智能車輛換道潛在沖突分析與風險量化方法*
2021-12-11 13:18:32陳吉清翁楚濱蘭鳳崇
汽車工程 2021年11期
陳吉清,翁楚濱,蘭鳳崇
(華南理工大機械與汽車工程學院,廣州510640)
前言
智能車輛行駛在多車道的道路上時,其智能系統常須控制車輛進行車道變換動作。這個過程往往涉及執行車輛與多車道車輛交互行為,因而是一個具有較高碰撞風險的行駛動作。如果產生不安全的換道行為,不僅使交通流受到影響,造成交通擁堵,還易導致交通事故的發生[1]。因此,在智能車輛執行換道前,進行換道安全評價,為換道決策與規劃提供輔助信息,以實現智能車輛的安全換道,顯得尤為必要。
從本質上來講,換道是一種交通行為,因而換道安全評價也是交通安全評價研究領域的一個分支。以交通事故數據為支撐,從交通事故的微觀行為角度出發,探討交通風險產生的根本因素,是研究交通安全評價最為直觀有效的路線。Ferreira等[2]利用歷史碰撞數據研究了交通安全評估方法,主要涉及碰撞頻率和嚴重程度的推導。這一研究路線的深入探索對交通統計數據的要求很高,然而交通事故的發生頻率較低,且具有隨機性,導致樣本數據不足,難以得出正確的統計規律,這給交通事故數據的采集帶來很大困難。為此,有學者提出交通沖突的概念,并總結了交通沖突技術[3]。該技術基于傳感器與通信技術,在事故發生前觀測大量非事故數據,通過分析車輛的軌跡數據來得到與事故高度相關的危險動作,具有“大樣本、短周期、小區域、高信度”的統計學優點[4],受到了相關領域的廣泛重視。
基于交通沖突理論,學者對換道行為的安全評估展開了大量研究。Park等[5]提出變道風險指數(lane change risk index,LCRI)來評估被試車輛變道時的碰撞風險,并將故障樹分析(fault tree analysis,FTA)應用于評估框架。Zheng等[6]提取左轉車輛與直行車輛之間的碰撞時間(time to collision,TTC)和后侵入時間(post encroachment time,PET),采用二元極值模型整合交通沖突指標對事故進行估計。容穎等[7]采用TTC和PET等指標,建立了雙車道高速公路車輛運行風險評估模型。Oh等[8]使用二元logistic回歸對變道決策進行建模,估計軌跡是否變道的概率,結合指數衰減函數和TTC,評估碰撞概率。Weng等[9]分別使用避撞減速率(deceleration rate to avoid the crash,DRAC)和Delta?V計算碰撞概率和嚴重程度,并將它們作為變量之一,進行道路工作區域的車輛并道行為建模。周斌宇[10]結合TTC和制動避險時間(time to aviod,TTA),綜合分析兩者關系,建立了危險系數以便對換道碰撞危險程度進行量化,并應用于車輛安全換道預警機制的設計。何愛生[11]以TTC為指標,考慮目標車道后車輛減速度變化建立了安全換道模型,并根據不同的換道動作設置相應的換道預警閾值。楊俊[12]定義了頻繁換道行為,并通過標定TTC和PET的閾值,對車輛軌跡進行沖突分析,以頻繁和非頻繁換道的沖突數作為評價指標來量化頻繁換道對交通安全的影響。王暢等[13]基于真實人員的換道安全性決策數據,分析了不同時刻的TTC特性,并由此確定了不同級別換道預警規則的TTC閾值。
當前的換道安全評估研究主要針對如何基于交通沖突指標衡量換道過程的碰撞概率,缺乏綜合考慮碰撞可能性與碰撞嚴重程度來量化碰撞風險的研究。在研究視角方面,多將換道視為一個整體過程,未考慮在換道的不同階段車輛所面臨的風險來源的差異。另外,由于缺乏大量有效的自然駕駛數據的支持,許多評估方法僅提供了思路,對所構建的安全評價方法的客觀性未進行充分的分析與探討。
從交通安全的角度來看,車輛換道的風險主要從該軌跡可能導致的交通事故帶來的人或車的損失進行衡量。本文基于潛在沖突分析,對車輛在不同階段與周圍車輛的潛在沖突形式進行分析,從碰撞可能性與碰撞嚴重程度兩個方面建立換道的綜合風險量化方法,并利用自然駕駛軌跡數據集對方法進行量化驗證。在缺乏有效的真實換道事故數據的情況下,探尋客觀科學地對換道軌跡進行風險量化的方法,以幫助實現智能車輛更安全的換道。
1 換道潛在沖突形態分析
何仁等[14]將換道過程劃分為3個階段,即準備階段、執行階段和后調整階段[14];本文中為便于區分不同階段主車與原車道和目標車道的關系,將換道過程分為準備階段、跨道階段和回正階段,每個階段有對應的軌跡階段。一般來說,準備階段是指駕駛員產生換道意圖后,觀察周邊車輛的運動情況,打開轉向燈,并隨時準備換道的階段;跨道階段是指駕駛員轉動轉向盤,使車輛在前進的同時進行橫向位移,直至整個車輛移出初始車道,進入目標車道的階段;回正階段則指駕駛員往相反方向轉動轉向盤,使車輛在目標車道上回正,同時對車輛與車道線的間距進行微調的階段。其中,按車輛整體是否越過車道線為分界點,來劃分跨道階段和回正階段,如圖1所示。圖中紅色曲線為換道過程車輛中心(車輛外接長方體的質心)軌跡在地面的投影。下面按3個階段對主車與不同旁車的潛在沖突進行分析。

圖1 換道階段劃分
在換道準備階段,為調整縱向位置,以便執行換道動作,該階段駕駛員往往會存在加速或減速的動作,因而可能會與原車道的前后車發生追尾碰撞,潛在碰撞形式如圖2所示。

圖2 換道準備階段潛在碰撞形式
跨道階段,主車駕駛員轉動轉向盤,使車輛從原車道向目標車道移動。在此階段,主車可能與鄰后車、鄰前車發生側向碰撞,也可能與前、后車發生追尾碰撞,如圖3所示。

圖3 跨道階段潛在碰撞形式
在回正階段,車輛整體已完全越過了車道線,正進行車輛的回正和橫向位置的微調。在此階段,主車與原車道的兩車基本已沒有沖突風險,只存在目標車道前后車的追尾碰撞風險,如圖4所示。
圖4 回正階段潛在碰撞形式
綜上所述,換道階段主車與不同旁車的潛在沖突形式如表1所示。以TTC為度量指標的先決條件是交通參與者存在預定碰撞軌跡,即以當前的車速(后車速度比前車快)和方向行駛,根據幾何計算,必然會發生碰撞。由于預定碰撞軌跡的假設并不能完全識別換道過程的風險[15],易遺漏跨道階段的側面碰撞風險,因此在選用度量指標時,應選擇不依賴于預定碰撞軌跡的度量指標來估計換道風險。

表1 換道各階段旁車與主車潛在沖突形式
2 換道風險量化方法的建立
換道風險量化方法的整體思路可分為3個步驟:首先從微觀角度出發,對每一個時刻點的換道車輛與某一旁車的沖突風險進行量化;隨后從整條換道軌跡的所有時刻點沖突風險中進一步提取宏觀風險特征;最后通過系統性風險分析,量化換道車輛與所有旁車的風險值。
2.1 微觀沖突風險指標
微觀沖突風險指標須滿足以下兩方面的作用:①對某一時刻,主車與某一旁車是否存在換道沖突進行判別;②能有效區分不同沖突形態對車輛可能帶來傷害的不同程度。單一的風險指標難以實現上述目標。為充分考慮換道過程的非預定碰撞軌跡交通沖突,選用不基于預定碰撞軌跡假設的停車距離指數(stop distance index,SDI)來作為主車與某旁車是否存在換道沖突的判別指標;同時,考慮不同側面碰撞角度帶來的不同后果,基于沖突能量判別法推導得到損失能量指數(loss energy index,LEI),由此衡量沖突可能對車輛帶來的傷害嚴重程度。
2.1.1 停車距離指數
停車距離指數是根據停車視距(stopping sight distance,SSD)來確定車輛碰撞風險的指標[16]。它指的是同一車道上,車輛行駛時遇到前方障礙物而必須采取制動停車時所需要的最短行車距離[17]。在如圖5所示的典型同向雙車道5車換道場景的某一時刻t,主車的停車視距為

圖5 5車換道場景主車與周圍車輛的定義

式中:S1,M(t)為t時刻駕駛員反應時間內車輛行駛的距離;S2,M(t)為t時刻開始制動汽車到汽車完全停止所行駛距離;vM(t)為當前時刻的主車車速,km/h;f為路面與輪胎的縱向摩擦阻力系數,取決于路面情況與輪胎的材質、紋路、磨損程度等;tr為駕駛員的反應時間,一般取2.5 s;Ss為安全距離,一般在使用停車視距直接作為制動決策的依據時需要設置,本研究將其用于風險的量化判斷,為使量化結果更為直觀,Ss取0。基于主車與前車的停車視距,某一時刻的主車與前車之間的停車距離指數為

式中:SSDFO(t)、SSDM(t)分別為t時刻前車CFO和主車CM的停車視距;lM,FO(t)為t時刻前車CFO與主車CM的間距。若SDIM-FO(t)不為正值,說明當前車突然全力制動時,主車無法進行適當的操作來避免與前車相撞,兩車存在碰撞風險。據此,將SDI值是否小于0作為主車與相應的旁車存在沖突的判別標準。與式(2)的推導過程同理,主車與后車、主車與鄰前車、主車與鄰后車的停車距離指數為
式中:SSDRO(t)、SSDFT(t)、SSDRT(t)分別為t時刻后車CRO、鄰前車CFT和鄰后車CRT的停車視距;lM,RO(t)為t時刻后車CRO與主車CM的間距;lM,FT(t)為t時刻鄰前車CFT與主車CM的間距;lM,RT(t)為t時刻鄰后車CRT與主車CM的間距。
2.1.2 損失能量指數
沖突能量判別法是根據在交通沖突發生時,如果不采取避險措施會產生的碰撞傷害能量的大小進行嚴重交通沖突的判別[18]。在遭遇典型碰撞事故時,車輛的碰撞能量計算模型可以從力學的角度,通過動能和動量守恒定律等進行推導。由換道潛在沖突形態可知,在同向雙車道車輛換道場景中,各車輛整體同向行駛,兩車航向夾角遠小于90°,在該場景中主要出現追尾碰撞和側面碰撞兩種可能。
(1)追尾碰撞能量模型的建立
以車輛行駛方向為正向,兩車追尾碰撞前后的速度變化如圖6所示。其中前車質量為m2,碰撞前后速度分別為v2、v′2;后車質量為m1,碰撞前后速度分別為v1、v′1。

圖6 追尾碰撞速度方向變化示意圖
當兩車發生碰撞時,根據能量守恒定律,碰撞損失能量為

忽略碰撞瞬間兩車的地面摩擦力,根據動量守恒定律可得

碰撞恢復系數e為

由式(7)和式(8)可以將碰撞后的速度寫為

將式(9)和式(10)代入式(6)化簡得到追尾碰撞損失能量為

(2)側面碰撞能量模型的建立
車輛不同位置的剛度不同,車輛發生側面碰撞時所產生的能量轉移在一定程度上受碰撞位置的影響。由于當前的軌跡預測技術尚未能對碰撞位置進行較為精確的預測,且考慮碰撞位置會大幅增加模型推導的難度,本研究忽略碰撞位置的影響,假設換道過程的跨道階段可能發生的潛在側面碰撞均為側面向心斜碰撞,即發生沖突碰撞兩車的質心連線與主撞車適度矢量在一條直線上。對向心斜碰撞單純分析其受力方向與速度方向的變化均較抽象,因此將側面向心斜碰撞分解為側面向心正碰撞與追尾碰撞的組合碰撞,如圖7所示。車輛的沖突碰撞形式被分解為主撞車1和主撞車2分別同時沖突碰撞的形式,其中主撞車1的初始速度為v1x=v1sinθ,主撞車2的初始速度為v1y=v1cosθ。

圖7 側面向心斜碰撞運動分解示意圖
主撞車1與被撞車的側面向心正碰撞的速度變化示意圖如圖8所示。根據能量守恒定律可得側面向心正碰撞的損失能量:

圖8 側面向心正碰撞前后瞬間兩車的速度變化示意圖

忽略碰撞瞬間兩車的地面摩擦力,由動量守恒定律可得

由矢量關系有:

碰撞恢復系數為

聯立式(12)~式(15)可得側面向心正碰撞的損失破壞能量為

按照式(11),分解得到的追尾沖突碰撞能量可以寫為

式中e2為所分解的追尾碰撞的碰撞恢復系數。
由式(16)和式(17),側面向心斜碰撞的碰撞損失能量可以寫為

(3)損失能量指數的定義
碰撞損失能量越大,并不意味著碰撞對車輛造成的損傷越大。對于車輛來說,還要結合車輛自身能承受的能量來分析。車身所能承受的碰撞能量與車輛的質量有關,質量越大,所能承受的碰撞能量也就越大。因此,采用碰撞損失能量與車輛自身質量的比值來衡量碰撞嚴重程度,稱為損失能量指數LEI。碰撞恢復系數e與參與碰撞車輛的車身材料有關,為便于計算,將車輛均假設為剛體,則所發生的碰撞是完全非彈性碰撞,e取為0。追尾碰撞的損失能量指數可以寫為

式中rm表示主撞車與被撞車的質量比。當它越大,主撞車的損失能量指數越小,則主撞車的碰撞嚴重程度越小。同理,側面向心斜碰撞的損失能量指數為

對比式(19)和式(20)可知,當側面碰撞的夾角θ為0時,側面碰撞與追尾碰撞LEI的計算公式相同。因此,也可以把追尾碰撞看成是夾角θ為0的側面碰撞,則損失能量指數的計算公式可統一為

式中:LEI(t)表示t時刻的兩車損失能量指數;v1(t)、v2(t)分別表示t時刻兩車的速度;θ(t)表示t時刻兩車的航向角夾角,若潛在碰撞形式為追尾碰撞,則θ(t)默認為0。
2.2 宏觀換道風險特征
沖突風險指標定義了微觀層面上的風險,即某一時刻主車與某一旁車之間存在的換道沖突風險。為從宏觀的層面表征整個換道時域內的主車與某一旁車之間的沖突風險,在沖突風險指標數據中進一步提取兩個統計特征,稱為風險暴露水平(risk exposure level,REL)和風險嚴重程度(risk severity level,RSL),進行進一步的宏觀量化。
2.2.1 風險暴露水平
風險暴露水平REL用于衡量整個換道過程,主車與某一旁車發生碰撞的可能性。為對REL進行定義與計算,首先對風險暴露狀態δ進行定義。按圖1所示的換道軌跡劃分方法,在不同的換道階段內,對不同位置的旁車是否處于風險暴露狀態的定義有所不同。由表1可知,原車道的前車CFO和后車CRO只在準備階段和跨道階段有與主車發生追尾碰撞的風險,因而CM與CFO、CRO之間的風險暴露狀態為

式中:δ(t)=1表示CM處于風險暴露狀態,δ(t)=0表示CM未處于風險暴露狀態。顯然,只有當時間幀t處于換道準備階段(T0≤t≤T2),且SDI不大于0時,才認為CM與CFO、CRO之間處于風險暴露狀態。
同樣由表1可見,目標車道的前后車CFT和CRT在換道的跨道階段有與主車發生側向碰撞的風險,在換道的回正階段,有與主車發生追尾碰撞的風險。雖然在換道跨道階段,兩車并非在每一時刻t都與主車處于相同的車道,但主車的運動趨勢是在向目標車道逼近,因此認為在此階段內的兩車與主車之間的SDI不大于0時,有發生側向碰撞的風險。CM與CFT、CRT之間的風險暴露狀態為

當換道時長相同時,處于風險暴露狀態的時間越長,主車與相應的旁車發生碰撞的可能性也就隨之增加。因此,將定義REL為CM處于風險暴露狀態的時間占換道總時長的比值,相應的計算公式為

式中ΔT表示換道總時長。顯然,REL的取值范圍為[0,1]。
2.2.2 風險嚴重程度
風險嚴重程度RSL用來衡量整個換道過程中,主車與相應位置旁車的潛在沖突風險的嚴重程度。對所有δ(t)=1的時刻使用式(21)計算損失能量指數,若潛在碰撞形式為追尾碰撞,潛在碰撞夾角θ為0;若潛在碰撞形式為側面碰撞,潛在碰撞夾角θ用兩車的航向角夾角近似代替。得到每一風險暴露時刻的損失能量指數后,RSL用車輛可能發生的碰撞最大損失能量指數來衡量,并進行歸一化處理,以保證RSL和REL具有相同的取值范圍,其計算公式為

式中:LEImax為整個換道軌跡的最大損失能量指數;N(·)為歸一化函數。最常用的方法之一是minmax歸一化,但該方法的計算需要提前得到變量的理論上限值與下限值。LEI的理論下限值是0,理論上限值難以推導。且由于自然駕駛軌跡本身的特性,采用min-max歸一化的結果可能會過多地集中于低風險區間,不便于不同換道軌跡之間的風險值對比。
為使歸一化后的RSL能有效區分不同樣本的風險區間,采用一種基于統計百分位的非線性歸一化方法。該方法求解LEI→RSL的映射關系,從定義域[0,+∞),映射到[0,1]的值域上。該方法映射過程不是簡單的線性關系,而是通過函數變換使映射值在值域的分布情況不同于原值在定義域的分布,而最終RSL的統計分布相對平均。將映射分為兩步進行,第一步的映射關系設為

該步映射主要改變統計分布,y的值域仍為[0,+∞)。第二步的映射y→RSL則將定義域[0,+∞)映射為值域[0,1],采用如下所示的指數函數模型可以實現:

選用自然駕駛數據中相應LEI值對應的統計百分位數來作為最終的RSL值。在實際應用中,基于大量的自然駕駛軌跡數據,計算得到RSL的大量統計數據,每隔10百分位記錄10~90百分位對應的LEI值,將不同的百分位作為最終映射得到的RSL值。根據式(29)計算出對應的y值,如表2所示,然后根據y與LEImax的對應數據,采用數值擬合的方式得到映射關系。

表2 不同百分位數對應的映射值
現舉例具體說明兩個指標的量化過程。假設鄰后車CRT與主車CM在整個換道過程中的SDI曲線變化以及LEI計算結果如圖9所示。可以計算得出,對于該換道軌跡,風險暴露時長為ΔT1+ΔT2,風險暴露水平REL為(ΔT1+ΔT2)/(T3-T0),最大損失能量指數為LEI(Ta),風險嚴重程度RSL為N(LEI(Ta))。

圖9 某次換道過程CRT與CM的SDI與LEI計算結果
2.3 系統性換道風險分析
REL和RSL量化了整個換道時域內主車與某一旁車發生碰撞的可能性和嚴重程度,為衡量主車與所有旁車的系統性換道風險,采用故障樹分析法FTA[19]對換道進行系統性風險分析。
FTA被廣泛用于分析由人為錯誤和多種推理因素引起的復雜事件,近年來也廣泛應用于交通沖突分析領域[16]。FTA的主要目標是識別整個系統的故障與系統各組成部分的故障之間的關系,并圖形化地顯示關聯事件鏈。它是識別導致失敗的貢獻者的有用工具,每個事件的失敗概率可被模型合并來評估一個給定的整個系統的功能。
將車輛換道定義為一個可進行碰撞風險分析的系統。事件失效定義為主車CM與周圍旁車發生碰撞,記為φ(i)。風險暴露水平REL和風險嚴重程度RSL定義為兩個失效因素。失效事件的發生由這兩個因素綜合體現,只有這兩個因素均達到較高水平時,事件失效風險才達到較高的水平,采用“與”運算來表示這種關系,計算公式為

式中i=1,2,3,4分別表示主車CM與前車CFO、后車CRO、鄰前車CFT、鄰后車CRT的失效事件。
系統的故障ψ定義為主車CM沒能成功換道。而主車CM只要與任何旁車發生失效事件,整個系統就發生了故障,此時的系統故障風險應該達到較高水平。因此,各個失效事件之間應該以“或”運算來得到最終的系統故障風險,計算公式為

完整的故障樹推理過程如圖10所示。

圖10 換道系統故障樹推理過程
3 量化方法應用試驗
為驗證所提出的量化方法的有效性,從自然駕駛數據集中提取換道軌跡樣本,以不同類型、不同位置的換道軌跡客觀風險特征作為量化指標的評判標準,使用綜合量化方法進行風險值量化試驗分析。
3.1 自然駕駛數據來源
考慮到國內尚未有成熟的自然駕駛軌跡數據集,采用德國高速公路的大型自然車輛軌跡數據集——HighD數據集[20]作為驗證數據集。德國的交通規范與中國類似,遵循左超車原則[21],因而道路交通環境與國內有一定相似性,目前國內已有相關研究采用該數據集進行自動駕駛規劃決策的算法研究,并在我國實際道路場景中進行了驗證[22-23]。該數據集從德國高速公路的無人機錄像中提取車輛的后處理軌跡,包括來自6個地點的11.5 h測量值和110 000車輛,所測量的車輛總行駛里程為45 000 km,其記錄場景如圖11所示。HighD數據集包含超過11 000個車道變化,數據集的原始數據的質量較高,使用了多個后處理步驟消除了所有記錄錯誤,并平滑了提取的軌跡,因此無須對軌跡做進一步后處理。
圖11 HighD數據記錄場景
數據集所使用的全局坐標系與視頻的圖像坐標系相對應,原點位于左上角,如圖12所示。坐標系的橫軸是x軸,指向車輛行駛方向,向右為正方向;縱軸是y軸,向下為正方向。另外,所有的尺寸都由像素單位轉換成了SI單位。車道從上往下由1開始編號,第一條車道線以上、最后一條車道線以下和中間隔離帶的非行駛區域也都給予編號。除非另有說明,所有的記錄數據都使用全局坐標系。

圖12 HighD數據坐標定義
數據集包括從60個錄像中提取的數據。其中,01-03、15-24號錄像記錄的路段為雙向四車道;04-14、25-57號錄像記錄的路段為雙向六車道;58-60號錄像記錄的路段為雙向六車道,且在最上方記錄了入口匝道的情況。
每個錄像數據文件包括4個csv文件。描述位置的csv文件主要包含視頻幀率、記錄位置、限速情況、記錄日期、持續時間、不同類型車輛數量(轎車或載貨車)和車道位置等信息。統計車輛情況的csv文件按車輛編號記錄了每一輛車的外形尺寸、起始與結束的幀號、類別、行駛方向、換道次數和軌跡全程的最大最小速度等統計信息。車輛軌跡的csv文件是數據集的核心數據,按車輛編號和幀號的先后順序記錄每一輛車的運動信息和周圍車輛的信息。
3.2 風險量化數據的獲取
3.2.1 換道場景數據提取
首先將換道車輛(主車)的軌跡與車道線的相交點定義為軌跡跨道點;然后從該點沿軌道向后退方向遍歷,當連續3個采樣點的車輛航向角θ小于閾值θth=0.02 rad時,則將第1個航向角小于閾值的采樣點作為換道起點[24]。至于跨道階段終點,按前面的劃分,從軌跡跨道點,沿軌跡向前進方向遍歷,當把車輛中心在地面的投影點與車道線的y向距離等于L和W分別為車輛的長度和寬度)時的采樣點,即為跨道階段的終點,也即回正階段的起點。最后,從該點繼續沿軌跡向前進方向遍歷,當連續3個采樣點的車輛航向角θ小于閾值θth=0.02 rad時,則將第1個航向角小于閾值的采樣點作為回正階段的終點,也即整個換道過程的終點。在整個換道過程,提取主車相應時間幀內的所有軌跡信息,可得到一條完整的換道軌跡。對于記錄時間幀內找不到4個分割點的軌跡,均視為不完整軌跡,將其刪除。對所有錄像的軌跡數據進行提取,得到完整換道軌跡7 047條,其中,向左換道軌跡3 627條,向右換道軌跡3 420條,平均幀數為120.02幀,記錄幀率均為25 Hz,平均換道時間為4.80 s。
在提取到主車的換道軌跡后,還須提取相應時間的旁車軌跡,來構成完整的5車換道場景。換道過程中,由于主車自身的運動或其他車道車輛的跨車道運動,主車與旁車所記錄的位置關系可能有所變化。在場景提取過程中,統一把主車在軌跡跨道點的前一幀(車道編號仍為原始車道)的前后車編號和目標車道的前后車編號作為整個換道過程相應位置的旁車編號。若不存在相應的旁車編號,則用空缺記號標記,表示主車換道過程中,不存在該位置的旁車。根據旁車編號,提取換道時間幀內相應旁車的軌跡信息,和主車軌跡一起,構成了一條完整場景信息。
3.2.2 未知信息的處理
損失能量指數的計算須使用車輛的質量信息,HighD數據集原始數據并未提供。為此,根據車輛的尺寸信息來近似估算車輛的質量信息。數據集的車輛類型主要包括轎車和載貨車兩種。查閱德國本土近年的汽車銷量情況[25],選擇銷量領先的一款大眾高爾夫轎車與一款奔馳重型載貨車,獲得其具體的車輛參數如表3所示。按一般道理,車輛的質量近似與車輛外接長方體的體積成正比,但本文所采用的HighD數據集是使用無人機從空中俯瞰拍攝提取的車輛數據,只有車輛的俯視圖,無法得到車輛高度的信息,只能權且用質量面積比來代替,實為雙重近似,存在一定的誤差。根據車輛參數,計算質量與占地面積的比值,稱為質量尺寸比。用兩款車的質量尺寸比分別近似等同于數據集中拍攝車輛的質量尺寸比,則可通過數據集中的車輛尺寸近似計算車輛質量。

表3 車輛參數
3.3 應用試驗與結果分析
3.3.1RSL歸一化函數擬合
計算所有完整換道軌跡相應的換道場景中,主車與所有旁車的最大LEI值,統計其中非0值的分布情況如圖13所示。可以看到,最大LEI值分布較為集中,主要在20以下的區間內,且頻數隨量化值的增大逐步降低,符合自然駕駛軌跡的低風險特性。從統計結果中記錄10~90百分位對應的最大LEI值,如表4所示。
圖13 HighD數據集換道軌跡LEImax統計分布圖

表4 HighD數據集不同百分位的映射對應結果
以y為縱坐標,LEImax為橫坐標畫出y=f(LEImax)函數的擬合樣本點,并對函數進行擬合,擬合結果(R2=0.9996)如圖14所示。擬合曲線模型為
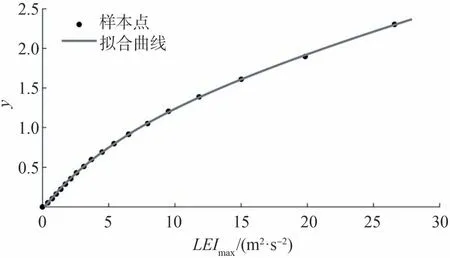
圖14 樣本點與曲線擬合效果

其中各參數的擬合結果為p1=43.73,p2=2098,p3=-309.3,q1=1018,q2=9960。
聯立式(29)和式(32),風險嚴重程度最終的歸一化函數形式為
歸一化后,HighD數據集RSL的量化值分布如圖15所示。可以看到,采用所擬合的歸一化模型后,RSL的量化值較為平均地分布在0-1的各個區間內,有利于智能車輛安全換道決策過程對不同換道軌跡的風險對比分析。

圖15 HighD數據集換道軌跡RSL量化結果分布情況
3.3.2 不同類型軌跡的風險量化與結果分析
為對比不同類型的換道軌跡的風險量化情況,將7 047條換道軌跡分為自由換道和強制換道兩類。自由換道是指駕駛員為追求更佳的駕駛條件而發生的換道行為,強制換道則是指車輛受前方車輛或道路的阻礙而必須執行的換道行為。統計軌跡跨道點之前,主車與前車的碰撞時間和車頭時距,來區分換道軌跡的這兩種類型[26]。強制換道的判定標準為:換道前最小碰撞時間在0~10 s的范圍內,且最小車頭時距小于3 s。不滿足該標準的換道均視為自由換道。最終將7 047條分為自由換道4 442組,強制換道2 605組。
采用換道軌跡風險綜合量化方法分別對自由換道和強制換道的軌跡進行風險量化,分別統計兩種類型軌跡的量化結果在不同區間的分布情況,如圖16所示。可以看到,自由換道的軌跡量化風險值集中于低風險區域,尤其是0~0.05的區間內,占樣本總體的63.77%;其它區間的樣本分布較少,且隨著風險值的增大,分布數量也呈下降趨勢。而強制換道的量化風險值的分布則較為均勻,且高風險值(>0.5)的樣本數較多,分布頻率以0.7-0.8區間為峰值向兩側遞減,最大分布頻率僅占所有樣本的9.52%。

圖16 兩種換道類型風險量化結果
進一步統計自由換道和強制換道的所有樣本的換道時長和沖突風險指標的相關統計值,結果如
表5所示。可以看到,強制換道軌跡的換道總時長均值略大于自由換道軌跡,而風險暴露時長均值則是自由換道軌跡的3.15倍,這說明強制換道過程中,車輛在更多的時刻處于風險狀態,與周圍車輛發生碰撞的可能性更高。且強制換道軌跡的最大損失能量指數均值是自由換道的4.58倍,說明強制換道過程車輛與其他潛在車輛碰撞的嚴重程度也更高。自然駕駛時,車輛在執行強制換道過程中,往往并不具備理想的換道條件,主車與旁車不一定能保持足夠的安全距離,這些因素決定了強制換道客觀存在著比自由換道更高的換道風險。由此可見,所提出的換道軌跡風險綜合量化方法可較好地反映不同類型的自然駕駛換道過程的風險值。

表5 兩種換道類型量化結果統計
3.3.3 不同位置車道的風險量化與結果分析
選擇04-14、25-57號共44個雙向六車道路段錄像數據的換道軌跡。根據主車在換道過程中處于道路的外側車道(靠近應急車道)、中間車道還是內側車道,將所有換道樣本數據分為內側換道和外側換道。內側換道是內側車道與中間車道之間的車輛換道動作,外側換道是指外側車道與中間車道之間的車輛換道動作。按每一個錄像的所有內側換道與外側換道數據計算平均量化風險值,得到結果如圖17所示。可以看出,對于每一個錄像數據,內側換道的風險均值均高于外側換道,平均風險差值為0.04。存在這一差距是因為德國的行車規范與我國類似[21],即遵循從左超車原則,規范行車速度內側車道高于中間車道,中間車道高于外側車道。這可以通過HighD數據集得到驗證:統計44個錄像數據中3個位置車道的車輛平均速度結果如圖18所示。可以看出,44個錄像數據平均車速均遵循從外側車道到內側車道依次上升。進一步計算外側換道和內側換道的平均換道時長,結果如圖19所示。可以發現,內側換道的平均換道時長普遍比外側換道短,這表明:由于行駛速度更高,內側換道行為更加急促,駕駛員需要在更短的時間內完成換道動作,車輛與旁車的碰撞風險增加,最終表現為量化風險值的提高。由此可見,所提出的換道軌跡風險綜合量化方法能反映不同位置車道的自然駕駛換道過程風險的高低。

圖17 不同位置換道平均量化風險值

圖18 不同車道車輛平均車速

圖19 不同位置換道平均換道時長
綜合對不同類型的換道軌跡風險量化和位于不同位置車道的換道軌跡風險量化的分析結果可知,所提出的換道軌跡風險綜合量化方法能合理地對換道風險進行量化。對于自由換道軌跡,量化結果符合其相對集中的低風險特性;對于強制換道軌跡,量化結果符合其高風險特性,且量化結果較為分散,能有效對比區分不同軌跡的換道風險。對于不同位置的換道,量化結果符合內外車道的不同行駛速度帶來的客觀風險特性。
4 結論
(1)基于交通沖突理論,針對完整的車輛換道過程,分析得出車輛在不同階段與周圍車輛的潛在沖突形式。
(2)通過微觀沖突風險指標推導、宏觀換道風險特征提取和系統性換道風險分析,建立了同時考慮潛在碰撞的可能性與嚴重程度的換道軌跡風險綜合量化方法。
(3)利用自然駕駛數據,對綜合軌跡風險量化方法進行應用試驗,驗證了該方法的合理性與客觀性。在缺乏有效事故數據的情況下,實現了對換道軌跡風險的科學量化。
(4)所構建的綜合軌跡風險量化方法,可與軌跡預測技術相結合,基于對換道過程的旁車行駛軌跡的預測結果,量化車輛尚未執行的換道軌跡的碰撞風險,提供先驗的換道安全性信息,為結構化道路中的智能車輛安全換道的規劃與決策提供有價值的參考依據。
