新型動態簇非平穩MIMO信道模型與信道特性分析
2021-11-30 04:23:42紀汪勇張治中鄧炳光
電訊技術 2021年11期
關鍵詞:模型
紀汪勇,張治中,鄧炳光
(重慶郵電大學 通信與信息工程學院,重慶 400065)
0 引 言
移動-移動場景通信在多跳自組網、車輛通信系統、無人機通信系統中得到了廣泛的應用[1-2]。當前第五代無線通信系統(5G) 移動-移動場景信道建模工作中引入了多輸入多輸出(Multiple-Input Multiple-Output,MIMO)技術,該技術能夠顯著提高通信系統的容量和效率[3],因此,采用MIMO技術的移動-移動場景通信系統逐漸成為研究熱點[4]。同時,移動-移動場景通信系統中,移動發射機(Mobile Transmitter,MT)和移動接收機(Mobile Receiver,MR)都是運動的狀態,因此,隨著信道的環境不斷變化,信道呈現非平穩特性[5]。為了有效地設計和優化移動-移動場景的通信系統,對通信系統的物理層建立準確可靠的信道模型至關重要。
早期的信道建模工作中通常假設信道滿足廣義平穩條件,當前,該類信道模型的研究比較成熟[6]。隨著對新型移動-移動場景的信道測量研究發現,由于收發端的運動,散射體可能新生或消亡,多普勒頻譜、路徑時延、路徑功率等呈現出非平穩時變特性[7-8]。文獻[9]中提出了基于WINNER II單簇鏈路的時間演進信道模型,該模型將信道劃分為幾個獨立的時間段,每個段采用WINNER II模型,但該模型建模較為復雜,且容易造成小尺度參數取值不連續。文獻[10]中提出的非平穩通道模型應用了多天線,作者假設基于不同延遲的散射體簇和信道狀態分布在多個圓柱上,通過追蹤MT或MR的瞬時位置來更新,但該模型忽視了對簇的運動狀態進行模擬。文獻[11-12]中采用二維雙簇鏈路,考慮了多反射散射體,但該模型忽視了單簇鏈路的影響。文獻[13-15]中提出了基于無人機場景3D非平穩信道隨機模型,但移動端速度都為固定的,不適用真實環境。文獻[16]中將散射體的分布假設為兩個規則的圓環并隨收發端一起移動,同時用高斯-馬爾科夫過程進行模擬,雖然較好地解決了收發端速度的任意性,但推導過程較為復雜。文獻[17-18]中對3D非平穩移動信道進行建模,但該建模方法僅考慮信道時間域上的非平穩特性,忽視了陣列域非平穩特性影響。
本文在以往研究的基礎上,提出了一種新型三維動態簇非平穩MIMO信道模型。該模型不僅結合了單簇-雙簇-三簇鏈路,還模擬了收發端、散射體簇任意方向運動狀態,將多種簇狀態模型較好地融合;此外,采用馬爾科夫生滅過程對陣列-時間域進行簇演進,提出了一種信道參數演進算法,并將該算法運用到動態簇信道建模中。
1 動態簇信道模型與信道特性分析
1.1 信道沖激響應
根據移動-移動場景的信道狀態,在文獻[9-15]基礎上,提出了新型動態簇非平穩MIMO信道模型,這里采用雙球幾何模型來模擬該信道場景。如圖1所示,MT和MR的天線陣列均為均勻線性陣列,MT第s根天線和MR第u根天線的三維位置坐標分別為dT,u和dR,u。圖1中包括視距(Line-of-Sight,LOS)與非視距(Non-Line-of-Sight,NLOS)兩部分,收發端間存在若干有效散射體;視距離開角的方位角為φT,LOS(t),離開角的俯仰角為θT,LOS(t),到達角的方位角為φR,LOS(t),到達角的俯仰角為θR,LOS(t)。同理,非視距動態簇鏈路的角度參數表示類似,在本圖中未給出。在t時刻,MT、MR用vT(t)、vR(t)表示,各自的移動方向分別用俯仰角和同位角表示為θT(t)、φT(t)、θR(t)和φR(t)。
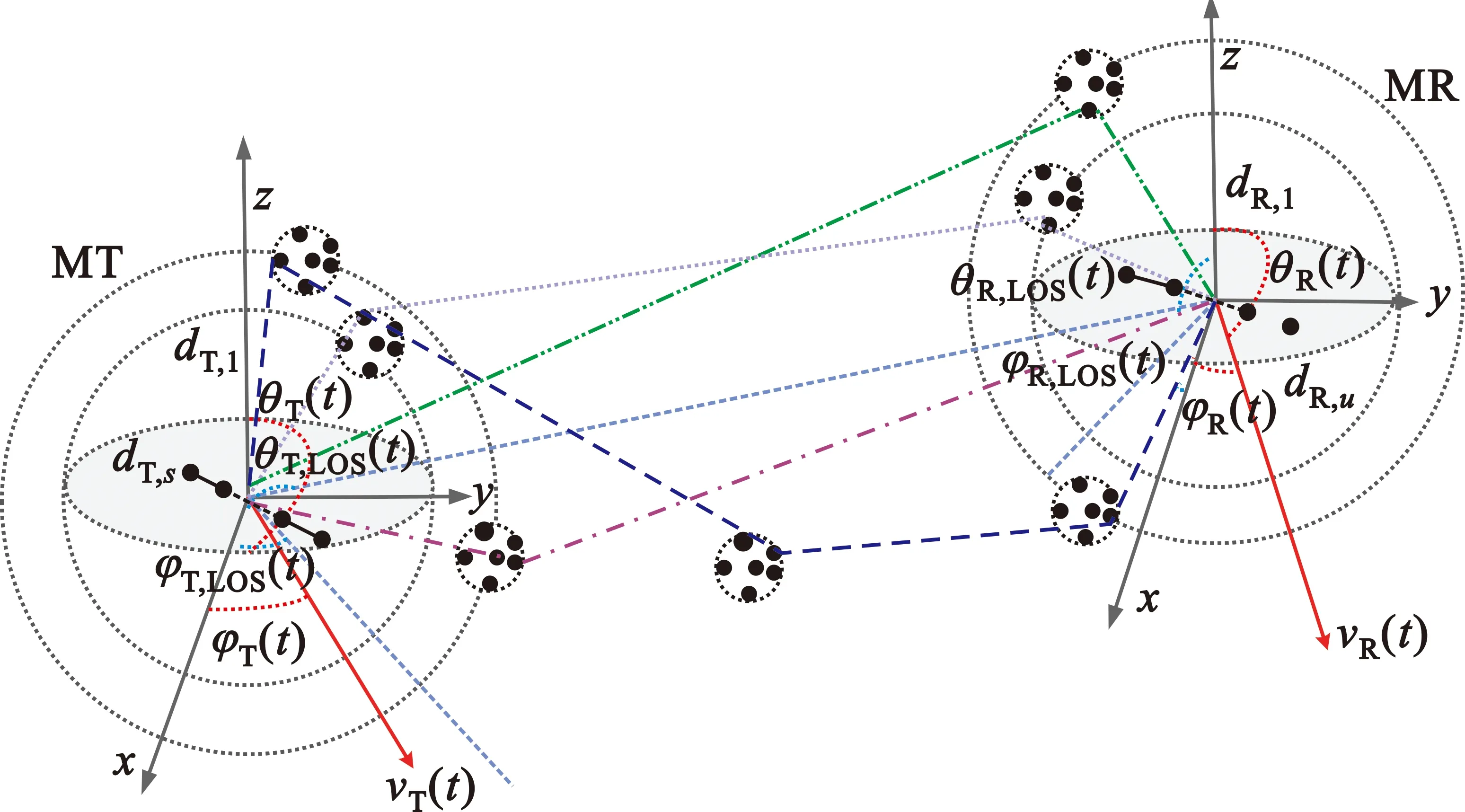
圖1 M2M場景非平穩MIMO通信系統
移動發送端和移動接收端之間的小尺度衰落信道可以用一個復雜的矩陣hs,u(t)表示,其表示發送端第s根天線與接收端第u根天線之間的沖激響應,可由LOS分量與若干個NLOS分量之和表示:

(1)
對于收發端的視距分量可以進一步表示為

fT,LOS(t)exp(jφLOS),

φLOS為視距隨機初始相位。這里k=2πf/c,c為光速,f為載波頻率。收發端天線坐標旋轉矢量為

sinθT/R,LOS(t)sinφT/RLOS(t),
cosθT/R,LOS(t)],
速度矢量為
ST/R(t)=[sinθT/R,vt)cosφT/R,v(t),
sinθT/R,v(t)sinφT/R,v(t),cosθT/R,v(t)]T。
同理,收發端非視距分量可以進一步表示為
非視距時變相對偏移相位
非視距分量下單簇態多普勒相位偏移

同理,雙簇態多普勒相位偏移

SC,T/R,2,n(t′))vC,T/R,2,n(t′)dt′),
三簇態多普勒相位偏移

SC,T/R,3,n(t′)-SC,3,n(t))vC,T/R,3,n(t′)dt′),

1.2 信道參數演進流程
為了描述所提出的改進模型在移動-移動場景中的非平穩特性,本文在文獻[16]的基礎上提出了一種基于陣列-時間信道參數演進算法,算法描述如下:
/*總時間time,LT,LR分別為天線數量,NT,1(t0),NR,1(t0)分別為收發端第一根天線初始簇數量 */;
Input time,Δt,LT,LR,NT,s(t0),NR,u(t0)
根據陣列域馬爾科夫生滅過程分別計算t時刻發送端天線s和接收端天線u的可視簇數目NT,s(t0),NR,u(t0);
使用洗牌隨機配對算法[17],在收發端簇生成公共簇,配對簇作為雙簇處理,未配對的簇作為單簇處理,對于近場的雙簇做三簇處理,在雙簇間隨機生成生成第三簇,這里用Nl(t)(l=1,2,3)表示;
/*根據時間域馬爾科夫生滅過程,對收發天線間的有效簇Nl(t)(l=1,2,3)進行時間域上的簇整體個數演進*/;
Whilet<=time do
forl=1:1:3
fori=1:1:Nl(t)
更新簇i的地理位置;
if 有新簇生成 then
if 新簇屬于Nl(t) then
隨機生成新簇位置、速度和速度方向;
計算小尺度參數;
將新簇添加到Nl(t)中;
end if;
end if;
end for;
end for;
t=t+Δt
end
1.2.1 生成簇時延
在生存間隔期間,時延參數與收發端位置以及簇位置有關,收發端的時變位置坐標表示為

單簇鏈路位置為
雙簇鏈路
DC,T/R,2,n(t)=DC,T/R,2,n(0)+
因此,視距時延
τLOS(t)=(‖DT(t)-DR(t)‖)/c,
非視距單簇和雙簇鏈路時延分別為
(2)
‖DT(t)-DC,T,2,n(t)‖+
(3)
同理,三簇鏈路的位置可以進一步表達為
(4)
因此三簇鏈路時延為
‖DT(t)-DC,T,3,n(t)‖+
‖DR(t)-DC,R,3,n(t)‖+
‖DT(t)-DC,T,3,n(t)‖+
‖DC,T,3,n(t)-DC,3,n(t)‖+
(5)
1.2.2 生成簇功率
l簇第n條NLOS路徑的功率可以通過對應的路徑延遲來計算,可得
(6)

1.2.3 生成到達離開角
文獻[18]已經證明,方位角和仰角在某些情況下是相互依賴的,并且測量數據表明Von Mise 分布能很好地模擬真實環境。為了使該模型更具有普遍性,本文模擬俯仰角θψ、方位角φZ服從Von Mise聯合分布,可得
Ωψ,m(φψ,θψ)=
(7)
1.3 信道特性
1.3.1 空時相關性
在文獻[11]的基礎上,本文對新模型時空相關函數進行了推導,可得出hs,u,n(t)與hs′,u′,n(t)信道空時相關函數為


(8)


(ρT/R,s′/u′,LOS(t+Δt)-ρT/R,s/u,LOS(t))×
(fT/R,LOS(t+Δt)-fT/R,LOS(t)),
(9)

(10)
1.3.2 空間互相關函數
將Δt=0代入式(6)空時相關函數變成空間互相關函數(Cross-correlation Function,CCF):
(11)
同時由式(7)和式(8)可得視距和非視距條件下CCF分別為
(12)
(13)
(ρT/R,s′/u′,l,n(t)-ρT/R,s/u,l,n(t))dφT/R,l,ndθT/R,l,n)。
(14)
1.3.3 時間相關性
(15)
同理,由式(7)和式(8)可得視距和非視距條件下的ACF分別為

(ρT/R,s/u,LOS(t+Δt)-ρT/R,s/u,LOS(t))×
(fT/R,LOS(t+Δt)-fT/R,LOS(t)),
(16)
(17)

(ρT/R,s/u,l,n(t+Δt)-ρT/R,s/u,l,n(t))×
(fT/R,l,n(t+Δt)-fT/R,l,n(t)))dφT/R,l,ndθT/R,l,n。
(18)
2 仿真分析
為了進一步研究陣列域和時間域信道的非平穩特性,同時驗證本文非平穩信道CCF和ACF理論表達式的正確性,本文仿真參數設置如表1所示。

表1 系統仿真參數
圖2給出了Dc分別為10、30、100和500四個場景因子下的收發端多倍波長間距下簇生存率。從圖中可以看出,場景因子越大簇生存概率越高,并且隨著收發端陣列間隔增加簇生存概率下降。
圖2 陣列域收發端生存概率
圖3和圖4是經陣列域的簇演進后,對發送端第5根天線與接收端第2根天線可視的公共簇N5,2(t)={2,4,5,6,8,9,13,17,19,21,22,24}進行時間域演進,DC=10時,分別演進收發端和簇平均速度之和為3 m/s和6 m/s簇生滅情況,結果表明,當速度增加時,生存間隔越短,生存概率越小,導致生滅過程更加頻繁。
圖3 速度3 m/s收發端簇變化
圖4 速度6 m/s收發端簇變化
設置Δt=0,CCF的絕對值表示為|ρ1,1,2,2,n(ΔT,ΔR,t)|,如圖5所示,當接收或發射側天線間距增大時,CCF的絕對值平穩下降。同時,天線間距大于0.5倍波長時,CCF的絕對值將近為零,這一發現與以往結果較為吻合。

圖5 Δt=0時非平穩信道模型CCF的絕對值
設置Δt=0和ΔR=0,CCF的絕對值|ρ1,1,2,2,n(ΔT,0,t)|如圖6所示。從圖中可以看出,在不同的時刻波形較為接近。圖6還給出了t=0 s和t=5 s時,動態簇模型的理論值與仿真值,從圖中可以看出理論值與仿真值擬合度較高,驗證了推導CCF的正確性。同時,在未考慮陣列域天線切換情況下,相關函數波動幾乎為零,這一情況說明了未考慮陣列間非平穩特性的CCF正確性。
圖6 Δt=0、ΔR=0 CCF的絕對值
設置Δr=0,ACF的絕對值|ρ1,1,n(Δt,t)|如圖7所示。當時間間隔增大時,ACF的絕對值平穩下降;當t增大時,ACF的絕對值變化加快。這一現象是由多普勒頻移造成的,時間越大,在加速情況下速度越大,多普勒偏移越大,這一現象與真實場景較為接近。
圖7 Δr=0時ACF的絕對值
在文獻[9-15]單簇或者雙簇模型的基礎上,設置Δr=0,ACF的絕對值|ρ1,1,n(Δt,t)|,圖8給出了t=3 s和t=7 s單簇、雙簇和動態簇模型理論值與仿真值。動態簇模型的ACF曲線與單簇或雙簇模型的ACF曲線非常接近,而且還彌補了只考慮單簇群或雙簇鏈路的局限性。這表明動態簇模型可以替代單簇或雙簇模型,而且理論值與仿真值擬合度較高,驗證了推導的ACF的正確性。
3 結束語
本文基于移動-移動場景對載波為6 GHz的MIMO系統提出了一種新型三維動態簇非平穩MIMO信道模型。該模型不僅對陣列域和時間域上的非平穩特性運用馬爾科夫生滅過程進行模擬,同時采用動態簇鏈路,在此基礎上提出了一種信道參數演進算法。仿真結果表明,仿真模型的信道特性與理論模型一致,可以作為移動-移動場景的信道模型參考方案。由于移動-移動場景信道變化的復雜性,提出的信道模型的某些參數還需要通過相關的信道測量值進行進一步驗證,這將是我們接下來的研究工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19