軍用混合動力系統能量管理策略研究綜述
2021-12-03 05:10:38曾繁琦袁曉靜王旭平
兵器裝備工程學報 2021年11期
曾繁琦,袁曉靜,王旭平,張 澤
(火箭軍工程大學作戰保障學院, 西安 710025)
1 引言
軍用車輛混合動力系統可以解決車載裝備電力需求問題,提高軍用車輛信息化水平及控制水平,它不僅僅是一個單純的作戰指揮平臺,即各種武器裝備的最佳承載平臺和應用載體,而且是一個能源平臺,如何對系統各部件之間的能量流動進行合理分配是能否發揮整車性能潛力的關鍵。混合動力系統能量管理策略制定是軍用混合動力車輛研究的關鍵問題之一,車輛性能在很大程度上依賴于動力源的協調控制,控制策略能否適應戰場環境下復雜的行駛工況是能否發揮混合動力系統性能優勢的關鍵。因此,設計合理的控制策略對提升軍用混合動力車輛的動力性、經濟性等性能具有重要意義。
2 能量管理策略研究現狀
作為混合動力車輛研究領域的關鍵問題之一,能量管理策略的優劣直接影響著車輛的可靠性、機動性、經濟性和排放性能[1]。目前,根據混合動力車輛控制需要,其能量管理策略可大致分為三類,如圖1所示。第一類為基于規則的能量管理策略,具體包括確定性規則能量管理策略、模糊規則能量管理策略和負載功率濾波能量管理策略;第二類為基于優化的能量管理策略,具體包括全局優化能量管理策略和瞬時優化能量管理策略;第三類為基于工況自適應的能量管理策略,它是通過現有信息對未來工況進行預測實現的[2]。
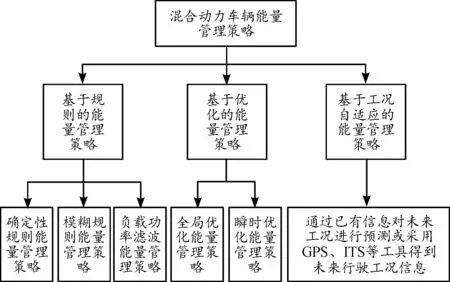
圖1 混合動力車輛能量管理策略分類框圖
2.1 基于規則的能量管理策略
基于規則的能量管理策略是根據工程經驗、數值模型、先驗知識或實驗數據等人為制定的規則對動力源進行能量分配,依據動力源的功率需求、穩態Map圖、車速、動力電池荷電狀態(state of charge,SOC)等參數設置工作模式切換條件,實現對系統能量分配方式和流向以及各部件工作狀態的控制,最大限度地保證系統各部件工作在高效區域,具有算法簡單、易于實現、實時性好的優點,因此基于規則的能量管理策略成為最早用于混合動力車輛的控制方法[1,3-4]。在基于規則的能量管理策略中,根據規則是確定或者模糊與車輛負載功率需求的關系,其可分為確定性規則能量管理策略、模糊規則能量管理策略和負載功率濾波能量管理策略[4-6]。
1) 確定性規則能量管理策略
確定性規則能量管理策略通過設定一組穩態參數限定動力源的開關與工作區域,根據設定規則完成車輛各個工作模式之間的轉換,確定動力源的轉矩分配方式,即通過電機調節發動機工作點,避免發動機怠速或低負荷運行,使得發動機盡量工作在高效區域,從而提高整車的燃油經濟性[7]。現有確定性規則能量管理策略包括單點控制策略、多點控制策略、功率跟隨控制策略、發動機最優油耗曲線控制策略、蓄電池輔助控制策略和最大電池SOC控制策略等[8-9]。
童毅等以轉矩作為主要控制變量,考慮發動機穩態效率特性、駕駛員需求轉矩以及系統部件特性,合理分配了發動機和電機的輸出轉矩,最終實現了系統效率提高的目的[10];舒紅等分析了混聯式混合動力電動汽車的工作原理,在此基礎上將車輛運行工況劃分為充電、放電和制動3種工況,選取系統效率為優化目標建立優化模型,其燃油經濟性較傳統車提高了36.95%[11];Adhikari等建立的控制規則是以功率平衡方程為基礎,控制電池SOC保持在合理范圍,保證了發動機工作在高效區域,同時避免了發動機頻繁起停。與未安裝起動/發電一體機(integrated starter generator,ISG)的混合動力系統相比,燃油消耗降低了9.3%[12];連靜等根據混合動力系統結構和動力源穩態Map圖對混合動力車輛進行工作模式劃分,采用線性約束優化方法求解不同工作模式下系統的效率,以系統效率為優化目標,得到最優效率下各參數的邏輯門限值[13];Dextreit等結合發動機穩態效率特性Map圖,將發動機工作區域分為低、中、高3種負荷區域,通過駕駛員意圖識別得到當前駕駛員需求轉矩。當駕駛員需求轉矩很小時,車輛采用電機單獨驅動的純電動模式或行車發電模式;當駕駛員需求轉矩處于發動機中負荷區域時,車輛采用發動機單獨驅動的工作模式;當駕駛員需求轉矩較大時,采用兩個動力源混合驅動,發動機處于經濟工作區域,電機提供額外轉矩。研究結果表明,與傳統車輛相比,所制定的控制規則較大程度地提高了混合動力車輛的燃油經濟性和排放性[14];Shabbir等采用動力電池輔助控制策略,綜合考慮動力電池充放電效率,通過Map圖使得混合動力車輛實時運行在高效區域,系統需求功率分配具有實時性,避免了發動機起動與停止次數增加,延長了動力電池壽命。與采用單點控制策略相比,燃油消耗降低了20%[15];周奇勛等綜合考慮發動機轉矩特性、ISG電機效率特性以及動力電池組充放電特性,優化了3個部件的工作區域,在優化后的控制規則下混合動力系統各個部件均工作在高效區域,制定的模式切換條件實現了混合動力車輛不同工作模式之間的轉換[16]。
在確定性規則能量管理策略中,邏輯門限值往往是根據研究學者的經驗和實驗數據確定的,規則簡單,計算量小,對車載控制器的處理能力要求低,工程實用性強,但對于復雜多變的行駛工況和混合動力系統的動態變化均具有較差的適應性,無法保證系統達到最優控制,車輛的燃油經濟性仍有提升的空間。為了優化確定性規則能量管理策略的性能,同時增強其工況的實時適應性,研究學者引入模糊控制理論,從而產生了模糊規則控制策略。
2) 模糊規則能量管理策略
模糊規則能量管理策略并不依賴于系統的精確模型,隸屬度函數對精確信號進行模糊化處理后形成模糊語言輸入,再根據規則庫中預先設定好的模糊規則或專家知識進行推理得到模糊結論,最后將模糊結論解模糊化為精確控制命令,協調控制混合動力系統各個部件。模糊規則能量管理策略更加適用于多變量、非線性、時變性的混合動力系統,具有較強的穩定性和魯棒性。隨著算法的不斷改進,產生了基于傳統模糊控制的改進策略,例如自適應模糊控制和預測模糊控制等策略[17]。
Cairano等對動力電池SOC和發動機轉矩分別采用模糊控制方法,保證了發動機時刻工作在效率特性Map圖上的高效區域,整車燃油經濟性和排放性能得到了提高[18];Murphey等針對混合動力系統采用分層結構,采用模糊控制方法控制發動機輸出轉矩,保持發動機高效運行,進一步提高了整車的燃油經濟性[19];Zhou等制定的模糊規則以駕駛員需求轉矩和發動機目標轉矩之差和動力電池SOC作為模糊控制器的輸入,發動機轉矩和電機轉矩作為模糊控制器的輸出,最終實現了兩個動力源轉矩的合理分配[20];Bostanian等將智能算法和模糊控制相結合,模糊規則的輸入量為車速、需求功率、動力電池SOC,輸出量為發動機輸出轉矩,為了達到改善燃油經濟性和排放性的目的,將油耗、電耗、污染物排放、轉矩差進行歸一化處理,以處理后的參數作為目標函數,采用遺傳算法優化模糊控制器中的隸屬度函數[21];Chindamo等將神經網絡引入到模糊規則能量管理策略中,通過神經網絡訓練得到的發動機功率和動力電池SOC決定是否進入充電模式,模糊規則再通過電機電流大小決定相應充電模式的持續時間。該能量管理策略應用于某型串聯式混合動力車輛,提高了燃油效率和續駛里程[22];Moghbeli等從動態規劃優化算法的優化結果中提取模糊規則,將其應用于液力混合動力車輛的系統中,根據提取的規則將系統的工作模式分為五種,整車的燃油經濟性得到改善[23];梁俊毅等采用多目標非占優排序智能優化算法優化模糊規則能量管理策略,引入三類混沌算子避免了優化算法陷入局部最優解,從而得到整車的最佳燃油消耗與排放[24]。
模糊規則能量管理策略中的隸屬度函數是研究學者通過工程經驗確定的,并沒有完善的理論指導方法。與確定性規則一樣,模糊規則也需要通過大量實驗數據的積累而得到,其依賴于隸屬度函數的精確度。因此,模糊控制規則仍然無法實現系統的最優控制,隨著輸入量和輸出量的增多,規則集的制定也變得更加困難。雖然有研究學者將智能算法引入到模糊規則中,對隸屬度函數進行優化,但仍無法避免模糊規則主觀性較強的缺點。
3) 負載功率濾波能量管理策略
在電傳動型的混合動力車輛中,若采用前述的規則能量管理策略,負載功率需求的非穩定瞬態過程會對發動機、電機、動力電池等動力源產生較大沖擊,導致發動機運行過程中的劇烈波動,同時降低動力電池的使用壽命。因此,考慮到動力源的工作特性,將負載功率需求根據一定規則進行分解,以此作為動力源輸出的目標值,達到功率流在動力源之間合理分配的目的,但這種負載功率濾波能量管理策略只適用于包含超級電容等高功率密度儲能元件的混合動力系統。負載功率濾波能量管理策略包括非線性比例因子控制策略和基于小波變換的控制策略,2種策略均可以實現合理的功率分流[25]。
張炳力等針對一種包含鋰離子電池、燃料電池、超級電容的新型混合動力系統,提出了一種基于小波變換的能量管理策略。仿真結果表明,該策略按照負載功率需求變化頻率實現了對3種儲能元件能量的合理分配,最終系統性能得到提高,延長了部件的使用壽命,滿足設計要求[25];項宇等針對某型串聯式軍用混合動力車輛開展了能量管理策略研究,根據動力源和負載特性,采用小波變換算法對負載功率需求中的高、低頻分量進行分離,將高頻分量分配給超級電容,低頻分量分配給低輸出頻率的動力源,實現動力源輸出特性與負載頻率特性相匹配。仿真結果表明,所制定的能量管理策略達到了預期的控制效果,可應用于軍用混合動力車輛[26]。
基于規則的能量管理策略較為簡單,可以在一定程度上改善混合動力車輛的燃油經濟性和排放性,但規則的制定依據主要來自研究學者的工程經驗,導致規則并不完善,從而也不能保證系統達到最優控制。因此,更多的研究學者開始關注優化控制理論與智能優化算法以實現最優的控制結果。
2.2 基于優化的能量管理策略
基于優化的能量管理策略是采用數學分析方法,使定義的成本函數在一定約束條件下最小化的控制方法。通常將混合動力車輛的燃油經濟性指標、排放性指標、動力電池電量變化、駕駛性能等作為系統的成本函數,尋求合適的算法最優化混合動力系統性能,能夠較好地解決規則能量管理策略存在的問題。目前,根據策略的優化程度和階段的不同,基于優化的能量管理策略分為全局優化能量管理策略和瞬時優化能量管理策略[27-28]。
1) 全局優化能量管理策略
全局優化能量管理策略是在特定工況下,基于最優控制理論或方法對混合動力系統進行開發研究的一種控制策略。其中心思想是建立以整車油耗或排放為目標函數,系統狀態變量為約束條件的系統全局優化模型,采用最優控制算法得到系統動力源能量最優分配狀態,最終實現整車最佳燃油經濟性或排放性能[29-30]。目前,該能量管理策略中所采用的最優控制算法包括二次規劃算法、單純形法、隨機搜索方法、動態規劃(dynamic programming,DP)算法、龐特里亞金最小值原理(pontryagin minimum principle,PMP)以及智能優化算法等[28,31],其中研究較多的有基于DP算法、基于PMP以及基于智能優化算法的全局優化能量管理策略。
1951年,為了求解多階段決策過程的最優化問題,美國數學家貝爾曼提出DP算法。其主要思想是將一個多階段問題分解成多個單階段決策問題,狀態變量離散化后逆向求解出每個階段的最優解,在這組最優解中找到全局最優解。DP算法從2000年開始被應用于混合動力車輛控制中,其被研究學者一致認為是較為理想的混合動力車輛控制方法,可以較好地改善整車的燃油經濟性,實現系統的全局最優。目前,基于DP的全局優化能量管理策略的主要研究有:
勾華棟采用DP算法得到了混合動力車輛在特定工況下的最優控制序列,從中擬合出發動機輸出轉矩和需求轉矩的比值隨變速器輸入端轉矩的變化規律,研究結果為整車能量管理的實時控制提供了依據[32];巴特等將割線迭代法引入到傳統DP算法中,提出了改進的DP算法,為權系數的確定找到了理論依據,同時基于等效油耗的成本函數考慮了動力電池SOC的影響,以成本函數為目標函數,采用反向遞推法求解最優控制變量的解集,從最優解集中提煉出合理的動力源轉矩分配方式[33];Larsson等將局部線性近似和二次樣條逼近與傳統DP算法相結合,求解混合動力車輛能量管理問題的解析解,解決了傳統DP算法計算量大的問題,降低了計算機仿真過程中的內存需求[34];Ko等采用基于隨機動態規劃(stochastic dynamic programming,SDP)算法的能量管理策略對混合動力系統進行全局優化,對油耗、排放、電池電量3個量取不同權重值構造成本函數,經多次離線迭代得到成本函數的最優解集[35];Lee等采用SDP算法對混合動力車輛進行控制,首先選取功率與車速作為特征參數,對行駛工況進行分解,然后建立基于Markov Process的概率分布,最后以整車燃油經濟性為目標函數建立優化模型。該策略的優化控制方式是通過優化動力源特性得到的,提高了整車的燃油經濟性[36]。
20世紀50年代中期,蘇聯學者Pontryagin等為解決當控制作用集受約束條件限制時如何求最優解集的問題,在經典變分法和經典最優控制理論的基礎上提出了PMP,無論受控系統是連續形式還是離散形式,對于求解系統的最優控制問題該原理均適用。基于PMP的全局優化能量管理策略是以最優化原理為理論基礎對混合動力系統最優控制問題進行求解,計算量比DP算法小,但可以達到相近的優化效果[37]。繼DP算法之后,研究學者對PMP在混合動力系統中的應用也進行了大量探索和研究。目前,基于PMP的全局優化能量管理策略的主要研究有:
Peng等采用基于PMP的全局優化能量管理策略對AT式并聯混合動力車輛的能量管理系統進行控制,其優化效果與基于DP算法的能量管理策略很接近,油耗略高0.4%。在該策略的控制下,車輛換擋與車速有關,起到了較好的控制效果,計算時間節約了70%以上,更便于對系統的實時控制[37];Liu等將龐特里亞金最小值原理與等效燃油消耗最小控制策略結合,以油耗和動力電池SOC作為控制目標對并聯式混合動力車輛進行控制,控制效果接近全局最優[38];Xu等采用PMP對混合動力系統進行實時控制,建立系統模型并推導得到系統的哈密頓方程,在不影響控制精度的前提下假設動力電池參數滿足一定條件,實現了令人滿意的優化效果。優化結果得到的燃油經濟性與DP算法相近,但計算量較小的突出優勢使得PMP算法更便于實現實時控制[39];Onori等提出了一種基于PMP的自適應能量管理策略,混合動力系統可以根據路況行駛條件自動在線調整協變量,比傳統PMP的燃油消耗降低了20%[40]。
隨著智能優化算法的產生與發展,大量研究學者將遺傳算法[41]、粒子群算法[42]、穩健進化算法[43]、博弈進化算法[44]以及神經網絡算法[45-46]等智能優化算法應用于混合動力系統能量管理策略的多目標優化中,實現了系統的全局最優。目前,基于智能優化算法的全局優化能量管理策略的主要研究有:
Panigrahi等采用將遺傳算法和細菌覓食優化算法相結合的方式作為混合動力車輛能量管理方法,引入時間加權平方誤差積分對整車性能進行評價。結果表明,與單一優化算法相比較,聯合算法使車輛燃油經濟性提高約2%,排放也有所下降[47];Sun等采用神經網絡算法對車輛行駛路況信息進行學習預測,優化了混合動力系統的性能,從而提高了整車的燃油經濟性[46];夏超英等應用神經網絡算法的強大學習能力對當前駕駛環境中的道路信息、駕駛模式、交通信息等進行預測,解決了循環工況和駕駛環境對車輛能量消耗影響的問題,并通過學習DP算法實現了對混合動力車輛功率分配的最優控制[48];楊觀賜等采用行為博弈進化算法,以動力性能指標為約束條件并以最小化燃油消耗與污染物排放總量為優化目標,對并聯混合動力汽車控制策略參數進行了優化。優化后系統的百公里油耗和污染物排放總和降幅明顯,提高了動力源和系統效率,相比于基于最優原理的多目標優化算法,博弈進化算法可以獲得精度更高的解[44];陳征等對插電式混合動力公交車開展能量管理策略研究,提出一種進化-增強學習方法。首先,建立系統簡化模型并基于增強學習系統以燃油消耗為目標建立優化目標函數;然后,采用進化算法求出最優的能量分配方法并給出最優燃油消耗值;最后,通過仿真分析,對比傳統電量消耗-維持策略,所提出的方法提高了12%的燃油經濟性,驗證了方法的有效性[49]。
全局優化能量管理策略雖然可以最大限度使得混合動力系統性能達到全局最優,從而提高整車燃油經濟性,但只有獲取未來的行駛工況信息才能進行優化計算,同時無法避免算法計算量大、計算時間長的缺點,因此其實車應用受到了限制。雖然全局優化能量管理策略具有一定應用局限性,但是可以作為一種能量管理策略的評價方法,為實車控制規則的制定提供理論指導。
2) 瞬時優化能量管理策略
為了實現混合動力車輛的實時狀態在線控制,瞬時優化能量管理策略應運而生,也被稱為實時優化能量管理策略。其中心思想是保證混合動力系統能量管理過程中當前時刻的能量消耗最少或功率損失最小,即保證成本函數在每一時刻上達到最優,基于發動機效率特性Map圖得到瞬時最優工作點,保證動力源工作在實時最優狀態。目前,瞬時優化能量管理策略中獲得最廣泛研究的優化方法有等效油耗最小控制策略(equivalent consumption minimization strategy,ECMS)和模型預測控制策略(model predictive control strategy,MPCS)[3]。
基于ECMS的瞬時優化能量管理策略最早是由Paganelli等提出來的,主要思想是將電機消耗的電能等效為發動機的油耗,與實際發動機油耗相加得到等效油耗,在某一瞬時工況下以該等效油耗最小為目標得到此時動力源能量分配方式,即最佳分配方式,從而實現混合動力系統瞬時最優控制,主要的研究有:
黃碩等根據車輛目標車速與實際車速的差值得到當前整車需求轉矩,采用ECMS求解得到動力源瞬時優化的轉矩分配方式,同時考慮到發動機起閉對燃油經濟性的影響,通過規則修正方法對轉矩分配方式做進一步調整,實現了整車油耗的進一步降低[50];Gupta采用模糊規則與ECMS相結合的方式對混合動力系統能量管理進行控制,以車速、加速度、動力電池SOC作為模糊控制器的輸入量,以電機單獨驅動、發動機單獨驅動、聯合驅動、再生制動四大類工作模式為模糊控制器的輸出量,僅在行車發電模式和混合模式中應用ECMS進行需求轉矩分配[51];Han等提出了一種預測自適應的ECMS,通過獲取一些預測信息或歷史數據以調整等效因子的取值,使其隨工況變化而不斷調整,從而獲得更好的車輛性能[52];Zhang等采用一種駕駛行為在線分類方法,提出了一種改進的自適應ECMS,分析了駕駛方式和交通狀況對燃油消耗和污染物排放的影響。研究結果表明,可以根據駕駛行為和實時交通信息實時調整等效因子,改善了混合動力系統性能[53];張靜等采用ECMS,以油耗和動力電池荷電狀態作為控制目標對并聯式混合動力卡車進行控制,既保證了算法的實時性,控制效果又接近全局最優[54]。
近年來,MPCS方法魯棒性強、預測能力強、實時計算能力強,適用于非線性、非精確動態系統的控制,在一定程度上它還可以克服ECMS無預測能力、對行駛工況敏感等缺點[3]。因此,基于MPCS的瞬時優化能量管理策略在混合動力車輛控制領域也得到了廣泛應用[7]。其中心思想是通過在線識別混合動力系統動態參數,將整個循環工況燃油經濟性的全局優化轉化為預測區間內的局部優化,通過對動態參數進行滾動循環優化,更新預測出車輛下一段時間區間的工作狀態從而獲得優化結果[1]。目前,基于MPCS的瞬時優化能量管理策略的主要研究有:
趙韓等采用基于模型預測的能量管理策略對并聯式混合動力車輛的整車需求轉矩進行預測,建立轉矩分配問題的馬爾科夫模型,并結合動態規劃算法,以油耗最小化為目標進行優化控制,實現了較好的優化效果[55];Cairano等結合馬爾科夫鏈隨車學習方法提出了一種改進的隨機MPCS,應用于一款串聯式混合動力車輛的能量管理中,通過駕駛員感知控制車輛,對隨機參數可以實時重新配置以適應駕駛員行為的變化,同時可以約束動力電池功率以及充放電狀態,在實際駕駛循環中可以更好地預測未來的駕駛員功率需求,實現了實時控制[56];Yu等提出了一種基于坡度信息的MPCS,考慮不同道路坡度和阻力系數建立混合動力車輛的動力學模型,通過仿真分析在不同道路狀況、預測時間、車輛充放電狀態下路面信息對燃油經濟性的影響。結果表明所提出的方法在提高燃油效率方面是有效的,采用連續廣義最小殘差法求解MPCS問題,取得了較好的節能效果[57];Homchaudhuri等提出了一種用于城市網聯車輛的快速MPCS,利用交通信號燈定時信息、車輛之間的通訊信息開發控制策略,從而減少紅燈停車次數,提高燃油經濟性。仿真結果表明,該方法可以提高網聯汽車互聯性能和效率,解決了非線性能耗問題[58];Shi等將非線性MPCS應用于混合動力車輛的動態控制中,優化了運行程序,通過仿真對比分析,所提出的控制策略在混合動力車輛能量管理策略設計中是有效可行的[59]。
隨著我國經濟社會的發展和人民生活水平的不斷提高,我國對糧食的需求量不斷增加。近年來,綠色食品已成為人們購買和購買的熱點。大豆意味著在生產和種植過程中,大豆生產基地周圍的環境是良好的,沒有城市污染。同時,在施肥過程中采用綠色肥料。大豆產量完全符合國家標準。然而,在大豆的種植過程中還存在病蟲害許多問題,本文將對些提供相關的經驗,以共參考。
瞬時優化能量管理策略是針對混合動力車輛瞬時工況的能量分配進行優化控制,計算量相對較小,易于實車應用,但優化過程并未考慮駕駛風格、行駛里程、能量價格比等因素對燃油經濟性的影響。因此,瞬時優化結果無法保證全局最優,車輛燃油經濟性仍有很大改善空間。
2.3 基于工況自適應的能量管理策略
近年來,隨著數據挖掘和大數據技術不斷提高,研究人員更加關注能量管理策略的工況適應性與實時控制性,因此人們開始深入研究工況預測技術與識別算法,進一步實現整車性能的優化。基于工況自適應的能量管理策略是通過分析現有行駛工況信息對未來某一段時間內的行駛工況進行預測,或者通過地理信息系統(GIS)、全球定位系統(GPS)、智能交通系統(ITS)等工具得到未來行駛工況信息,根據獲取的工況信息實時調整混合動力系統的工作方式進而實現系統的自適應控制。
Xing等提出了一種基于循環工況識別的自適應能量控制策略,通過對行駛工況片段的研究,分析其特征參數,在此基礎上提出了面向10個特征參數的學習矢量量化(learning vector quantization,LVQ)神經網絡識別算法。仿真結果表明,該方法具有很好的識別精度[60];Leroy等以車速、加速度、動力電池SOC和發動機狀態4個參數建立馬爾科夫鏈預測模型,采用隨機DP算法優化系統的能量分配,再將有約束的能量管理策略在線優化轉換為無限時域的離線優化[61];Zheng等基于GPS和GIS的道路信息建立預測模型,以油耗最小為優化目標,動力電池SOC和功率分別為狀態變量和控制變量,根據預測的未來行駛工況信息,采用PMP對整車的能量分配進行優化[62];Sun等采用徑向基函數神經網絡和PMP相結合的能量管理策略,對行駛工況進行預測的前提下優化混合動力系統的能量分配,優化過程中拉格朗日乘子隨工況的改變而不斷調整,從而提高了能量管理策略的工況適應性,進一步改善了車輛的燃油經濟性[63];Wang等對工況識別結果進行了分析,得到特征參數、預測周期、識別周期、工況類型之間的關系,從中選取最優預測周期和識別周期,結合LVQ神經網絡算法對實際行駛工況進行工況識別,最后采用等效油耗最小控制策略提高了整車燃油經濟性[64];劉永剛等以GPS和GIS作為工具獲取工況信息,建立道路坡度預測模型,采用相似行駛工況估算坡度的能量消耗,得到車輛在進入坡道前動力電池SOC的目標值,在電量維持模式和電量消耗模式下實現了對預充電時刻的規劃[65];詹森等提出將K均值聚類方法和遺傳算法相結合的行駛工況識別方法,基于此工況識別方法,應用ECMS實時優化混合動力系統的能量分配[66];連靜等采用模糊控制方法對行駛工況進行識別,然后應用考慮動力電池SOC平衡的ECMS求解不同工況下的最優控制參數,從而實現了對動力源能量分配的實時控制[67]。
基于工況自適應的能量管理策略只根據歷史工況信息或通過GPS、GIS、ITS等工具獲取未來行駛工況信息,計算量不大,但如果行駛工況信息預測方法選擇不當,仍舊會影響其在實車上的應用,并且該策略得到的能量分配方式也不是全局最優。
3 存在的問題
綜上,每種能量管理策略都有相應的優缺點,具體特點如表1所示。
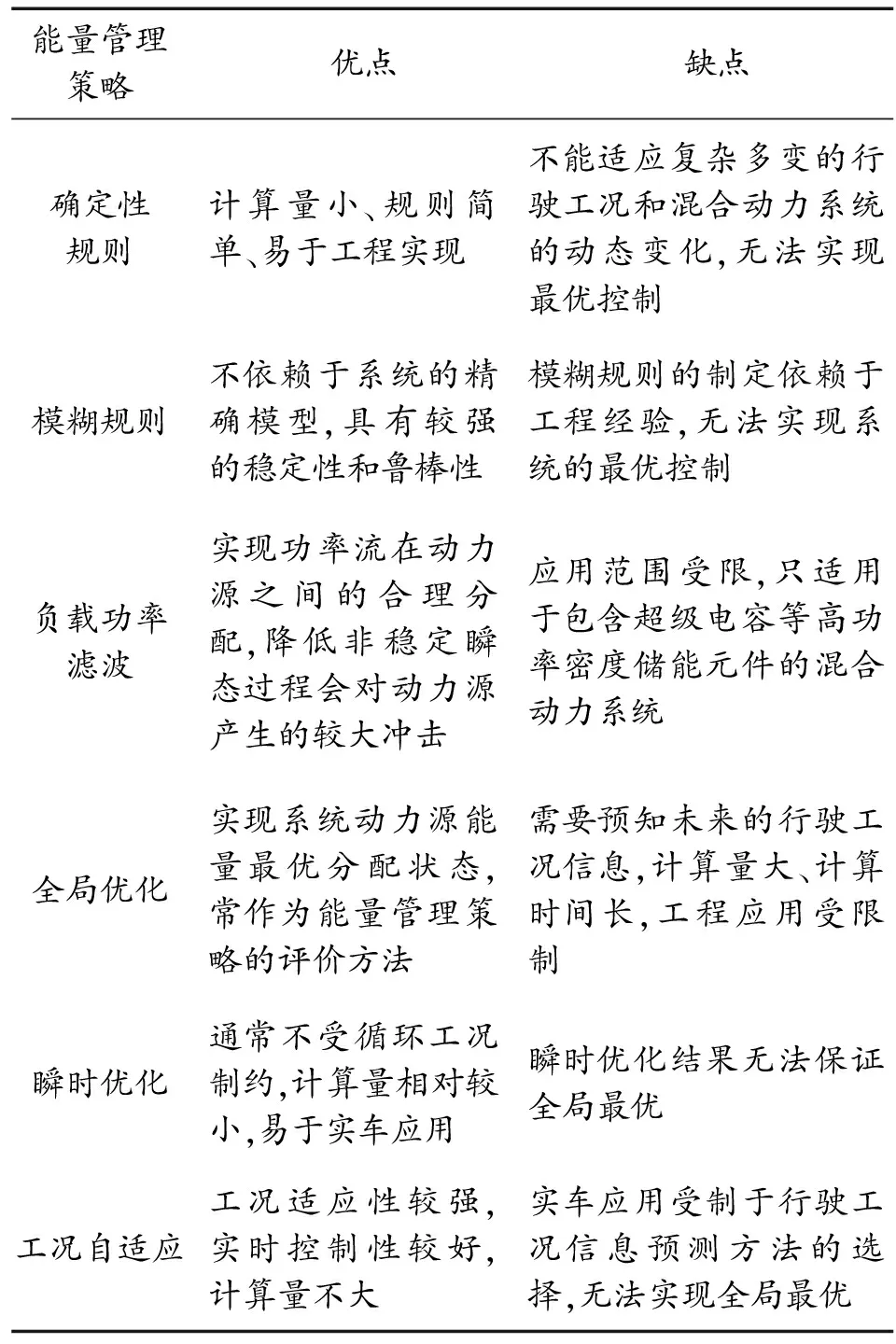
表1 能量管理策略特點對比
在傳統民用混合動力車輛控制策略研究中,受到系統優化目標和車輛使用環境條件的影響,控制方法靈活多樣、日漸成熟,但每種控制策略都有相應的局限性。目前混合動力車輛能量管理策略具有算法復雜、抗擾動能力弱等缺點,一部分基于優化的能量管理策略復雜,受限于控制器的運行能力難以實現實時控制,對于運行特性復雜的軍用混合動力車輛并不適用且控制難度大。例如,隨機DP算法對控制器參數和環境噪聲比較敏感,不適合在軍用車輛干擾嚴重的惡劣工作環境中使用;現有的單一駕駛循環工況適用于民用混合動力車輛,但無法滿足軍用車輛面向戰場的使用要求;神經網絡算法訓練樣本需求量大且無法在線運行的缺陷限制了其使用范圍,無法在軍用車輛上實現;GPS、GIS、ITS等智能工具可用于民用車輛預測未來行駛工況,但不適合軍用車輛。因此,應該選擇算法簡單、實時控制效果好、工況適應性強的控制策略作為軍用混合動力車輛能量管理策略。
目前,雖然有不少關于規則能量管理策略和瞬時優化能量管理策略的研究,但這2種策略都只是單獨使用,二者組合成新的混合控制策略會比單獨使用效果更好,可以取得和全局優化接近的控制效果,適合軍用混合動力系統的能量管理。同時,軍用混合動力車輛的工況較多,不同工況下的系統特性又有很大差別,能量管理策略的控制效果很大程度上取決于其對各種工況的適應性。目前,模糊控制、神經網絡、支持向量機等算法雖然在工況識別方面可以獲得較好的識別效果,但受限于車載控制器的運算能力,算法程序無法直接導入控制器進行實時控制,因此如何選擇合理的工況識別算法是能量管理策略應用于軍用混合動力車輛的關鍵。同時有研究表明,只有獲取行駛工況信息,實時優化控制才能實現真正意義上的優化[68]。
4 結論
隨著智能優化算法、物聯網等技術的不斷發展,軍用混合動力系統能量管理今后的發展趨勢,大體有以下3個方面:
1) 多目標協調優化的能量管理策略。傳統的能量管理策略基本只考慮動力性和經濟性兩個指標,對排放性、動力電池成本和使用壽命、系統的壽命成本以及駕駛員駕駛行為等指標進行綜合優化的研究較少,可以根據軍用混合動力車輛在不同戰場環境和運行工況下,考慮各個指標所占權重,對各個指標進行協調優化,作為整車能量管理的控制原則,也是研究能量管理策略的最終目標。
2) 混合式控制的能量管理策略。如前文所述,每種能量管理策略都有相應的優缺點,采用2種或者多種能量管理策略相融合的方式,綜合了各種能量管理策略的優勢,組合成新的控制策略來彌補各自的缺點,取長補短以達到更好的優化效果。如邏輯規則能量管理策略和等效油耗最小控制策略的組合比單獨應用某一控制策略要有更好的效果,也符合軍用車輛能量管理策略未來的發展趨勢。
3) 更豐富的動力源與新技術的應用。與民用混合動力系統不同,軍用混合動力系統中還存在大功率用電負載,這就需要考慮開發和引入新型電源部件(如超級電容),因此,軍用車輛能量管理策略需要實現新型電源部件與原有動力源的協同控制;動力源豐富的同時也使得算法更復雜,加深了其與能量管理策略優化實時性的矛盾,分層控制技術與云計算技術的引入為解決這個問題提供了新思路與技術支撐。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
Coco薇(2017年11期)2018-01-03 20:59:57