s左右。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率變化平緩且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.2.3 滑行測試
2.2.3.1 滑行回饋扭矩測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在40km/h、60km/h、80km/h、最高車速下,松開加速踏板,讓車輛滑行至停車或蠕行。
2) 判斷依據:松開加速踏板后整車平緩減速,在車速低于設定值后退出滑行回饋狀態,退出過程輸出電流、轉矩變化平緩,無頓挫感。
2.2.3.2 滑行回饋,制動退出測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛從分別在40km/h、60km/h、80km/h、最高車速下,松開加速踏板,延遲5s左右踩制動踏板,車輛應按照策略設計退出滑行模式。
2) 判斷依據:在踩制動踏板后控制器能在設定時間內退出滑行回饋并響應制動指令,切換過程平緩,無頓挫感。
2.2.3.3 滑行回饋,油門退出測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛分別在40km/h、60km/h、80km/h、最高車速下,松開加速踏板,延遲5s左右踩油門踏板,車輛應按照策略設計退出滑行模式。
2) 判斷依據:在踩加速踏板后控制器能在設定時間內退出滑行回饋并響應加速指令,切換過程平緩,無頓挫感。
2.2.4 切換測試
2.2.4.1 驅動/制動切換測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛進行加速/制動切換操作,分別在SOC為100%、60%、40%及最低限功臨界點,按照圖1所示的設定車速曲線進行驅動/制動試驗,在每個目標轉速點保持穩速行駛30s,測試行駛性能(轉速轉矩曲線) 和行駛舒適性。
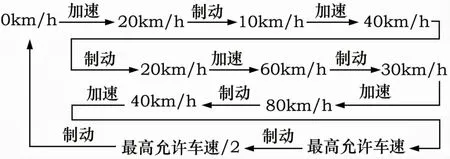
圖1 驅動/制動切換試驗
2) 判斷依據:控制策略需符合設計要求,車輛切換過程平緩,無頓挫感。
2.2.4.2 滑行/驅動切換測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛進行滑行/驅動切換操作,分別在SOC為100%、60%、40%及最低限功臨界點,按照圖2所示的設定車速曲線進行滑行/驅動試驗,在每個目標轉速點保持穩速行駛30s,測試行駛性能(轉速轉矩曲線) 和行駛舒適性。
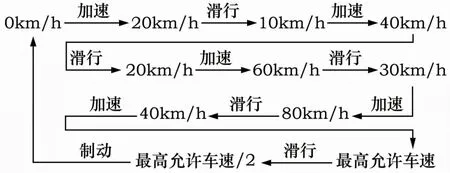
圖2 滑行/驅動切換試驗
2) 判斷依據:控制策略需符合設計要求,車輛切換過程平緩,無頓挫感。
2.2.4.3 滑行/制動切換測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛進行滑行/制動切換操作,分別在SOC為100%、60%、40%及最低限功臨界點,按照圖3所示的設定車速曲線進行滑行/制動試驗,在每個目標轉速點保持穩速行駛30s,測試行駛性能(轉速轉矩曲線) 和行駛舒適性。

圖3 滑行/制動切換試驗
2) 判斷依據:控制策略需符合設計要求,車輛切換過程平緩,無頓挫感。
2.3 路試性能測試
2.3.1 最高車速測試
2.3.1.1 D擋最高車速測試
2.3.1.1.1 1km最高車速
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態,分別測試在SOC≥95%和SOC最低限功臨界點時,車輛能達到的最高車速 (能夠往返各持續形式1km以上距離的最高車速平均值),各進行2次試驗。
2) 判斷依據:①車輛應加速平穩、無頓挫,輸出頻率應平緩上升且無抖動;②車速應保持在最高車速設計值附近,波動范圍不大于±5km/h,且限速過程平穩。
2.3.1.1.2 30min最高持續車速
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態,分別測試在SOC≥95%和SOC最低限功臨界點時,車輛能達到的30min最高車速 (能夠持續行駛30min以上的最高車速平均值),各進行2次試驗。
2) 判斷依據:①車輛應加速平穩,無頓挫,輸出頻率應平緩上升且無抖動;②車速應保持在最高車速設計值附近,波動范圍不大于±5km/h,且限速過程平穩。
2.3.1.2 R擋限速測試
1) 測試方法:在平路工況下,開啟R擋模式,車輛從靜止狀態,分別測試在SOC≥95%和SOC最低限功臨界點時,車輛在R擋所能達到的最高車速,各進行2次試驗。
2) 判斷依據:①車輛應加速平穩,無頓挫,輸出頻率應平緩上升且無抖動;②車速應保持在最高車速設計值附近,波動范圍不大于±5km/h,且限速過程平穩。
2.3.2 最大爬坡測試
1) 測試方法:開啟D擋模式,選擇試驗坡道≥整車設計最大坡度,測試最大爬坡度及最大爬坡車速 (能夠在試驗坡道上持續行駛1km以上的最高平均車速),進行2次試驗。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.3.3 加速性能測試
2.3.3.1 0—50km/h加速時間測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態,加速踏板快速踩至最大開度,在SOC≥95%時,測試車輛0—50km/h加速時間,進行4次試驗,計算平均加速時間。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.3.3.2 50—80km/h加速時間測試
1) 測試方法:在平路工況下,開啟D擋模式,車輛從靜止狀態,加速踏板快速踩至最大開度,在SOC≥95%時,測試車輛50—80km/h加速時間,進行4次試驗,計算平均加速時間。
2) 判斷依據:控制策略需符合設計要求,車輛應運行平穩,無頓挫,輸出頻率應平緩上升且無抖動,電機實際扭矩應滿足VCU給定且扭矩波動小于20Nm。
2.3.4 防溜坡測試
2.3.4.1 防溜性能測試
1) 測試方法:在坡道工況下,開啟D擋模式,按照以下方式分別進行測試:①選擇試驗坡道≥整車設計最大坡度,車輛行駛至半坡,快速松開油門,測試車輛防后溜距離及防后溜模式保持時間,進行2次試驗。②選擇試驗坡道≥整車設計最大坡度,車輛行駛至半坡,快速松油門->踩制動->松制動,測試車輛防后溜距離及防后溜模式保持時間,進行2次試驗。
2) 判斷依據:車輛平穩進入防后溜模式,防后溜距離及防后溜保持時間滿足設計需求。
2.3.4.2 防溜模式,油門/制動退出測試
1) 測試方法:在坡道工況下,開啟D擋模式,按照以下方式分別進行測試:①選擇試驗坡道≥整車設計最大坡度,車輛進入防后溜模式,踩制動踏板。響應制動請求進行2次試驗。②選擇試驗坡道≥整車設計最大坡度,車輛進入防后溜模式,踩加速踏板,響應加速請求進行2次試驗。
2) 判斷依據:車輛應按照策略設計退出防后溜模式,同時車輛退出防后溜模式響應平穩,無頓挫。
2.3.5 放電測試
2.3.5.1 主動放電測試
1) 測試方法:車輛在靜止情況下擰鑰匙上高壓,車輛正常上高壓后,擰鑰匙下電。
2) 判斷依據:主動放電過程中,MCU電壓下降到60V用時應該小于設計要求,且整車無任何故障。
2.3.5.2 被動放電測試
1) 測試方法:車輛在靜止情況下擰鑰匙上高壓,車輛正常上高壓后,先取消主動放電功能,再擰鑰匙下電。
2) 判斷依據:被動放電過程中,MCU電壓下降到60V時應該小于設計要求,且整車無任何故障。
2.3.6 主動防抖測試
1) 測試方法:在比利時路等顛簸工況下,開啟D擋模式,車輛正常行駛,測試抖動情況。
2) 判斷依據:主動防抖進入和退出條件應符合設計要求,不會引起誤介入,能夠有效抑制抖動,且整車無任何故障。
2.3.7 續航里程測試
2.3.7.1 續航里程測試
1) 測試方法:在動力蓄電池完全充電狀態下,同時不開啟空調等大功率高壓輔件,車輛以特定的工況進行行駛測試,或者在實驗室進行NEPC等工況測試,記錄能連續行駛的最大里程,進行4個完整循環。
2) 判斷依據:整車應符合設計要求,行駛不報任何故障。
2.3.7.2 能量消耗率測試
1) 測試方法:經過規定的試驗循環后對動力蓄電池重新充電達到試驗前電量,從電網上獲取的電能除以行駛里程所得的值;進行4次里程試驗后計算。
2) 判斷依據:整車應符合設計要求。
3 調試應用
驅動系統的控制核心是電機控制器,電機控制器負責驅動系統的協調控制。驅動系統調試一方面是驅動系統控制策略的實現驗證,另一方面是驅動系統功能測試。在試制車輛裝車完成后,需要驅動系統進行功能測試。根據經驗,常利用PCAN采集分析,具體解釋如下。
3.1 軟件使用
常用的CAN卡工具是PCAN,這里重點介紹,分析報文主要有兩種方式:一是利用PCAN直接監測網絡上的信號,或利用PCAN的數據記錄功能先記錄數據,然后利用PCAN分析記錄的數據。離線分析數據主要用于對已發現的問題進行分析,分為3步:即場景再現、記錄數據、分析數據。二是利用PCAN直接進行數據監測。本文中采用先記錄數據再分析數據的方法,這樣的好處是便于離線后仔細分析。
采集數據前,一定要把波特率設置合適,否則就不能接收到數據。設置波特率的位置具體如圖4所示。PCAN配置好后,把CANH和CANL插入到有電機控制器節點的CAN線上進行數據采集,最后通過DBC文件解析數據。
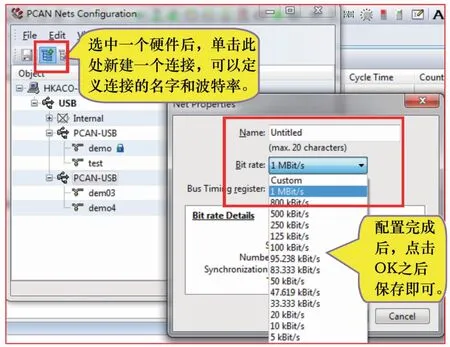
圖4 設置波特率
3.2 功能調試
根據調試內容采集報文。根據分析的報文判斷調試的項目是否符合設計要求,如果符合要求,就繼續下一項,如果不符合要求,需要完善程序,再進行點檢確認。數據分析如圖5所示。
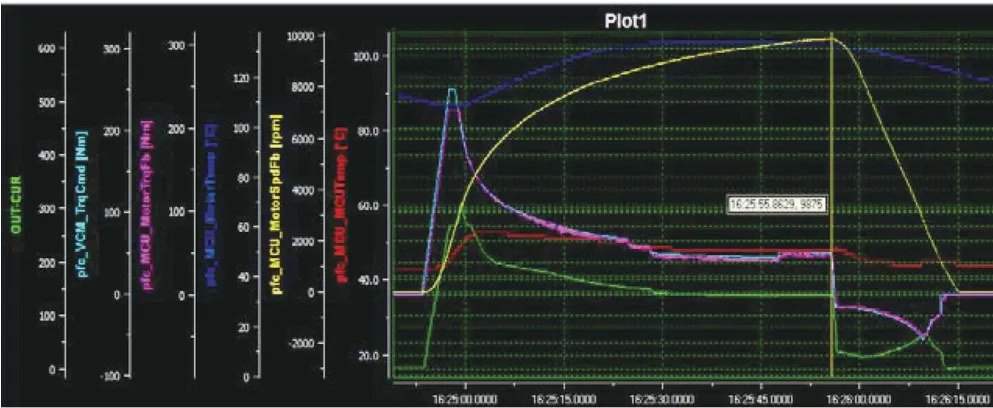
圖5 數據分析圖
3.3 故障模擬
驅動系統會根據不同的故障對故障處理進行分類,主要分為無故障、一級故障、二級故障、三級故障等4類故障等級,其中一級故障只報警而不限扭矩,二級故障要限制扭矩到峰值轉矩的50%值,三級故障直接要求不輸出扭矩。當到達故障診斷條件時,控制器會報出相應的故障,并根據故障對應的故障等級進行處理,只有滿足故障恢復條件后,控制器才能消除故障,恢復正常。通過模擬一級二級三級故障,來驗證驅動系統的故障處理機制的可靠性。
4 結束語
本文較全面介紹了驅動系統的調試方案,詳細說明了準備工作、調試內容、軟件應用,通過上述的方法能夠有效調試驗證驅動系統的主要性能,為純電動汽車的動力性能和安全性提供了可靠的保障,具有一定的參考價值。
