通用化高精地圖數據模型
2021-12-09 03:12:26劉經南
測繪學報 2021年11期
關鍵詞:模型
張 攀,劉經南
1. 武漢大學測繪學院,湖北 武漢 430079; 2. 貴州寬凳智云科技有限公司北京分公司,北京 100016
高精地圖,國際一般稱為高分辨率地圖(high definition map,HD Map)或者高度自動駕駛地圖(highly automated driving map,HAD Map),國內也稱其為自動駕駛地圖,是一種面向車輛高級輔助駕駛、自動駕駛及智慧交通的電子地圖產品[1]。與導航電子地圖相比,高精地圖具有更高的精度和更豐富的數據內容,通常包括道路[2]、車道[3-4]、道路上的地面標志物[5]以及交通控制信息[6]。高精地圖大約在2014年受到自動駕駛需求的驅動而產生,伴隨著自動駕駛的快速發展而逐漸成為研究熱點話題。行車環境感知是實現自動駕駛的前提,自動駕駛系統首先需要感知車輛周邊的道路交通環境,然后才能規劃行車路徑,最后通過控制執行實現自動駕駛[7]。因此,智能網聯汽車一般安裝了各種傳感器來實現行車場景環境感知,例如攝像頭、GNSS、INS、毫米波雷達、超聲波雷達和激光雷達等。但僅依靠傳感器還無法實現完整可靠的環境感知,因為傳感器自身存在諸多限制。例如傳感器的感知范圍有限,一般在200 m以內,同時也無法感知位于其視場角(FOV)之外的物體。此外,傳感器容易受到惡劣天氣和環境噪聲的影響而無法正常工作,并且需要高性能的計算、耗電多。高精地圖可以作為一種行車基礎設施提供全天候超視距的感知,解決傳感器感知邊界和使用條件受限的問題,增強自動駕駛系統的穩健性。除了應用到環境感知,高精地圖還被大量應用到高精度定位和路徑規劃[8-13]。
盡管很多自動駕駛公司已經開始使用高精地圖,但大多采用的是自有格式或者擴展現有格式,只能滿足該公司或者特定項目需要,不具備通用性和大規模應用能力[14]。地圖行業一般將地圖規格劃分為3個大的階段,母庫規格、交換規格、物理規格,如圖1所示。規格的簡單定義如下:規格=數據模型+存儲文件格式。其中存儲文件格式有空間數據庫、json、ShapeFile等,規格的核心是數據模型(包含表達方式)。

圖1 高精地圖數據處理階段及對應的規格Fig.1 HD maps data processing stage and corresponding format
母庫規格是數據制作階段采用的規格,利用自動化或者人工的手段從原始采集數據中提取和制作物理世界存在的要素,如車道線、交通標志牌等,然后再生成虛擬的要素,如車道中心線、交通規制信息、車道拓撲關系等。因此在數據模型定義上,需要將物理要素和虛擬要素進行分離,即虛擬要素的表達建立在物理要素之上。
交換規格作為數據交換的規格,在數據模型上與母庫規格之間的差異很小甚至沒有差異,一般采用ShapeFile或者MIF等GIS數據格式進行存儲。ShapeFile格式作為一種通用的空間矢量數據格式,其特點是通過點、線、面表達空間對象的幾何形狀,同時具備定義屬性和關系的能力,但圖層的劃分、要素形狀表達類型和含義、屬性字段的詳細定義等需要通過數據模型來明確。
在應用階段,重點關注的不再是數據制作工藝的合理性與便利性,而是數據在終端上的應用效率和數據量大小,因此終端的物理格式往往建立以瓦片(tile)為單位的空間索引和道路要素層級關聯關系,并采用二進制化的方式壓縮地圖的數據量。
總之,高精地圖的數據模型和表達方式直接決定了高精地圖的制作內容,即制作哪些要素和屬性、制作成什么形式,也關系到了高精地圖制作工藝,即如何制作,還影響后續的終端物理格式編譯及應用方式。因此,通用化、標準化的高精地圖數據模型對于推進高精地圖規模化發展與應用具有重要作用。
歐美等國家提出的NDS標準格式是一種典型的物理應用格式[15],既有數據模型的精準定義,又有數據表達原則的詳細描述。此外,歐美還提出了OpenDRIVE[16]、lanelet[17]等格式,引領了高精地圖技術的發展和應用。國內地理信息標準化工作委員會、中國智能網聯汽車產業創新聯盟自動駕駛地圖工作組、中國智能交通產業聯盟等也開始著手相關標準制定工作,但進度相對滯后且需進一步協同立場,亟待整合測繪、汽車和交通全行業資源制定具有我國特色的行業統一標準[18]。
綜上,目前國內外都缺乏面向數據制作和交換階段的標準數據模型和表達方式。面對這一現狀,本文旨在設計一種通用化高精地圖數據模型,并選取最為常見的復雜工況——車道數變化場景,進行車道模型的構建與表達,再通過NDS編譯和ADASIS V3[19]應用試驗,驗證該模型的實用性和有效性。該數據模型可以作為一種高精地圖交換格式,也適用于指導數據生產和制作,從而建立連接高精地圖制作與應用的橋梁,同時也有利于推進高精地圖數據表達的標準化。基于該基礎模型,還可以持續擴展,以表達更多要素和應對更多場景。即該模型的通用性體現在3個方面:一方面可以作為通用的交換規格;另一方面可以應用到生產制作的各個階段;第3方面向下兼容、易于擴展。后續將分為高精地圖數據模型、車道模型、車道數變化場景下的車道構建、交通標志物模型、應用與試驗等5個部分進行介紹。
1 高精地圖數據模型
高精地圖數據模型是從傳統導航地圖數據模型發展而來。導航地圖一般使用線段(link)抽象道路,使用結點(node)抽象路口,從而構建起經典的點線拓撲模型[20-21],再使用Dijkstra或A*等算法,實現最優路徑規劃功能[22]。由于高精地圖表達的要素更為豐富,其數據模型比導航地圖更復雜,一般包括道路網、車道網、交通設施等數據內容的組織與表達[23]。如圖2所示,從左至右十字交叉路口的表達層次由淺入深,最右側的表達粒度達到了車道級。

圖2 不同粒度的地圖數據模型[24]Fig.2 Map data model with different granularity[24]
目前,國際主流地圖數據標準格式有OpenDRIVE和NDS,兩者在仿真、導航、自動駕駛等領域受到了廣泛應用。面向自動駕駛設計的lanelet模型也具有一定的代表性。下面將對這些主流數據模型展開詳細分析。
1.1 OpenDRIVE
OpenDRIVE是2006年發起的一種基于XML文件的開放數據格式,廣泛應用于仿真領域。OpenDRIVE以道路(road)為核心數據管理單元,車道(lane)、道路設施物(object)、標志(signal)等都掛載在道路實體之下,作為道路的附屬屬性。在幾何表達上,車道等附屬要素都以道路參考線為基準進行表達,而不是獨立表達。


圖3 OpenDRIVE格式車道模型[25]Fig.3 The lane model of OpenDRIVE format[25]
1.2 NDS
NDS格式廣泛應用于車載導航領域,其定義的高精地圖數據模型主要采用了車道組模型,將車道邊界線、車道中心線、車道拓撲關系都納入車道組的數據結構中,而沒有獨立的車道概念。NDS通過車道中心線前后連接的拓撲點表達車道拓撲關系。NDS雖然有獨立的數據圖層概念,分為道路(routing)、車道(lane)、地標(landmark)、障礙物(obstacle)等模塊,但是實際上非道路模塊(如車道模塊和地標模塊)必須通過關聯道路實體(link)才能得以表達。
因此,NDS格式的車道、地標等關鍵要素與道路實體的耦合程度很高,這主要是因為它是直接面向終端應用,高耦合的設計方便導航引擎通過道路快速獲取關聯的各類要素,從而提升數據使用效率。具備高耦合度的數據模型一般具備強格式的特點,需要復雜而專業的數據編譯過程才能實現格式轉換,逆向轉換或者轉換到其他格式都比較困難。同時也難以應用到數據采集與矢量化制作階段。
1.3 LaneLet
文獻[2]提出了可駕駛的車道區間概念lanelet,被應用到奔馳公司自動駕駛規劃系統。lanelets地圖包括lanelet、規則元素和駕駛走廊3個模塊。如圖4所示,lanelet是可駕駛的車道區間,由左右邊界構成,是lanelets地圖的最小單元;規則元素是關聯在lanelet上的交通規則信息,如交通信號燈、交通標志、路口交通規則等;駕駛走廊是有序的、接續的lanelet序列,是到達目的地的具體駕駛路徑。

圖4 Lanelet模型[19]Fig.4 Lanelet model[19]
第1代lanelet定義了一種輕量級的車道模型,駕駛走廊固定了車輛行駛的所有車道及變道位置。第2代lanelet[26]在第1代基礎上增加了更多要素,更加體系化,但同時也變得更加復雜。如圖5所示,在拓撲層,通過有向圖的方式定義了lanelet的連接關系,包括沿道路通行方向上的車道拓撲關系和垂直于道路通行方向上的車道鄰接關系,但兩者并未做區分。在關系層,定義了lanelet與規則元素的關聯關系,如與限速標志牌的關系。對于每一個實體,如lanelet、面(area)都由物理層的線和點構成。

圖5 Lanelet第2代模型[26]Fig.5 Lanelet 2 model[26]
Lanelet模型也是一種面向應用的數據模型,相對OpenDRIVE和NDS而言,具備獨立的車道概念,由左右車道邊界線構成。但lanelet模型并沒有抽出道路link概念,而只表達車道之間的拓撲關系。并且車道拓撲關系不僅包括車道通行方向上的前后連接關系,還包括允許變道的鄰接關系,因此構建的車道拓撲有向圖過于復雜,用于車輛變道時效率低下。
綜合考慮以上模型的優劣勢,提出通用性數據模型需具備的要求如下。
(1) 至少包含道路、車道兩級模型,道路與車道獨立表達,并建立關聯關系。
(2) 車道模型至少包括車道拓撲關系、車道左右邊界線、車道屬性等內容。
(3) 地標模型與道路、車道建立關聯關系,但是耦合度低,不需要依賴道路或車道表達,可以獨立表達形狀和屬性。
(4) 物理要素和虛擬要素分開表達。
基于以上要求,本文提出了一通用化的高精地圖數據模型,稱為Whu map model。其架構如圖6所示,采用面向對象的建模思想,即分圖層分要素的表達。主要分為3大模塊:車道模型、地面標志物、交通標志牌。同時也定義了道路模型,建立了道路與車道組之間的關系,但不作為要素的管理單元。道路模型沿用導航電子地圖的link-node模型,不做詳述。

圖6 高精地圖基礎數據模型Fig.6 A basic data model of HD maps
2 車道模型
車道模型是高精地圖數據模型中最重要的部分,對于自動駕駛應用而言至關重要。目前已經有高精地圖模型方面的理論與整體性研究[27],但尚缺少高精地圖車道模型方面的深入分析與研究。因此,本文在第1節的OpenDRIVE、NDS、lanelet等模型分析中也著重介紹了車道模型,一般至少包括車道拓撲關系、車道左右邊界線、車道屬性等內容的表達。本文設計的Whu map model車道模型包括車道組、車道、車道邊界線、車道中心線等4類要素,下面進行詳細描述。
2.1 車道組
(1) 車道組定義。車道組(lane group)是某一路段上垂直于道路通行方向上一個或多個車道構成的集合。車道組內車道數恒定、且所有車道屬于同一條道路、具有相同行駛方向。車道組的概念可以通過式(1)表達
(1)
式中,m為車道數;i表達第i個車道。在實際制作過程中,當路段上車道個數無變化時,將此路段上的所有車道編為一組,同時賦予相應的車道編號。當車道數量發生變化時,需要在變化的地方進行打斷,形成兩個不同的車道組。NDS格式采用了基于車道組的表達方法,如圖7所示,與本文定義的車道組概念一致。
(2) 車道組拓撲關系(lane group topo)。車道組拓撲關系表示前后連接的車道組之間的連接關系,如式(2)所示
LGT=(LGfrom,LGto)
(2)
式中,LG表示車道組;LGT表示車道組拓撲關系;LGfrom表示進入車道組;LGto表示退出車道組。以圖7為例,車道組0(lane group 0)作為進入車道組時,車道組1(lane group 1)是其退出車道組;車道組1作為進入車道組時,車道組2和3(lane group 2和lane group 3)都是其退出車道組。NDS沒有定義車道組之間的拓撲關系,而車道組拓撲關系對于計算車道拓撲、車道級路徑規劃具有重要作用,因此本文對這一部分內容進行了定義,并在后文車道拓撲關系構建中進行了實際應用。
2.2 車道
(1) 車道定義。車道組由車道組成,車道則是一個常用的概念,如式(3)所示
L=(dleft,dright,c,A)
(3)
車道通常指的是一個包含左右邊界線(即dleft和dright)、寬度大約在3.5 m左右的縱向行駛區間。當人駕駛車輛時,只需要左右邊界線作為約束即可實現平穩駕駛。而當自動駕駛時,只有左右車道邊界線是不夠的,還需要車道的中心線(即式(3)中c)來引領駕駛軌跡,減少實時計算量,實現平滑穩定的駕駛。此外,車道還具有各類交通屬性(即式(3)中A),如式(4)所示
A=(Atype,Adirection,Arestriction,Aothers)
(4)
式中,A表示各類交通屬性;Atype為車道類型;Adirection為通行方向;Arestriction為車道限制信息;Aothers為其他交通屬性。車道類型又包括:普通車道、HOV車道、應急車道、加速車道、減速車道、潮汐車道等。車道在交通維度的通行方向信息Adirection,其取值如式(5)所示
Adirection∈{s,l,r,sl,sr}
(5)
式中,s代表直行;l代表左轉;r代表右轉;sl代表直行加左轉;sr代表直行加右轉。車道限制信息包括限速、限高和限寬等。其他車道屬性還有車道連接類型(表達車道連接信息,如車道生成、車道結束、車道分離、車道合并等信息)、車道寬度等。
(2) 車道拓撲關系。車道拓撲關系與道路拓撲關系類似,表達車道之間的連通關系,可用于車道級的路徑規劃與導航[28]。其定義如式(6)所示
LT=(Lfrom,n,Lto)
(6)
式中,LT表達車道拓撲關系;Lfrom表示進入車道;Lto表示退出車道;n表達兩條車道的車道中心線交點(node)。Lfrom為空時,表示沒有進入車道;Lto為空時,表示沒有退出車道。車道拓撲關系還可以通過車道中心線及其首尾點構成的拓撲網來表達,兩種方式可以相互轉化。
2.3 車道邊界線
(1) 車道邊界線定義。車道邊界線d(divider)也稱為車道分隔線,通常是地面上的涂漆線,例如白色實線、白色虛線、雙黃線等。因此需要表達其形狀(dgeometry)、顏色(dcolour)、類型(dtype)等屬性(datrribute)信息,如式(7)、式(8)所示
d=(dgeometry,datrribute)
(7)
datrribute=(dcolour,dtype,dtraversability)
(8)
此外,屬性還包括車道線的可穿行信息dtraversability,例如實線不允許變道、虛線允許變道、左實右虛線只允許從右向左變道、右實左虛線只允許從左向右變道,如式(9)所示
dtraversability∈{Right_To_Left,Left_To_Right,Both,None}
(9)
(2) 車道邊界線拓撲關系。車道線拓撲關系可采用式(10)的方式進行表達
DT=(dfrom,dto)
(10)
式中,d代表車道線(divider);dfrom表示進入車道線;dto表示退出車道線。
車道邊界線拓撲關系一般較少直接面向終端應用,NDS和OpenDrive中都沒有相關定義。但在高精地圖制作過程中,車道邊界線拓撲關系可以作為中間成果用于車道拓撲關系的生成。基于人工智能深度學習的方法,除了可以提取車道線的形狀、線型等信息,采用有向非循環圖形模型(DAGMapper)還可以提取高速公路分叉合并處的車道線拓撲關系[29],如圖8所示左側所示。圖8右側為車道線拓撲關系展示圖,其中藍點是紅色箭頭所指的車道線d1與綠色箭頭所指的車道線d2交匯后的拓撲點,交匯后的車道線為d3,則交匯前后的車道線拓撲關系可以表達為(d1,d3)和(d2,d3)。

圖7 NDS基于車道組的表達模型[17]Fig.7 NDS lane group-based model[17]
2.4 車道中心線
車道中心線即車道的中心線(centerline),記為c,其表達式為
c=(nstart,nend,Cgeometry)
(11)
式中,nstart表示車道中心線的首點;nend表示車道中心線的尾點;Cgeometry表示車道中心線的幾何形狀,采用形點串的方式表達。
在自動駕駛中,車道中心線往往作為行車軌跡的承載體,因為這種方式可以最大化利用地圖的信息從而減少實時計算量。正因如此,車道中心線的表達需要保證合理、連通和平滑。在簡單場景下,車道中心線就是車道的幾何中心線,即左右邊界線之間的幾何中心線。但在車道數發生變化的場景,不能簡單采用幾何中心線作為每個車道的車道中心線,否則會產生車道中心線斷裂、距離道路邊緣過近等問題,影響自動駕駛使用,如圖9(b)所示。
3 車道數變化場景下車道模型構建
在實際制作和應用過程中,高精地圖面臨的最大的挑戰之一是車道數發生變化場景下車道模型的構建。對于沒有車道數變化的簡單場景,不存在車道中心線的匯合或者分離,只需考慮縱向上的連接,可認為是一個“一維”問題。而對于有車道數變化的場景,一般存在車道中心線的匯合或者分離,不僅需要考慮縱向的連接,還需要橫向上的連接,是一個“二維”問題。所以車道數變化場景是檢驗數據模型設計優劣的“試金石”,因此本節進行了重點討論。
為了生成如圖9(c)所示的車道中心線,首先需要參考合理的車道拓撲關系,保證拓撲上連接,然后基于空間約束條件生成平滑的幾何形狀。因此車道拓撲關系是生成車道中心線的前提和基礎,構建完整并且合理的車道模型的關鍵。基于本文定義的Whu map model車道模型,通過多種常見車道數變化場景下的車道拓撲構建,來驗證模型表達上的有效性和穩健性。

圖9 車道數變化場景Fig.9 An example of a lane number change scenario
車道數變化場景下車道拓撲構建架構如圖10所示。首先按照是否包含車道線拓撲進行場景的分類。對于包含車道線拓撲的場景可以直接用車道線拓撲去生成車道拓撲。對于不包含車道線拓撲的場景,再細分為有復合箭頭和沒有復合箭頭的場景,前者利用復合箭頭提供的通行方向信息生成車道拓撲,后者根據車道中心線航向角變化最小原則來生成合理的車道拓撲關系。

圖10 車道數變化場景下車道拓撲構建架構Fig.10 The architecture of lane topology construction in scenarios where the number of lanes changes
3.1 含車道線拓撲關系的場景
含車道線拓撲關系的場景指的是車道數發生變化的部分存在車道線匯合或分歧的拓撲連接關系。如圖11(a)藍色結點和紅色虛線所示,有2條進入的車道線和1條退出的車道線,表達車道數變化前的左三車道匯入變化后的左二車道。圖11(a)所示的場景是一種典型的車道線“兩線合一”場景,可以通過人工或自動化的手段提取出車道線拓撲關系。
基于可提取的物理存在的地圖要素,實現的車道表達如下:
(1) 車道組LG1
LG1={L11,L12,L13}
L11=(d1,d2,s)
L12=(d2,d3,s)
L13=(d3,d4,s)
式中,s表達車道通向方向是直行。
(2) 車道組LG2
LG2={L21,L22}
L21=(d5,d6,s)
L22=(d6,d7,s)
(3) 車道組拓撲(lane group topo)
LGT1=(LG1,LG2)
(4) 車道線拓撲關系(divider topo)
DT1=(d1,d5)
DT2=(d2,d6)
DT3=(d3,d7)
DT4=(d4,d7)
基于車道線所屬車道信息,再根據車道線的拓撲關系,可以生成車道拓撲關系。如上例所示,d3和d4都連接d7,而d3是L12和L13的邊界線,d4是L13的邊界線,d7是L22的邊界線,由此可知L12和L13合并匯入L22,車道拓撲關系(lane topo)如下
LT1=(L11,L21)
LT2=(L12,L22)
LT3=(L13,L22)
3.2 不含車道線拓撲關系的場景
不含車道線拓撲關系的場景,其特點是變化前后的車道形態不對齊、呈犬牙交錯狀,多見于城市道路場景。該場景下沒有明確的車道線拓撲關系,不能采取含車道線拓撲關系的方法進行計算。該場景又可以分為兩種子場景:一種是含有復合箭頭標識的子場景,可以利用復合箭頭表達的車道通行方向信息構建車道拓撲關系;一種是不含復合箭頭標識的子場景,根據車道中心線航向角變化最小原則,通過計算車道幾何中心線之間的夾角尋找最合適的車道連接關系。
3.2.1 有復合箭頭標識場景
如圖12(a)所示,車道數變化前左一車道有明確的直行和左轉箭頭,表明該車道可以連接前面的左轉車道和直行車道。因此,合理的車道拓撲關系和車道中心線表達如圖12(b)所示。雖然這種表達方式看似存在一定的缺陷,丟失了圖12(c)黃色線條所示的連接關系,即從下面的中間車道可以稍偏左邊向前行駛到左二的直行車道,但是卻能構建完整合理的車道模型。此外黃色線條表達直行信息也通過變化后的左三車道進行了表達,即左三車道允許變道到左二車道。如果以圖12(c)的表達方式來,在變化區間內會形成5條車道中心線,5條車道中心線需要對應5個車道,然后變化前是3車道、變化后是4車道,因此會產生車道中心線與車道對應不上的問題。因此,圖12(b)的表達方式滿足車道模型建立的要求,也可以滿足自動駕駛的應用需求。
對該場景下的車道線等物理存在要素提取,可生成不含車道拓撲關系和車道中心線的車道。再根據車道線的打斷位置,可以在橫向上生成車道組,如圖13所示,紅色方框內是車道組1,綠色方框內是車道組2。詳細可實現的車道表達如下。
(1) 車道組LG1
LG1={L11,L12,L13}
L11=(d1,d2,sl)
L12=(d2,d3,s)
L13=(d3,d4,r)
(2) 車道組LG2
LG2={L21,L22,L23,L24}
L21=(d5,d6,l)
L22=(d6,d7,s)
L23=(d7,d8,s)
L24=(d8,d9,r)
(3) 車道組拓撲
LGT1=(LG1,LG2)
根據車道的通行方向信息,可以生成車道拓撲關系。如上示例中,LG2比LG1多一個車道,LG1中的L11的通行方向信息是sl,即直行和左轉,LG2中只有L21的通行方向信息是L左轉,且其右一個車道L22是s,直行,由此可知,L11分歧出L21和L22。車道拓撲關系如下
LT1=(L11,L21)
LT2=(L11,L22)
LT3=(L12,L23)
LT4=(L13,L24)
3.2.2 無復合箭頭標識場景
無復合箭頭標識的場景如圖14(a)所示,此時除了可以將左一車道作為分歧車道,還可以將左二車道和左三車道作為分歧車道,如圖14(b)、(c)所示。為了保障自動駕駛汽車安全舒適地行駛,需要車道中心線盡可能減少航向角的變化。因此通過計算車道中心線的航向角,選取變化最小的結果表達拓撲關系。如圖15所示,首先計算出變化前后所有車道的幾何中心線,如紅線所示,然后對于變化后的每一條車道的幾何中心線,依次連接變化前的每一條車道的幾何中心線,如藍線所示,同時計算連接后形成的夾角,如黑色角θ所示(0<θ≤180°)。
θ越大,即越接近180°,表示航向角變化越小,車道中心線的角度變化也越小。所以對變化前后數量更多一方的每一車道,選取θ最大時連接的車道作為拓撲連接車道,如圖15黃色所示。所以合適的車道拓撲關系即圖14(b)所示。構成的車道拓撲關系如下
LT1=(L11,L21)
LT2=(L12,L22)
LT3=(L12,L23)
LT4=(L13,L24)
該表達原則仍存在不足之處,并沒有表達所有通行的可能性,下方的最左側車道依然可以行駛到上方的左二直行車道,而不是只能行駛到上方左一的左轉車道。但從幾何形態和駕駛體驗來說,航向角最大的方案是駕駛最平滑的方案。同時基于此模型,可以提前進行合理路徑規劃,規避上述問題。
3.2.3 混合場景
在城市道路場景中可能還會遇到更為復雜的車道變化路段,例如在同一個路段既有車道線拓撲關系的變化,也無車道拓撲關系的變化,如圖16(a)所示。此時需要進行分拆處理,首先根據已有的車道線拓撲關系構建該部分的車道拓撲關系。對剩下的部分采取無車道線拓撲關系場景下的處理。示例結果如圖16(b)所示。
4 交通標志物模型
4.1 地面標志物模型
地面標志物指的是地面上起到交通指示或傳遞某種交通信息的標志物,包括了地面箭頭、文字以及各類符號。如式(12)所示
R=(Rtype,Rboundingbox,Rsemantic,Rassociation)
(12)
式中,R表示地面標志物;Rtype表示地面標志物類型,如箭頭、文字、導流帶等。對于各類形態各異的地面標志物,一般采用矩形的包圍盒表達其輪廓。部分標志物具有明顯的語義信息,例如地面上的限速數字,以及標識公交車道或者應急車道的文字,因此需要預留表達語義信息的字段,式(12)中使用Rsemantic來表達。Rassociation表達地面標志物與道路、車道的關聯關系,將在4.3節進行統一描述。
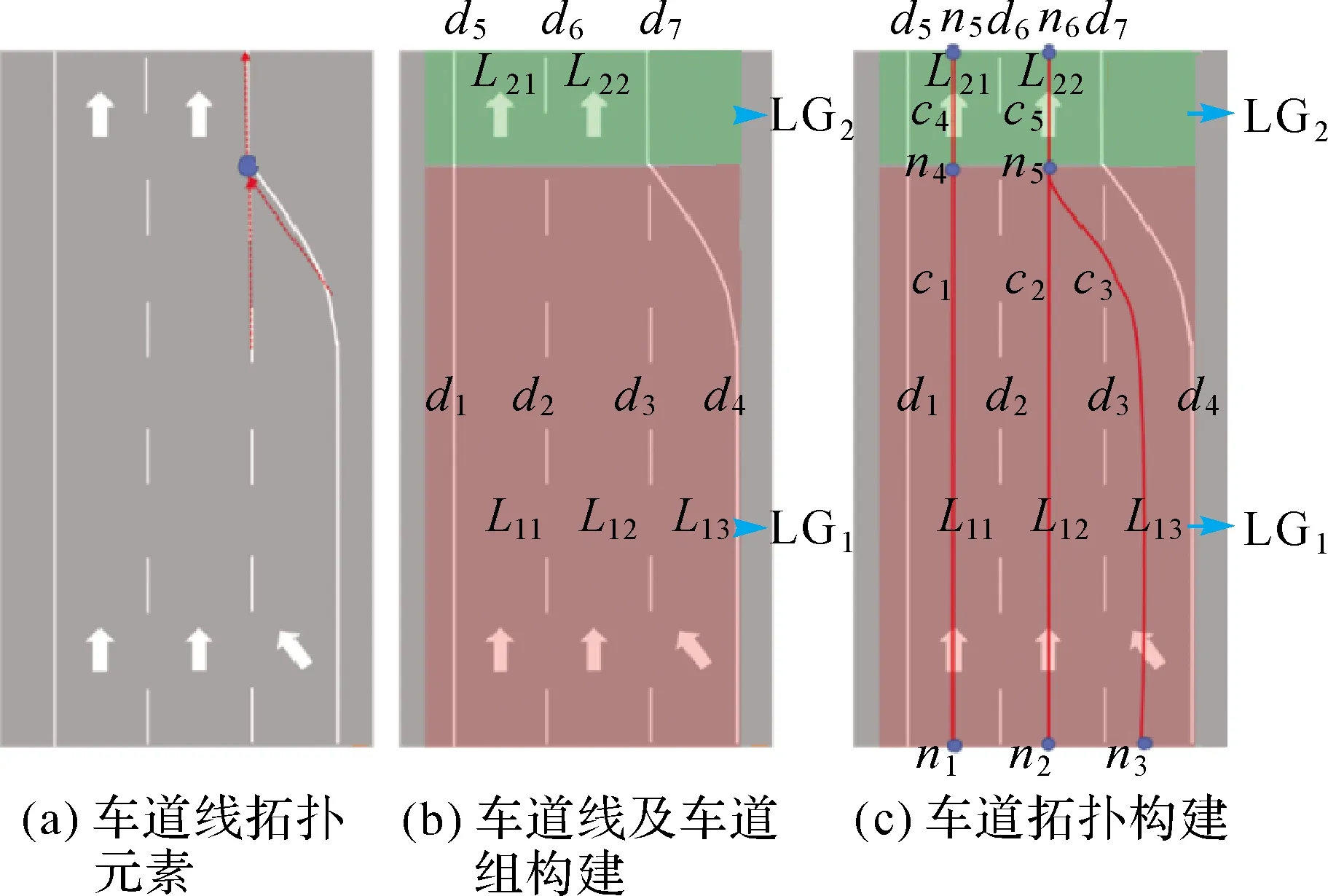
圖11 含車道線拓撲關系的場景Fig.11 The scenario with lane divider topology
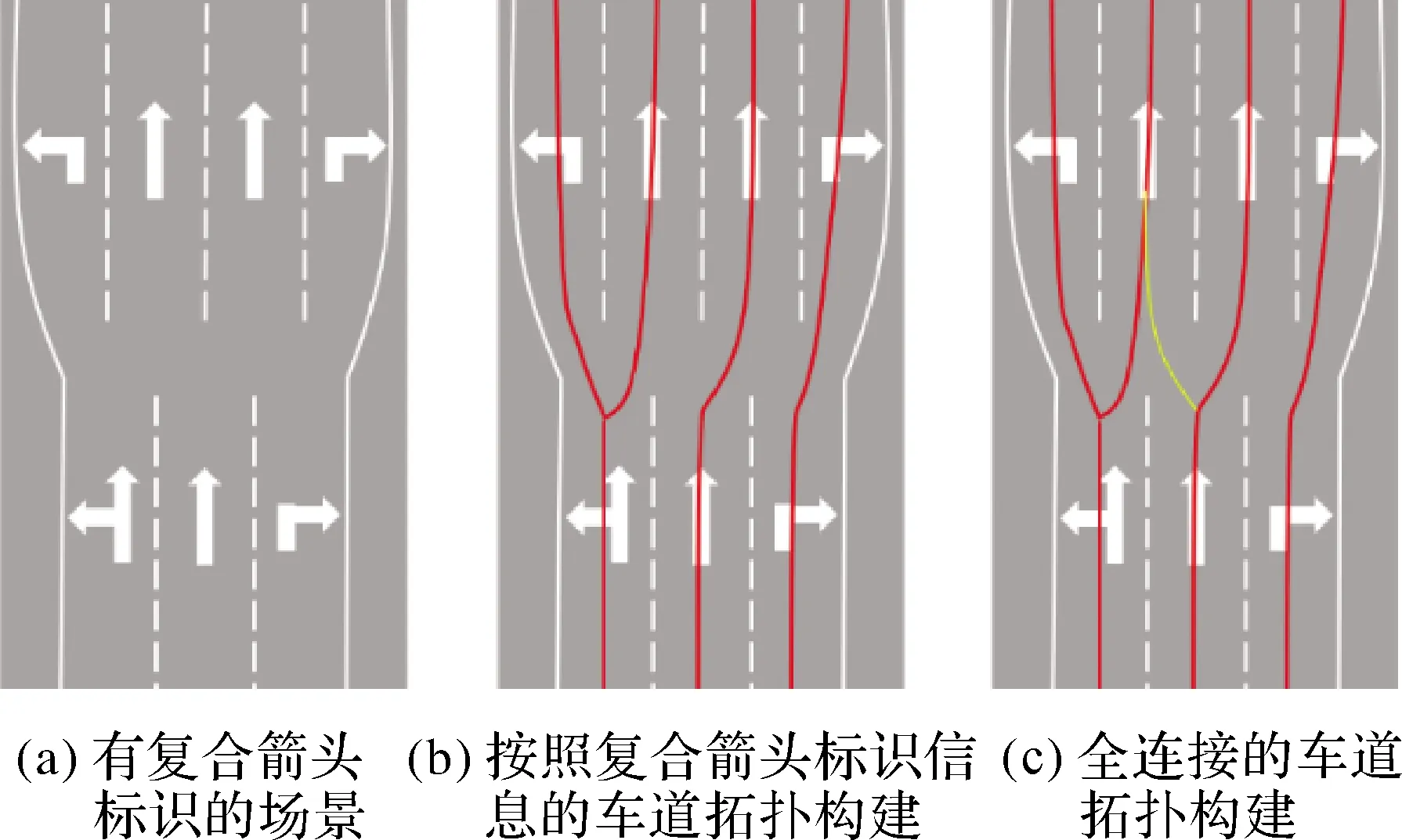
圖12 有復合箭頭標識的場景Fig.12 The scenario with compound arrows
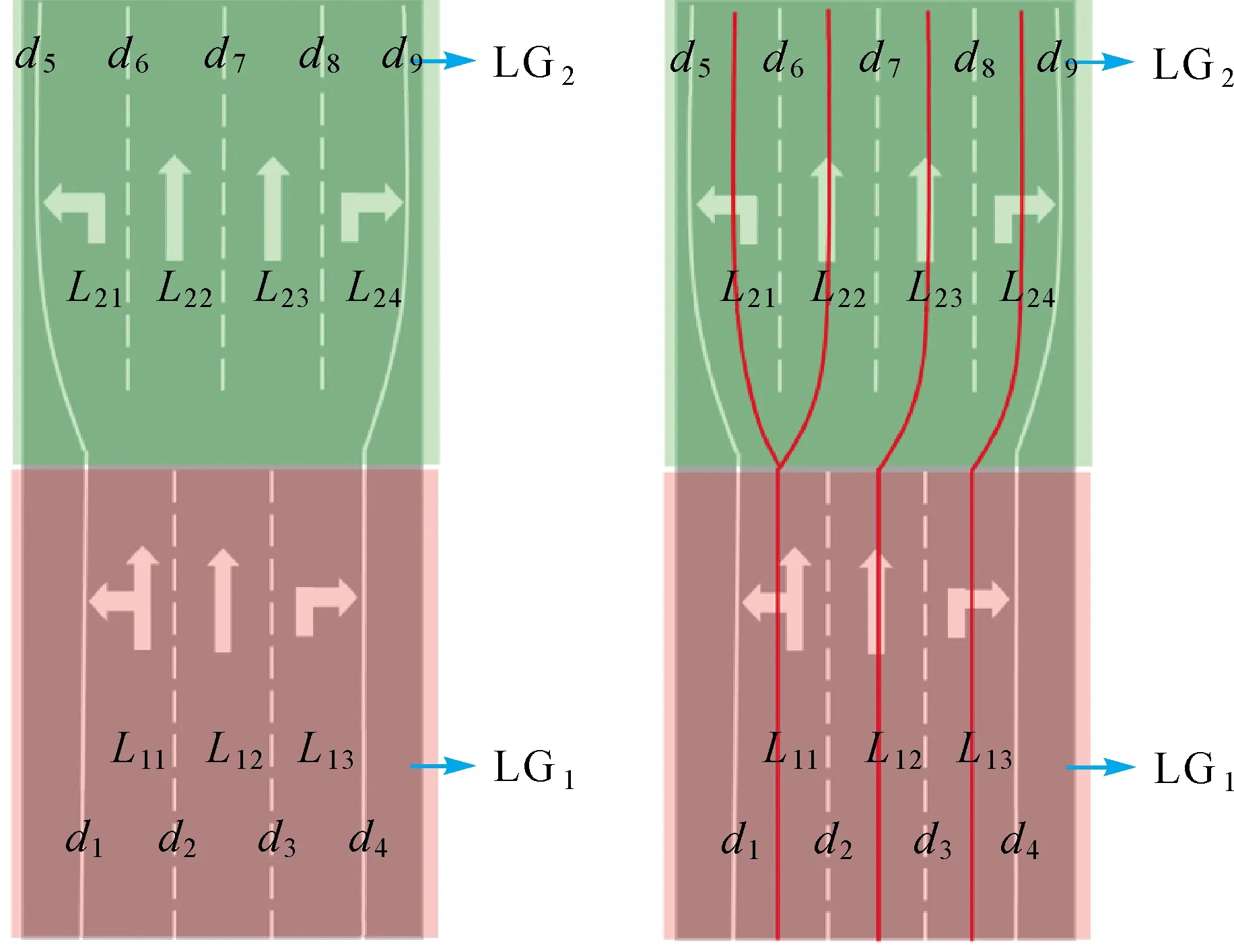
圖13 有復合箭頭標識場景的車道數據表達Fig.13 The lane data description of the scenario with compound arrows
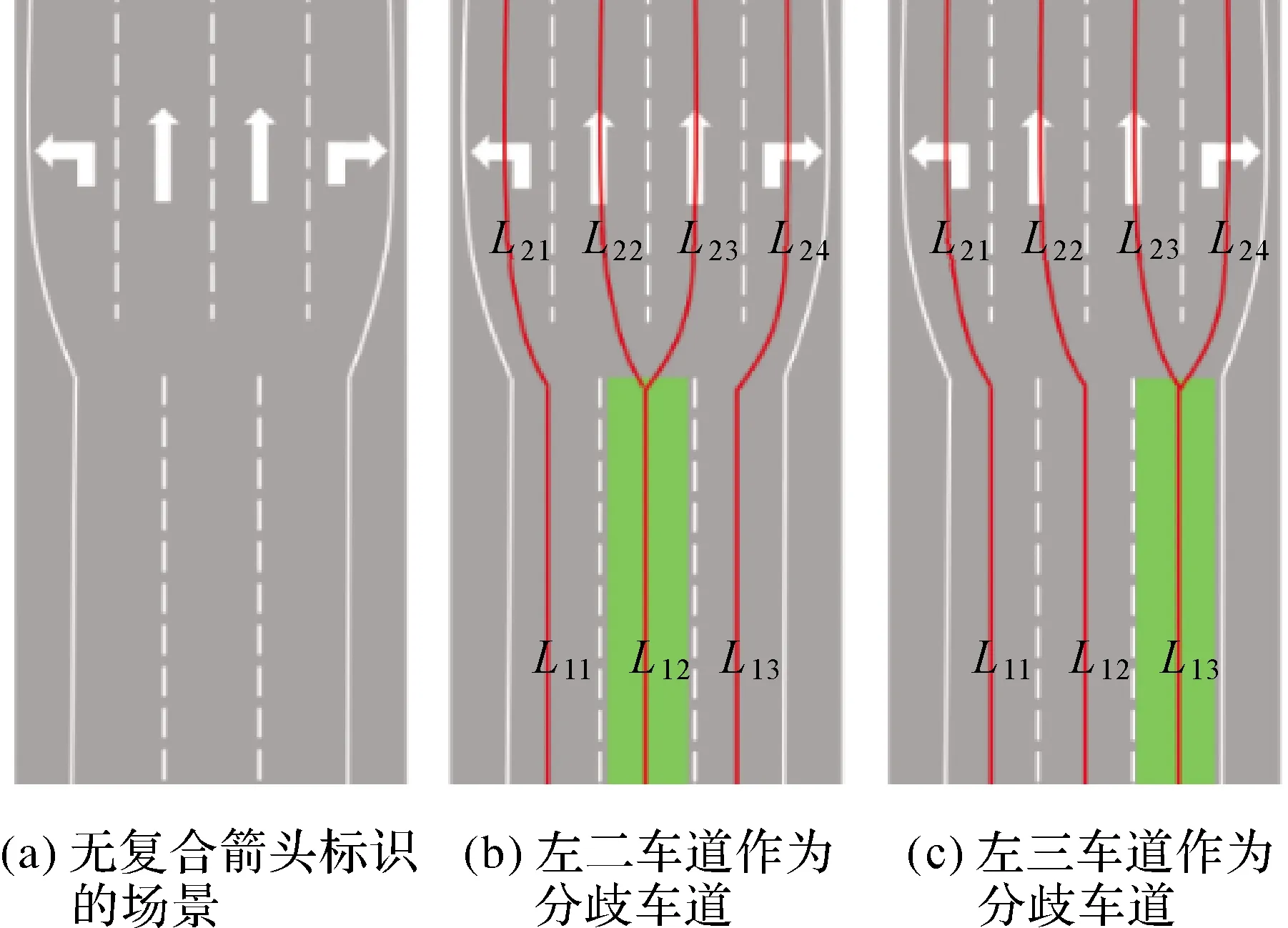
圖14 無復合箭頭標識的場景Fig.14 The scenario without compound arrows
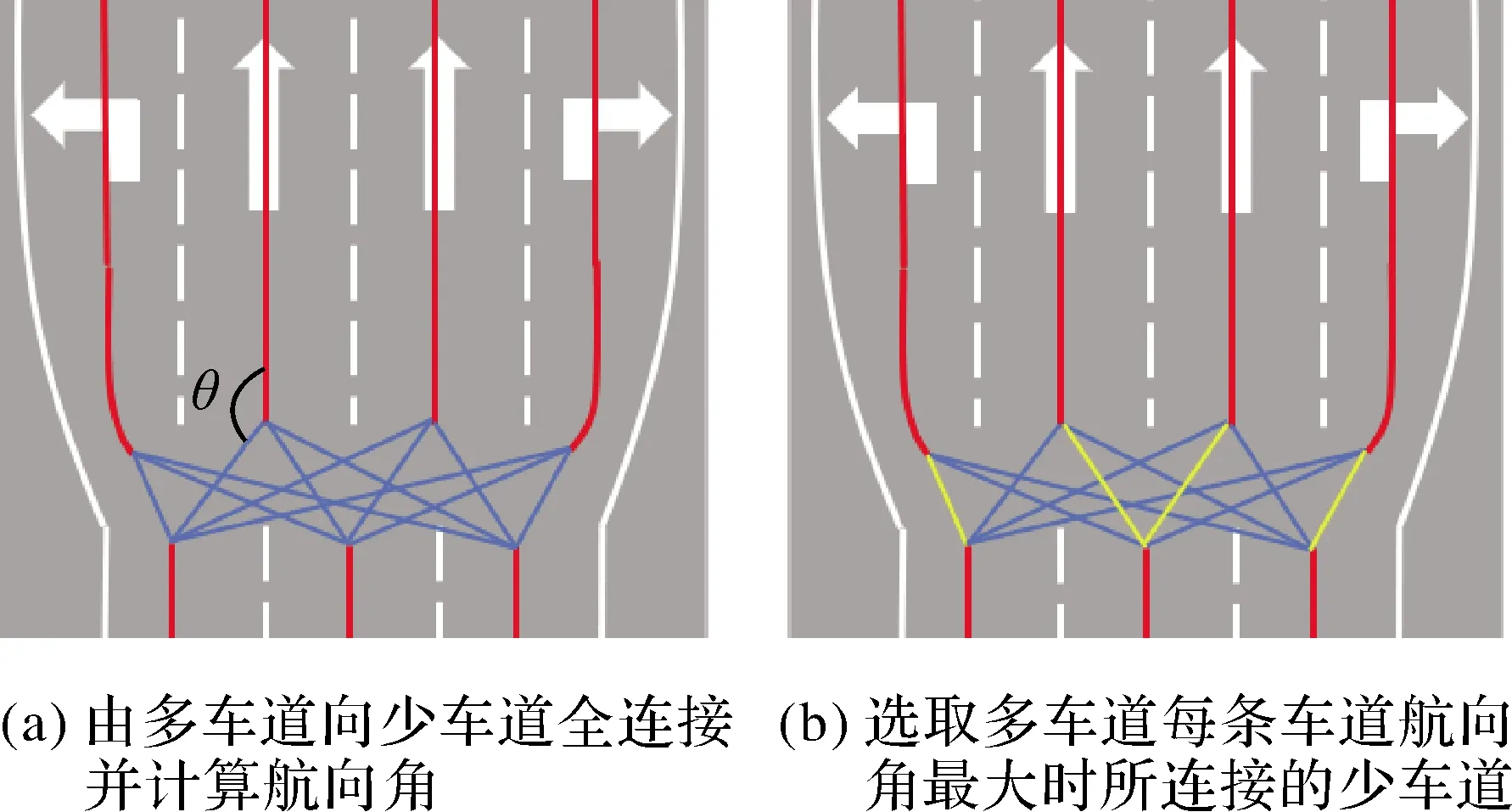
圖15 車道幾何中心線航向角計算Fig.15 The calculation of heading angles of lane geometric centerlines

圖16 混合變化場景Fig.16 Hybrid change scenario
對于包圍盒的表達包括兩種,一種是垂直于道路行駛方向的包圍盒,一種是基于地面標志物自身形狀的最小包圍盒。前者按要素的最外邊緣繪制出橫平豎直的矩形框,本文稱為坐標矩形框;后者需要參照要素的骨架線來構建最小外接包圍盒,本文稱為骨架矩形框。大多數情況下,兩者的表達是相同的。少數情況有所差異,如圖17所示,對于具有一定傾斜度的直箭頭,兩種包圍盒的表達有所不同。雖然兩種方式都具有擴大標志物實際范圍的效果,但顯然骨架矩形框擴大的范圍小于坐標矩形框。包圍盒作為高精地圖精細化表達方式之一,需要根據應用需求明確表達方式。例如為盡量避免矩形框擴大表達范圍而與車道線相交,應該選取骨架矩形框的表達方式。
4.2 交通標志牌模型
交通標志牌是道路交通中非常常見的交通信息承載體,為了方便駕駛員,一般設置在道路上方1~3 m之間。按照國標GB 5768《道路交通標志和標線》的定義[30],道路交通標志是以顏色、形狀、字符、圖形等向道路使用者傳遞信息,用于管理交通的設施。通過交通標志提供準確及時的信息和引導,使道路使用者順利快捷地抵達目的地,促進交通順暢和行車安全。本文提出的交通標志牌模型使用式(13)來進行表達
Msign=(Mtype,Msubtype,Mboundingbox,Msemantic,
Massociation)
(13)
式中,Msign表示交通標志牌;Mtype表達交通標志牌的類型,包括警告標識、禁令標識、指示標志、指路標志等;Msubtype表達詳細子類,國內約有100多種,如限速、禁止左轉、注意橫風等;Mboundingbox表達交通標志牌外接矩形框(即包圍盒)。隨著人工智能技術在激光點云和圖像融合感知方面的應用,標志牌矩形框的自動化提取效率不斷提高,如圖18所示。基于提取之后的外界矩形框,還可以通過中心點坐標結合長度、寬度或者半徑等的方式來表達交通標志牌的形狀。
Isemantic表達交通標志牌的語義信息。對于限速、限寬、限高等影響駕駛決策的標志牌,經常與時間段、車種、天氣等條件關聯,如圖19所示。為了準確表達其語義信息,采取式(14)的表達方式
Isemantic=(Irestrictiontype,Iroadtype,Icontent,Itime,Ivehicle,
Iweather)
(14)
交通標志牌語義信息包括限制類型Irestrictiontype、限制道路類型Iroadtype、內容Icontent、限制時間Itime、限制車輛類型Ivehicle、限制天氣Iweather等。
在圖19展示的場景中,還包括多塊交通標志牌聯合在一起表達的情況,如“限速120”“小型車”“限速40”“匝道”。為了支持該場景的表達,采用式(15)表達標志牌之間的關聯關系Ssignrelation
Ssignrelation=(Ssigni,Ssignj,Ssignrelationtype)
(15)
式中,Ssigni和Ssignj分別代表不同的標志牌。關系類型Ssignrelationtype分為包含關系Sincluding、組合關系Scombination等,如式(16)所示
Ssignrelationtype∈{Sincluding,Scombination,Sothers}
(16)
4.3 關聯關系
在自動駕駛中,僅依靠車輛傳感器來感知環境的另一個問題是,盡管傳感器通常能夠捕獲車輛周圍的道路交通設施,但很難確定該交通設施作用的對象和范圍。例如,攝像機可以在其視場角范圍內檢測到限速標志,但是該標志可能作用的是相鄰的另外一條道路。如圖20所示,雖然限速牌立在當前高速道路的右側,但實際上它表達的是右前方匝道的限速。又如在城市場景中具有多個交通信號燈的路口內,攝像機難以識別出每個交通信號燈實際控制的道路或車道。作為一種先驗知識,高精地圖可以預先制作每個車道的限速信息,或者建立限速標志、交通信號燈與道路、車道之間的連接關系。因此,通過高精地圖就能直接獲得每條道路每個車道的限速信息以及關聯的各種交通設施。
地面標志物和交通標志牌與道路、車道之間的關聯關系,通過式(17)表達
Tassociation=(Troad,Tlane,Tgeo_range,Teffect_range)
(17)
式中,Troad表示關聯的道路;Tlane表示關聯的車道;Tgeo_range表達關聯的地理范圍;Teffect_range表達作用范圍。地理范圍和作用范圍既可以是一個位置點,也可以是一個連續區間。如圖20所示,限速40的標志牌和右轉箭頭的輔助標志牌,它們的地理范圍即實際所在的地理位置,位于高速公路主路右側,作用范圍則是右前方的匝道。當出現關聯多條道路或者多個車道時,可以通過增加關聯關系的個數來表達。
5 應用試驗
為進一步驗證該數據模型的有效性,進行了大規模數據制作與應用試驗。首先,將基于該模型設計而成的高精地圖母庫規格,應用于自動化與人工作業結合的生產平臺,實現了大規模的高精地圖數據制作,數據場景涵蓋高速公路、城市道路、港口園區等各類場景。然后,基于該模型設計而成的高精地圖交換規格,以SHP格式數據文件為載體,生成高精地圖交換格式數據。考慮到NDS和OpenDRIVE作為物理規格應用的廣泛性,再將高精地圖交換格式數據編譯到NDS、OpenDRIVE格式,如圖21和圖22所示。最后,通過基于ADASIS V3標準的電子地平線試驗,驗證了數據模型的有效性。自動駕駛汽車需要從自車的角度來感知環境,為了將高精地圖應用于自動駕駛感知系統,需要從以地圖為中心的視圖切換到以車輛為中心的視圖,這種從行車視角獲取所需地圖數據的使用方式被稱為電子地平線[31]。電子地平線大大減少了需要傳輸的車道拓撲網絡數據量,從而可以有效地應用高精地圖。隨著車輛繼續前進,可以在刪除舊的電子地平線數據的同時,動態生成新的電子地平線數據。同時可以基于車道級路線規劃的結果來生成電子地平線。

圖17 地面箭頭的包圍盒Fig.17 Bounding boxes of road arrows

圖18 交通標志牌的包圍盒表達Fig.18 Bounding boxes of traffic signs
按照歐洲ADASIS協會定義的ADASIS V3標準,生成的電子地平線可視化如圖23(a)、(c)、(e)所示,紅色首尾點的白色線段是地面上的虛線,白色實線是地面上的白實線,兩者之間的灰色實線是車道中心線,紅色實線則是道路靠外側的應急車道線。由圖23(a)、(b)可以看出車輛在當前道路的最左側車道,前方道路地面上有印刷文字,地圖中采用青色矩形框表達其外輪廓。當車輛行駛一小段后準備變道,到達圖23(c)、(d)的位置,此時地圖數據發生增長。變道完成之后,又行駛了一小段距離到達圖23(e)、(f)的位置,地圖繼續增長以滿足自動駕駛感知需求。可以看出高精地圖數據很好地支持了基于車輛位置變化的電子地平線輸出。

圖19 復雜交通標志牌Fig.19 Complex traffic signs
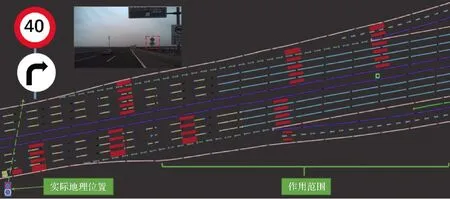
圖20 限速標志和指示標志組合使用Fig.20 Combination of speed limit sign and indication sign
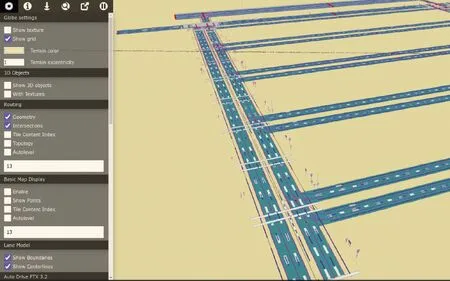
圖21 Whu map model數據模型編譯到NDS 2.5.4格式地圖Fig.21 NDS 2.5.4 map compiled from Whu map model

圖22 Whu map model數據模型編譯到OpenDrive 1.4H格式地圖Fig.22 OpenDrive 1.4H map compiled from Whu map model

圖23 電子地平線Fig.23 Electronic Horizon
試驗中,電子地平線硬件采用恩智浦S32V,進行了680多項測試,記錄了每個步驟的時間消耗,其平均值統計見表1。由表1結果可以看出,從接收需求到生成、傳輸,整個過程平均耗時小于100 ms,達到了實時應用的效果,同時也驗證了數據及軟件的可用性與有效性。

表1 基于ADASIS V3協議的高精地圖電子地平線效率統計
6 總 結
高精地圖已成為自動駕駛必不可少的基礎設施之一,但在數據制作和交換階段,尚未形成統一的數據模型和表達方法,制約了高精地圖的規模化發展與應用。針對這一問題,本文在分析和總結NDS、OpenDRIVE、lanelet等模型特點的基礎上,提出了一種通用化的高精地圖數據模型及表達方法。首先,車道模型方面,采用車道組為管理單元,將同一路段上相同行駛方向的車道歸為一組。車道組由車道構成,車道由車道的左邊界線、右邊界線、車道中心線、車道屬性構成。車道屬性包括車道的類型、車道限制信息等。當一個車道組的某個車道連接下一個車道組的某個車道時,可以通過表達進入車道和退出車道的車道對來構建車道拓撲關系。然后通過多種常見車道數變化場景下的車道拓撲構建,驗證了模型表達上的有效性。具體包括有車道線拓撲關系的場景、無車道線拓撲關系的場景以及兩者的混合類型。含有車道線拓撲關系的場景,可以應用車道線拓撲關系來生成車道拓撲關系;不含車道線拓撲關系的場景,根據復合箭頭提供的車道通行方向信息以及車道中心線航向角變化最小原則,來生成合理的車道拓撲關系。交通標志物的數據模型方面,主要定義內容包括類型、包圍盒、語義以及與道路、車道的關聯關系。最后,按照本文提出的數據模型,完成了大范圍的高精地圖數據制作,并且成功編譯到了NDS及OpenDRIVE等標準物理格式,同時應用到ADASIS V3電子地平線產品,取得了良好效果,進一步驗證了模型的實用性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
