基于大蒜根盤特征的精確切根機構優化設計
2021-11-27 13:29:08陳建能賈江鳴陳天龍蔡雙雷喻陳楠
浙江農業學報 2021年11期
關鍵詞:優化
陳建能,周 赟,賈江鳴,*,陳天龍,蔡雙雷,喻陳楠
(浙江理工大學 a. 機械與自動控制學院;b. 浙江省種植裝備技術重點實驗室,浙江 杭州 310018)
我國大蒜種植面積超過40萬hm2,占全球種植面積85%以上,總產量達2 000萬t[1-3]。大蒜加工產品包括蒜粒和蒜瓣,都需要對大蒜進行多道工序處理,包括大蒜的切須、切根、打散、去皮、清洗、晾干和包裝等。其中,大蒜的切須、打散和去皮等工序的設備相對成熟;但大蒜切根設備相對落后,效率低下、效果差、蒜肉浪費嚴重[4-5]。可見大蒜的切根工序已經成為制約大蒜產業發展的主要因素之一[6-7]。
大蒜切根既要保證大蒜根盤的完全切除,也要避免大蒜蒜肉的大量浪費。現有的大蒜切根方式主要包括凹切式、平切式和鉆削式。手動凹切式切根效果好、蒜肉浪費少,但需要手持大蒜進行切根,效率低,且受人為因素影響較大[8];大型凹切式切根設備基本實現了自動化切根,但其切根刀片的軌跡不理想,經常出現根盤切除不完全和蒜肉浪費現象[9]。以平切方式為主的小型切根機效率低,由于采用平切,導致大蒜浪費更為嚴重或者切除不干凈[10]。鉆削式的切根設備切根效率高,但只能用于紅蒜的切根,且切根時大蒜受鉆削刀頭的擠壓影響,導致蒜粒、蒜瓣損傷,蒜肉浪費也不可避免[11-13]。綜上,現有的大蒜切根機器不能進行精確切根,存在著切根不徹底或蒜肉浪費嚴重等問題。為此,本文對大蒜及其根盤尺寸進行統計分析,以大蒜根盤的完全切除和降低蒜肉浪費為目標,提出一種基于大蒜根盤特征的精確切根機構,并進行參數優化和試驗研究。
1 大蒜切根的農藝要求與切根機總體方案設計
1.1 大蒜根盤尺寸特征分析
本文統計的大蒜來自山東某大蒜深加工企業,該企業根據大蒜不同大小分為4種規格,主要尺寸包括:大蒜直徑d1、根盤直徑d2、大蒜高度l1、徑面高度l2、根盤高度l3(圖1)。對4種規格各100個大蒜進行測量統計分析,結果見表1。由表1可知,大蒜根盤高度在4~5 mm,根盤直徑為10~20 mm。為保證根盤的完全切除,確定根盤高度5 mm,根盤直徑20 mm,即切除如圖2所示的類圓錐形根盤。

d1,大蒜直徑;d2,根盤直徑;l1,大蒜高度;l2,徑面高度;l3,根盤高度。d1, Garlic diameter; d2, Root diameter; l1, Garlic height; l2, Diameter height; l3, Root height.圖1 大蒜尺寸示意圖Fig.1 Garlic size diagram

表1 大蒜尺寸統計分析結果

圖2 大蒜根盤簡圖Fig.2 Diagram of garlic root
1.2 大蒜切根工藝流程與總體方案設計
為提高大蒜切根效率、提高自動化程度,除人工上料外,其余的工序,如輸送、壓緊、切根和落料等都自動完成。大蒜切根工藝的總體設計方案(圖3)參考了文獻[14]的思路。作業時,大蒜通過人工上料,需保證大蒜根部朝下并兼顧一定的放置姿態。大蒜輸送機構為步進式輸送,主要完成整個切根過程大蒜的承載和輸送,并保證大蒜姿態穩定。大蒜輸送到預定位置,輸送機構暫停,壓緊機構壓住大蒜,保證切根時大蒜姿態穩定,且不讓刀。然后切根,盡可能減小蒜肉浪費并保證根盤完全切除,切下的根盤直接掉落下方,切根后的大蒜仍然停留在輸送機構上。切根結束后,壓緊機構退回,輸送機構步進,切根后的大蒜到轉彎處,在重力作用下自由下落,完成落料。以上的輸送、壓緊、切根3大動作在控制系統協調下有序進行。

1,放置板前進方向;2,上料位置;3,下壓位置;4,切根位置;5,輸送線電機。1, Forward direction of placing plate; 2, Feeding position; 3, Pressing position; 4, Root cutting position; 5, Conveying line motor.圖3 大蒜切根裝置設計簡圖Fig.3 Design drawing of garlic root cutting machine
2 大蒜切根機構分析模型的建立與參數優化
2.1 機構的提出
根據圖2大蒜根盤尺寸特征,采用咬合式切割,使切根軌跡和大蒜根盤尺寸特征相近,如圖4所示。據此設計切根機構,曲柄OA旋轉運動,通過曲柄搖桿機構使桿BE擺動,桿BE與第一齒輪固定連接,第一齒輪和第二齒輪嚙合,桿DF與第二齒輪固定連接使桿DF擺動,實現大蒜切根的咬合動作。

1,曲柄;2,連桿;3,搖桿;4,機架;5,刀具;6,第一齒輪;7,第二齒輪;8,根盤;9,切割軌跡。1, Crank; 2, Connecting rod; 3, Rocker; 4, Frame; 5, Tool; 6, First gear; 7, Second gear; 8, Root plate; 9, Cutting track.圖4 大蒜切根機構簡圖Fig.4 Structural diagram of garlic root cutting mechanism
2.2 大蒜切根運動學模型的建立與參數影響分析
2.2.1 運動學模型的建立
以曲柄轉動中心O點為原點,水平方向為x軸,垂直方向為y軸建立坐標系,建模過程如下:
由封閉圖形OABC,建立機構矢量方程:
OA+AB=OC+CB。
(1)
轉化為解析形式,則鉸鏈點A的坐標為
(2)
其中,L1為鉸鏈點OA之間的距離,α1為桿OA與x軸的夾角。
同理,鉸鏈點B的坐標
(3)
其中,xC為鉸鏈點C的x軸坐標,yC為鉸鏈點C的y軸坐標,L2為鉸鏈點AB之間的距離,L3為鉸鏈點BC之間的距離,α2為桿AB與x軸的夾角,α3為桿BC與x軸的夾角。
另外,根據機構簡圖有
(4)
設AC與x軸的夾角為β,則有
(5)
第一刀具刃口E坐標為
(6)
式(6)中,L5為刀具長度。
第二刀具刃口F坐標為
(7)
式(7)中,D為鉸鏈點CD之間的距離,xD為鉸鏈點D的x軸坐標,yD鉸鏈點D的y軸坐標。
2.2.2 參數影響分析
采用Matlab2017b,根據2.2.1節建立的運動學模型編寫大蒜切根機構仿真分析軟件,如圖5所示。該軟件可根據所輸入的初始參數對大蒜切根機構進行運動學仿真,得到刀具刃口軌跡,并輸出大蒜在最大截面蒜肉的損失值。

1,菜單欄;2,圖像顯示區;3,初始參數輸入區;4,優化參數設置區;5,優化控制區;6,優化結果輸出區。1, Menu bar; 2, Image display area; 3, Initial parameter input area; 4, Optimization parameter setting area; 5, Control area of optimization; 6, Output area of optimized results.圖5 大蒜切根機構仿真分析軟件Fig.5 Software interface for simulation analysis of garlic root cutting mechanism
大蒜切根機構的理想作業性能為大蒜根盤完整切除,盡可能減少大蒜蒜肉損失。通過仿真分析軟件就若干關鍵參數對大蒜切根機構的作業效果進行分析,并以理想作業性能為目標進行參數初步優選。
a)曲柄OA長度L1。L2=150 mm,L3=250 mm,L4=325 mm,L5=130 mm,δ=75°,D=100 mm時,曲柄OA的長度L1與切根軌跡的關系如圖6所示。隨著OA的長度L1的增大,左右刀具的切根軌跡開口閉合程度逐漸增大,切根軌跡開口的閉合程度影響大蒜根盤能否完整切除。顯然,對大蒜蒜肉損失無影響。故曲柄OA的長度L1僅對大蒜根盤完整切除有顯著影響。

由于在不同L1長度下,對應的3條切根軌跡重疊,不利于觀察,因此使刀具軌跡整體在實際切根軌跡的基礎上沿著垂直方向做了偏移。Since the corresponding three root cutting tracks overlapped at different L1 lengths, it was not conducive to observation, so the overall tool path was offset along the vertical direction on the basis of the actual root cutting tracks.圖6 L1與切根軌跡之間的關系Fig.6 Relationship between L1 and root cutting track
b)連桿AB長度L2。當L1=65 mm,L3=250 mm,L4=325 mm,L5=130 mm,δ=75°,D=100 mm時,連桿AB的長度L2與切根軌跡的關系如圖7所示。隨著AB的長度L2的增大,左右刀具的切根軌跡開口閉合程度逐漸減小。顯然,對大蒜蒜肉損失無影響。故連桿AB的長度L2僅對大蒜根盤完整切除有顯著影響。

由于在不同L2長度下,對應的3條切根軌跡重疊,不利于觀察,因此使刀具軌跡整體在實際切根軌跡的基礎上沿著垂直方向做了偏移。Since the corresponding three root cutting tracks overlapped at different L2 lengths, it was not conducive to observation, so the tool path as a whole was offset along the vertical direction on the basis of the actual root cutting track.圖7 L2與切根軌跡之間的關系Fig.7 Relationship between L2 and root cutting track
c)連桿BC長度L3。當L1=65 mm,L2=150 mm,L4=325 mm,L5=130 mm,δ=75°,D=100 mm時,連桿BC的長度L3與切根軌跡的關系如圖8所示。隨著BC長度L3的增大,左右刀具的切根軌跡開口閉合程度逐漸減小。顯然,對大蒜蒜肉損失無影響。故連桿BC的長度L3僅對大蒜根盤完整切除有顯著影響。
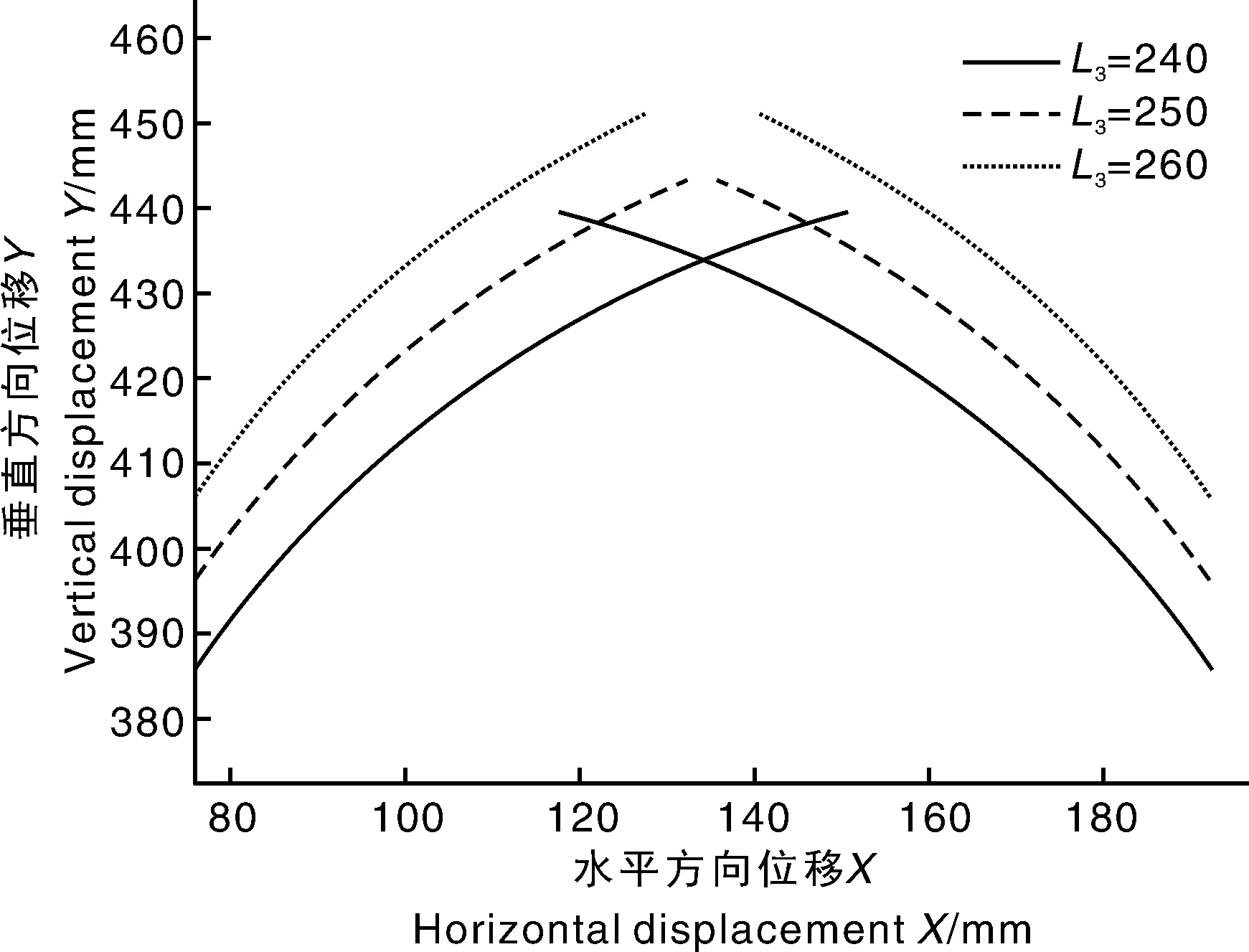
由于在不同L3長度下,對應的3條切根軌跡重疊,不利于觀察,因此使刀具軌跡整體在實際切根軌跡的基礎上沿著垂直方向做了偏移。Since the corresponding three root cutting tracks overlapped at different L3 lengths, it was not conducive to observation, so the tool path as a whole was offset along the vertical direction on the basis of the actual root cutting track.圖8 L3與切根軌跡之間的關系Fig.8 Relationship between L3 and root cutting track
d)刀具刃口與刀具轉動中心的距離L5。當L1=65 mm,L2=150 mm,L3=250 mm,L4=325 mm,δ=75°,D=100 mm時,刀具刃口與刀具轉動中心的距離L5與切根軌跡的關系如圖9所示。隨著刀具刃口與刀具轉動中心的距離L5的增大,左右刀具的切根軌跡開口閉合程度逐漸減小(圖9-A)。隨著刀具刃口與刀具轉動中心距離L5的增大,左右刀具的切根軌跡逐漸偏離根盤截面輪廓,即大蒜蒜肉損失量逐漸增大(圖9-B)。刀具刃口與刀具轉動中心的距離L5對大蒜根盤完整切除有顯著影響,且對大蒜蒜肉損失具有一定的影響。

A,切根軌跡;B,根盤與切根軌跡的相對位置。A, Root cutting locus; B, Relative position of the root disk and the cutting root locus.圖9 L5與切根軌跡之間的關系Fig.9 Relationship between L5 and root cutting track
e)刀具回轉中心距D。當L1=65 mm,L2=150 mm,L3=250 mm,L4=325 mm,L5=130 mm,δ=75°時,刀具回轉中心距D與切根軌跡的關系如圖10所示。由圖10-A可知,隨著刀具回轉中心距D的增大,大蒜切根位置逐漸向右偏移;左右刀具的切根軌跡開口閉合程度逐漸減小,但不明顯。由圖10-B可知,隨著刀具回轉中心距D的增大,左右刀具的切根軌跡逐漸偏離根盤截面輪廓,即大蒜蒜肉損失量逐漸增大。刀具刃口與刀具轉動中心的距離L5對大蒜根盤完整切除有一定的影響,且對大蒜蒜肉損失具有顯著影響。

A,切根軌跡;B,根盤與切根軌跡的相對位置。由于在不同D長度下,切根軌跡重疊,不利于觀察,因此使刀具軌跡整體在實際切根軌跡的基礎上沿著垂直方向做了偏移。A, Root cutting locus; B, Relative position of the root disk and the cutting root locus. Because the root cutting track overlapped at different D lengths, it was not conducive to observation, so the tool path as a whole was offset along the vertical direction based on the actual root cutting track.圖10 D與切根軌跡之間的關系Fig.10 Relationship between D and root cutting track
從上面的參數影響分析可知,大蒜切根機構與曲柄搖桿機構的長度L1、L2、L3和刀具回轉中心距D,以及刀具刃口與刀具轉動中心的距離L55個參數有關,通過人工調整參數結合軟件的輸出圖形判斷,可以得到一組較優解X=[75,159,250,130,100]。人工調參得到的參數為較優解并非最優解,因此建立優化模型進行參數優化,并將較優解作為優化模型的初始解。
2.3 優化模型建立
2.3.1 設計變量
選擇2.2.2節的5個參數作為設計變量,X=[L1,L2,L3,L5,D]。
2.3.2 目標函數
以大蒜根盤完全切除且盡量減少蒜肉浪費為目標建立優化模型,即切根機構刀具軌跡盡量接近大蒜根盤尺寸特征。如圖11,基于大蒜橫截面分析,從大蒜主體分離出來的部分包含大蒜根盤(區域2)和浪費的蒜肉(區域3),則要使大蒜蒜肉浪費最小,即區域3的面積最小,用S3表示區域3的面積。因此,在大蒜切根機構理想作業性能下,蒜肉浪費量F(x)設定如下:
(8)
(9)
(10)
式(8)~(10)中,h0為根盤的高度,w0為根盤底邊的寬度,w為軌跡底邊的寬度。

1,切根軌跡;2,大蒜根盤;3,浪費的蒜肉。圖中K點為鉸鏈點C和鉸鏈點D連線的中點。1, Root cutting track; 2, Garlic root disk; 3, Wasted garlic meat. Point K in the figure was the midpoint of the connection between hinge point C and hinge point D.圖11 大蒜橫截面分析圖Fig.11 Analysis diagram of garlic cross section
2.3.3 約束方程
1)為保證大蒜切根機構中曲柄搖桿機構存在曲柄條件,對曲柄搖桿機構設置桿長約束,其表達式為
(11)
2)如圖12,為保證大蒜切根機構滿足完整切根的條件,對曲柄搖桿機構的極位夾角設置約束,其表達式為
θ-(θ0-θ1)≤0;
(12)
(13)
(14)

圖12 大蒜切根機構極位夾角位置Fig.12 The extreme angle position of garlic cutting mechanism
3)為保證大蒜切根機構刀具刃口在切根終點滿足恰好接觸的條件,對切根機構參數設置約束,其表達式為
(15)
4)由上述仿真分析軟件與參數影響分析可知,構件尺寸具有一定的限制,可統一表達成
Xmin≤Xi≤Xmax(i=1,2,3,4,5)。
(16)
故添加機構優化的設計約束時,對自變量的條件限定為
(17)
2.4 優化結果分析
根據以上優化模型,采用隨機方向法編寫優化軟件,進行參數優化,以2.2.2節得到的較優解X=[75,159,250,130,100]作為初始解,最優解為X=[76.5,137.4,290.4,143.5,118.2],目標函數值F=1.634;人工調整得到較優解X=[75,159,250,130,100]的目標函數值F=5.185,優化效果顯著。如圖13,最優解的切根軌跡比初始解的切根軌跡更加貼近大蒜根盤,蒜肉浪費更少。通過上述分析可知,目標函數值表示大蒜在某一截面浪費的大蒜蒜肉截面積的值,因此大蒜蒜肉浪費相對值可通過目標函數值的比值來計算,即優化后的蒜肉浪費為優化前的31.51%。

圖13 切根優化軌跡對比Fig.13 Comparison of root cutting optimization trajectory
3 大蒜切根機構與切根裝置整機結構設計
根據第2節的最優參數,進行大蒜切根機構與切根裝置整機結構設計。
3.1 大蒜切根機構結構設計
設計同時對4個大蒜切根,采用2組切根機構對稱布置以提高剛度,增加切根機構穩定性和切根的一致性,如圖14。選用U型刀片,刀片固定板與刀片焊接,參照文獻[15-19]的方法,將刀片固定板固定在搖桿上(圖15)。

1,搖桿軸;2,刀片;3,齒輪;4,驅動軸;5,驅動軸固定座;6,搖桿;7,曲柄;8,連桿。1, Rocker shaft; 2, Blade; 3, Gear; 4, Drive shaft; 5, Drive shaft fixing seat; 6, Rocker; 7, Crank; 8, Connecting rod.圖14 切刀連桿組件Fig.14 Cutter connecting rod assembly

圖15 切刀與彎板焊接示意圖Fig.15 Schematic diagram of welding of cutter and bent plate
3.2 大蒜切根裝置整機結構設計
大蒜切根設備可分為4大部分:大蒜輸送機構、大蒜壓緊機構、大蒜切根機構和整機控制部分。控制部分協調前3部分機構完成設備整機的正常運轉。
大蒜切根裝置設計三維圖如圖16,大蒜輸送機構采用鏈傳動,大蒜放置板組件兩端分別固定在兩組鏈條上跟隨鏈條共同運動。大蒜壓緊機構由4個下壓組件組成,并由壓緊氣缸驅動實現下壓組件上下運動。
大蒜切根機構整機工作流程如下:裝置通電后,電源指示燈亮,并確保設備工作正常。按下復位按鈕,由接近開關1判斷大蒜切根機構是否復位,由接近開關2判斷大蒜輸送機構是否復位,并由PLC控制完成裝置復位工作,如圖17。按下啟動按鈕,通過人工上料的方式將大蒜放置在大蒜放置板組件上;輸送線電機工作,當接近開關2檢測到大蒜放置板組件時,輸送線電機停止工作,壓緊氣缸下壓,切根電機驅動大蒜切根機構進行切根動作;大蒜切根機構回位后,大蒜壓緊機構回位,輸送線電機工作;循環上述動作,進行連續切根作業。

1,壓緊機構;2,切根刀片;3,切根搖桿;4,切根連桿;5,接近開關1;6,接近開關2。1, Compaction mechanism; 2, Root cutting blade; 3, Root cutting rocker; 4, Root cutting connecting rod; 5, Proximity switch 1; 6,Proximity switch 2.圖17 接近開關位置示意圖Fig.17 Diagram of proximity switch position
4 切根試驗結果
根據第3節的結構設計,研制大蒜切根裝置整機,如圖18。進行大蒜切根試驗以獲取大蒜切根機的最佳運行參數。本研究選擇大蒜切根機的輸送線速度和切根機構速度作為試驗因素,以切根成功率、蒜肉損失率和整機切根效率作為評價指標,設計試驗。其中,大蒜切根成功率是完成根盤切除的大蒜數量占大蒜總數量的百分比;蒜肉損失率是通過剝離切根得到根盤上的蒜肉,統計這些損失的蒜肉質量占參與試驗的大蒜蒜肉總質量的百分比;整機切根效率為單位時間內完成切根的大蒜數量。

1,大蒜放置板組件;2,輸送線鏈輪;3,輸送線張緊鏈輪;4,輸送線電機;5,壓緊氣缸;6,下壓組件;7,控制箱;8,切根位置;9,切根機構;10,切根電機。1, Garlic placement plate assembly; 2, Conveyor line sprocket; 3, Conveyor line tensioning sprocket; 4, Conveyor line motor; 5, Pressing cylinder; 6, Lower pressure assembly; 7, Control box; 8, Root cutting position; 9, Root cutting mechanism; 10, Root cutting machine.圖18 大蒜切根機整機Fig.18 Whole machine of garlic root cutting
按照試驗設計,選用山東地區切去根須后的白皮大蒜作為試驗材料,以大蒜切根機為試驗對象,在浙江理工大學農業機械裝備實驗室進行試驗,試驗結果見表2。經過試驗得到:當輸送線速度為0.15 m·s-1、切根機構速度為65 r·min-1時,切根成功率達到了86.0%,大蒜損失率為8.01%,整機切根效率可達100頭·min-1,其切根效果如圖19所示。慶華機械有限公司的大蒜凹切式切根機[20]切根成功率為85%,大蒜損失率為10%,切根效率約90頭·min-1;董大義等[21]設計的大蒜鉆削式切根機切根成功率可達90%,大蒜損失率為11%,切根效率約60頭·min-1。綜合分析可知,本文提出的大蒜切根機構達到了目前行業較高的切根水準和切根效率,也具有較低的蒜肉損失率,具有較大的優勢。

表2 大蒜切根試驗結果

圖19 大蒜切根效果Fig.19 Garlic root cutting result
5 結論
測量統計了大蒜的尺寸,包括大蒜高度、大蒜直徑等基本外觀尺寸,根據所得的大蒜根盤類圓錐形外觀特征確定了交叉咬合式的仿形切根方式,據此提出了本文的大蒜精確切根機構。建立大蒜切根機構運動學模型,并基于Matlab軟件開發了大蒜切根機構的分析設計軟件,分析了機構各參數對切根軌跡的影響,為后續參數優化提供了初始解。基于大蒜根盤特征,以大蒜損失量最小為目標,建立大蒜切根機構的參數優化模型,優化得到最佳參數,優化軌跡與根盤特征基本一致,滿足大蒜切根最佳軌跡要求。根據大蒜切根機構最優參數研制了大蒜切根機構與切根裝置整機,在輸送線速度為0.15 m·s-1、切根電機轉速為65 r·min-1時,大蒜切根成功率達86.0%,大蒜損失率為8.01%,切根效率可達100頭·min-1,切根效果好、效率高。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45