
追越過程中的船舶避讓行為反演分析
2021-12-12 08:49:30黎法明胡甚平劉明明
艦船科學技術 2021年11期
關鍵詞:船舶
黎法明,胡甚平,劉明明
(1.廣東交通職業技術學院 海事學院,廣東 廣州 510800;2.上海海事大學 商船學院,上海 201306)
0 引 言
海上航行中所有事故類型中,船舶碰撞事故比例較高且后果嚴重,因此,長期以來船舶碰撞事故及其致因機理研究普遍得到重視。李珊珊等[1]基于Petri網的方法及船舶碰撞事故調查報告構建了船舶碰撞事故致因分析網對碰撞事故進行再現。Kang等[2]利用大量的基于海事仿真的數據(MSBD)和自動識別系統(AIS)數據對船舶正面碰撞事故進行了研究。吳伋等[3]利用R語言和文本挖掘方法對內河碰撞事故進行了研究。張磊等[4]利用有限元仿真技術對船舶碰撞事故進行了反演。李杰等[5]對國內船舶碰撞事故科研產出及主題趨勢進行了挖掘,熱點主要分布在船舶避碰、碰撞事故、碰撞危險等方面,但有關碰撞事故尤其是因追越而產生的碰撞反演研究不多。本文基于典型案例對追越過程中船舶避讓行為進行了反演分析,從而得出船舶避碰尤其是多船會遇時最佳避碰策略和關鍵行為執行時機。
1 案例與情境分析
某年1月4日約0119時,在舟山桃花島燈樁東南距離約 11 nm 水域(即 29°37.7′N/122°28.3′E)2 艘商船發生碰撞。其中,Z輪總長88.10 m,型寬13.50 m,型深6.50 m;H輪總長135.80 m,型寬20.00 m,型深10.50 m。當時天氣東北風5~6級,風浪2~3級,能見距離約6 nm。海域流向西南,流速約1.5 kn。船舶會遇過程中還有另外2艘外輪,見圖1。

圖1 船舶追越過程中的位置和距離分析Fig.1 Analysis of position and distance during ship overtaking
Z輪航向200°,航速12.3 kn。0110時,距離右舷東行外輪F輪約0.5 nm,采取右舵10°避讓措施,并用VHF/16通報左船尾的追越船減速避讓,同時將車速由進三降至進二;0112時,因F輪以0.4 nm通過船首,左舵1 0°返回原航向,并將車速恢復至進三;0114時,發現右舷約70°另一東行外輪S輪(AIS顯示航速21 kn、距離約1.0 nm)存在碰撞危險,將車速調整至進二,并左舵10°避讓,采取行動前未與H輪聯系;約90 s后,Z輪近距離穿越H輪船首;0118時左右,發現右舷的H輪朝本船轉向,并聽到VHF16中急呼“向左、向左”,即令回舵、左舵、并減速;0119時左右,停車,船首右舷No1貨油艙前部碰撞。0120時左右,兩船首分離,隨即船尾相碰。
H輪航向202°,航速10.7 kn。0110時,航向212°以避讓東行商船F輪,此時Z輪在VHF/16呼叫示意本船減速避讓,提醒注意,同時H輪要求從Z輪左舷追越,并得到回答允許;0112時,東行外輪距離0.8 nm過船首,調整航向到210°;0114時發現右舷距離0.365 nm的Z輪大幅度向左轉向,VHF呼叫未應答,即采取停車措施;約90 s后,Z輪從H輪穿越船首;0118時左右,發現右前方另一東行外輪S輪距離約0.6 nm,存在碰撞危險,即下令左舵20°避讓;0119時左右,發現距離左舷Z輪很近,又改令右滿舵并全速倒車,但船首尚未右轉,左側船首已與Z輪右舷貨油艙前部發生碰撞,碰撞夾角成約20°。0120時,兩船船首分離,命停車,隨即Z輪右舷船尾與H輪左側駕駛臺前部主甲板舷墻護板再次碰撞。
2 追越過程中會遇船舶的行動
在整個追越過程中,針對船舶的相互位置、速度關系和碰撞危險的數據分析,可以看到確定Z輪為被追越船,H輪為追越船。在已獲得的AIS數據還原后(見圖2),可以得到:

圖2 追越過程中兩船避讓行為分析Fig.2 Analysis of the avoidance behavior of two ships in the process of overtaking
1)在整個會遇過程中,兩船均發現距離2 nm左右、速度在21 kn的另外2艘大型船舶,均位于Z輪和H輪的右舷,在隨后的過程中兩船均安全駛過。
2)對于追越船H輪,避讓交叉局面下第1艘高速船的避讓行為客觀上造成了緊迫局面的形成;恢復航向的船舶狀態進一步引發緊迫危險局面的形成;避讓交叉局面下第2艘高速船的避讓行為客觀上在此加速了緊迫危險局面;最有助于避碰的行動則是對本船左舷的船舶實施了“左轉減速”,導致碰撞的發生。
3)對于被追越船Z輪,避讓交叉局面下第1艘高速船的避讓行為客觀上造成了緊迫局面的形成,同時被追越船違反保速保向的規定,但使得DCPA好轉;隨后恢復航向(左轉增速)的船舶狀態則引發緊迫危險局面的形成,DCPA由0.4減少至0.1;避讓交叉局面下第2艘高速船的客觀行為“左轉增速”(主觀意愿上左轉減速)加速緊迫危險局面的形成,使得原本已從左舷側通過船尾的追越船再次從右舷側過船首。最有助于避碰的行動則是對本船右舷的船舶實施了“右轉減速”,導致碰撞的發生。
基于以上情景,分析如下:
1)緊迫局面存在階段的避讓
船舶追越由于是兩船速度差下的緩慢過程,追越過程比較長。0025時,兩船相距1.3 nm,速度差為1.5 kn,航向交叉角5°,兩船的DCPA=0.4 nm,TCPA=66 min。兩船接近至0.8 nm時,兩船的DCPA=0.4 nm,TCPA=25 min。倘若被追越船能保速保向,避讓時機也許還是很寬裕的。但由于被追越船避讓交叉局面的高速船F輪,兩船間的相對會遇關系發生變化,導致TCPA迅速降至5 min,被追越船迅速恢復船舶航向和船位。追越船需要作出相應的避讓決策,但是該船注意到的僅是同時的F輪,避讓行為實施后導致DCPA達到0.5 nm,后調整航向使得DCPA減少到0.4 nm。兩船不恰當的行動導致了緊迫危險的形成。
2)緊迫危險存在階段的避讓
兩船接近0.3 nm,此時DCPA=0.1 nm,TCPA=4 min。此時兩船位置都在正橫附近。此時兩船距離已近,碰撞難以避免。兩船忙于恢復航向和船位,被追越船和追越船都不恰當的“最有助于避碰的行動”,對同側船舶實施了同向的轉向,被追越船距離141.3 m通過追越船的船首。經過前面的追越,兩船互換了位置關系。雖然兩船均有減速停車,但碰撞已經無法避免。
3 引發的相關問題討論
1)多船會遇下的避讓決策
本案例屬于多船會遇情況,涉及到4艘船舶,會遇形成的局面分別是H輪與F輪、S輪均分別構成交叉局面,H輪為讓路船;Z輪與F輪、S輪均分別構成交叉局面,S輪為讓路船。Z輪與H輪構成被追越船和追越船。在整個過程中,Z輪與H輪對于2艘外輪的避讓如圖3所示。

圖3 兩船對于高速船的避讓行為分析(上圖為Z輪,下圖為H輪)左側為F輪,右側為S輪;虛線“□”為TCPA,虛線“*”為DCPA,實線為兩船間距離D)Fig.3 Analysis of the avoidance behavior of the two ships against the high-speed ship (the left picture is wheel Z, the right picture is wheel H, the left is wheel F, and the right is wheel S; the dotted line □ is TCPA, and the dotted line * is DCPA,The solid line is the distance between the two ships D)
2)大型船的避讓
隨著船舶大型化和高速化的發展,船舶航速大幅度提高。本案例中2艘一般速度(10 kn)的商船面對大型船(船速高于20 kn)的避讓行為表現出一定的代表性,具體見圖4和圖5。
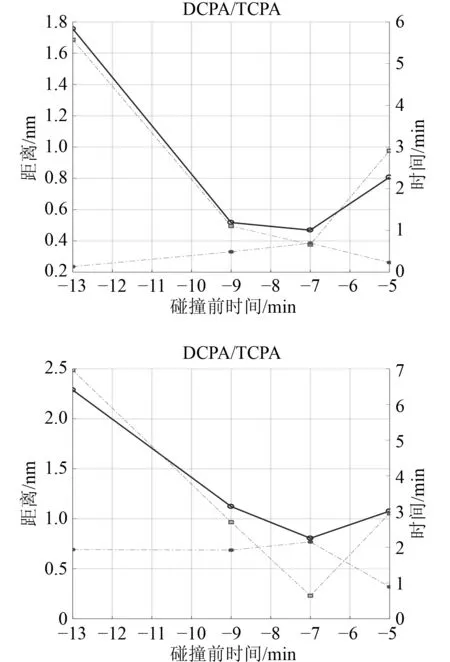
圖4 與高速船A的船舶會遇過程中兩船的行動效果分析(左圖為Z輪,右圖為H輪,對方為F輪;虛線“□”為TCPA,虛線“*”為DCPA,實線為D)Fig.4 Analysis of the action effects of the two ships during the encounter with the high-speed ship A(the left picture is wheel Z, the right picture is wheel H, and the other side is wheel F; the dotted line □ is TCPA, and the dotted line * is DCPA,and the actual Line is D)
Z輪與H輪兩船對于F輪的相遇,DCPA分別為0.2 nm,0.6 nm,實施避讓行動時TCPA分別為5.5 min和3 min,F輪過兩船船首時間都在0112。顯然,船舶相距很近,且避讓時機均太晚。右轉減速對于TCPA改變的影響不明顯。Z輪與H輪兩船對于S輪的相遇,DCPA分別為0.55 nm、0.45 nm,實施右轉減速避讓行動時TCPA分別為3 min和2 min,S輪最終距兩船碰撞點0.5 nm,無避讓效果。顯然,船舶相距較近,且避讓時機均太晚。
3)安全會遇距離[6]的設定
設DCPAs=0.5 nm,從各艘船通過的最后效果,尤其是交叉局面下高速船通過的DCPA來看,普通駕駛員普遍認為DCPA≤1 nm,認為存在碰撞危險,只有DCPA≤0.5 nm,才需要采取避讓行動。同時避讓的效果也就是安全會遇距離也選擇0.5 nm為目標。隨著船舶大型化,2艘300 m的船舶會遇距離就要達到D=0.33 nm。案例中,H輪和Z輪對于S輪的避讓沒有注意到(當時船舶都在避讓F輪),在隨后的航向與航速無論如何變化,DCPA都在0.5 nm以上(見圖5)。

圖5 與高速船B的船舶會遇過程中兩船的行動效果分析(上圖為Z輪,下圖為H輪,對方為S輪)虛線“□”為TCPA,虛線“*”為DCPA,實線為D)Fig.5 Analysis of the action effects of the two ships during the encounter with the high-speed ship B(the left picture is wheel Z, the right picture is wheel H, and the other side is wheel S; the dotted line □ is TCPA, the dotted line * is DCPA, and the actual Line is D)
4)避讓時機
2艘船舶在整個情境中不論交叉局面、追越局面下,避讓時機[7]均遠小于TCPA=5 min。避碰規則要求的“早讓”,一般地,一定要在TCPA≥10 min。前海上交通態勢下,絕大多數駕駛員在TCPA=12~14 min采取行動被認為是可以接受的。案例表明:TCPA=3~4 min時,實際上無法實現有效的避讓。Z輪避讓F輪就是如此,實施2次避讓行為(右轉45°,減速1/3)后,DCPA在6 min內達到由0.2 nm增加至0.4 nm。雖然H輪和Z輪對于S輪的避讓沒有注意到(當時船舶都在避讓F輪),但在客觀上造成對S輪的避讓都在TCPA=10 min以前完成,在隨后的航向與航速不論何種變化,S輪是安全通過的(見圖5)。
5)會遇局面對避讓行為的影響
對追越船H輪而言,追越條款優先,在實際行為中沒有落實;對被追越船Z輪,交叉局面的避讓幅度太小,違背了“一連串的小的改向”原則。
6)會遇避讓與恢復航線的決策[8]
對于規則中提出的“駛過讓清”理解為會遇避讓與恢復航線的依據。案例中的H輪和Z輪對于F輪的避讓后,待F輪過船首,均客觀上(Z輪是駕駛員明確的)都迅速實施了恢復航向的行為,不僅造成對于F輪的DCPA減小,且相互的DCPA銳減至0.2 nm,此時TCPA為3.5 min。雖然兩船分別過船頭或船尾,但是最終兩船碰撞,兩船的兩次避讓行為均沒有滿足“駛過讓清”。
4 結 語
在復雜的海上交通環境中,船舶會遇的情境也是復雜多變。國際避碰規則要求追越條款具有優先適用權,追越船需要遵守讓路船的行動規定,及早地寬裕讓清被追越船。該義務不論隨后兩船間的方位發生何種變化,追越船仍要主動讓路。通過案例反演,值班駕駛員不僅要做好瞭望、安全航速和碰撞危險等航行戒備,而且要做好多船會遇下的避碰決策,謹慎處理好“駛過讓清”與恢復航向航線之間的關系。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
