基于PID控制的同步發(fā)電機勵磁控制優(yōu)化
2021-12-11 06:01:18韓雨晴王致杰
新一代信息技術 2021年20期
韓雨晴,王致杰
(上海電機學院,電氣學院,上海 201306)
0 引言
同步發(fā)電機勵磁控制系統(tǒng)是同步發(fā)電機控制系統(tǒng)的焦點。同步發(fā)電機勵磁控制在改善電力系統(tǒng)的穩(wěn)定性方面具有十分重要的意義,因此同步發(fā)電機勵磁控制始終受到學術界的廣泛關注。通過多年的探索和實踐證明,實現對于同步發(fā)電機勵磁的合理有效控制,是實現整個電力系統(tǒng)的穩(wěn)定和運行所需的最有效方法,因此,我們有必要針對發(fā)電機勵磁控制系統(tǒng)的各種控制方法進行相應的研究。
發(fā)電機勵磁控制系統(tǒng)的控制方法有很多,但實際控制中應用最廣泛的控制方法還是 PID控制,PID控制是發(fā)展最早,迄今為止工程控制中應用最普遍的控制策略之一。自動調節(jié)控制系統(tǒng)如今也覆蓋社會生產生活的方方面面,包括生物、電子、機械或政治經濟領域,是工程控制領域里應用最廣泛的系統(tǒng)之一。逐漸發(fā)展起來的控制理論以及方法很多基于傳統(tǒng)的PID控制,隨著科技的發(fā)展,實際控制過程中有大多數仍然采用 PID結構,并且許多最新出來的控制方式都是基于PID控制。
在許多控制方法中,簡單的操作原理反而擁有更高的控制效果,并且易于實現。PID控制的適應性很強。對于非線性和時變系統(tǒng)來說,也可以對其實行一定的簡化操作,轉變成線性和非時變的一個系統(tǒng)。
因此本文對PID勵磁控制系統(tǒng)進行了設計分析,運用PID參數整定原則選取到合適的PID控制參數,在 simulink 環(huán)境下創(chuàng)建了帶 PID 控制和不帶 PID 控制的勵磁控制系統(tǒng)仿真模型,在相同的階躍信號輸入下對仿真結果進行對比,為使用PID控制提供了數據支撐。
1 同步發(fā)電機勵磁控制系統(tǒng)建模
1.1 同步發(fā)電機勵磁控制系統(tǒng)組成
同步發(fā)電機的勵磁控制系統(tǒng)可以由下圖 1來表示。
從圖 1中可以看出初始是由發(fā)電機發(fā)出電壓,電壓的大小用Ug來表示,發(fā)出的電壓經過電壓互感器,用來測量Ug的大小,測量出來的大小與給定的電壓Uref進行比較,得到偏差電壓Uerr,其 Uerr偏差電壓還需要通過電壓調節(jié)器(AVR)對電壓進行調節(jié)。由于發(fā)電機對設備或者蓄電池供電時,都會要求其輸出的電壓穩(wěn)定,輸出電壓的穩(wěn)定即通過調節(jié)電壓的環(huán)節(jié)進行電壓的調整[1]。偏差值進入自動電壓調節(jié)器的增益部分進行分析和計算,最后通過勵磁器的功率增益部分調節(jié)發(fā)電機的勵磁電路。
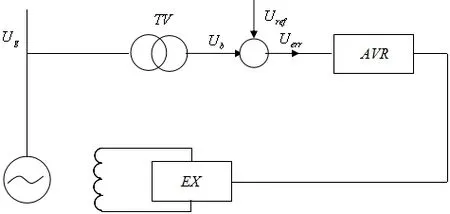
圖1 勵磁自動控制系統(tǒng)組成框圖Fig.1 block diagram of the composition of the excitation automatic control system
1.2 同步發(fā)電機建模
由于同步發(fā)電機結構復雜且包含的變量眾多,現創(chuàng)建分析發(fā)電機勵磁控制系統(tǒng)所用的傳遞函數,故發(fā)電機的傳遞函數可以表示為:

式(1)中,KG為發(fā)電機的放大倍數;TG為時間常數。
1.3 電壓測量比較單元建模
當同步發(fā)電機完成輸出到輸入轉化的過程當中,對于整流濾波可能會有一些延時,此時,它可以用一階慣性環(huán)節(jié)來表示,傳遞函數可以表示為:

式(2)中,KR為電壓傳感器的輸入以及輸出的常數;TR為濾波回路的時間常數。
1.4 綜合放大單元建模
綜合放大單元也可以近似為一階慣性,傳遞函數可以表示為:

式(3)中,KA為移相觸發(fā)及功率放大單元的放大系數;TA為移相觸發(fā)及功率放大單元的時間常數。
1.5 功率放大單元建模
由于晶閘管的運行是間歇性的,有時間滯后。功率放大器單元也可以被認為是一階慣性環(huán)節(jié)。因此傳遞函數可以近似寫成:

式(4)中,KZ為功率放大單元系數;TZ為功率放大單元的時間常數。
1.6 同步發(fā)電機勵磁系統(tǒng)建模
同步發(fā)電機勵磁控制系統(tǒng)的總框圖可用圖 2來表示。

圖2 勵磁控制系統(tǒng)總傳遞函數模型Fig.2 total transfer function model of excitation control system
2 常規(guī)PID勵磁控制器設計
將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,對被控對象進行控制的控制器被稱為PID控制器。模擬PID控制算法和數字PID控制算法是PID控制算法中兩種不同類型的算法,分類的依據是按照信號類型輸入與輸出的不同進行劃分。
PID控制器是根據給定的輸入值r(t)與現實的系統(tǒng)輸出值y(t)之間的偏差e(t)得到下面的PID控制規(guī)律,并得到其傳遞函數:


式(5)-(7)中:Kp為比例系數,Ki為積分系數,Kd為微分系數,Ti為積分環(huán)節(jié)時間常數,Td為微分環(huán)節(jié)時間常數。
2.1 模擬PID控制算法
模擬PID控制系統(tǒng)的原理圖見圖3。

圖3 模擬PID控制原理圖Fig.3 analog PID control schematic
2.2 數字PID控制算法
隨著時代的發(fā)展,實際應用與計算機常常有著緊密的聯(lián)系,控制過程常常只能采用某一時刻的偏差量進行計算,離散化是數字控制中一項重要的步驟,綜上,數字PID控制系統(tǒng)如圖4所示。

圖4 數字PID控制系統(tǒng)原理圖Fig.4 principle diagram of digital PID control system
2.3 PID參數整定
PID參數的整定在勵磁控制系統(tǒng)中起著至關重要的作用,合適的參數選取才能達到很好的控制作用,不合適參數的應用反而會適得其反,整定過程中方法與原則的選取很重要,在整定參數的過程中,系統(tǒng)的兩大特性動態(tài)與靜態(tài)性能與控制器的參數有著緊密的聯(lián)系,它們之間會相互制約,需要進行大量的實驗驗證,多次進行調整,達到合適的控制效果為止。其中最重要的就是如何根據系統(tǒng)中出現的性能情況去調節(jié)比例、積分以及微分環(huán)節(jié)這三個環(huán)節(jié)的參數。
在保障勵磁系統(tǒng)安全的情形下,初始參數的設置應相對穩(wěn)妥,不應過大或過小,如比例系數的設置不宜過大,積分時間不宜過小等,避免系統(tǒng)出現異常情況,導致系統(tǒng)的不穩(wěn)定。初始給定一個階躍信號,系統(tǒng)空載運行,根據輸出波形可以大致得到一些有關于勵磁系統(tǒng)性能信息,比如超調量和調節(jié)時間,此時應該依據兩者之間的關系,多次去調節(jié)PID的參數[6]。
若從響應曲線中觀察得知系統(tǒng)不穩(wěn)定,調節(jié)時間過長,與給定信號之間偏差較大,或者需要多次震蕩環(huán)節(jié)才能達到相對穩(wěn)定的狀態(tài),此時采取的方法是適當的使比例系數變小、使積分時間增大。在響應過程中,若響應曲線出現上升太慢,調節(jié)時間太長,應按對比上面參數調整規(guī)則進行反向調整。如果系統(tǒng)在減小誤差的過程中調節(jié)速度較慢,可以使積分時間縮短。
在多次調節(jié)Kp和Ti之后,如果超調量仍然較大,應該在控制環(huán)節(jié)中加入適當的微分環(huán)節(jié)進行一定的控制,Ti逐漸增大,多次調節(jié)勵磁控制器三個環(huán)節(jié)的參數,使系統(tǒng)的動態(tài)以及靜態(tài)性能達到最優(yōu),即找到合適的控制參數。總之,PID參數的調整是個復雜過程,多個參數之間相互作用,相互制約,進行多次的嘗試與調整,再進行觀察分析是非常重要的。
3 系統(tǒng)仿真實驗與結果分析
3.1 Simulink環(huán)境下建立同步發(fā)電機勵磁控制系統(tǒng)的仿真模型
本節(jié)在第一章的基礎上,采用各個單元簡化的傳遞函數構建仿真模型,運行Matlab軟件,打開Simulink工具包,創(chuàng)建同步發(fā)電機勵磁控制系統(tǒng)模型。相關參數的選取如下:
同步發(fā)電機:TG=6.5s,KG=1.0;
電壓測量比較單元:TR=0.04s,KR=1.0;
綜合放大單元:TA=0s,KA=50;
功率放大單元:TZ=0.067s,KZ=1.0。
根據第一章同步發(fā)電機勵磁控制系統(tǒng)建立的模型,以及上面相關參數的選取,搭建的仿真圖如圖5所示。

圖5 勵磁控制系統(tǒng)仿真模型圖Fig.5 simulation model of excitation control system
3.2 Simulink環(huán)境下建立同步發(fā)電機PID勵磁控制系統(tǒng)的仿真模型
在上面建立的模型的基礎上增加PID調節(jié)環(huán)節(jié),在Simulink環(huán)境下建立PID勵磁控制系統(tǒng)仿真模型圖,仿真模型圖如圖6所示,根據第二章中PID參數整定的規(guī)則多次實驗,選取PID三個參數的數值為:Ki=0.3,KP=1.3,Kd=0.06。

圖6 PID勵磁控制系統(tǒng)仿真模型圖Fig.6 simulation diagram of conventional PID excitation control system
3.3 仿真結果比較分析
采用階躍信號作為信號輸入來模擬同步發(fā)電機的空載運行,并對無PID勵磁控制系統(tǒng)以及帶有PID控制的勵磁控制系統(tǒng)進行仿真,仿真結果如圖7和圖8所示。

圖7 無PID勵磁控制系統(tǒng)仿真結果Fig.7 simulation results of PID-free excitation control system

圖8 PID勵磁控制系統(tǒng)仿真結果Fig.8 simulation results of PID excitation control system
觀察兩個仿真圖,從圖7中發(fā)現在無PID的勵磁控制系統(tǒng)中,出現了超調量并且較大,存在著一定的不穩(wěn)定性并且穩(wěn)定之后與給定階躍信號之間也存在著一定的偏差。相較于無PID控制的勵磁控制系統(tǒng),加入PID調節(jié)后超調明顯減小,并且更加穩(wěn)定,調節(jié)時間與其相比也明顯變小,提高了響應速度,并且穩(wěn)定之后與給定值基本無偏差,說明勵磁控制在加入PID控制之后可以明顯提高系統(tǒng)性能。
4 結論
本文對同步發(fā)電機的勵磁控制系統(tǒng)的PID控制器參數進行了優(yōu)化,并對每個部分進行了建模,為后面的仿真奠定了基礎,完成了PID勵磁控制系統(tǒng)的設計,在 Simulink環(huán)境下進行了仿真實驗,同時與無PID勵磁控制系統(tǒng)在同樣的條件下的仿真結果進行了對比分析,分析結果表明 PID控制下的勵磁控制系統(tǒng)擁有良好的控制效果與可實施性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
故事作文·高年級(2021年12期)2021-12-21 02:32:35
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
大電機技術(2017年3期)2017-06-05 09:36:02
光學精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
核科學與工程(2015年4期)2015-09-26 11:59:03
電力工程技術(2014年1期)2014-03-20 14:19:06