基于改進型ELM的熟練駕駛員行車軌跡擬合方法研究
2021-12-11 13:23:28江昕煒華一丁
汽車工程 2021年11期
江昕煒,陳 龍,華一丁,徐 興
(1.江蘇大學汽車工程研究院,鎮江212013;2.江蘇大學汽車與交通工程學院,鎮江212013)
前言
隨著汽車電動化、智能化技術的快速發展及與感知、機器視覺等高新技術快速融合,智能汽車(或無人駕駛汽車、自動駕駛汽車)已經成為世界汽車工程領域的研究熱點和汽車產業增長的新動力[1-2]。智能汽車在轉向操控品質方面盡量接近人類駕駛員的轉向操控水平,也稱“仿人轉向控制”,是智能汽車轉向控制系統的研究熱點。Kondo等[3]于1953年首先提出相關駕駛員的概念,建立了基于單點預瞄的駕駛員模型,其本質是基于控制理論原理將車輛軌跡橫向偏差逐漸減小到零,從而實現轉向操作。基于“預瞄-跟隨”理論的駕駛員模型是由郭孔輝院士及其團隊率先在國內提出并應用的,將駕駛員模型分為補償跟蹤型和預瞄跟蹤型兩類[4]。這兩類模型中駕駛員的行為特征依靠的是傳遞函數的反饋環節進行近似模擬,其理論并沒有考慮真實駕駛員的轉向習慣和轉向特征。
隨著智能控制方法不斷涌現,出現了結合智能控制的新型駕駛員模型。其中,具有代表性的方法是使用非線性理論無限逼近真實駕駛員,將神經網絡和模糊規則算法應用到類似駕駛員模型的構建過程中。Rix等[5]根據汽車轉向道路實車試驗,利用模糊數學理論模擬駕駛員轉向行為并建立相應模型,該模型綜合考慮了預瞄環節和補償環節兩個方面的控制問題。Cao等[6]基于預瞄最優理論結合簡單人工神經網絡(POSANN)構建駕駛員模型,在考慮攝動動力學和跟蹤誤差情況下建立了新的駕駛員-車輛系統模型,新模型可以提高實時路徑跟蹤性能。張文明等[7]建立基于最優預瞄控制的人工神經網絡駕駛員模型,在直線和曲線路徑跟蹤試驗中體現良好的無人駕駛能力。
傳統駕駛員模型的研究往往只適用于某些典型工況,因此,前期相關研究局限性較為明顯。以適應多樣性復雜環境、提升在線學習能力和實時調整能力為目標的高智能化成為當前自主駕駛研究熱點。MacAdam[8]首次提出基于預測控制的駕駛員模型的概念。之后,Cole等[9]提出基于非合作納什均衡模型預測控制的駕駛員模型,在保證跟蹤精度的前提下有效降低控制器CPU的計算時間。Ungoren等[10]提出一種基于自適應預測控制框架下的側向預瞄駕駛員模型。Prokop[11]提出基于模型預測在線優化的駕駛員模型。
由于以傳統BP神經網絡為代表的非線性擬合算法存在一些缺陷(如訓練參數需人為設定,且易陷入局部最優),本文中針對類似傳統BP神經網絡等非線性算法在擬合駕駛員行車軌跡方面的不足,在傳統極限學習機的基礎上研究提出一種改進的方法,對熟練駕駛員的行車軌跡進行非線性擬合,在普通左/右轉、掉頭、車道保持和換道4種典型轉向工況下進行了分段多項式表達的求解,基于極限學習機的非線性擬合算法,提出了一種卡爾曼濾波優化的策略,對已有極限學習機進行優化,在快速學習的基礎之上,進一步提高學習的準確性。
1 車輛行駛軌跡的多項式擬合
1.1 駕駛員與試驗車輛的選擇
由于駕駛培訓學校的教練長期從事駕駛教學和駕駛實踐工作,因此其駕駛水平是相對較好的,可以近似認為是熟練駕駛員。本文中選擇5名不同駕齡、不同性別的駕駛學校教練作為駕駛員,如表1所示。在實際車輛試驗中,設計了普通向左/右轉向、掉頭轉向、車道保持、換道等4種典型的轉向工況,試驗過程中車輛的速度是確定的,即由熟練駕駛員保持住某一穩定的車速下進行轉向試驗。試驗選用上海通用GL8、斯柯達Octavia、本田雅閣和上汽MG 4款乘用車作為試驗車輛,如圖1所示。

圖1 試驗車輛

表1 駕駛員相關信息
為準確描述熟練駕駛員在典型轉向工況下的轉向操作特征,選擇兩方面的特征參數:駕駛員轉向特征參數和車輛動力學參數。駕駛員轉向特征參數包括:轉角信號、轉矩信號和轉角速度信號。車輛動力學參數包括:橫擺角速度信號、側傾角信號和側向加速度信號。各典型轉向工況的試驗組數和試驗車速如表2所示。

表2 試驗組數與試驗車速
1.2 普通右轉/左轉工況軌跡擬合
熟練駕駛員在駕駛車輛時,會根據車輛和環境信息規劃出一條最優的行車路徑,然后操作轉向盤、加速踏板或制動踏板,使車輛沿著規劃好的路徑平穩行駛。雖然自動駕駛車輛可以根據相關信息使用一些先進算法(如貝塞爾曲線、樣條曲線等)進行路徑規劃,但所生成的路徑與實際駕駛員行駛的路徑有很大差別,這就有可能使自動駕駛車輛的舒適性變差。通過學習熟練駕駛員在不同工況下的行車路徑,使無人駕駛車輛可以像熟練駕駛員一樣操控車輛平穩地行駛。
在普通右轉/左轉工況下影響駕駛員行車軌跡的主要因素為:車速、駕駛風格、道路曲率和預瞄距離。普通右轉/左轉工況下的車輛行駛軌跡如圖2(a)所示,為了準確表示熟練駕駛員的轉向特性,采用分段多項式對普通右轉/左轉工況下的車輛行駛軌跡進行擬合,第1段和第2段擬合曲線如圖2(b)和圖2(c)所示,R2分別為0.994 2和0.993,接近1,說明擬合精確度很好。
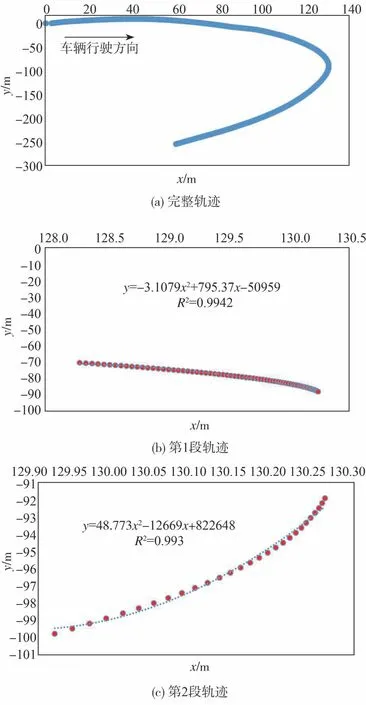
圖2 普通右轉工況下軌跡擬合
1.3 掉頭工況軌跡擬合
在掉頭工況下影響駕駛員的行車軌跡的主要因素為:車速、駕駛風格、道路曲率和預瞄距離。掉頭工況下的車輛行駛軌跡如圖3(a)所示,為了準確表示熟練駕駛員的轉向特性,采用分段多項式對掉頭工況下的車輛行駛軌跡進行擬合,第1段和第2段擬合曲線如圖3(b)和圖3(c)所示。R2分別為0.984 4和0.992 7,接近1,說明擬合精確度很好。

圖3 掉頭工況下軌跡擬合
1.4 車道保持工況軌跡擬合
在車道保持工況下影響駕駛員的行車軌跡的主要因素為:車速、駕駛風格和預瞄距離。車道保持工況下的車輛行駛軌跡如圖4所示,由于車道保持工況的車輛行駛軌跡較簡單,采用一次多項式就可以進行很好擬合,R2為0.992 1,非常接近1。

圖4 車道保持工況下軌跡擬合
1.5 換道工況軌跡擬合
在換道工況下影響駕駛員行車軌跡的主要因素為:車速、駕駛風格、側向距離和預瞄距離。
換道工況下的車輛行駛軌跡如圖5(a)所示,為了準確表示熟練駕駛員的轉向特性,采用分段多項式對換道工況下的車輛行駛軌跡進行擬合,第1段和第2段擬合曲線如圖5(b)和圖5(c)所示。R2分別為0.993 1和0.981 7,接近1,說明擬合精確度很好。

圖5 換道工況下軌跡擬合
1.6 分段函數銜接點處理
普通右轉/左轉工況、掉頭工況以及換道工況都可以采用分段函數進行擬合,其路徑函數表達式依次表示為

車道保持工況的路徑函數表達式為

分段軌跡的銜接問題直接影響著車輛行駛軌跡擬合的準確性,偽譜法[12]的優點在于采用全局正交多項式逼近銜接處的狀態量和控制量,只需引入切換點處的相應約束條件即可處理分段軌跡的銜接問題。假設一條由兩段路徑組合而成的軌跡,在銜接點處的狀態量和控制量的表達形式為
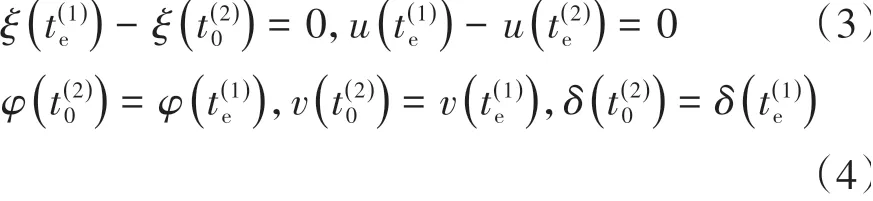
式中:ζ為狀態量;u為控制量;φ為車輛航向角;v為車輛速度;δ為轉向盤轉角;t0(1)為第1階段路徑開始時刻;te(1)為第1階段路徑終止時刻;t0(2)為第2階段路徑開始時刻;te(2)為第2階段路徑終止時刻。
由于偽譜法需要將時間區域轉換到[-1,1]上,因此需要對車輛行駛軌跡階段時間區域進行變換,將時間區域分成多個子區間,再將每個子區間分別轉換為非線性規劃問題(NLP)求解。因此,選取K-1個節點,將最優控制問題在t∈[t0(2),te(2)]上分成K個子區間,即t0(2)<t1<…<tk=te(2),由于連接點位置的選擇是一個迭代的過程,因此t0(2)值的選取也是一個迭代過程。

式中γ為給定的時間頻率。
對于任意子區間k,通過式(6)將時間區域由t∈[tk-1,tk]轉換到τ∈[-1,1]。

hp自適應偽譜法在每次完成優化計算后都會檢查離散點的數目與分布情況,當某一離散區間的計算精度不滿足要求時,由hp自適應方法對該區間內的配點數h和全局插值多項式的維數p進行自適應調整。然后進行下一次的優化計算,直至殘差滿足要求為止。其算法流程如圖6所示。

圖6 自適應偽譜法計算流程
2 權重實時更新的極限學習機
2.1 極限學習機原理
為解決傳統神經網絡算法(如BP神經網絡)學習量大、訓練參數需人為設定、容易陷入局部最優等弊端,新加坡南洋理工大學黃廣斌教授率先提出極限學習機算法[13],在設計相應算法時,只需對隱含層節點數進行改變,無須對網絡輸入權值和偏置進行調整,就會得到最優解,圖7給出了極限學習機的結構組成,極限學習機算法的學習速度較快且泛化能力較強[14]。

圖7 極限學習機原理結構圖
若數據從輸入端輸入x,則L個隱結點的輸出函數可以表示為

式中:βi為連接第i個隱結點的輸出權;gi(x)為第i個隱結點的輸出函數。隱結點有不同的類型,常用的主要有以下5種:
(1)附加隱結點函數gi(x)=G(ai?x+bi)
(2)RBF隱結點函數gi(x)=G|(bi?x-ai)|
(3)S型隱結點函數

(4)Hardlimit型隱結點函數

(5)多元二次隱結點函數

式中g為激勵函數,表示向量內積。作為單隱層前饋神經網絡,其顯著結果個數與激勵函數的結點個數有關,若任意非線性激勵函數的結點數為N,則單隱層前饋神經網絡能夠依概率產生N個顯著結果[15]。單隱層前饋網絡可以隨機地生成隱結點,在本質上與統一的學習機相同,任意有界分段函數可以作為附加結點的激勵函數,而RBF的激勵函數則可以是任意可積的分段連續函數[14]。由Bartlett[16]理論可知,極限學習機輸出權的獲取可以根據最小權的方法,且采用最小范數進行最小誤差解的計算,從而有效提高了其通用性能。當顯著訓練樣本(xi,yi)個數為N時,隱結點個數為L的極限學習機的輸出為

式中:h(x)為隱層的輸出向量,隱層的結點參數(ai,bi)(i=1,…,L)是隨機分配的,連接第i個隱結點到輸出結點的輸出權重βi。
通過分析,這個線性系統的矩陣表達式為

則有

根據輸入xi,有隱層輸出網絡矩陣H,而第i行代表隱層的輸出向量。根據所有的輸入(x1,…,xN),第i列代表第i個隱結點的輸出。通過求解以下方程組的最小二乘解獲得

β?:式中H?為H廣義偽逆雅可比矩陣,而最小范數β的最小平方解具有唯一性,使其訓練誤差達到最小。假定隱結點數L和訓練樣本數N,若存在L=N,則矩陣H是方陣且可逆。一般情況L<N,因此釆用廣義逆矩陣求解。
2.2 基于卡爾曼濾波優化的極限學習機
ELM的輸出權重估計問題一般是利用普通的最小二乘法(least squares,LS)進行解決。但是,LS估計器會在有多重共線性的情況下產生不良預測,導致較大方差,降低模型的穩定性,從而使學習的準確度降低[17],僅僅通過增加附加參數來優化輸出權重,并沒有從根本上解決問題。為解決傳統ELM多重共線性的問題,提出利用卡爾曼濾波(Kalman filter,KF)算法對ELM的輸出權重進行實時更新,并通過調整其方差來實現,即基于卡爾曼濾波優化的極限學習機(Kalman filter extreme learning machine,KFELM),該算法是基于卡爾曼濾波器的工作原理來處理多重共線性問題且實時調整估計狀態方程的方差。
針對輸出權重矩陣設計了濾波環節,此過程在權重更新階段循環計算,隨后,估計值通過濾波環節回歸系數進行調整。
卡爾曼濾波算法可以簡單概括如下。
其中預測階段包括:

更新階段包括:

式中:vt為t時刻下測量殘差;St為t時刻的測量預測協方差;Kt為卡爾曼增益,它決定在t時刻預測階段需要調整量的大小;Qt和Vt分別為狀態轉移和測量方程在t時刻的協方差。卡爾曼濾波算法的迭代過程如圖8所示。

圖8 卡爾曼濾波迭代流程
這里所提出的KFELM算法的輸出權重更新算法可以概括如下。
步驟1:初始化階段,得出t時刻的初始輸出權重β,利用最大似然估計公式,即

來估計轉移矩陣A和協方差矩陣vε和vω,這些參數是卡爾曼濾波器的重要組成部分,將用于后續步驟中,用來調整增益矩陣。
步驟2:給出t+1時刻的訓練樣本:

然后,利用式(22)計算Ht+1:

接著,利用式(23)計算Tt+1:

步驟3:對于t+1時刻的權重估計值βt+1,利用式(24)進行計算:

用卡爾曼濾波器的遞推方程對αt進行濾除,用式(25)和式(26)狀態方程估計α?t+1|t和R?t+1|t:

步驟4:利用式(27)計算t+1時刻的觀測輸出矩陣

步驟5:計算卡爾曼增益Kt+1,用于計算線性最小誤差方差的估計值:

步驟6:利用式(29)更新αt+1|t+1的狀態值:

步驟7:更新狀態協方差矩陣Rt+1|t+1:

步驟8:根據狀態空間模型的遞歸最小二乘解計算步驟。重復步驟2~步驟7,直到順序訓練數據結束。
步驟9:將α指定為由卡爾曼濾波器完成的回歸結果系數。
步驟10:最后,根據式(31)線性方程得到估計的調整輸出權重矩陣:

3 基于KFELM的車輛行駛軌跡非線性擬合
由于駕駛環境的多樣性和復雜性,同時熟練駕駛員操控車輛進行轉向本身就是一個非常復雜的駕駛過程。建立完善的數學模型去模擬駕駛員的轉向行為是很難實現的。而良好的非線性逼近能力、快速學習及良好的泛化性能正是KFELM算法的優點,因此該算法適用于熟練駕駛員行車軌跡的擬合。通過KFELM算法的大量學習,訓練出較為準確的車輛行駛軌跡。
由于實車試驗的數據量較少,會影響KFELM算法的訓練精度,因此本文中利用UC-win/Road三維交通實時虛擬仿真軟件以及駕駛模擬儀進行大量模擬駕駛仿真試驗,目的是對實車試驗數據量進行補充。駕駛員利用駕駛模擬儀采集行車軌跡數據的過程如圖9所示。

圖9 駕駛模擬儀采集數據平臺
所有的數據學習和測試都是在安裝有MATLAB軟件和具有2.40 GHz,6 GB RAM的計算機上進行的。實車試驗數據與通過駕駛模擬儀采集到的數據相加,總共采集到的試驗數據組數如表3所示,其中訓練、測試數據按5∶1的比例從總數據樣本中隨機選取。其中,普通右轉/左轉工況的輸入為車速、駕駛風格、道路曲率和預瞄距離,輸出為a2、a1、a0;掉頭工況的輸入為車速、駕駛風格、側向距離和預瞄距離,輸出為b2、b1、b0;車道保持工況的輸入為車速、駕駛風格和預瞄距離,輸出為d1、d0;換道工況的輸入為車速、駕駛風格、側向距離和預瞄距離,輸出為c2、c1、c0。在開始訓練之前,所有的輸入數據都需要歸一化到[0,1]的范圍內。訓練過程中,所有的輸出數據都需要標準化處理,使其保證在[-1,1]的范圍內,KFELM算法主要計算隱層輸出矩陣H的廣義偽逆雅可比矩陣H?。

表3 各工況訓練和測試組數
為便于分析KFELM算法在各種工況下的運行結果,分別采用極限學習機(ELM)和傳統的神經網絡算法BPNN對車輛行駛軌跡進行擬合,各種算法的訓練精度、測試精度和學習時間數據對比如圖10~圖13所示。將各種算法的訓練精度、測試精度和學習時間定量地表示出來,如表4所示。
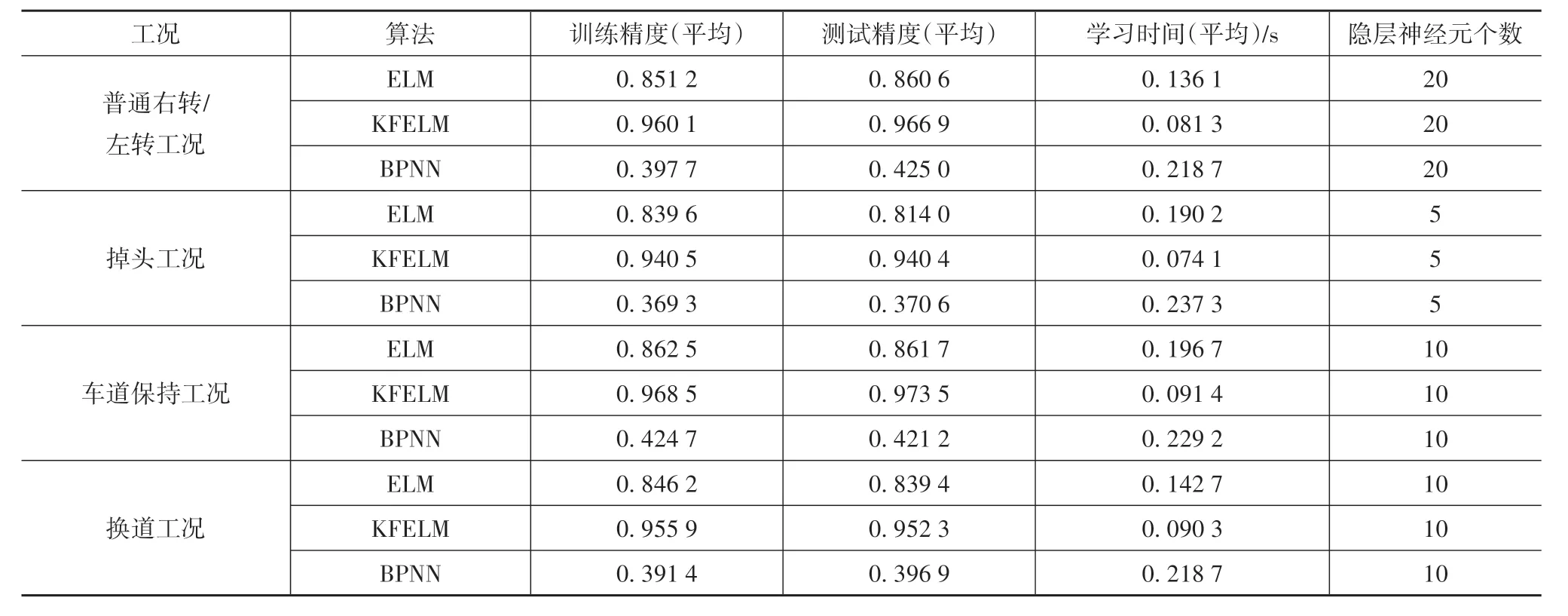
表4 不同算法在各種工況下的性能比較
圖10 為普通右轉工況下不同算法效果比較。在普通右轉/左轉工況下,由于試驗數據組數相比于其他3種工況較多,因此設置隱層神經元個數為20,基于KFELM算法的訓練精度和測試精度分別為96.01%和96.69%,明顯優于基于ELM算法的85.12%和86.06%以及基于BPNN算法的39.77%和42.5%,同時在學習速度方面,基于KFELM算法僅用時0.081 3 s,明顯優于基于ELM算法的0.136 1 s以及基于BPNN算法的0.218 7 s。該KFELM算法學習速度非常快,體現出了ELM算法的特點,同時,在ELM算法的基礎之上進一步提高了算法的訓練精度和測試精度,較好地實現了普通右轉/左轉工況下的車輛行駛軌跡的擬合。

圖10 普通右轉工況下不同算法效果比較
圖11 為掉頭工況下不同算法效果比較。在掉頭工況下,由于試驗數據組數相比于其他3種工況較少,因此設置隱層神經元個數為5,基于KFELM算法的訓練精度和測試精度分別為94.05%和94.04%,同樣優于基于ELM算法的83.96%和81.4%以及基于BPNN算法的36.93%和37.06%,同時在學習速度方面,基于KFELM算法僅用時0.074 1 s,明顯優于基于ELM算法的0.190 2 s以及基于BPNN算法的0.237 3 s。可見,KFELM算法較好地實現了掉頭工況下車輛行駛軌跡的擬合。
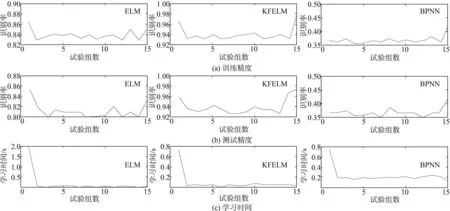
圖11 掉頭工況下不同算法效果比較
圖12 為車道保持工況下不同算法效果比較。在車道保持工況下,由于試驗數據組數相對較少,因此設置隱層神經元個數為10,基于KFELM算法的訓練精度和測試精度分別為96.85%和97.35%,同樣優于基于ELM算法的86.25%和86.17%以及基于BPNN算法的42.47%和42.12%。同時在學習速度方面,基于KFELM算法僅用時0.091 4 s,明顯優于基于ELM算法的0.196 7 s以及基于BPNN算法的0.229 2 s。可見,KFELM算法較好地實現了車道保持工況下車輛行駛軌跡的擬合。

圖12 車道保持工況下不同算法效果比較
圖13 為換道工況下不同算法效果比較。由于車道保持工況的試驗數據組數相對較少,因此設置隱層神經元個數為10,基于KFELM算法的訓練精度和測試精度分別為95.59%和95.23%,同樣優于基于ELM算法的84.62%和83.94%以及基于BPNN算法的39.14%和39.69%,同時在學習速度方面,基于KFELM算法僅用時0.090 3 s,明顯優于基于ELM算法的0.142 7 s以及基于BPNN算法的0.218 7 s。可見KFELM算法較好地實現了換道工況下車輛行駛軌跡的擬合。
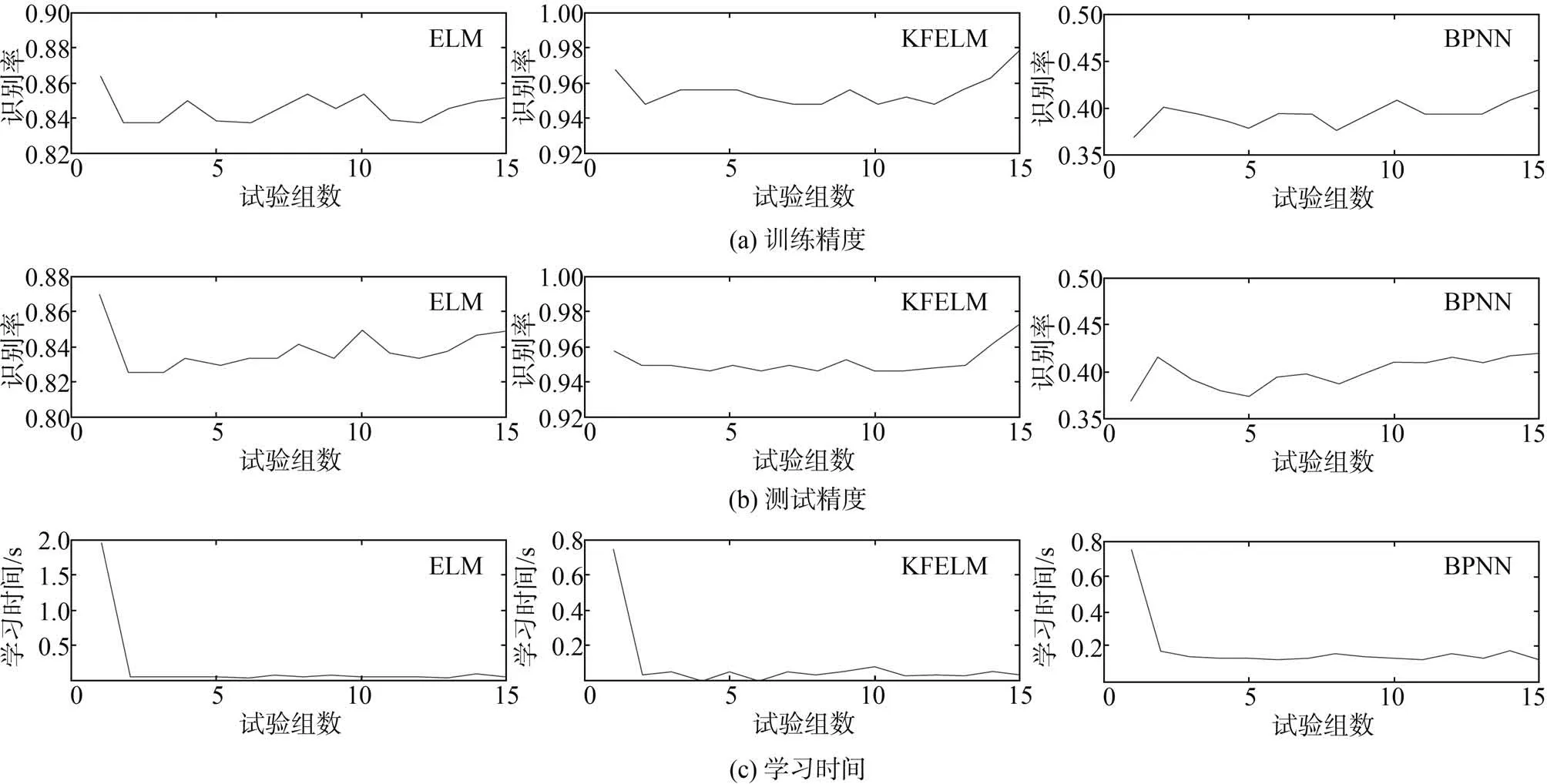
圖13 換道工況下不同算法效果比較
4 結論
(1)用分段多項式表達右轉、掉頭、車道保持和換道等4種典型轉向工況下熟練駕駛員的行車軌跡,采用自適應偽譜法處理分段軌跡的銜接問題,提高車輛行駛軌跡擬合的準確性。
(2)基于極限學習機的非線性擬合算法,提出了一種卡爾曼濾波優化的策略,通過調整方差,對ELM的輸出權重進行實時更新,設計了針對輸出權重矩陣的濾波環節,解決多重共線性問題。
(3)對4種工況進行了擬合試驗。結果表明,該方法對熟練駕駛員的行車軌跡進行非線性擬合,可以保證在快速學習的基礎上,進一步提高學習的準確性,較好地實現了4種典型工況下車輛行駛軌跡的擬合。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
