男性青年不同坡角斜面行走的步態特征研究
2021-12-03 01:54:16楊子涵劉卉蔣量王立端萬祥林曲峰
天津體育學院學報 2021年6期
楊子涵,劉卉,蔣量,王立端,萬祥林,曲峰
在日常生活(步道、樓房出入口、過街天橋)和體育休閑中,常常需要面對不同斜坡環境。斜坡坡角的改變將導致重力相對行走表面方向改變,這種變化對步態有顯著影響[1]。研究指出,當行人上下斜坡時,跌倒風險隨之增加[2]。一般來說,城市中較陡的路面降低了人的行走意愿[3]。日常生活中斜坡的普遍存在且影響不一,因此了解步態為適應斜坡行走所做的改變是十分重要的。
目前,國外對斜坡行走的步態分析包括時空參數分 析[4-13]、運 動學 分 析[4,6-7,10-11,13-14]、動 力 學 分 析[7,10,15-17]和適配的假肢矯形器設計[18],國內在斜坡對步態影響的研究近年來剛剛開始[19-22]。一般認為,在上坡行走時為了提高重心,支撐腿需要產生更大的踝關節趾屈力矩和伸髖力矩[7-8];下坡時則更注重控制行走時身體的持續加速[23],同時要求更大的伸膝力矩及踝關節運動幅度[7]。這些特點對于肌力減少的人群,如老年人和行動受限人群會更加明顯[8,18,24]。目前,許多斜坡步態的研究通過跑步機來進行,這種固定步行速度方法的研究在動力學方面與真實環境中的研究存在差異[25]。通過有限的基于自選步速的斜坡研究得出的步速步長變化規律并不一致,共有4種不同類型[5-8]。有研究進一步指出,在斜坡步態研究中,對于通過自選步速在斜坡上行走產生的步態改變還沒有得到充分研究[6],如以自選速度在大坡角范圍內行走的步態改變及控制策略的改變起始坡角。
因此,本研究通過探討3種坡角斜坡以自選速度上下行走時的步態,并與平地行走對比,旨在評估坡角對男性青年行走時下肢關節角度力矩的影響,并進一步分析不同斜坡對行走步態控制策略的改變。本研究假設不同坡角會對上下坡行走與平地行走之間的控制策略即關節角度力矩造成顯著改變,同時假設這個改變產生于±6°。本研究將為坡面行走步態特征的相關基礎研究和斜坡行走康復訓練、運動鞋及矯形器具設計、機器人設計等提供相關參考。
1 研究對象與方法
1.1 受試者
受試者為10名男性青年,年齡(23.7±1.1)歲,體重(67.5±5.0)kg,身高(174.8±4.55)cm,身體健康,無上下肢神經及肌肉損傷病史,慣用腳均為右腳。
1.2 試驗方法
測試斜坡環境由鋁型材搭建,步道表面鋪有木板供行走,測力臺水平安裝于3.2 m長的步道中央,并與周圍木板有5 mm間隔[26]。斜坡角度調整裝置位于步道一端,角度調整精度為±0.5°。每位受試者在接觸測力臺前后至少有2個單步,測試的4個坡角選擇(0°,6°,12°,20°)參考前人研究[7,10,17,27]。受試者身著泳褲,根據H.HAYES模型在身上粘貼29個反光標志點[28]。試驗開始前,要求受試者先在平地上以個人習慣步速行走5次,并告訴受試者在接下來的斜坡上行走時盡量保持該速度,在4個坡角中隨機選擇一個坡角作為起始測試坡角,并先在該斜坡坡角上下行走5次用以習慣該坡角。正式試驗時通過8臺紅外動作捕捉鏡頭(Motion Analysis Raptor-4,USA,200 Hz)和1塊測力臺(Kistler 9281CA,Switzerland,1 000 Hz)配合Motion Analysis自 帶 軟 件Cortex(version 2.6,Motion Analysis Corporation,Santa Rosa,CA)同步采集運動學及動力學數據。以右腳完全踩到測力臺記為1次成功行走,在記錄3次成功行走數據后,受試者休息5 min從而消除自適應以及肌肉疲勞對結果的影響并準備下一次測試。
1.3 數據處理
采 用MATLAB R2016a(The MathWorks Inc.,USA)進行,運動學和動力學數據均采用4階Butterworth低通濾波法進行平滑,截斷頻率分別為8 Hz和15 Hz[15]。每個坡角下,測力臺都通過Cortex軟件進行數字化并將測力臺的反作用力轉換在大地坐標系表示。轉換后的測力臺力值數據通過逆動力學方法計算下肢關節三維凈力矩,步態周期的定義為單側足跟著地時刻到同側足跟再次著地,步態周期中的足跟著地及趾離地時刻通過斜坡測力臺力值大于10 N的條件標記,足跟再次著地時刻通過觀察標記[7]。
在1個步態周期中,支撐相擺動相中不同時期的劃分標準參照前人研究[29],對慣用腿側下肢的髖膝踝3個關節的角度-時間及力矩-時間變化曲線都選取幾個特征時刻(見表1)進行統計分析。
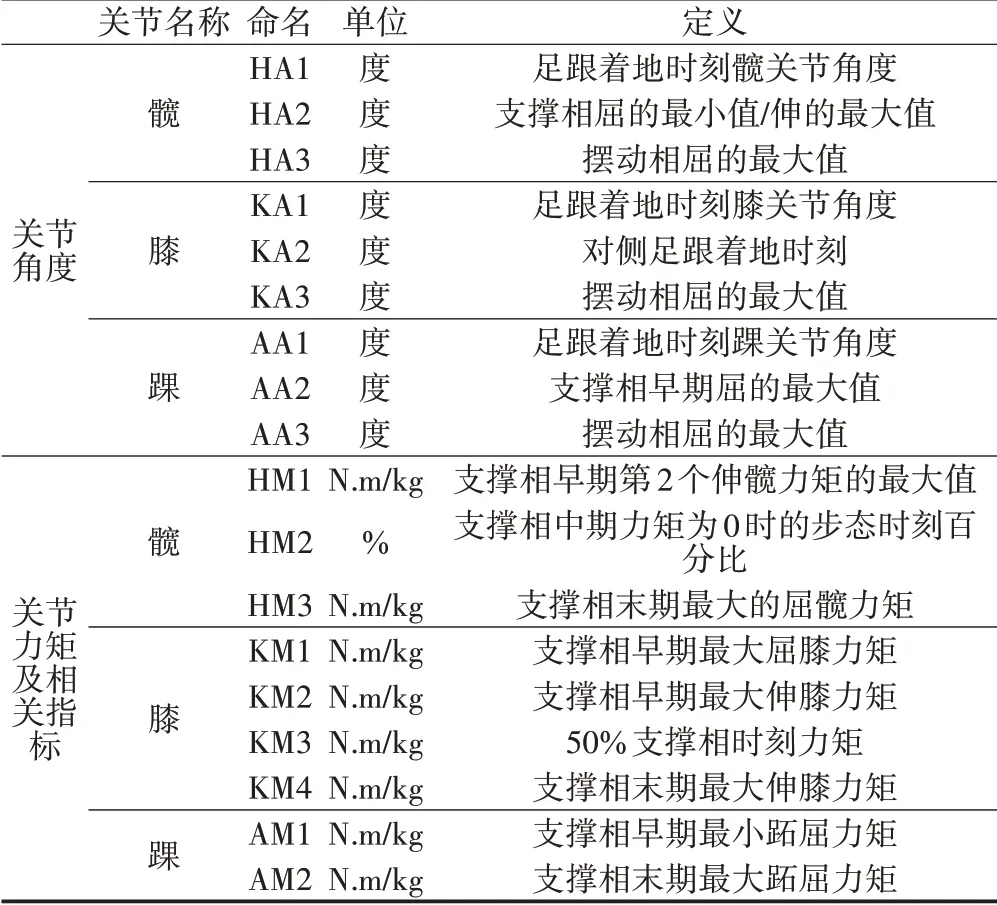
表1 髖膝踝特征時刻的命名與定義Table1 Naming and Definition of Points of Interest from Kinematic and Kinetic Data of Hip,Knee and Ankle
每個受試者的每次步行中,將之前所得到的下肢三關節角度-時間變化曲線和力矩-時間變化曲線中都以右足跟首次觸地(踏上測力臺)表示1個步態周期開始時刻,以右足跟再次觸地表示1個步態周期結束。將所得到的完整步態階段通過Origin軟件進行標準化。將X軸坐標0時表示右足跟觸地時刻,60表示右足尖離地時刻,100表示右足跟再次著地時刻,進行插值。其中,角度-時間變化曲線正值為屈,負值為伸(踝關節正值為跖屈,負值為背屈),力矩-時間變化曲線正值為伸,負值為屈(踝關節正值為跖屈,負值為背屈)。在每個步態周期中都選取一定數量的關鍵點來標注特征時刻進行統計分析。
1.4 統計分析
應用SAS9.4(SAS Institute Inc.,USA)統計軟件對不同坡角下(-20°、-12°、-6°、0°、6°、12°與20°)各步速、步頻、步長及下肢各關節各特征時刻結果分別進行單因素重復測量方差分析,顯著性水平定義為0.05。當不同坡角對結果影響顯著時,后繼檢驗采用Dunnett方法比較不同坡角與0°結果的顯著性,顯著性水平定義為0.05。
2 結果
不同坡角條件下步速、步頻、步長結果顯示,坡角的 改 變 對 步速[F(6,54)=15.84,P<0.001]、步 頻[F(6,54)=23.72,P<0.001]和步長[F(6,54)=14.74,P<0.001]有顯著影響。后繼檢驗顯示,與0°坡角相比,當坡角≥12°及坡角為-20°時,步速顯著減少;當坡角=20°時,步頻顯著減少;當坡角≥-12°時,步頻顯著增大;當坡角大于或±12°時,步長顯著減少(見圖1)。
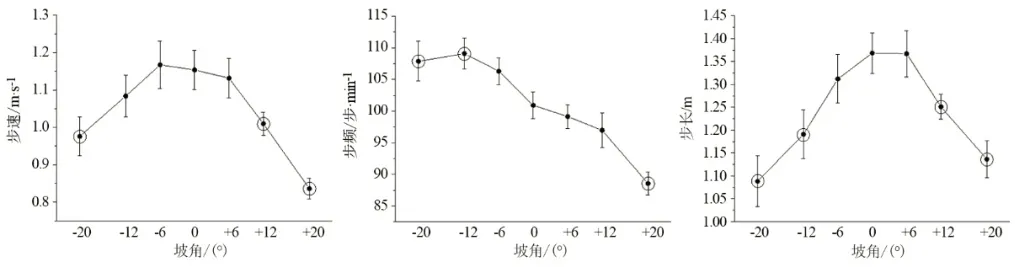
圖1 不同坡角下的步速、步頻、步長結果(M±SD)Figure1 Mean(SD)of the Gait Spatiotemporal Parameters for Each Grade
不同坡角條件下上坡行走及下坡行走的下肢髖膝踝角度及標準化力矩趨勢在單個步態周期中的結果見圖2,關節角度及力矩特征時刻值結果見表2。
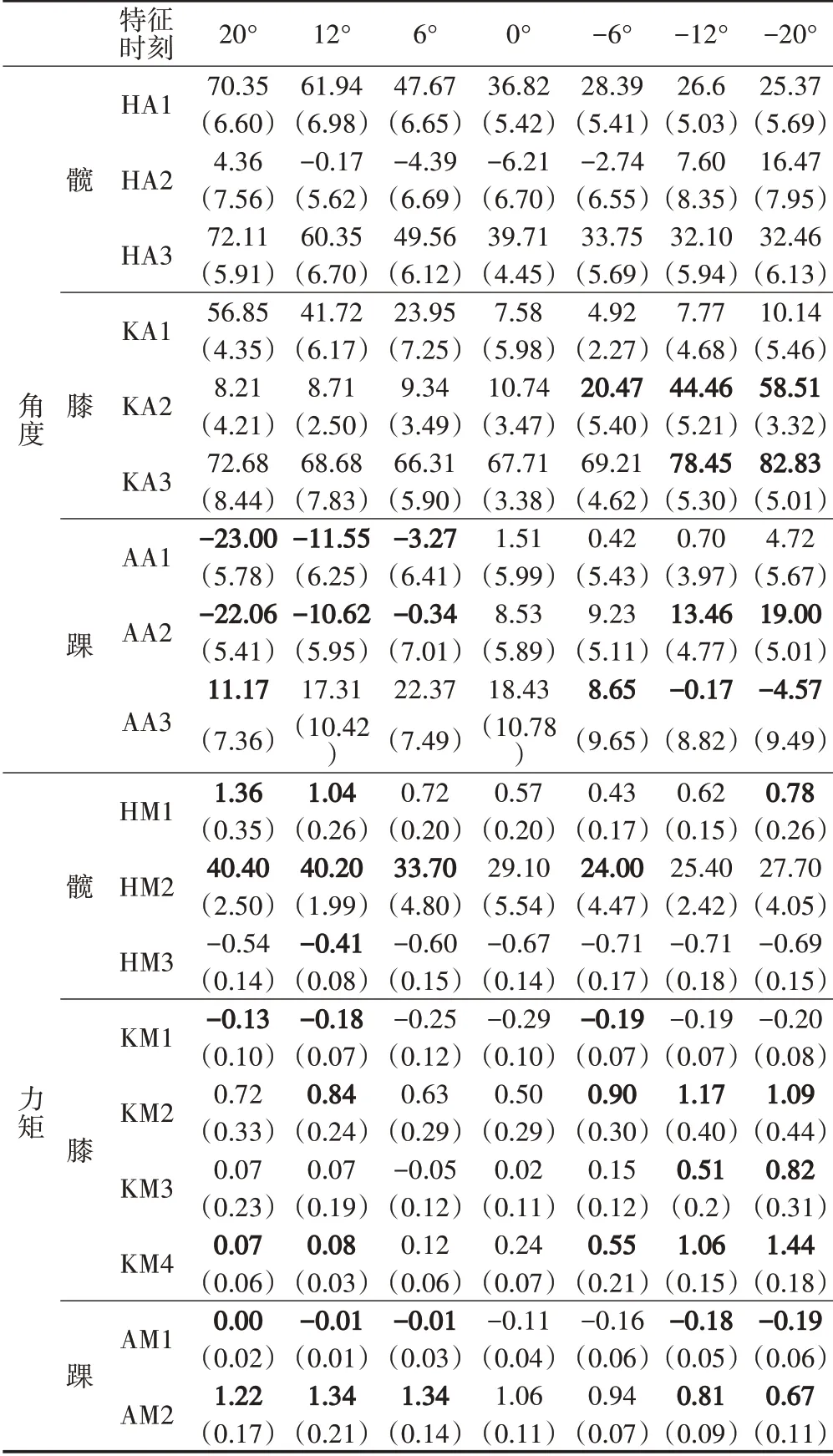
表2 下肢關節角度及力矩特征時刻結果(M±SD)Table2 Mean(SD)of the Joint Kinematic and Kinetic Points of Interest for Each Grade
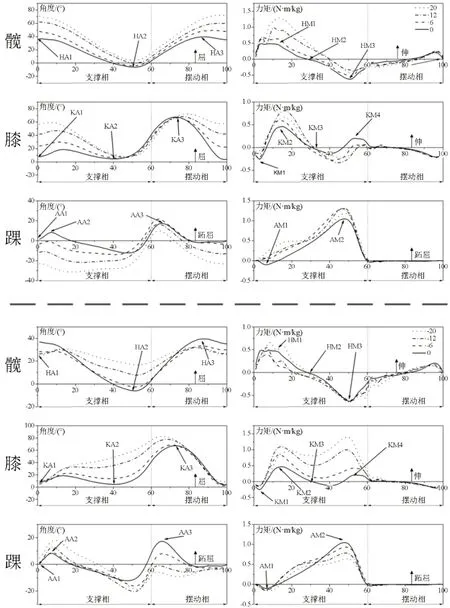
圖2 不同坡角下肢髖膝踝角度及標準化力矩在1個步態周期中的變化Figure2 Sagittal Joint Angles and Normalized Moments as a Function of the Gait Cycle
(1)髖關節角度、力矩特征時刻結果。坡角的改變對髖關節角度特征時刻各結果有顯著影響,具體為足跟著地時刻髖關節角度(HA1):F(6,54)=387.98,P<0.00;支撐相屈的最小值/伸的最大值(HA2):F(6,54)=39.00,P<0.001;擺動相屈的最大值(HA3):F(6,54)=319.16,P<0.001。坡角的改變對髖關節力矩特征時刻各結果有顯著影響,具體為支撐相早期第2個伸髖力矩的最大值(HM1):F(6,54)=26.65,P<0.001;支撐相中期 力 矩 為0時 的 步 態時 刻 百分 比(HM2):F(6,54)=44.78,P<0.001;支撐相末期最大的屈髖力矩(HM3):F(6,54)=9.07,P<0.001。
(2)膝關節角度、力矩特征時刻結果。坡角的改變對膝關節角度特征時刻各結果有顯著影響,具體為足跟著地時刻膝關節角度(KA1):F(6,54)=207.69,P<0.001;對側足跟著地時刻(KA2):F(6,54)=267.29,P<0.001;擺 動 相 屈 的 最 大 值(HA3:F(6,54)=21.33,P<0.001。坡角的改變對膝關節力矩特征時刻各結果有顯著影響,具體為支撐相早期最大屈膝力矩(KM1):F(6,54)=387.98,P<0.05;支 撐 相 早 期 最 大 伸 膝 力 矩(KM2):F(6,54)=7.83,P<0.001;50%支撐相時刻力矩(KM3):F(6,54)=35.74,P<0.001;支撐相末期最大伸膝力矩(KM4):F(6,54)=210.80,P<0.001。
(3)踝關節角度、力矩特征時刻結果。坡角的改變對踝關節角度特征時刻各結果有顯著影響,具體為足跟著地時刻踝關節角度(AA1):F(6,54)=79.96,P<0.001;支撐相早期屈的最大值(AA2):F(6,54)=213.19,P<0.001;擺動相屈的最大值(AA3):F(6,54)=28.92,P<0.001。坡角的改變對踝關節力矩特征時刻各結果有顯著影響,具體為支撐相早期最小跖屈力矩(AM1):F(6,54)=41.70,P<0.001;支 撐 相 末 期 最 大 跖 屈 力 矩(AM2):F(6,54)=59.34,P<0.001。
3 討論
圖1顯示,步長步速在斜坡行走時隨坡角變化呈倒U型趨勢,與J.SUN等[12]在城市環境中觀測到的結果一致,但與前期依據實驗室環境得到有關自選步速的斜坡步態測試結果不一致。不一致表現為步長及步速增加[8]、無改變[7]、減少[6,9,12]和上下坡之間趨勢不同[5,10]。研究結果的差異性可能是由測試環境的不同造成的,如跑步機或搭建含測力臺步道的使用,斜坡的坡角大小及測量范圍、斜坡的長度和寬度、扶手使用與否和摩擦系數大小等。本研究與J.SUN等[12]通過影像記錄的2 400名城市行人的步態時空參數規律一致,這增加了本研究結果的代表性。
3.1 上坡行走
人體在上坡行走時,下肢角度及力矩變化趨勢顯示(見圖2),著地時刻下肢髖(HA1)膝(KA1)踝(AA1)角度隨坡角增大而增大,支撐相早期踝關節跖屈的最大值逐漸變小(AA2)轉為背屈,擺動相髖關節屈的最大值(KA3)也表現出更大的屈曲。隨著坡角增大,下肢關節屈伸幅度增大的變化是為了適應上坡而做出的相應改變,其中變化最大的是足跟著地時刻髖關節角度(HA1),從平地到20°坡角后增加了33.53°(91.1%)。平地行走時,最小跖屈力矩(AM1)一般被認為有助于足跟著地后減緩全掌著地速度,然而隨著坡面傾斜角度的增加,其由背屈逐漸變成完全的跖屈力矩。支撐相末期最大跖屈力矩(AM2)隨著坡面傾斜角度的增加而增加。AM1由背屈變為跖屈以及AM2峰值的增大說明在上坡坡角增加的情況下,需要增加踝關節跖屈力矩大小及跖屈時間百分比來保證正常步行。膝關節在支撐相早期最大屈膝力矩(KM1)隨傾斜角度增大其緩沖的作用減少。支撐相末期最大伸膝力矩(KM4)表現出因傾斜角度增大而減少了對支撐相末期伸膝的需求。髖關節支撐相早期第2個伸髖力矩的最大值(HM1)隨傾斜角度增大表現出伸髖力矩增大,表現出為了適應坡角的增大產生更大的伸髖力矩,用來彌補對側腿伸膝力矩(KM4)的減少,從而完成上坡。支撐相中期力矩為0的時刻(HM2)明顯后移,說明在支撐相中花費更多時間百分比來完成伸髖過程,結合HM1的增加與HM2的后移說明在上坡坡角增加的情況下,需要增加人體伸髖凈力矩與延長伸髖時間百分比來保證正常步行。支撐相末期最大的屈髖力矩(HM3)則隨坡角增加而增加,說明在上坡行走時支撐相末期髖關節屈力矩的減少可以幫助提高重心高度并維持正常行走,其中變化最大的是髖關節第2個伸肌力矩的最大值(HM1),從平地到20從坡角后增加了0.79 N.m/kg(138.6%)。
綜上所述,隨著坡角的增加,上坡需要增加擺動腿的屈髖屈膝,同時加強踝背屈來幫助足廓清,而支撐腿在擺動腿開始擺動時,伸膝伸髖同時踝跖屈將有助于提升人體重心高度,增大擺動半徑,從而保持步長。踝關節從單側足著地時刻開始在整個支撐相中基本都處于背屈(伸)狀態,使原本在支撐相中-末期的踝關節角度變化由背屈-跖屈逐漸過渡為跖屈,這種轉變的時間百分比隨斜坡傾斜角度的增大而愈加明顯,并伴隨跖屈力矩增加,表現為踝關節在大坡角上坡行走時將花費更多時間、做更大功來完成跖屈過程。在人體上坡行走外,除踝關節跖屈力矩外,髖關節伸髖力矩的時間百分比及峰值都有所增加,膝關節支撐相早期伸膝力矩峰值有增加的趨勢,他們共同表現出一種推進的狀態。
3.2 下坡行走
人體在下坡行走時,下肢角度及力矩變化趨勢顯示(見圖2),隨著坡角增大,著地時刻髖角著地時刻(HA1)減少,支撐相階段,足支撐相早期屈的最大值(AA2)跖屈增大,對側足跟著地時刻(KA2)膝關節屈增大,同時髖關節支撐相(HA2)屈曲增加。擺動相踝關節及膝關節屈最大值(AA3,HA3)逐漸變小,擺動相屈的最大值(KA3)逐漸變大。隨著坡角增大,膝踝關節屈伸幅度增加、髖關節屈伸幅度減少是為了適應下坡變陡而做出的相應改變,變化最大的是對側足跟著地時刻(KA2),從平地到20°坡角后增加了47.77°(444.8%)。力矩方面,下坡時更多的力矩變化產生在膝關節和踝關節,其中踝關節支撐相末期最大跖屈力矩(AM2)隨著坡面傾斜角度的增加而減少。支撐相早期最大屈膝力矩(KM1)有一定增大,表現為通過膝關節的屈曲降低重心的作用,支撐相早期最大伸膝力矩(KM2)、50%支撐相時刻力矩(KM3)隨坡角增大表現出更大的伸力矩。結合角度變化,表現為支撐相中期支撐腿主要作用是屈膝來降低重心高度,支撐相末期最大伸膝力矩(KM4)隨坡角增大表現出更大的伸力矩,原因是此時膝關節角屈曲增大,使得膝關節周圍肌肉產生更大伸膝力矩來維持軀干平衡。在下坡行走中,支撐相末期最大伸膝力矩(KM4)變化最大,從平地到20平坡角后增加了1.2 N.m/kg(500%)。
綜上所述,隨著坡角的增加在下坡時需要通過不斷屈膝以及維持髖的屈曲來控制重心的下降,同時踝關節著地時產生更多跖屈及在支撐相末期產生更大背屈趨勢來維持行走的穩定性。隨著坡角增加,原本膝關節角度變化在1個步態周期中從屈曲-伸展-屈曲變化為持續的屈曲,同時膝關節力矩也基本全部變為伸膝力矩,這種趨勢變化表現為在足跟著地后,通過控制膝關節屈曲與踝關節屈伸來降低重心維持步態。
3.3 小結
本研究通過對比人體上坡、下坡下肢關節角度力矩與平地步行時下肢關節角度力矩的峰值與特征時刻,探究不同斜坡角度對步行時下肢關節運動學與動力學的影響。首先假設不同坡角會對上下坡行走與平地行走之間的控制策略即關節角度力矩造成顯著性改變,同時假設這個改變將在±這個坡角產生。研究結果顯示,上下坡行走與平地行走之間關節角度力矩特征值及特征時刻因坡角改變而產生顯著改變,同時本研究運動學趨勢與前人研究相一致[7,10,30],動力學趨勢與部分前人研究一致[10,15,17,31]。本研究中髖關節力矩的變化趨勢及統計結果不足以支持A.N.LAY等[7]的觀點,特別是在上坡行走中,并未觀察到髖關節在支撐相末期有伸膝力矩峰值的產生。相反的是,觀察到髖屈力矩具有減少趨勢,造成這種不同趨勢的可能原因是A.N.LAY等[7]的研究中步態時空參數在各個坡角下無差異導致的。
有研究指出,步態的改變在面對斜坡坡角為10°時就已經出現[7]。另一份調查受試者上坡行走時邁上斜坡的第1步,發現產生步態改變的坡角應該介于6°~9°之間[14]。本研究結果顯示,坡角在±角在時,下肢關節角度力矩特征值及特征時刻已經出現顯著改變。結果不同的原因可能在于并未只在斜坡上行走,而是單步登上斜面。本研究結論指出,當坡角達到±坡角時,斜坡已經對下肢關節角度力矩特征值和特征時刻產生顯著影響,在未來研究中增加不同坡角對功率及下肢關節做功的影響有助于加深坡角大小對人體步態影響的了解。雖然本研究并未進行上下坡步態間的對比,但因為上坡步行與下坡步行之間角度力矩的變化趨勢及控制模式不一致,上下坡的步態控制模式變化可能始于不同的斜坡坡角。
4 結論
步長與步速在斜坡行走中隨坡角增大呈倒U型關系。上坡、下坡與平地行走之間通過不同的控制方式來進行:上坡行走主要以增加下肢關節的屈伸幅度及下肢伸力矩從而增加輸出功率的推進為主;下坡行走主要以維持髖關節屈曲的同時增加膝踝關節的屈伸幅度并增加膝關節伸力矩來降低重心,保持身體穩定性為主。人體平地行走步態在坡角達到±6°時已經產生顯著改變。