大型裝配式建筑遠距離光電識別安裝定位系統研究
2021-12-10 10:22:20田亮
鐵道建筑技術 2021年11期
田 亮
(中鐵建設集團中南建設有限公司 湖北武漢 430000)
1 引言
截止到目前,我們國家在裝配式結構住宅的建設上已經取得了長足的進步,但是在其實施的過程中裝配式結構在實際的生產過程中依舊還有不少技術難題,因此目前這種施工質量不高。在這些技術難題中,特別是在實際施工過程中的豎向裝配式構件吊裝時的定位問題最為突出[1]。本文開發一種特殊的定位系統,協助裝配式豎向構件的安裝,達到安裝快捷、準確的目的。
裝配式結構所需的建筑構件需要提前在工廠完成加工,然后把施工所需要的結構構件運輸到施工場地,將各個結構構件用機械吊裝,再使用安全可靠的連接方式連接拼裝而成[2]。由于實際生產中使用了機械化的生產方式,施工的質量和效率都有比較大的提升,以往生產方式中的“脹包、開裂、滲水”等質量問題取得了較大的改善[3],再配合上裝配式裝修,在很大程度上提升了住宅房屋品質;另外一方面,這種綠色經濟環保,而且降低人力成本的生產方式也會取得很不錯的行業效益。
在以往的裝配式吊裝施工過程中,需要吊塔上的操作人員在吊塔上觀察豎向構件的大致位置,而且需要地面上的工作人員通過對講機實時指揮吊塔操作員進行吊裝作業[4],這一操作對施工人員要求較高,導致生產效率低,人員安全也得不到保障。因此我們設想通過高清攝像頭和超聲波光電傳感器等電子設備在塔吊設備和裝配式構件上的應用,讓塔吊操作員在電腦上能實時看見吊裝構件的具體位置以及構件離固定點的距離,這套系統很大程度上加快了施工速度,降低了操作風險,同時節省了人力[5]。
將該技術應用于裝配式建筑施工,一方面可以降低施工風險,保證施工質量;一方面可以優化施工模式,降低人力和施工運營成本,同時還響應了綠色節能的號召[6]。本文從系統框架、硬件設計、軟件設計以及數據處理等方面詳盡介紹了自主開發的新型定位系統。
2 系統設計
本裝置能夠為塔吊司機收集安裝裝配式構件所需的數據,提供可視化的模塊安裝場景、裝置的位置信息;并根據數據內容疊加在可視化內容上,繪出安裝導引線,輔助塔吊司機高效完成裝配式模塊的吊裝;也方便施工方對裝置進行管理。
本裝置也為塔吊司機提供了遠程手動控制裝置姿態的功能,拓寬了裝置的適用范圍,同時也可以通過更換攝像頭、傳感器的類型來適應某些特殊的應用場景,整體光電測量系統架構擁有很高的適用性[7]。
2.1 系統框架
本裝置由市電或電池供電,開機時進入整姿模式,先由核心微處理器開啟雙目攝像頭進行快速三維重構,找到接近畫面中央的中距墻面區域。通過微控制器驅動兩個整姿舵機改變本裝置姿態,使精密舵機與隨動的高精度激光傳感器的掃描范圍落入墻面,之后通過驅動精密舵機使激光傳感器對吊裝墻體橫向掃描,依據其數據確定機身姿勢后,再通過驅動兩個整姿舵機將本機調整至與所要吊裝墻面垂直的位置,并進入數據測量模式。
這套系統需要分別收集陀螺儀、激光傳感器和雙目攝像頭的數據結果,將數據傳輸到核心微處理器上。處理器首先利用攝像頭采集到的圖像信息進行三維空間的重構,從而得到視野各距離范圍的相對比例關系,而后結合陀螺儀、激光傳感器采集到的數據,將視野畫面上的點的距離數據,跟視野上識別的物體畫面相重疊得到最終的圖像,最終的圖像被圖傳部分通過無線的方式傳送到接收終端。
如果畫面中的視野不理想,塔吊司機也可從塔吊端通過接收裝置上的軟件發送控制指令來控制本裝置的橫縱姿態。本裝置分為兩個主要部分,一部分為吊裝現場測算裝置,另一部分為吊車控制臺。現場吊裝裝置框圖如圖1所示。
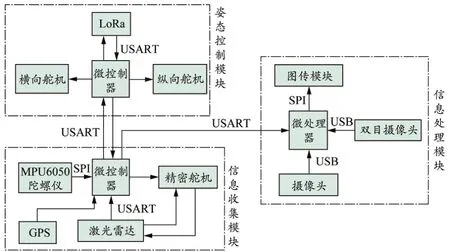
圖1 現場吊裝裝置框圖
2.2 硬件設計
本裝置具備便攜、智能等特點,其底部配備了一個三角支架。我們將其放置在地上時,裝置中各傳感器協同作用,控制云臺保持裝置水平,并自動檢測現場各類標定線的數據[8]。該部分一共包含了兩個子模塊來實現此裝置的監測目的:
(1)精密舵機、隨動激光雷達模塊與陀螺儀模塊
本裝置的云臺中搭載有一組精密舵機與隨動TOF激光雷達來測距。其測距的基本原理是通過測算發射激光信號與接受回波信號的飛行時間差,來計算目標物體與雷達的距離。此激光雷達能很好捕捉檢測目標(包括動態目標),誤差極小。通過精密舵機的轉向角度與激光雷達的返回數據相結合,進行范圍內的扇形掃描,根據三角算法獲得橫向角度偏移量以及相對目標的垂直距離。
云臺上安裝有兩個MPU6050六軸傳感器,采用高達400 kHz的IIC型通信接口,精度為0.1°,可以較為準確地測量當前裝置的傾斜角度。激光雷達測量的側向距離信息與MPU6050陀螺儀測量的角度信息返回給STM32單片機的主控芯片,操控云臺運動,實現裝置的姿態調整。
(2)橫縱向舵機云臺
本裝置采用三維、二自由度云臺,搭載了水平、垂直方向兩個自由度的舵機。選用HT垂直621CG磁感應技術無接觸式舵機,具有極高精度和分辨率。橫縱向舵機云臺實現了裝置在水平、垂直兩個方向的旋轉和定位,可以根據指令準確調整姿態,使裝置在正式啟用之前需對正標定板。
(3)視頻采集模塊
本裝配輔助裝置搭載KS型高清攝像頭,用以采集裝配現場的基礎視頻信號,這些視頻信息會跟采集到的距離信息相融合,視頻信息和距離信息組合成最終畫面,實時顯示畫面里物體的距離,并作為塔吊司機在接收端看到的主要畫面,向塔吊駕駛艙回傳。
采用精密舵機與隨動TOF型激光雷達進行標定實驗,可以獲得如上文所述的裝置到目標墻面的垂直距離,作為最初的距離數據,即攝像頭采集的畫面的數據基礎。其測距原理是:左右兩幅視圖上目標點的成像的橫坐標存在視覺誤差[9],橫坐標的視覺誤差的大小與目標點跟成像平面之間的距離成反比,從而極為準確地采集相對位置信息,如圖2所示。
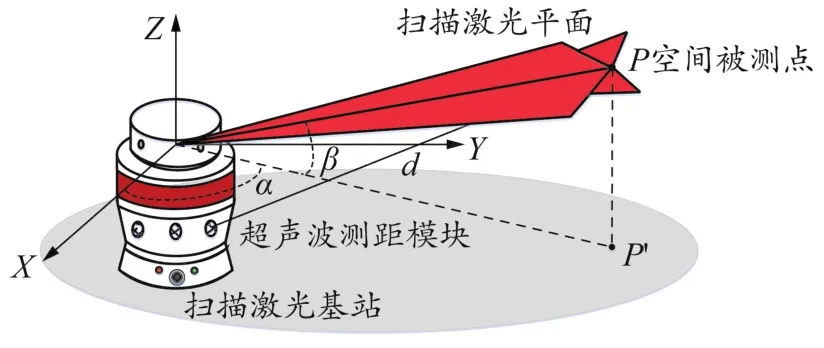
圖2 光電掃描的吊裝構件識別測試示意
3 軟件設計及數據處理
3.1 數據處理
數據處理采用了NanoPC T4嵌入式Linux型開發板,其搭載了RK3399型微芯片,該芯片采用大核加小核的架構,其中包括雙核Cortex-A72+四核Cortex-A53,處理器性能強勁,其內部還集成了Mail-T860 GPU,很大程度上提升了系統三維重構的效率,如圖3所示。
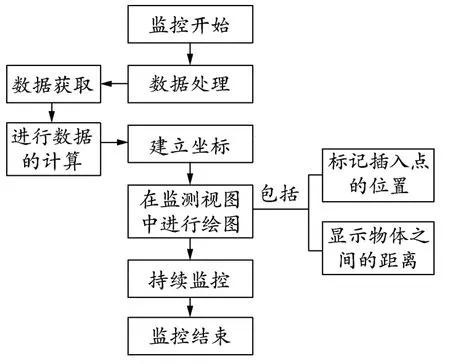
圖3 接收處理模塊系統流程
(1)雷達數據融合。以攝像機畫面為基礎畫面,結合高精度激光雷達的測距數據,在攝像機畫面中疊加激光雷達測量到的距離信息,便于對待裝配墻體進行高精度的實時測距。雷達數據融合演示圖,如圖4所示。
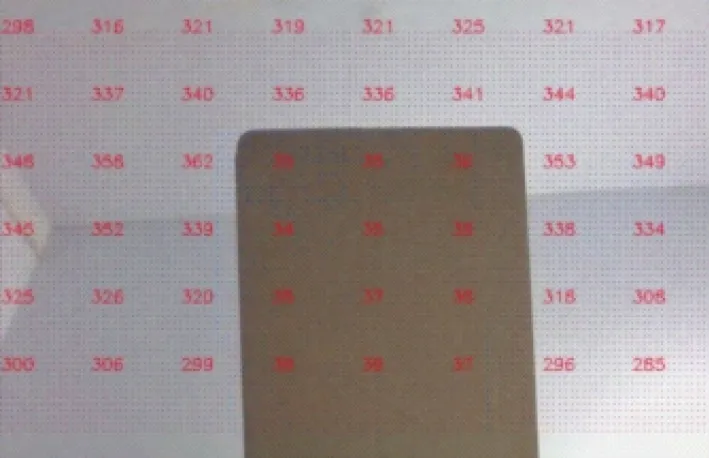
圖4 雷達數據融合演示
(2)墻體識別。將施工現場采集的圖片進行標定,使用標定后的圖片對目標檢測算法進行訓練。使用的yolo-V4 tiny系統算法能夠快速準確地在攝像機畫面中識別出待裝配的墻體,并對墻體距離進行實時測量。墻體識別示意圖,如圖5所示。

圖5 待裝配墻體識別示意
(3)三維空間定位。結合施工現場的空間信息和待裝配墻體的三維定位坐標[10],顯示器上能實時顯示出墻體在三維空間中位置。物體在三維空間實時定位示意圖,如圖6所示。
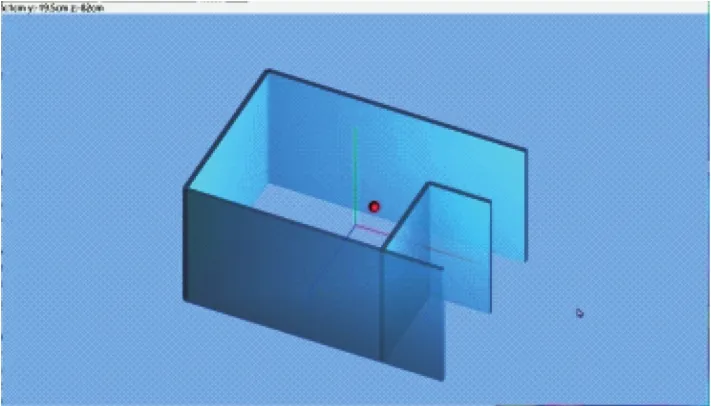
圖6 三維空間定位示意
3.2 數據與視頻圖像發送接收模塊
本模塊采用5.8 GHz圖像傳輸與4G或5G兩個模塊的傳輸,可將吊裝現場采集的圖像快速發送到吊裝操作人員的接收端上,并呈現在顯示器上。吊車司機可以通過接收端設備利用Lora遠程控制裝置的姿態。本模塊共用包含視頻信息傳輸和控制命令傳輸兩種無線傳輸模塊,來實現相應的功能:
(1)圖傳模塊
圖傳模塊采用5.8 GHz高速圖傳芯片,擁有32個頻道自動調頻,將吊裝現場采集并處理的圖像以10~40 ms的傳輸延時發送到司機的接收端。此圖傳模塊的工作范圍為3~5 km,支持720 p、1 080 p、2K圖像。
(2)4G或5G通信模塊
4G無線網絡通信模塊我們采用ATK-M750型無線網絡數據傳輸模塊,支持NET/HTTP/MQTT/RNDIS工作模式,我們通過架設云平臺服務器上傳下載實時視頻信息,可將延遲控制在43 ms延遲以內。
(3)基于Lora系統的433 MHz的低功耗雙向指令傳輸模塊。此模塊采用ATK-LORA-01型模塊作為數據收發器。我們將各傳感器采集上來的實時數據信息打包,通過Lora系統將信息從吊裝現場發送到司機接收端。經過處理后,數據將被呈現給吊車司機。此模塊傳輸距離大于3 km,具備低成本、低功耗、低延遲、遠距離的特點[11]。
3.3 吊裝現場的三維重構
三維重構技術的實現與否取決于采用怎么樣的匹配算法[12],我們需要利用立體匹配算法將攝像機采集到的二維圖像信息重構成三維圖像信息傳輸到計算機上,其步驟主要分為以下幾步:
(1)圖像獲取。利用攝像機將物體立體數據采集成平面數據。由于光照條件、相機的幾何特性等對后續的圖像處理造成很大的影響,攝像機傳感器選擇成像效果更好的CCD型傳感器。
(2)攝像機的標定。通過我們自己的實驗標定求解出攝像機的內外參數,利用采集的圖像信息進行深度匹配,進而獲取物體的三維空間坐標,從而實現三維空間的重構,將圖像進行三維重建。
(3)特征提取。以特征點為匹配基元,匹配算法采用BM算法,對比其他算法具有更快的運算速度[13]。
(4)立體匹配。利用上述算法所提取的特征來構建不同畫面之間的相應關系,將同一個物理點在不同畫面中的坐標對應起來。
(5)三維重建。利用以上方法將獲取的物體圖像重建成三維場景。
3.4 人機交互界面與嵌入式控制
人機交互界面在可視化界面中融入了多道智能測繪輔助線,在控制界面中加入了各類傳感器經過處理后上傳的吊裝配件三維信息,以數據的形式呈現在界面中。在界面的右上角我們還加入了吊裝現場GPS定位地圖,吊車司機可以通過此界面精確快速地控制吊車吊裝的方向以及距離。同時,司機可以通過遠程的無線方式操控本裝置的姿態,更便于司機對畫面的掌控。
4 結論
本文基于遠距離光電識別技術,設計開發了新型定位系統。硬件方面設計了精密舵機、隨動激光雷達、陀螺儀、橫縱向舵機云臺以及視頻采集等模塊。軟件方面設計了數據接收、數據與視頻圖像發送接收、現場三維重構等模塊。該系統具有操作便捷,定位準確,并針對吊繩長度、載重質量變化有良好的適應性,性能可靠等優點,可實現裝配式建筑施工的智能化運營,對推動裝配式建筑的發展具有積極意義,使用前景也十分廣闊。