機器人裝配作業軌跡規劃研究 Research on Trajectory Planning of Robot Assembly Operation
2021-11-30 17:42:22王小闖WANGXiao-chuang徐達XUDa王兆陽WANGZhao-yang
內燃機與配件 2021年22期
王小闖 WANG Xiao-chuang 徐達 XU Da 王兆陽 WANG Zhao-yang








摘要: 隨著智能化、無人化技術的發展,機器人自主裝配將成為工業生產自動化、無人化主要發展方向。針對采用機器人完成內燃機配件自動裝配問題,依托Matlab/Adams聯合仿真對工作路徑進行軌跡規劃仿真。建立裝配機器人運動學模型,并對裝配路徑進行軌跡規劃,利用Matlab/Adams聯合仿真驗證運動學模型的可行性,仿真結果表明裝配機器人所規劃的軌跡運動學和動力學特性良好,能夠很好的按規劃的路徑完成裝配作業,為內燃機配件裝配實現無人化作業提供借鑒。
Abstract: With the development of intelligent and unmanned technology, autonomous assembly of robots will become the main development direction of industrial production automation and unmanned. Aiming at the problem of using robots to complete the automatic assembly of internal combustion engine parts, relying on Matlab/Adams co-simulation to simulate the trajectory planning of the working path. Establish a kinematic model of the assembly robot, and plan the trajectory of the assembly path, using Matlab/Adams co-simulation to verify the feasibility of the kinematics model. The simulation results show that the planned trajectory of the assembly robot has good kinematics and dynamics characteristics, and can complete the assembly work well according to the planned path, which provides reference for the realization of unmanned operation in the assembly of internal combustion engine parts.
關鍵詞: 裝配機器人;Matlab/adams;聯合仿真;軌跡規劃
Key words: assembly robot;Matlab/adams;co-simulation;trajectory planning
中圖分類號:TP242? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ?文章編號:1674-957X(2021)22-0213-03
0? 引言
隨著智能化、無人化技術的發展,機器人在自動化工業生產中的廣泛應用,使用機器人完成內燃機配件的裝配工作已經成為主要發展趨勢[1]。為完成自動裝配作業,通常對裝配機器人進行軌跡規劃,并對規劃的軌跡進行驗證,得出符合實際條件的工作路徑。因此,在Matlab計算關節運動軌跡曲線并在Adams中建立模型,通過Matlab和Adams聯合仿真,驗證運動軌跡的可行性[2],表明裝配機器人能夠可靠的完成規劃的裝配作業任務。
1? 機器人裝配作業軌跡規劃
裝配機器人軌跡規劃是指機器人在運動學、動力學基礎上的軌跡生成方法[3],是在給定的限制下,由關于時間的足夠平滑的函數構成軌跡函數實現軌跡規劃。較為常用的是五次多項式軌跡規劃[4],其關節角度曲線變化平緩,速度曲線也比較順滑,加速度也不存在跳變的情況。其函數表達式為:
θ(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5(1)
其約束條件為:
(2)
將式(2)代入式(1)中,得到五次多項式系數的表達式:
(3)
其中t0為起始時間,θ0為關節初始角度值,tm為終止時間,θm為終止位置的關節角度值。
給定各關節的初始和終止角度值和角加速度,將己知條件代入公式(3)中求解,可解出全部未知的系數,得到機器人的關節軌跡規劃函數。
2? 裝配機器人Matlab和Adams聯合仿真
Matlab和Adams聯合仿真是在Matlab中根據裝配機器人的工作路徑進行軌跡規劃,在adams中輸入關節軌跡函數作為驅動,通過Adams中的機械系統導出功能將動力學模型與Matlab中的simulink控制模塊組合起來,實現聯合仿真[5]。
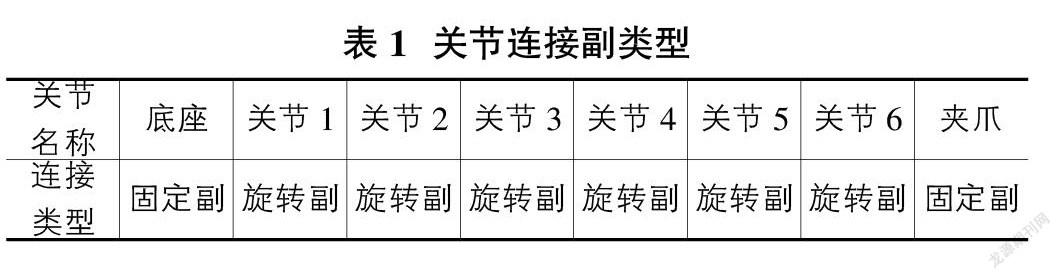
以工業內燃機中零部件的裝配作業為例,將配件從抓取位置P0移動至裝配位置Pf,完成部件的取送。首先在Adams中建立裝配機器人模型,在此選擇用solidworks三維建模而后將模型導入Adams中,定義相應的關節連接和驅動,關節副類型如表1所示,裝配機器人模型如圖1所示。
抓取位P0和裝配位Pf的關節角位移值如表2所示。
因內燃機配件裝配必須保證精準可靠,裝配過程中應盡量保持機器人運行平穩無速度突變,故關節驅動使用step5函數[6]。仿真時間設置為10s,設置好關節驅動及輸入輸出變量后,從Adams controls中導出M文件,如圖2所示。
在Matlab中運行生成的M文件并運行仿真,彈出simulink仿真模塊。由于在Adams中已設置關節驅動函數,在此不再做過多輸入控制。控制電路模型如圖3所示。
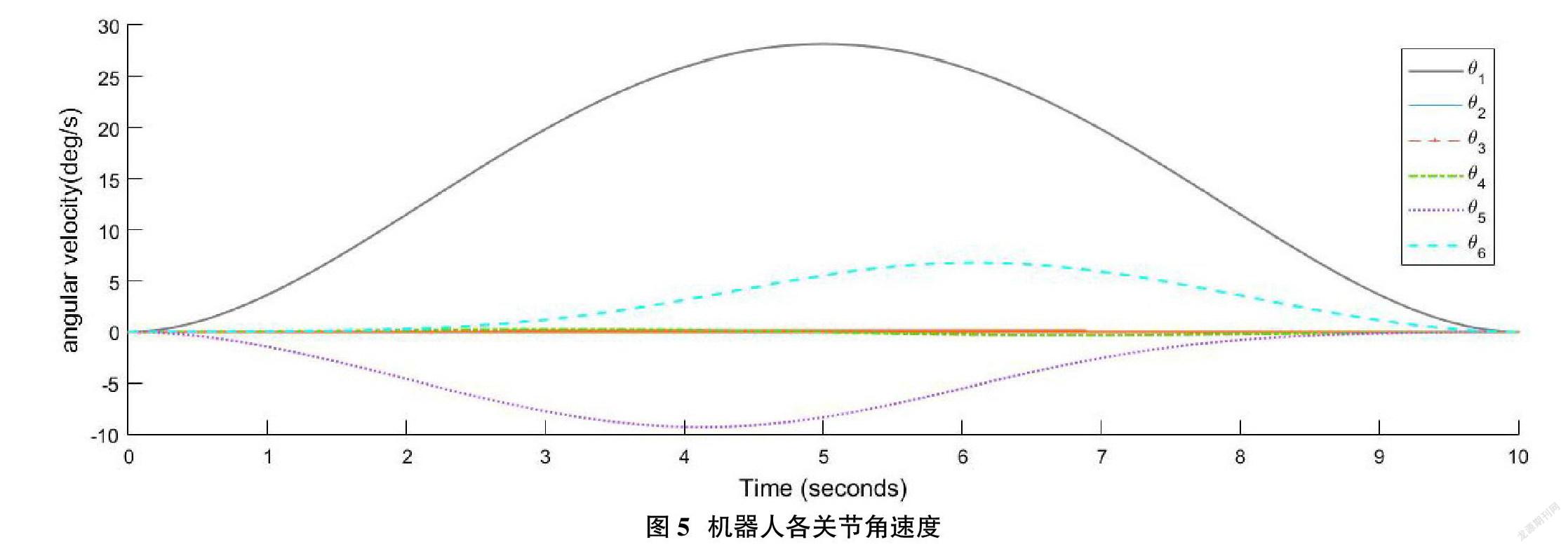
啟動simulink仿真,此時Adams也會伴隨啟動,完成聯合仿真后系統輸出關節角位移、角速度和角加速度曲線,如圖4-圖6所示。
根據仿真結果,關節角度和角加速度變化平緩,無明顯突變,說明裝配過程配件運行平穩,能夠準確到達裝配位置,如圖4和圖5所示;聯合仿真中關節加速度出現跳變的情況,說明關節運動過程中受阻力影響,符合實際運動情況,對裝配作業影響不大,如圖6所示。綜上可知,Matlab和Adams聯合仿真能夠很好的展現裝配機器人在內燃機配件裝配作業中的運行情況,驗證了裝配機器人能夠按規劃的軌跡完成裝配作業。
3? 小結
針對裝配機器人實現內燃機配件自動裝配問題,進行了裝配機器人軌跡規劃,通過Matlab和Adams聯合仿真,結果較好的反映了系統的軌跡控制和動態特性,驗證了裝配機器人完成裝配工作的可行性。通過軌跡規劃仿真,在無人化裝配作業中,給定配件的初始位置和終止位置,就可以精確完成配件裝配工作,為內燃機配件裝配實現無人化作業提供借鑒。
參考文獻:
[1]羅建華,徐達.基于虛擬樣機的裝填機械臂動力學分析與仿真[J].裝甲兵工程學院學報,2015,29(03):71-74.
[2]孫偉,王方成,張東生,王占領.基于ADAMS和MATLAB的翻轉機構聯合仿真研究[J].機械工程師,2017(04):18-21.
[3]田國富,姜春旭.工業機器人在MATLAB-Robotics中的運動學分析[J].重型機械,2019(03):73-77.
[4]李黎,尚俊云,馮艷麗,淮亞文.關節型工業機器人軌跡規劃研究綜述[J].計算機工程與應用,2018,54(05):36-50.
[5]葉仁平,曾德懷.基于Adams和Matlab的機器人手臂運動控制聯合仿真研究[J].現代制造工程,2017(06):56-61,68.
[6]沈悅.六自由度工業機器人軌跡規劃及控制算法研究[D].南京理工大學,2017.
- 內燃機與配件的其它文章
- VR在“1+X”工業機器人操作與運維培訓中的應用 Application of VR in Operation and Maintenance Training of "1+X" Industrial Robot
- 《工業機器人操作與編程》項目化教學設計 Project Teaching Design of Industrial Robot Operation and Programming
- 船舶輪機系統虛擬仿真實驗平臺建設 Construction of Virtual Simulation Experiment Platform for Marine Engineering System
- 探析機械零件數控車削加工理實一體化課程開發 Development of the Integrated Course of NC Turning of Mechanical Parts
- 汽車檢修實訓臺架與教學任務匹配研究 Study on Matching of Automobile Maintenance Training Platform and Teaching Task
- 汽車運用與維修專業現代學徒制崗位職業能力探析 An Analysis of Vocational Ability of Modern Apprenticeship in Automobile Application and Maintenance