基于條件隨機場的駕駛意圖識別研究
2021-12-08 13:46:19王亞倫陳煥明趙巖
青島大學學報(工程技術版) 2021年4期
王亞倫 陳煥明 趙巖
摘要: ?為了提高高級駕駛輔助系統的安全性和可靠性,本文提出了一種基于條件隨機場的駕駛意圖識別模型。在模擬駕駛器中,通過采集到的偏航角和車輛質心到車道中心線的距離,計算出車輛前輪壓線點的時刻,從而確定車道保持意圖、左換道意圖和右換道意圖3種意圖時窗,并對識別結果進行對比。記錄了12名受試者的駕駛樣本共200組,通過對比樣本的差異,確定了7個駕駛意圖特征參數。仿真結果表明,基于CRF的識別效果很好,選取意圖時窗T=12 s最合理,而且LK、LCL和LCR 3種駕駛意圖綜合評價指標(F1值)分別達到了9526%、9646%和9519%,能準確地識別出駕駛員的駕駛意圖,極大提高了行車的安全性。該研究為駕駛意圖識別領域的發展提供了參考。
關鍵詞: ?ADAS; 條件隨機場; 意圖識別; 意圖時窗; 綜合評價指標
中圖分類號: U491.2+5; U467.5+1; TP391.4 文獻標識碼: A
基金項目: ?山東省高等學校科技計劃項目(J18KA048)
近年來,大量企業和研究機構致力于開發高級駕駛輔助系統(advanced driving assistance system,ADAS),通過自動調節汽車的電子、機電和通信系統,提醒駕駛員潛在的危險或危險來臨時如何減輕碰撞損壞,從而提高駕駛員行車的安全性[1]。常見的ADAS技術有自適應巡航控制(adaptive cruise control,ACC)、車道偏離預警(lane departure warning,LDW)、車道保持輔助(lane keep assistance,LKA)和側面警告輔助(side warning assistance,SWA)等,但這些輔助系統大多是在沒有考慮駕駛員意圖的情況下做出判斷[2],這將干擾駕駛員的正常操作并降低行車的安全性。駕駛員是“人車路”系統的核心,因此準確的駕駛意圖識別是提高ADAS安全性和可靠性的關鍵。目前,國內外學者提出了很多駕駛意圖識別方法,如支持向量機(support vector machine,SVM)、貝葉斯決策(bayesian decision,BD)、神經網絡和隱馬爾可夫模型(hidden markov model,HMM)等。Husen M N等人[3]通過利用句法識別方法中的上下文無關語法,對換道和轉彎過程中的駕駛行為參數以符號的形式表示,形成代表特定行為的句子,實現了駕駛意圖的識別;郭應時等人[4]通過分析換道行為和車輛運動狀態,建立基于BP神經網絡和證據理論的換道意圖識別模型,對意圖換道進行實時識別試驗,結果表明證據理論識別模型具有更高的識別準確率;Liao Y等人[5]提出一種基于SVM的駕駛員認知分心實時檢測算法,對駕駛員的駕駛意圖具有較高的識別率;李敏等人[6]建立了基于粒子群算法的SVM和神經網絡的駕駛意圖識別模型,對比發現后者具有更高的識別率;姜順明等人[7]提出一種基于貝葉斯網絡的旁車并線意圖識別模型,對并線樣本和直行樣本均具有較高的識別率;劉志強等人[8]運用HMM和SVM級聯算法,建立駕駛員駕駛意圖識別模型,其識別結果明顯高于HMM和SVM單一算法。上述研究雖然識別的準確率較高,但存在模型過于復雜、所需訓練數據樣本量過大的問題。基于此,本文通過模擬駕駛器采集駕駛意圖特征參數,采用基于條件隨機場(conditional random field, CRF)的駕駛意圖識別方法,對駕駛意圖進行識別檢測。通過采集到的偏航角和車輛質心到車道中心線的距離,計算車輛前輪壓線點的時刻,確定車道保持意圖、左換道意圖和右換道意圖3種意圖時窗,并對識別結果進行對
比。記錄12名受試者的駕駛樣本共200組,通過對比樣本的差異,確定7個駕駛意圖特征參數進行仿真實驗。實驗結果表明,該研究能準確識別駕駛員的駕駛意圖,提高行車安全性。
1試驗方案
1.1試驗平臺及試驗場景設計
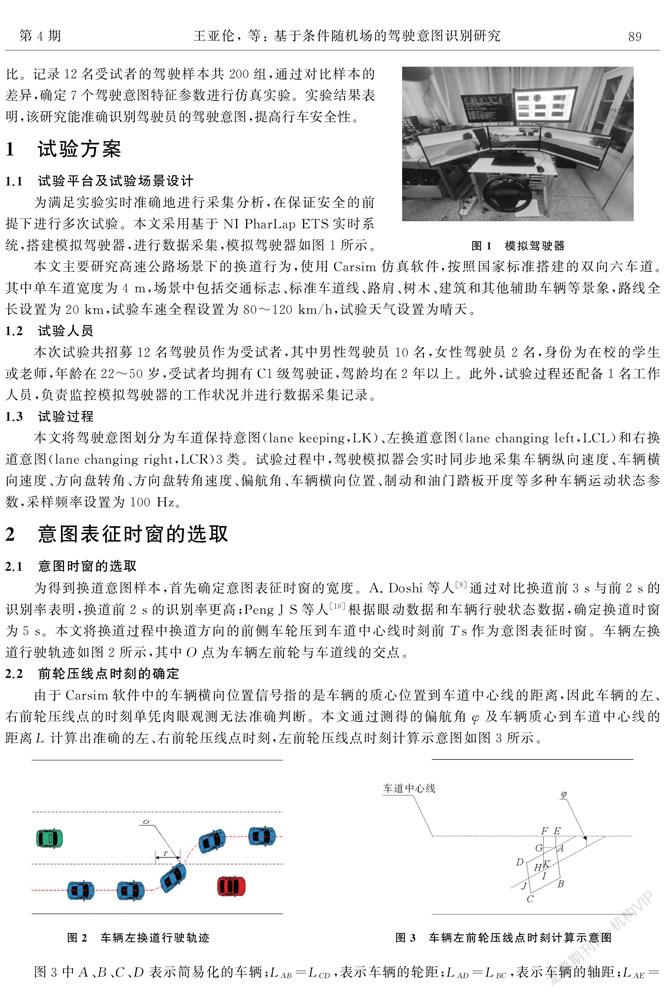
為滿足實驗實時準確地進行采集分析,在保證安全的前提下進行多次試驗。本文采用基于NI PharLap ETS實時系統,搭建模擬駕駛器,進行數據采集,模擬駕駛器如圖1所示。
本文主要研究高速公路場景下的換道行為,使用Carsim仿真軟件,按照國家標準搭建的雙向六車道。其中單車道寬度為4 m,場景中包括交通標志、標準車道線、路肩、樹木、建筑和其他輔助車輛等景象,路線全長設置為20 km,試驗車速全程設置為80~120 km/h,試驗天氣設置為晴天。
1.2試驗人員
本次試驗共招募12名駕駛員作為受試者,其中男性駕駛員10名,女性駕駛員2名,身份為在校的學生或老師,年齡在22~50歲,受試者均擁有C1級駕駛證,駕齡均在2年以上。此外,試驗過程還配備1名工作人員,負責監控模擬駕駛器的工作狀況并進行數據采集記錄。
1.3試驗過程
本文將駕駛意圖劃分為車道保持意圖(lane keeping,LK)、左換道意圖(lane changing left,LCL)和右換道意圖(lane changing right,LCR)3類。試驗過程中,駕駛模擬器會實時同步地采集車輛縱向速度、車輛橫向速度、方向盤轉角、方向盤轉角速度、偏航角、車輛橫向位置、制動和油門踏板開度等多種車輛運動狀態參數,采樣頻率設置為100 Hz。
2意圖表征時窗的選取
2.1意圖時窗的選取
為得到換道意圖樣本,首先確定意圖表征時窗的寬度。A. Doshi等人[9]通過對比換道前3 s與前2 s的識別率表明,換道前2 s的識別率更高;Peng J S等人[10]根據眼動數據和車輛行駛狀態數據,確定換道時窗為5 s。本文將換道過程中換道方向的前側車輪壓到車道中心線時刻前Ts作為意圖表征時窗。車輛左換道行駛軌跡如圖2所示,其中O點為車輛左前輪與車道線的交點。
2.2前輪壓線點時刻的確定
由于Carsim軟件中的車輛橫向位置信號指的是車輛的質心位置到車道中心線的距離,因此車輛的左、右前輪壓線點的時刻單憑肉眼觀測無法準確判斷。本文通過測得的偏航角φ及車輛質心到車道中心線的距離L計算出準確的左、右前輪壓線點時刻,左前輪壓線點時刻計算示意圖如圖3所示。
圖3中A、B、C、D表示簡易化的車輛;LAB=LCD,表示車輛的輪距;LAD=LBC,表示車輛的軸距;LAE=LGF,表示車輛左前輪到車道中心線的距離;φ為車輛的偏航角;點A視為車輛的左前輪;點I視為車輛的質心;點H視為車輛質心I到AD做垂線的垂足且視為軸距AD的中點,點E視為車輛左前輪A到車道中心線做垂線的垂足,點F為車輛質心點I到車道中心線做垂線的垂足,點K為IF與AD的交點。
利用三角形關系可得
L=LGF+LGK+LKI(1)
LAE=LGF(2)
LKI=LHI/cos?φ(3)
LGK=(LAH-LHI×tan?φ)×sin?φ(4)
式中,LAH為車輛軸距的1/2;LHI為車輛輪距的1/2。本文選定的目標車輛為Carsim中的C級車,其軸距為2 910 mm,輪距為1 916 mm。
根據三角形相似的性質可知,圖3中∠HIK=∠GAK=φ,tan?φ=tan∠HIK=LKH/LHI,sin?φ=sin∠GAK=LGK/LAK,進而得出LHI×tanφ=LKH,LAH-LKH=LAK,最終得到LGK=LAK×sin?φ。
當LAE=0時,計算出左前輪壓線點的時刻,不管采樣率的取值多小,總存在時間間隔,所以部分剛好處于壓線點時刻的數據無法采集。本文采樣頻率為100 Hz,采樣間隔為0.01 s,其誤差不超過0.015 m,右換道同上。
2.3樣本篩選
確定好意圖表征時窗后,分別選取圖2中T=1,1.2,1.5 s,該特征數據量作為左換道意圖階段的樣本進行對比,右換道同理。為了便于后續的對比分析,隨機截取無明顯換道意圖且樣本量同為T的特征數據段作為車道保持意圖階段的樣本。
按照上述要求篩選出200組樣本,其中LK樣本100組,LCL樣本50組,LCR樣本50組,為提高識別效果,將樣本以4∶1的比例分為訓練樣本和測試樣本。
3駕駛意圖特征參數的確定
對篩選的LK樣本、LCL樣本和LCR樣本的特征參數數據進行分析對比,排除差異小的參數,根據選取特征參數時遵循易量化、全面性和相互獨立性的原則[11],經獨立樣本T檢驗,選取出伴隨概率p<0.05,即存在顯著性差異的特征參數。
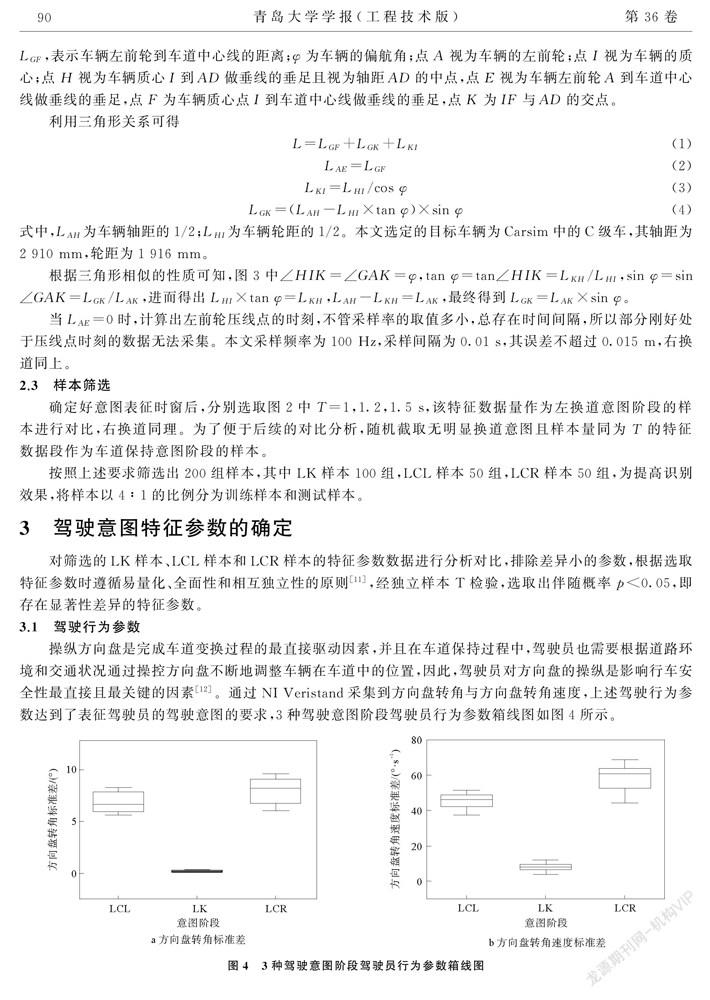
3.1駕駛行為參數
操縱方向盤是完成車道變換過程的最直接驅動因素,并且在車道保持過程中,駕駛員也需要根據道路環境和交通狀況通過操控方向盤不斷地調整車輛在車道中的位置,因此,駕駛員對方向盤的操縱是影響行車安全性最直接且最關鍵的因素[12]。通過NI Veristand采集到方向盤轉角與方向盤轉角速度,上述駕駛行為參數達到了表征駕駛員的駕駛意圖的要求,3種駕駛意圖階段駕駛員行為參數箱線圖如圖4所示。
3.2車輛狀態和道路參數
車道變換屬于車輛橫向運動的一種,選擇與車輛橫向運動相關的特征參數能準確地表達車輛的橫向運動狀態,提高識別的準確率。因此,本文選取了車輛的橫向位置、橫向速度和加速度以及偏航角和側傾角等特征參數。上述車輛狀態和道路特征參數均達到了表征駕駛員的駕駛意圖的要求,3種駕駛意圖階段車路參數箱線圖如圖5所示。
基于以上分析,結合圖4和圖5,選定的駕駛意圖特征參數如下:
1)駕駛行為參數。方向盤轉角(°),方向盤轉角速度(°/s),橫向位置(m),橫向速度(km/h)。
2)車輛狀態和道路參數。橫向加速度(m/s2),偏航角(°),側傾角(°)。
4基于CRF的模型訓練及仿真分析
隱馬爾可夫模型(hidden markov model, HMM)是用于標注問題的統計學習模型,根據定義隱馬爾可夫模型作了2個基本假設,即齊次馬爾可夫性和觀測獨立性假設[13]。HMM的缺點是只依賴于每個時刻的狀態和它對應的觀察對象,即在任意時刻觀察值僅僅與狀態(要標注的標簽)有關,計算狀態轉移概率和觀測概率是分開計算的,可認為相互獨立,而序列標注問題跟單個詞及其上下文即觀測序列的長度都相關,條件隨機場解決了該缺點,可以任意容納上下文信息。此外,條件隨機場使用全局優化技術,解決了最大熵馬爾可夫模型的標注偏置問題。
條件隨機場(conditional random field, CRF)主要用于標注問題[14],相比其他序列標注模型,CRF綜合考慮了空間上下文特征并作出了全局統計,能得到更好的標注結果[15],已被廣泛證明可實現詞性標注的功能,因此CRF在自然語言處理領域得到廣泛應用。本文嘗試將CRF運用到意圖識別領域,對駕駛意圖特征參數進行標注,檢驗其識別效果。
4.1線性鏈條件隨機場
將CRF的預測問題看作求非規范化概率最大的最優路徑問題,路徑表示標記序列,采用動態規劃的維特比算法(Viterbi)求解。
4.2模型仿真與訓練
1)樣本數據預處理。駕駛員在模擬駕駛器與實車的駕駛上存在區別,所以在數據采集過程中會與真實值產生一定偏差,因此需要剔除異常數據。異常值剔除的方法主要有拉依達準則(3σ準則)、狄克遜準則、法拉布斯準則、法格肖維勒準則、法羅馬諾夫斯基準則等[16]。由于拉依達準則在剔除異常值簡便、無需查表,因此本文采用拉依達準則。
2)基于CRF的識別流程。基于CRF的識別流程如圖7所示。首先將原始數據進行預處理,剔除異常值得到待標注的數據,然后根據標注規范進行人工標注,得到標注好的數據。其中,將車道保持數據標注為2,左換道數據標注為3,右換道數據標注為1;將一部分標注好的數據作為訓練數據輸入到CRF模型中進行訓練,得到訓練好的CRF模型;將另一部分標注好的數據作為測試數據輸入到訓練好的CRF模型,最后得到識別結果。
3)評價指標。本文采用自然語言處理領域常用的評價指標,包括精確率P(Precision)、召回率R(Recall)和F1值[17-19]。其評價指標分別為
將正類判斷為負類,即應當識別出卻沒有識別出的駕駛意圖的數目;FP(False Positive)表示將負類判斷為正類,即沒有識別出的駕駛意圖的數目;TN(True Negative)表示將負類判斷為負類。參數含義如表1所示。
4)仿真結果分析。分別將T=1.5,1.2,1 s的樣本數據導入CRF模型,求得T不同時的駕駛意圖識別結果如表2所示。由表2可以看出,當T=1 s時的駕駛意圖識別效果最好;當T=1.2 s時,LK、LCL和LCR 3種駕駛意圖的F1值分別達95.26%,9646%,9519%,均在95%以上,說明CRF的識別效果較為理想,且不需要過多的訓練數據即可獲得良好的識別結果。相關研究表明,如果能提前1 s預測到危險事故,并對駕駛員進行提醒,可避免很多交通事故。因此,選取T=1.2 s作為意圖表征時窗,既能達到理想的識別效果,又可為駕駛員預留出更多的反應時間。
5結束語
本文通過模擬駕駛器采集了7種駕駛行為參數,分別為方向盤轉角和方向盤轉角速度2種駕駛行為參數以及車輛的橫向位置、橫向速度、橫向加速度和偏航角5種車輛狀態和道路參數,作為駕駛意圖識別的表征參數。在100 Hz的采樣率下,通過偏航角和車輛質心到車道中心線的距離準確地計算出了目標車輛前輪壓線點的時刻,從而確定3種意圖時窗。本文基于CRF建立了駕駛意圖識別模型,在大大減少訓練樣本的同時獲得良好的識別結果,LK、LCL和LCR 3種駕駛意圖的F1值分別達到了95.26%、96.46%和95.19%,通過對比最終選取意圖時窗T=1.2 s最為合理,能準確地識別出駕駛員的駕駛意圖,極大地提高了行車的安全性,并為駕駛意圖識別領域的發展提供了參考。后續研究中,可加入雙目攝像頭對駕駛員的頭面部信息進行采集并納為駕駛意圖表征參數,對駕駛意圖進行更準確的判斷。此外,還可改進算法的結構,加大樣本容量來提高識別的準確率。
參考文獻:
[1]Koesdwiady A, Soua R, Karray F, et al. Recent trends in driver safety monitoring systems: State of the Art and Challenges[J]. IEEE Transactions on Vehicular Technology, 2017, 66(6): 45504563.
[2]Xing Y, Lv C, Wang H, et al. Driver lane change intention inference for intelligent vehicles: ramework, Survey, and Challenges[J]. IEEE Transactions on Vehicular Technology, 2019, 68(5): 43774390.
[3]Husen M N, Lee S. Continuous car driving intention recognition with syntactic pattern approach[C]∥International Conference on Information and Communication Technology. Bandung, Indonesia: IEEE, 2017: 7176.
[4]郭應時, 付銳, 趙凱, 等. 駕駛人換道意圖實時識別模型評價及測試[J]. 吉林大學學報: 工學版, 2016, 46(6): 18361844.
[5]Liao Y, Li S E, Li G, et al. Detection of driver cognitive distraction: An SVM based realtime algorithm and its comparison study in typical driving scenarios[C]∥Intelligent Vehicles Symposium. Gothenburg, Sweden: IEEE, 2016: 394399.
[6]李敏, 曲大義, 張西龍, 等. 基于粒子群算法的神經網絡的駕駛意圖識別[J]. 科學技術與工程, 2018, 18(36): 261265.
[7]姜順明, 匡志豪, 王奕軒, 等. 基于貝葉斯網絡的車輛并線意圖識別[J]. 河南科技大學學報: 自然科學版, 2021, 42(5): 3944.
劉志強, 吳雪剛, 倪捷, 等. 基于HMM和SVM級聯算法的駕駛意圖識別[J]. 汽車工程, 2018, 40(7): 858864.
[9]Doshi A, Trivedi M M. On the roles of eye gaze and head dynamics in predicting driver′s intent to change lanes[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(3): 453462.
[10]Peng J, Wang K, Xu L, et al. Lane changing decision based on binary finite and zerosum grey game[J]. Journal of Discrete Mathematical Ences & Cryptography, 2017, 20(4): 767779.
[11]袁偉, 付銳, 郭應時, 等. 基于視覺特性的駕駛人換道意圖識別[J]. 中國公路學報, 2013, 26(4): 132138.
[12]彭金栓. 基于視覺特性與車輛相對運動的駕駛人換道意圖識別方法[D]. 西安: 長安大學, 2012.
[13]李航. 統計學習方法[M]. 北京: 清華大學出版社, 2012.
[14]Lafferty J, Mccallum A, Pereira F C N. Conditional random fields: probabilistic models for segmenting and labeling sequence data[C]∥18th International Conf on Machine Learning. Massachusetts, America: 2001: 282289.
[15]許也, 申柏希, 徐翔, 等. 基于條件隨機場的非規范化中文地址解析方法[J]. 地理與地理信息科學, 2019, 35(2): 1218.
[16]朱春楊. 城市快速路駕駛人換道意圖識別研究[D]. 西安: 長安大學, 2018.
[17]董永權, 李慶忠, 丁艷輝, 等. 基于約束條件隨機場的Web數據語義標注[J]. 計算機研究與發展, 2012, 49(2): 361371.
[18]潘清清, 周楓, 余正濤, 等. 基于條件隨機場的越南語命名實體識別方法[J]. 山東大學學報: 理學版, 2014, 49(1): 7679.
[19]鄔倫, 劉磊, 李浩然, 等. 基于條件隨機場的中文地名識別方法[J]. 武漢大學學報: 信息科學版, 2017, 42(2): 150156.
作者簡介: ?王亞倫(1996),男,碩士研究生,主要研究方向為汽車動態仿真與控制技術。
通信作者: ?陳煥明(1978),男,博士,講師,碩士生導師,主要研究方向為車輛動態仿真與控制技術。 Email: qdchm@qdu.edu.cn
Research on Driving Intention Recognition Based on Conditional Random Field
WANG Yalun, CHEN Huanming, ZHAO Yan
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract: ?A driving intent recognition model based on conditional random field (CRF) is proposed to improve the safety and reliability of advanced driver assistance systems (ADAS). Experiments were carried out in a driving simulators, and the time of the front wheel pressing point of the vehicle was calculated based on the collected yaw angle and the distance from the center of mass of the vehicle to the centerline of the lane, thereby determining the three intention time windows and finally comparing the recognition results. A total of 200 sets of driving samples of 12 testes are recorded. By comparing the differences between the lane keeping (LK) intention, lane changing left (LCL) intention and lane changing right (LCR) intention samples, 7 driving intention characteristic parameters are determined. The simulation results show that the recognition effect based on CRF is very good, and the selection of the intent time window T=12 s is the most reasonable, and the three comprehensive evaluation indexes(F1 value) of LK, LCL and LCR driving intention reached 9526%, 9646% and 9519% respectively, which are all above 95%. It can accurately identify the driver′s driving intention, greatly improve the safety of driving, and provide a reference for the development of driving intention recognition.
Key words: ADAS; CRF; intent recognition; intent window; comprehensive evaluation index