基于LabVIEW的PCB平面繞組力矩電機狀態監測系統設計
2021-12-11 07:57:54劉榮譽石利霞王勁松屈阿雪
長春理工大學學報(自然科學版) 2021年6期
劉榮譽,石利霞,王勁松,屈阿雪
(長春理工大學 光電工程學院,長春 130022)
PCB平面繞組力矩電機具有體積小、可靠性高、在轉矩很小的情況下依然能保證電機的低速平穩運行的優點,因此在諸如生物測量儀、OCT、太赫茲時域光譜儀等精密時域干涉系統中有著廣泛的應用,其運行狀態對此類儀器干涉信號具有直接影響,因此對其進行狀態監測十分必要[1]。目前電機狀態監測的研究主要集中在異步電動機和大型發電機,對PCB電機狀態監測的研究還很少。2016年王曉晨等人[2]利用有限元分析對PCB電機的溫升進行仿真和實驗;2019年李全峰等人[3]利用振動速度頻譜分析對PCB電機的轉子偏心故障進行故障診斷;2019年Meng-Kun Liu等人[4]基于 Sugeno模糊積分將感應電機的振動和電流信號融合,提高電機診斷的準確性;2019年 Hong-Chan Chang等人[5]開發了包括工作狀態監測(OCM)和故障診斷分析(FDA)的混合方法監測異步電機的狀態,提高電機運行的可靠性。PCB平面繞組力矩電機的平穩性、可靠性主要受電壓、電流和振動的影響,單一的故障診斷方法很難全面地監測PCB平面繞組力矩單機的狀態,因此本系統采用電機電信號分析(ESA)和振動診斷技術融合的手段,從而達到對PCB平面繞組力矩電機運行狀態進行實時監測的目的[6-10]。
1 系統的總體結構
以LabVIEW為基礎設計的PCB平面繞組力矩電機狀態監測系統的總體結構框圖如圖1所示,該監測系統分為硬件系統和軟件系統兩部分。
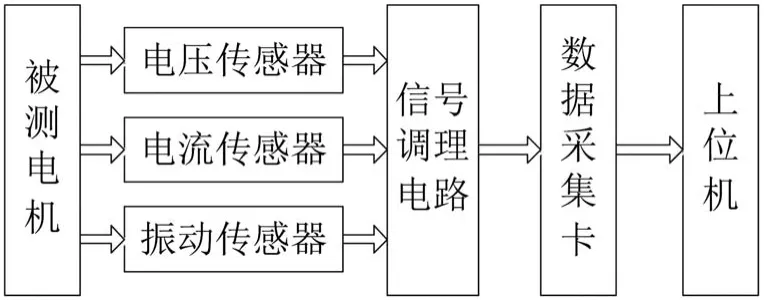
圖1 電機監測系統結構框圖
2 電機監測系統硬件選型
該電機狀態監測系統的硬件系統中分別采用電壓傳感器、電流傳感器和振動傳感器實現對PCB平面繞組力矩電機的電壓、電流和振動運行參數的實時在線獲取,通過信號調理電路的信號變換,轉換成數據采集卡可以采集的信號[11]。
2.1 電機參數采集傳感器選型
傳感器的選型原則是確定傳感器型號的關鍵,通常需要考慮靈敏度、響應特性、線性范圍及精度等原則。
(1)電壓傳感器選擇。根據PCB平面繞組力矩電機的結構特點和工作原理選用CHVS-AS5霍爾閉環式電壓傳感器。該傳感器基于磁平衡原理,具有出色的精度、良好的線性度、抗干擾能力強、低溫漂、響應時間快等優點。其測量范圍為32 mA,線性度≤0.1%FS,響應時間為≤40 μs,電壓失調溫漂≤±1 mV/℃。經過計算,在霍爾電壓傳感器前面串聯一個390 Ω的電阻將電流信號轉化為可供數據采集卡采集的電壓信號。
(2)電流傳感器選擇。根據PCB平面繞組力矩電機的結構特點和工作原理選用SLEME-CSR5霍爾電流傳感器。該傳感器是應用霍爾效應原理開發的小電流高精度測量的傳感器,具有出色的精度、良好的線性度、抗干擾能力強、低溫漂、響應時間快等優點。其測量范圍為2.000 A,線性度≤0.1%FS,響應時間≤1~5 μs,電壓失調溫漂為≤±0.450 mV/℃。
(3)振動傳感器選擇。根據傳感器的選型原則,綜合對比電渦流傳感器、速度傳感器和加速度傳感器的工作原理及特點,最終選擇CT1005L壓電式加速度傳感器,加速度傳感器具有體積小、重量輕且安裝方便等特點,更重要的是它不需要昂貴的電荷放大器,因此更具有經濟性。其電荷靈敏度為49.7 mV/g,頻率范圍為0.5~5 000 Hz,最大量程為100 g,其輸出的被測振動加速度信號經恒流源進行放大濾波處理,恒流源同時為壓電式加速度傳感器供電。
2.2 數據采集卡的選型
根據以上傳感器類型及實際需求,考慮經濟成本后選用阿爾泰公司的USB-3202作為數據采集卡,該采集卡的接線方式為USB的總線方式,單通道采樣率最高可達250 ks/s,分辨率為16位,最大量程為-10~10 V,提供8路單端、4路差分模擬輸入,4路可編程I/O和1個32位計數器等功能。
3 監測系統上位機軟件設計
3.1 上位機軟件結構
PCB平面繞組力矩電機狀態監測系統采用模塊化設計思想,主要包括數據采集模塊、數據處理模塊和歷史數據查詢模塊。監測系統上位機軟件流程如圖2所示[12]。
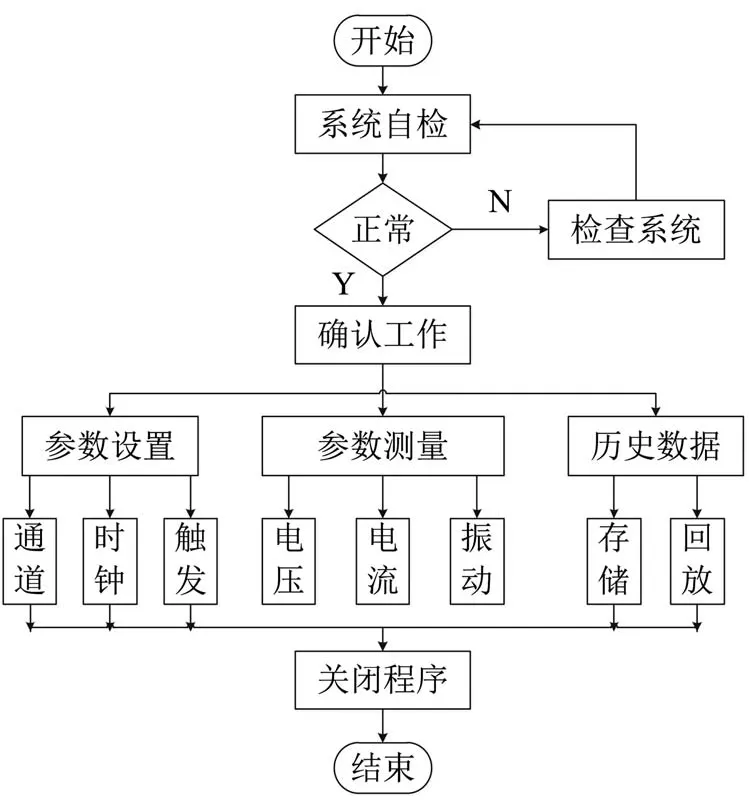
圖2 監測系統上位機軟件流程圖
3.2 數據采集模塊
實現多通道數據采集比較常用的方法包括通過單片機或數據采集卡與LabVIEW相結合,然后通過RS232口傳輸給上位機,但此類方法設計較為復雜,且信號傳輸速度慢,故而本系統選用了USB數據采集卡,數據采集程序如圖3所示。為了方便對信號處理后的波形進行對比,本系統采用三個波形控件分別對電壓、電流和振動波形進行顯示[13]。
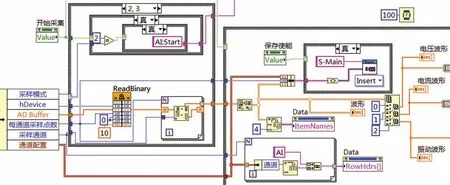
圖3 數據采集模塊程序框圖
3.3 數據處理模塊
由于采集的電機信號中夾雜著大量的噪聲干擾,嚴重影響了對電機狀態的正確判斷,因此加入信號處理程序對采集的信號進行濾波去噪。系統中采用LabVIEW信號處理工具箱中的濾波器、Wavelet Analysis工具對采集的信號進行處理,采用巴特沃斯濾波對電壓、電流信號進行濾波,采用小波變換對振動信號進行去噪。數據處理程序如圖4所示[14-16]。
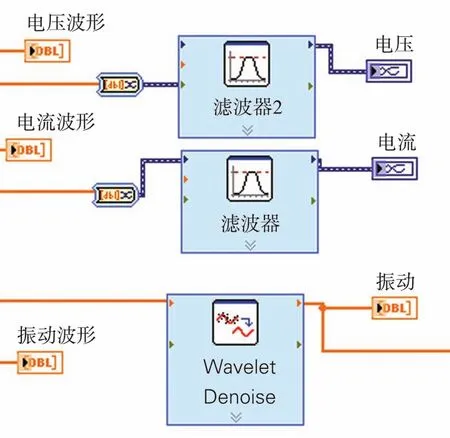
圖4 數據處理程序框圖
比較分析小波去噪硬閾值和軟閾值的特點,選用軟閾值法對振動信號進行去噪,通過采用多種小波基函數進行計算,選取db08小波基函數,分解層數為5,選擇Minimax閾值,采用極大極小準則確定閾值。小波包結構如圖5所示。
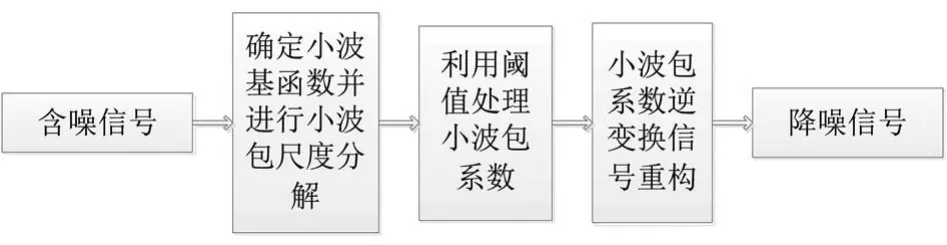
圖5 小波包結構圖
3.4 歷史數據顯示模塊
對歷史數據的存儲和回放在采集系統中必不可少,而且為了便于對電機任何時刻的運行情況進行分析,還需要對歷史數據進行讀取。
歷史數據回放時依然是以波形圖和數組兩種形式顯示,歷史數據保存程序設計如圖6所示。歷史數據回放程序如圖7所示,歷史數據回放界面如圖8所示。
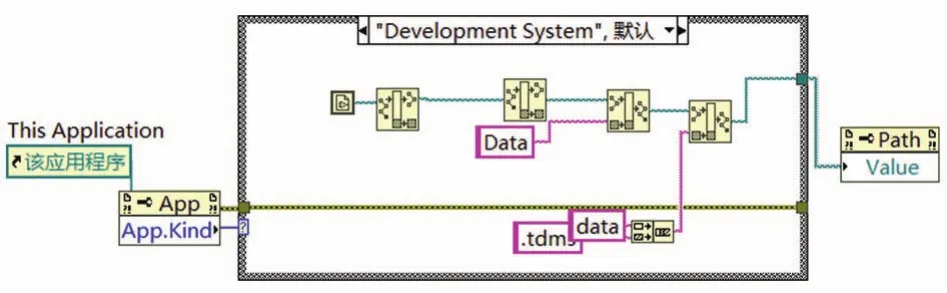
圖6 歷史數據保存程序設計
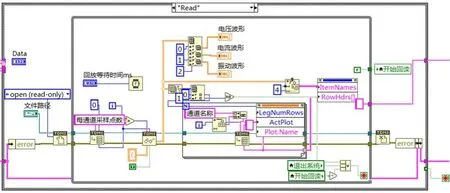
圖7 歷史數據回放程序設計
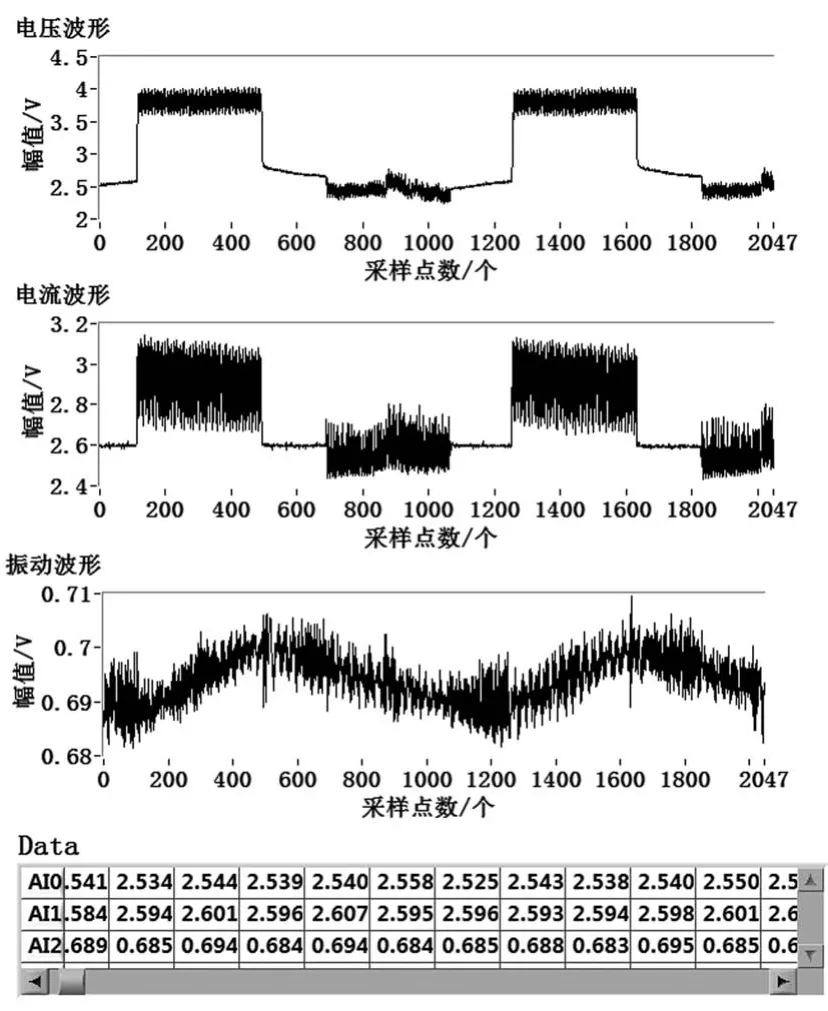
圖8 歷史數據查詢界面圖
4 實驗與分析
實驗中選用存在軸承故障的PCB平面繞組力矩電機作為被監測對象,利用穩壓電源給電機驅動提供18 V的直流電壓,以C相電壓、電流信號為例對PCB平面繞組力矩電機的電壓、電流信號進行監測。利用Arduino板對霍爾電壓、電流傳感器供電,壓電式加速度傳感器放置在電機機座上,適配器為壓電式加速度傳感器提供24 V電壓,數據采集卡將采集到的三路信號傳輸給上位機,PCB平面繞組力矩電機狀態監測實驗系統如圖9所示。
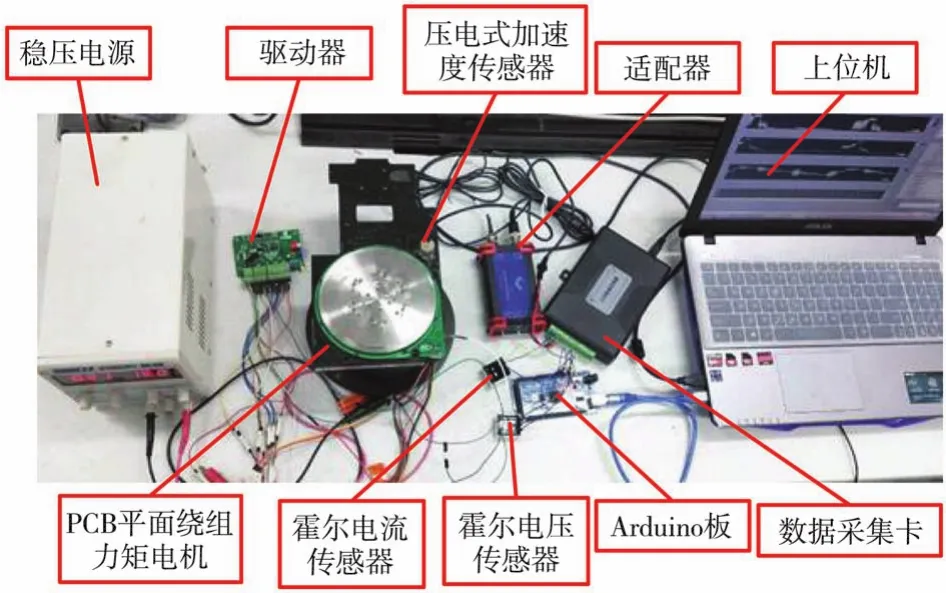
圖9 電機監測系統實驗裝置圖
設計的系統可以實時監測電機的電壓、電流和振動信號,電機監測系統采集到的波形如圖10所示,原始信號中包含大量噪聲,圖11所示為經過信號處理后的波形與示波器的電壓波形,通過對比可以看出本系統保證了信號的不失真采集。
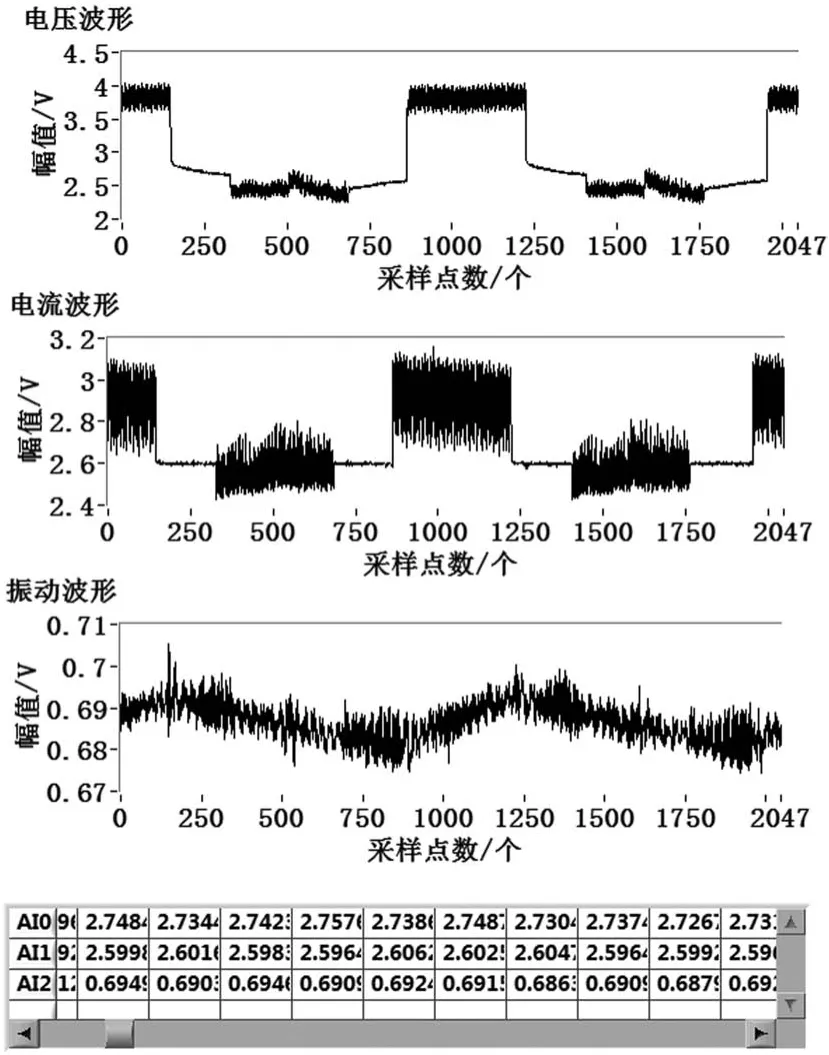
圖10 電機監測系統原始信號波形圖
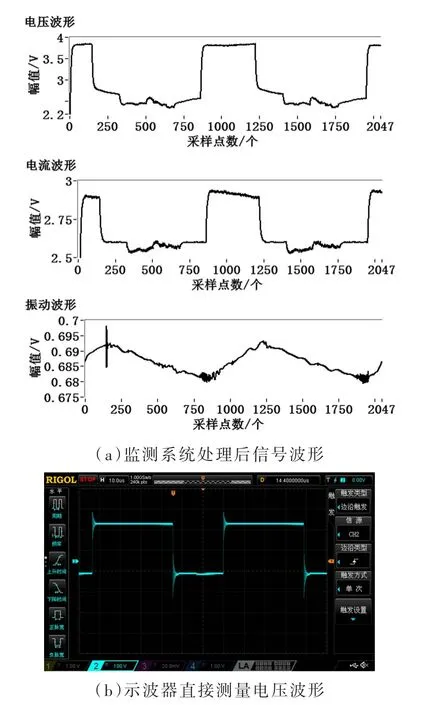
圖11 監測系統與示波器直測波形對比
圖12所示分別是電壓過小和堵轉情況下PCB平面繞組力矩電機各參數的波形圖,從圖中可以看出,當電壓過小時,電機的電壓、電流也隨之降低,振動幅度增大并出現波動,當電機發生堵轉時,電壓、電流恒定,PWM波消失,振動頻率和幅度增大。
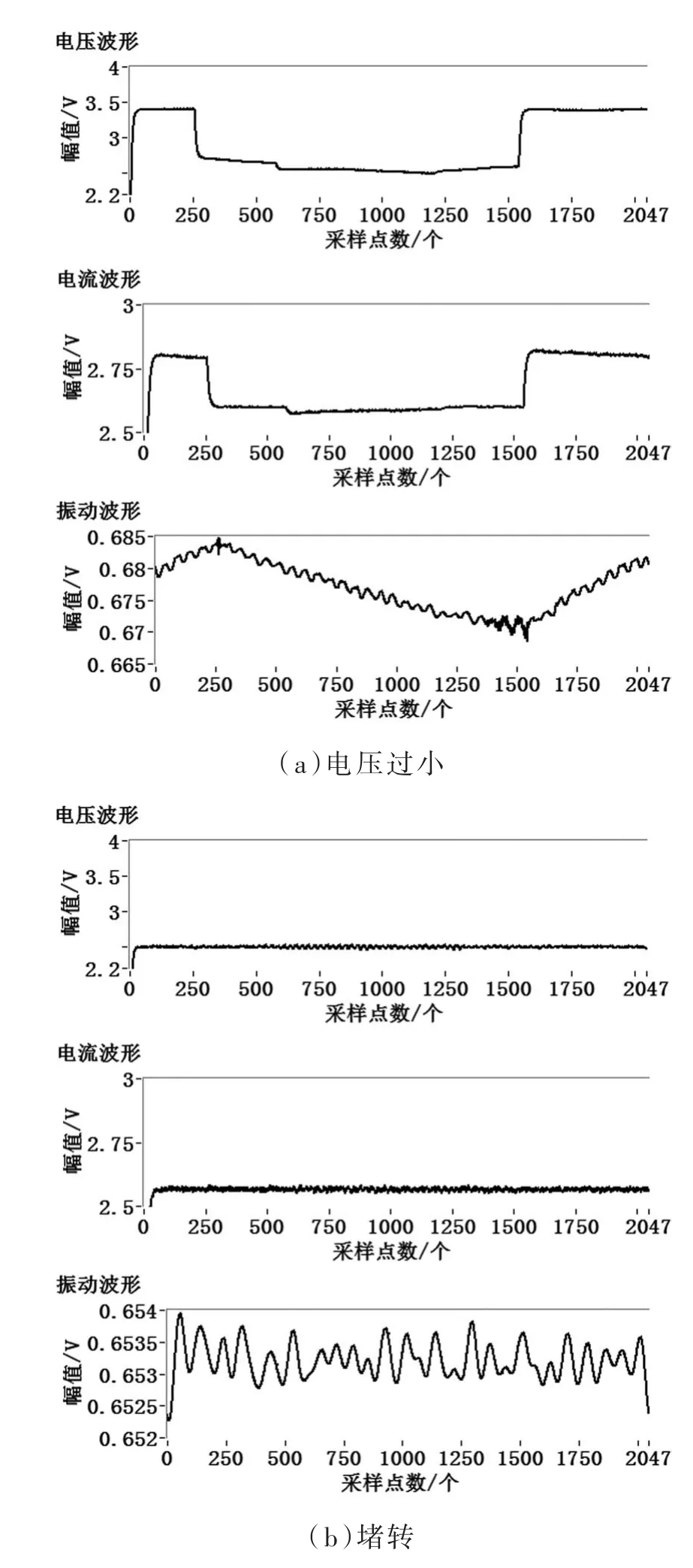
圖12 電機欠壓和堵轉時的監測波形圖
通過上述實驗驗證,該系統能夠實現對PCB平面繞組力矩電機的運行狀態實時在線監測。
5 結論
PCB平面繞組力矩電機狀態監測系統可實現對電機驅動電壓、電流及機構振動的實時在線監測,對電壓、電流的監測分辨率可達到75 μV,振動信號監測分辨率可達到0.15 mV,監測效果良好。由于時間限制,暫未對系統中振動信號檢測標定,以及故障診斷的智能算法沒有進行研究,應在后續工作中加以完善和優化。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45