旋轉(zhuǎn)式無(wú)線充電系統(tǒng)偏移特性研究
2021-12-13 07:32:26程志遠(yuǎn)李東東邵會(huì)文
電工技術(shù)學(xué)報(bào) 2021年22期
關(guān)鍵詞:實(shí)驗(yàn)系統(tǒng)
程志遠(yuǎn) 陳 坤 李東東 李 崢 邵會(huì)文
(上海電力大學(xué)電氣工程學(xué)院 上海 200090)
0 引言
無(wú)線電能傳輸技術(shù)(Wireless Power Transfer,WPT)因其具有較高的安全性、靈活性和可靠性而被廣泛應(yīng)用于水下用電設(shè)備、生物醫(yī)療、電動(dòng)汽車和無(wú)人機(jī)等各個(gè)領(lǐng)域[1-6]。
目前,作為人類探索海洋環(huán)境的重要水下設(shè)備——自動(dòng)水下航行器(Autonomous Underwater Vehicles, AUV)普遍采用直接接觸式傳能方式,存在漏水、漏電等重大安全隱患。而無(wú)線電能傳輸技術(shù)因其采用非物理接觸式實(shí)現(xiàn)能量傳輸,具有安全性高、環(huán)境適應(yīng)性強(qiáng)等優(yōu)點(diǎn),可作為解決這一問(wèn)題的有效手段[7-8]。典型的無(wú)線電能傳輸工作原理如圖1 所示。交流電源經(jīng)工頻不控整流產(chǎn)生直流母線電壓,后經(jīng)逆變電路產(chǎn)生高頻交流電,通過(guò)諧振網(wǎng)絡(luò)由LCT 將能量傳遞至副邊,最后經(jīng)諧振補(bǔ)償網(wǎng)絡(luò)及高頻整流環(huán)節(jié)實(shí)現(xiàn)負(fù)載供能。
圖1 WPT 系統(tǒng)工作原理Fig.1 Working principle of WPT system
AUV 在水下進(jìn)行無(wú)線充電過(guò)程中大多采用籠狀對(duì)接系統(tǒng),但由于水壓與洋流的干擾可能發(fā)生軸向偏移[9],與充電裝置之間的相對(duì)位置發(fā)生未對(duì)準(zhǔn)的情況,進(jìn)而對(duì)互感與耦合系數(shù)產(chǎn)生影響[10]。文獻(xiàn)[11]研究了電動(dòng)汽車上平面方形線圈橫向偏移對(duì)互感的影響,并對(duì)線圈進(jìn)行了抗橫向偏移優(yōu)化,同時(shí)采用串-串拓?fù)浞€(wěn)定系統(tǒng)輸出。文獻(xiàn)[12]為解決無(wú)線電能傳輸中由于線圈未對(duì)準(zhǔn)而引起傳輸效率降低的問(wèn)題,提出了一種太極線圈結(jié)構(gòu),通過(guò)與其他線圈對(duì)比,驗(yàn)證了太極線圈具有較高的抗偏移性。文獻(xiàn)[13]設(shè)計(jì)了一種抗偏移性能優(yōu)異的電動(dòng)汽車用WPT 系統(tǒng),該系統(tǒng)采用扁平螺線管的磁耦合結(jié)構(gòu),具有非常突出的抗橫向偏移性能。但這兩種結(jié)構(gòu)用于AUV 在水下進(jìn)行無(wú)線充電時(shí)兼容性較差,將提高建造成本。文獻(xiàn)[14]提出了適用于動(dòng)態(tài)無(wú)線充電的原邊側(cè)T 型補(bǔ)償拓?fù)浣Y(jié)構(gòu)及參數(shù)設(shè)計(jì)方法,該補(bǔ)償拓?fù)渑c設(shè)計(jì)方法具有在較大偏移范圍內(nèi)仍保持傳輸功率穩(wěn)定的特性。目前,AUV 水下充電過(guò)程中需進(jìn)行旋轉(zhuǎn)對(duì)位,且容易發(fā)生旋轉(zhuǎn)不對(duì)準(zhǔn)的情況。故文獻(xiàn)[15]提出了一種具有反向纏繞接收器并兼容AUV 外形的線圈結(jié)構(gòu),該結(jié)構(gòu)在發(fā)射器線圈與接收器線圈之間發(fā)生旋轉(zhuǎn)未對(duì)準(zhǔn)的情況下,具有較為良好的傳輸性能。文獻(xiàn)[16]提出了一種適用于AUV 水下充電的磁耦合結(jié)構(gòu)——旋轉(zhuǎn)式松耦合變壓器 (Loosely Coupled transformer, LCT) 結(jié)構(gòu),該結(jié)構(gòu)在不改變AUV 自身形狀的前提下,實(shí)現(xiàn)靈活的機(jī)械對(duì)位,以相對(duì)較低的成本有效避免了旋轉(zhuǎn)未對(duì)準(zhǔn)的情況。但文中未對(duì)所提結(jié)構(gòu)進(jìn)行互感耦合的理論分析和偏移特性分析。然而互感耦合與偏移特性對(duì)于無(wú)線電能充電系統(tǒng)而言是十分重要的參數(shù)和特性,其會(huì)對(duì)系統(tǒng)的傳輸能力及傳輸效率產(chǎn)生影響,故本文對(duì)耦合系統(tǒng)的互感及偏移特性展開(kāi)分析。
本文針對(duì)旋轉(zhuǎn)LCT 發(fā)生軸向偏移對(duì)互感、自感、耦合系數(shù)、輸出功率及傳輸效率產(chǎn)生的影響展開(kāi)研究。首先給出了基于LCL_S 補(bǔ)償結(jié)構(gòu)WPT 系統(tǒng)輸出功率與互感M的關(guān)系,并推導(dǎo)了旋轉(zhuǎn)LCT的互感計(jì)算模型,在此基礎(chǔ)上通過(guò)仿真對(duì)軸向偏移、副邊線圈長(zhǎng)度、互感、輸出功率及效率之間的關(guān)系進(jìn)行了分析,最后搭建一套WPT 樣機(jī)對(duì)理論分析結(jié)果進(jìn)行了實(shí)驗(yàn)驗(yàn)證。
1 WPT 系統(tǒng)建模與分析
1.1 旋轉(zhuǎn)LCT 結(jié)構(gòu)
旋轉(zhuǎn)LCT 結(jié)構(gòu)如圖2 所示。原邊側(cè)鐵氧體磁心在最外側(cè),副邊鐵氧體磁心在最內(nèi)側(cè);副邊線圈嵌套于原邊側(cè)線圈內(nèi)。為了減少鄰近效應(yīng)與趨膚效應(yīng),原副邊線圈均由利茲線繞制而成。該結(jié)構(gòu)在不改變AUV 外形的條件下安裝于AUV 外表面,且在AUV航行過(guò)程中不會(huì)造成額外阻力。

圖2 旋轉(zhuǎn)LCT 結(jié)構(gòu)Fig.2 Rotary LCT structure
本文設(shè)計(jì)的籠狀對(duì)接無(wú)線充電系統(tǒng)如圖 3 所示。其中,LCT 原邊側(cè)部分安裝于籠狀對(duì)接裝置,LCT 副邊部分安裝于AUV 中部。采用該種對(duì)接裝置可使AUV 在水下無(wú)線充電過(guò)程中極大地避免了徑向偏移情況的發(fā)生,LCT 副邊安裝于AUV 中部,有效地避免了傳能過(guò)程中對(duì)AUV 前后端通信系統(tǒng)及高精度傳感器等關(guān)鍵部件的電磁干擾。AUV 充電過(guò)程如下:當(dāng) AUV 需補(bǔ)充電能時(shí),首先通過(guò)導(dǎo)航系統(tǒng)將AUV 引入籠狀對(duì)接裝置,同時(shí)發(fā)出充電信號(hào),水下無(wú)線充電系統(tǒng)開(kāi)始對(duì)AUV 進(jìn)行電能補(bǔ)給。
圖3 AUV 籠狀對(duì)接無(wú)線充電系統(tǒng)Fig.3 AUV cage-like docking wireless power transfer system
1.2 LCL_S 型WPT 系統(tǒng)分析
圖4 為本文所采用的基于旋轉(zhuǎn)LCT 結(jié)構(gòu)無(wú)線充電系統(tǒng)電路拓?fù)浣Y(jié)構(gòu),其中UD為經(jīng)工頻不控整流轉(zhuǎn)換的直流輸入電源,S1、S2、S3、S4開(kāi)關(guān)管構(gòu)成H 橋高頻逆變電路,Cp、Cs為原、副邊諧振補(bǔ)償電容,VD1、VD2、VD3、VD4為副邊高頻整流二極管,Cf為濾波電容,RL為負(fù)載,LCT 原、副邊均采用圓筒磁心結(jié)構(gòu)。
圖4 系統(tǒng)拓?fù)銯ig.4 System topology
式中,ω0為諧振角頻率。根據(jù)電壓與電流方程,可得出原、副邊工作在諧振狀態(tài)下各電流表達(dá)式為
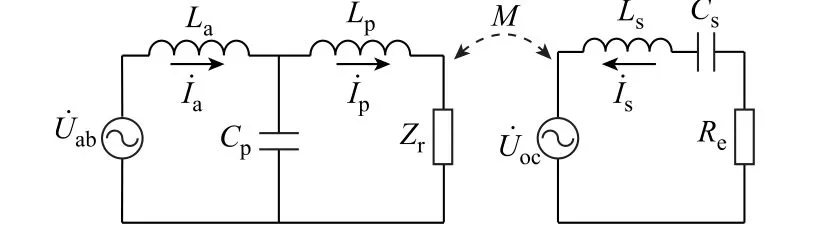
圖5 LCL_S 型WPT 系統(tǒng)等效電路Fig.5 Equivalent circuit of LCL_S type WPT system
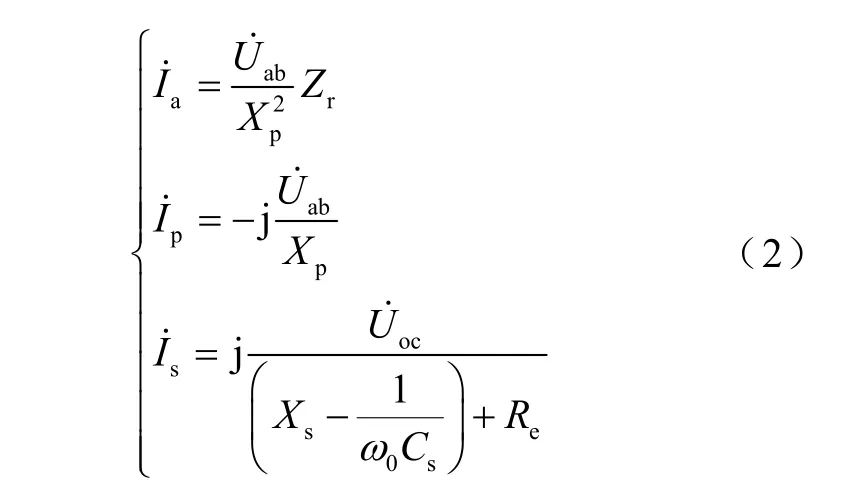
式中,Xp、Xs分別為原、副邊電抗;Zr、Xp及Xs表達(dá)式為
對(duì)于副邊采用串聯(lián)補(bǔ)償結(jié)構(gòu)的WPT 系統(tǒng),式(3)中的Re為

綜合式(1)~式(4),可得到系統(tǒng)的輸出功率Ps為

式中,k為耦合系數(shù),表達(dá)式為

對(duì)于能量傳輸系統(tǒng),效率是較為重要的參數(shù),由文獻(xiàn)[17]可得系統(tǒng)效率表達(dá)式為
從以上理論分析可知,互感M的變化會(huì)對(duì)無(wú)線電能傳輸系統(tǒng)中一些關(guān)鍵參數(shù)產(chǎn)生較大影響,如反映阻抗、耦合系數(shù)、效率及輸出功率等,因此本文重點(diǎn)針對(duì)互感變化對(duì)系統(tǒng)傳輸性能的影響展開(kāi)研究。
2 互感參數(shù)分析
圖6 為載流圓線圈空間中任意一點(diǎn)磁場(chǎng)計(jì)算模型。載流圓線圈的圓心為坐標(biāo)原點(diǎn)O;D(x,y,z)為磁場(chǎng)中任一點(diǎn)的坐標(biāo);D′(tcosα,tsinα,0)為D在xOy平面的豎直投影點(diǎn);α為投影點(diǎn)到原點(diǎn)的連線與x軸的夾角;載流元Idl與x軸的夾角為β;i、j、k分別為x、y、z軸方向的單位向量。則dl為
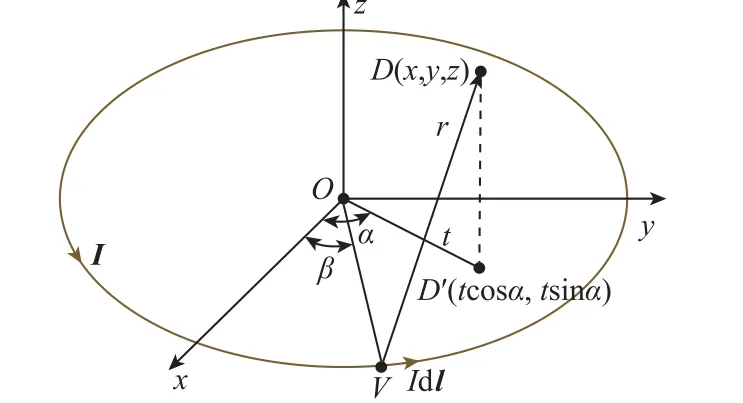
圖6 載流圓線圈空間任一點(diǎn)磁場(chǎng)計(jì)算模型Fig.6 Calculation model of magnetic field at any point in current carrying circular coil space
Idl到P點(diǎn)的距離為
由于載流圓線圈的磁場(chǎng)強(qiáng)度僅存在徑向分量與軸向分量[18],則
圖7 所示為一個(gè)長(zhǎng)為l1、半徑為R1的載流密繞螺線管內(nèi)部任一點(diǎn)磁場(chǎng)計(jì)算模型。本文所研究的原、副邊線圈均為密繞線圈,故忽略其匝間距。線圈匝數(shù)為N1,電流為Ip,單位長(zhǎng)度的匝數(shù)n1=N1/l1。由于螺線管中的磁場(chǎng)關(guān)于z軸對(duì)稱[19],故本文可對(duì)螺線管內(nèi)的一點(diǎn)磁場(chǎng)進(jìn)行如下求解。
圖7 載流螺線管內(nèi)部任一點(diǎn)磁場(chǎng)計(jì)算模型Fig.7 Calculation model of magnetic field at any point in current carrying solenoid
r為P點(diǎn)到螺線管軸線的垂直距離;z為P點(diǎn)在坐標(biāo)軸z上的投影點(diǎn)到坐標(biāo)原點(diǎn)的距離;在螺線管上取一段長(zhǎng)為dz′線圈元,匝數(shù)為n1,該段所通過(guò)的電流為Ipn1dz′,則由式(11)和式(12)可得

由式(16)可知,P點(diǎn)在螺線管線圈中的位置z發(fā)生變化時(shí),軸向磁感應(yīng)強(qiáng)度Bz的值將受到影響,同時(shí)r的改變將導(dǎo)致徑向偏移。由于本文不對(duì)徑向偏移進(jìn)行分析,故僅考慮軸向偏移的變化對(duì)互感的影響。
互感可定義為

式中,ψm為接收線圈的磁通量;Ip為接收線圈的電流。將單匝接收線圈置于圖7 所示螺線管內(nèi)部,由于徑向磁場(chǎng)將相互抵消,故其磁通量為
由式(20)、式(21)可得,M與原、副邊線圈的半徑、匝數(shù)、長(zhǎng)度及其相對(duì)位置密切相關(guān),且長(zhǎng)度越長(zhǎng)互感值越大。同時(shí)通過(guò)式(21)及式(16)可知,副邊線圈在原邊線圈內(nèi)部的相對(duì)位置發(fā)生變化即z′-z的絕對(duì)值發(fā)生變化,Bz和Dr受到影響。結(jié)合式(20)可知,互感M將發(fā)生改變,具體變化情況將在第3 節(jié)進(jìn)行分析。由文獻(xiàn)[20-21]可知,鐵氧體磁心可使線圈互感得到相應(yīng)的改善,依據(jù)文獻(xiàn)[4]所提仿真與曲線擬合的方法可確定鐵氧體磁心系數(shù)kc,該系數(shù)與螺線管線圈互感之積即為旋轉(zhuǎn)LCT 的互感值。
3 偏移特性分析
AUV 在水下充電過(guò)程中,由于受到強(qiáng)大的水壓與暗流的影響,導(dǎo)致其與對(duì)接裝置較容易發(fā)生軸向偏移,故本文將對(duì)多種不同情況的軸向偏移展開(kāi)分析,為后續(xù)旋轉(zhuǎn)式LCT 的開(kāi)發(fā)與應(yīng)用提供參考。由于AUV 充電系統(tǒng)中原邊充電裝置一般固定不變且改動(dòng)難度較大,故本文在做仿真分析時(shí)僅改變副邊磁心與線圈的長(zhǎng)度,且各側(cè)磁心與線圈均為等長(zhǎng),即齊平狀態(tài)。
表1 為原邊的仿真參數(shù)。表2 為副邊的仿真參數(shù),副邊磁心外徑均為48mm,磁心內(nèi)徑均為38mm,螺線管線圈半徑均為 44.5mm,利茲線線徑均為3.5mm。
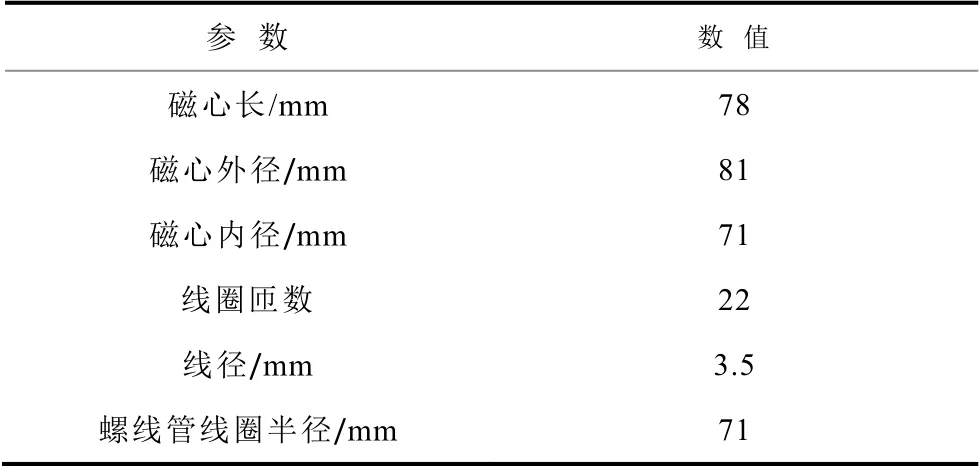
表1 原邊參數(shù)Tab.1 Primary side parameters
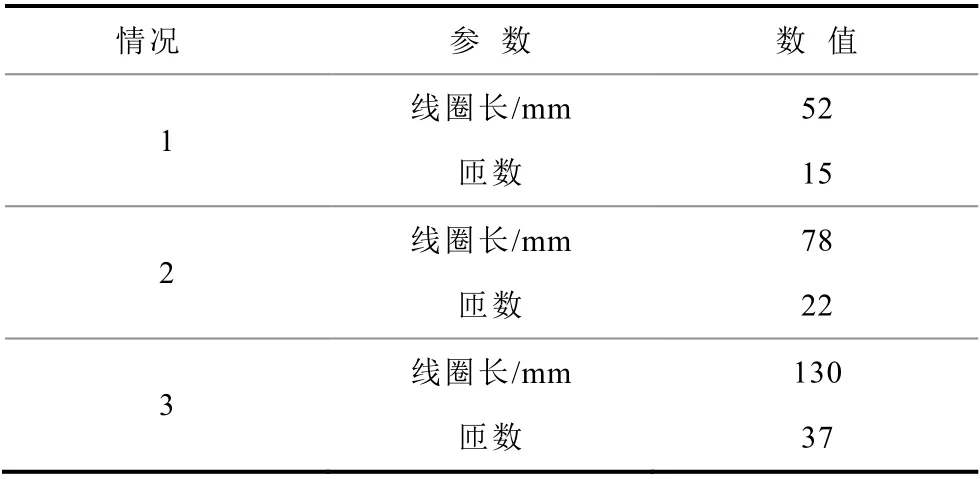
表2 副邊參數(shù)Tab.2 Secondary side parameters
圖8 為旋轉(zhuǎn)LCT 軸向偏移示意圖。圖8 中軸向偏移距離L為旋轉(zhuǎn)LCT 的副邊線圈相對(duì)原邊線圈較正對(duì)時(shí)軸向偏移出的距離。
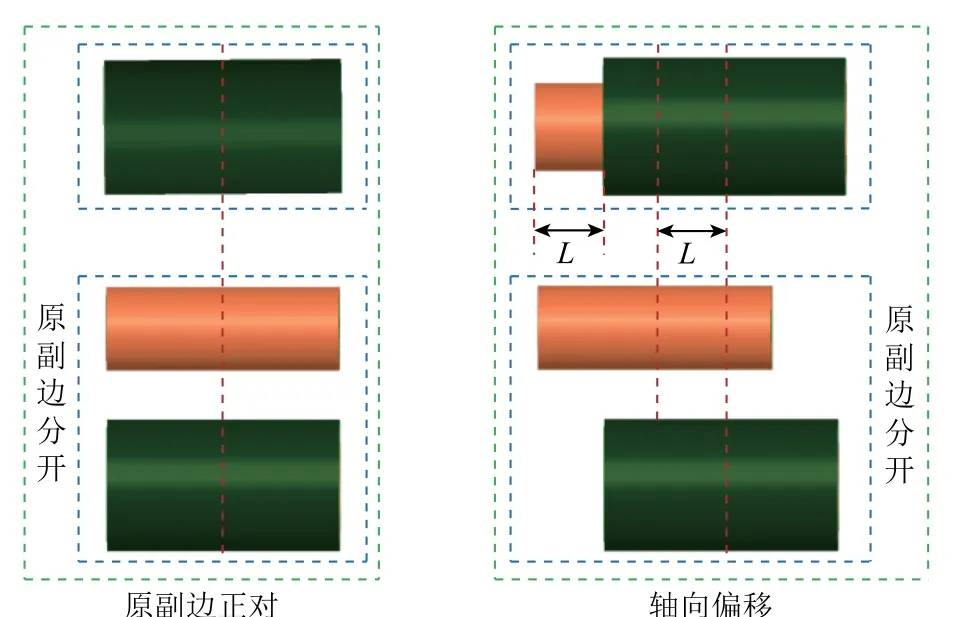
圖8 旋轉(zhuǎn)LCT 軸向偏移示意圖Fig.8 Schematic diagram of axial offset of rotary LCT
3.1 軸向偏移對(duì)互感的影響
下面將對(duì)三種不同副邊長(zhǎng)度的LCT 進(jìn)行軸向偏移分析,觀察在不同偏移狀態(tài)下,旋轉(zhuǎn)LCT 的互感與耦合系數(shù)的變化。
圖9 為旋轉(zhuǎn)LCT 副邊長(zhǎng)度為52mm 時(shí),原、副邊線圈互感、耦合系數(shù)與軸向偏移距離的關(guān)系圖。由圖9 可知,M與k均隨著L的增大而不斷減小,互感減小趨勢(shì)與耦合系數(shù)幾乎一致。這種現(xiàn)象表明,對(duì)副邊線圈長(zhǎng)度為52mm 的旋轉(zhuǎn)LCT 結(jié)構(gòu),隨著軸向偏移距離的增大,其耦合程度在不斷的降低。
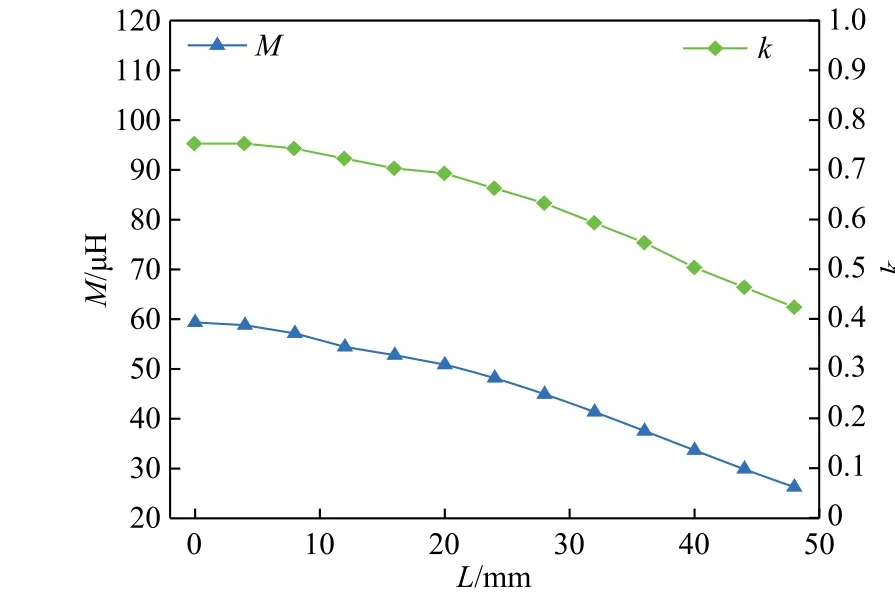
圖9 長(zhǎng)度為52mm 時(shí)軸向偏移Fig.9 Axial offset at 52mm length
圖10 為旋轉(zhuǎn)LCT 副邊長(zhǎng)度為78mm 時(shí),原、副邊線圈互感、耦合系數(shù)與軸向偏移距離的關(guān)系圖。此時(shí)原副邊線圈長(zhǎng)度相等,M與k均隨軸向偏移距離L的增大呈現(xiàn)先增大后減小的趨勢(shì),互感下降的幅度最為明顯,最小值為57.41μH。出現(xiàn)先增大現(xiàn)象的原因可能在于原邊螺線管線圈兩端存在稍大于其內(nèi)部場(chǎng)強(qiáng)的磁場(chǎng),使得LCT 的耦合程度提高。
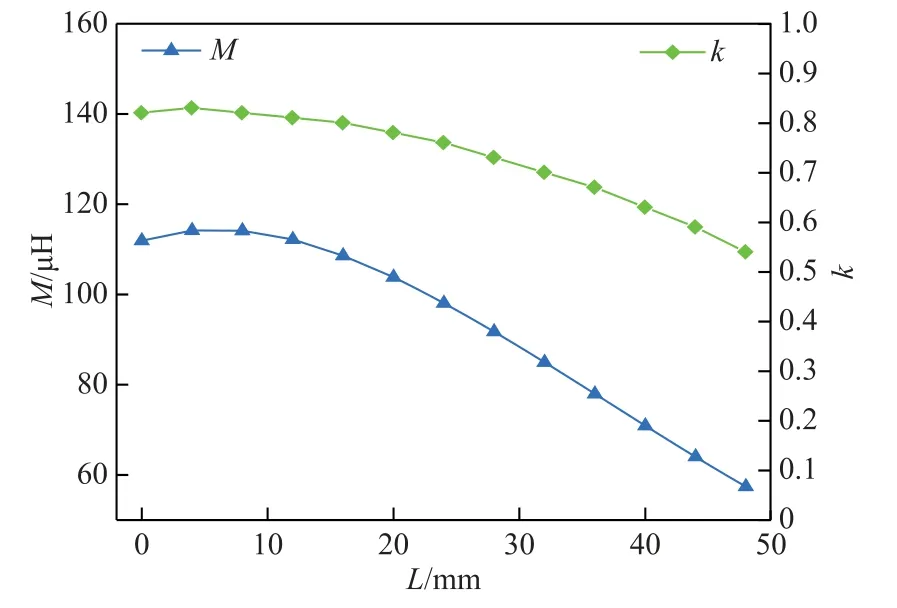
圖10 長(zhǎng)度為78mm 時(shí)軸向偏移Fig.10 Axial offset at 78mm length
圖11 為旋轉(zhuǎn)LCT 副邊長(zhǎng)度為78mm 時(shí),副邊線圈無(wú)偏移、偏移8mm 與偏移48mm 的磁場(chǎng)云圖。
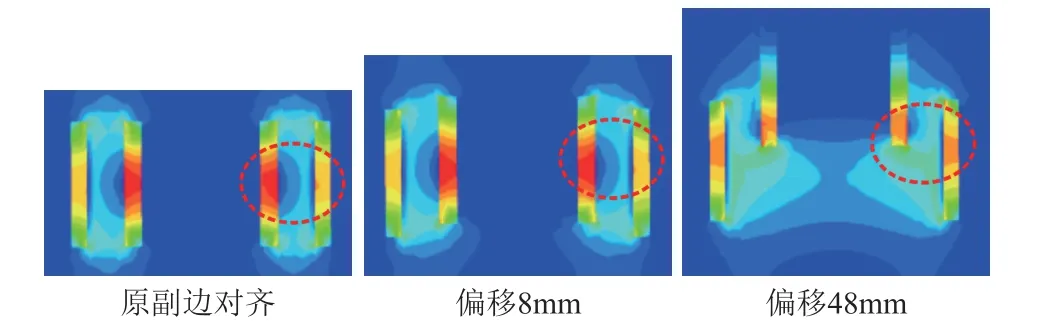
圖11 磁場(chǎng)云圖Fig.11 Magnetic field nephogram
由圖11 可知,副邊線圈偏移48mm 時(shí),原、副邊線圈之間的磁場(chǎng)較為發(fā)散,與之對(duì)應(yīng)的圖10 中此時(shí)互感值最小;副邊線圈偏移8mm 時(shí)的磁場(chǎng)較原副邊對(duì)齊情況略顯集中,與之對(duì)應(yīng)的圖10 中副邊線圈偏移8mm 的互感值略大于原、副邊線圈完全對(duì)齊的情況。
圖12 為旋轉(zhuǎn)LCT 副邊線圈長(zhǎng)度為130mm 時(shí),互感、耦合系數(shù)與軸向偏移距離的關(guān)系。隨著軸向偏移距離L的增大,M在不斷地減小。軸向偏移在0~12mm 范圍內(nèi)變化時(shí),k幾乎沒(méi)有變化;在12~48mm 范圍內(nèi)變化時(shí),k緩慢減小。
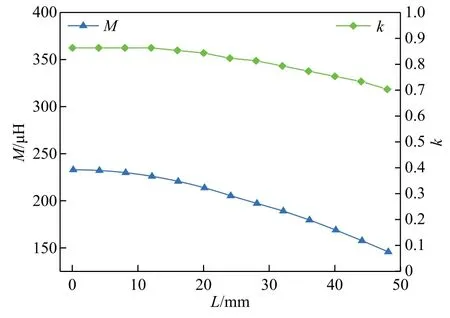
圖12 長(zhǎng)度為130mm 時(shí)軸向偏移Fig.12 Axial offset at 130mm length
由圖9~圖12 可知,互感值隨副邊線圈長(zhǎng)度的增大而增大,隨軸向偏移距離的增大而減小,與理論分析相一致。同時(shí),副邊線圈長(zhǎng)度越長(zhǎng),其耦合系數(shù)k受軸向偏移影響越小。
3.2 軸向偏移對(duì)輸出功率及效率的影響
由圖13 可知,對(duì)于副邊線圈長(zhǎng)度為130mm、78mm、52mm 的三種情況,在0~48mm 范圍內(nèi)發(fā)生軸向偏移,DC-DC 效率受軸向偏移影響很小,其值較為接近,分別穩(wěn)定在72%、75%、71%附近。
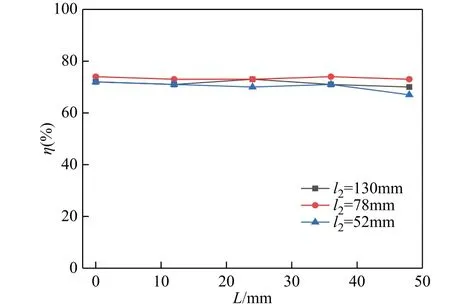
圖13 DC-DC 效率隨軸向偏移的變化Fig.13 Change of DC-DC efficiency vs. axial offset L
由圖14 可知,線圈長(zhǎng)度為130mm 的情況下,輸出功率受軸向偏移影響較長(zhǎng)度分別為78mm、52mm 的小,且長(zhǎng)度為78mm 的情況下,輸出功率隨軸向偏移的增大而下降的趨勢(shì)較長(zhǎng)度為52mm 的情況稍緩,即副邊線圈長(zhǎng)度越長(zhǎng),旋轉(zhuǎn)LCT 的輸出功率抗軸向偏移能力越強(qiáng)。
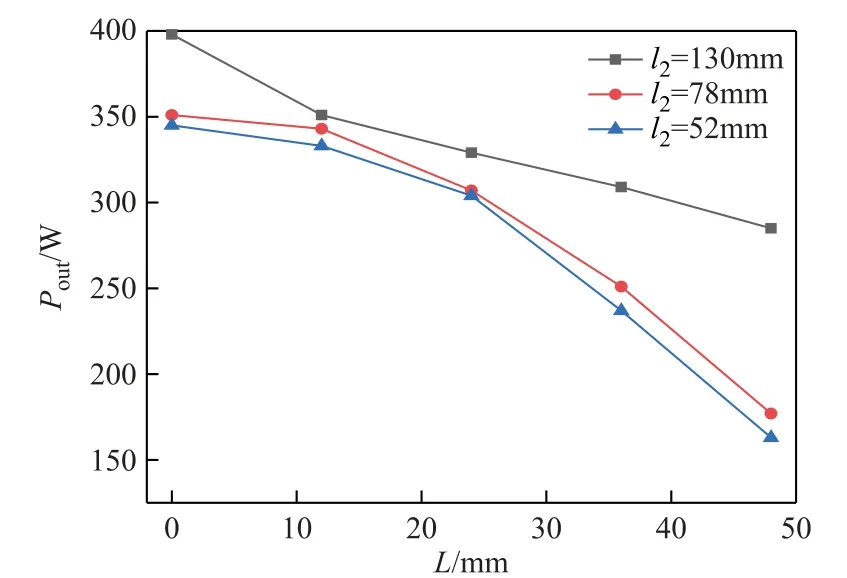
圖14 輸出功率變化Fig.14 Change of output power
4 仿真與實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證理論分析和結(jié)果的正確性,設(shè)計(jì)和開(kāi)發(fā)了一套基于LCL_S 補(bǔ)償結(jié)構(gòu)的無(wú)線電能傳輸系統(tǒng)樣機(jī),如圖15 所示。實(shí)驗(yàn)中采用JT6343A 直流電子負(fù)載,LW-10010KD 直流電源,系統(tǒng)所設(shè)計(jì)穩(wěn)定運(yùn)行的最大傳輸功率為1kW。實(shí)驗(yàn)參數(shù)見(jiàn)表1 與表2,系統(tǒng)諧振頻率為50kHz,諧振參數(shù)依據(jù)式(3)選取,實(shí)驗(yàn)中選取副邊長(zhǎng)度為130mm 線圈結(jié)構(gòu)進(jìn)行實(shí)驗(yàn)驗(yàn)證。圖16 為旋轉(zhuǎn)LCT 實(shí)物,圖中,副邊線圈長(zhǎng)度較原邊線圈長(zhǎng),副邊線圈匝數(shù)為37 匝。
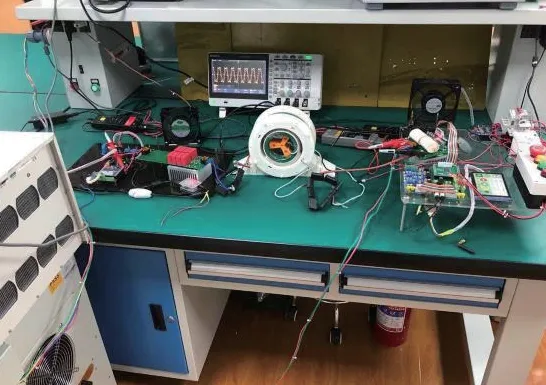
圖15 實(shí)驗(yàn)平臺(tái)Fig.15 Experimental platform
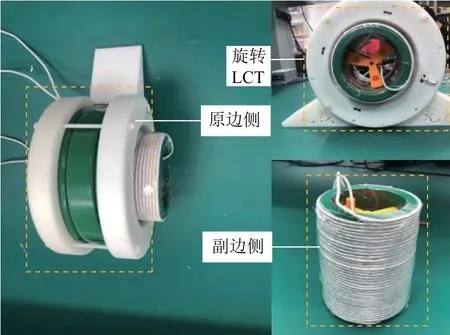
圖16 旋轉(zhuǎn)LCT 實(shí)物Fig.16 Physical of rotary LCT
圖17 為逆變輸出電壓、逆變輸出電流及負(fù)載輸出電壓、負(fù)載輸出電流的示波器波形。此時(shí)原、副邊側(cè)線圈偏移距離L為0,DC-DC 效率為72%。圖中逆變輸出電流滯后于逆變輸出電壓,主要在于計(jì)算補(bǔ)償參數(shù)時(shí)理論計(jì)算值與實(shí)際匹配值有誤差,以及副邊后級(jí)電路反射到原邊的等效電阻呈感性導(dǎo)致。
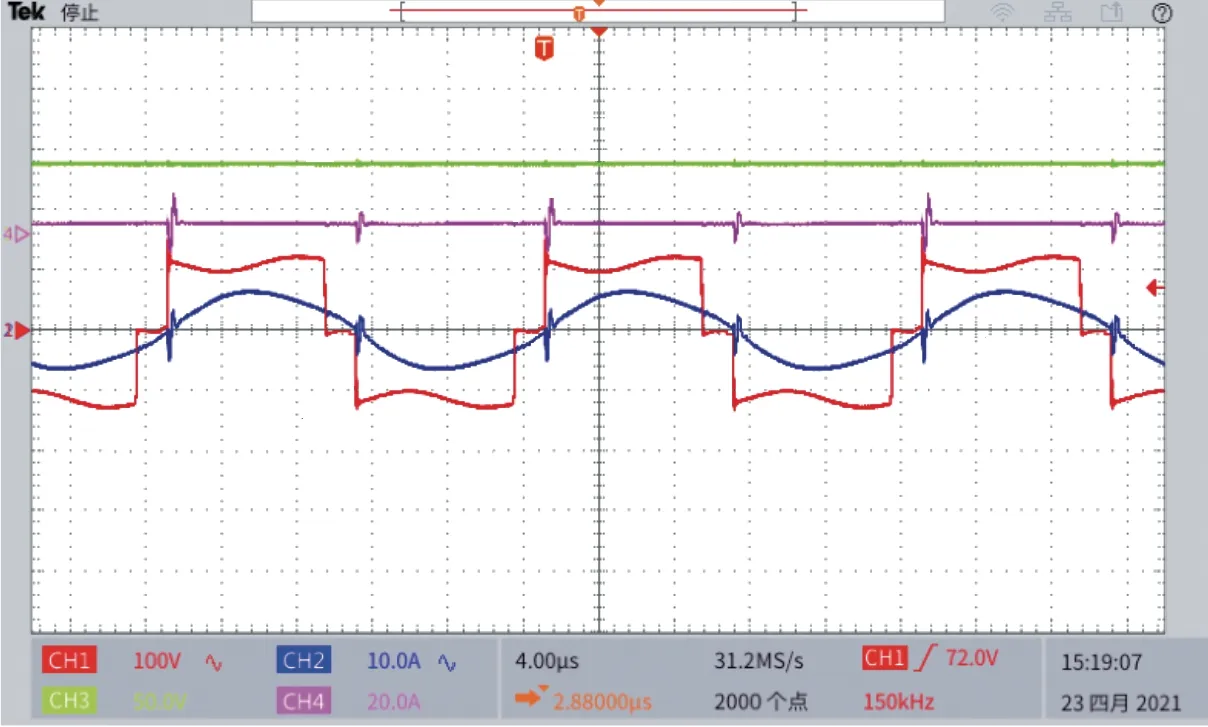
圖17 輸出電壓、電流波形Fig.17 Waveforms of output voltage and output current
圖18 為互感值的仿真計(jì)算實(shí)驗(yàn)對(duì)比,仿真結(jié)果與計(jì)算結(jié)果吻合的很好;在軸向偏移0~24mm 范圍內(nèi),實(shí)驗(yàn)值較仿真計(jì)算值小約 9%;在軸向偏移24~48mm 范圍內(nèi),實(shí)驗(yàn)值與仿真計(jì)算值偏差4%左右,均在允許的誤差范圍內(nèi)。存在誤差的主要原因在于線圈纏繞過(guò)程中,線圈之間存在空隙和纏繞不均勻的情況,而仿真與計(jì)算均假定線圈之間無(wú)空隙且均勻貼近磁心。
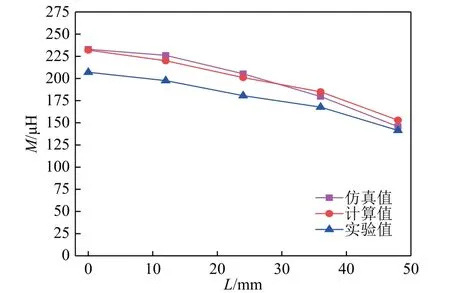
圖18 互感仿真計(jì)算實(shí)驗(yàn)對(duì)比Fig.18 Comparison of mutual inductance under simulations, calculations and experiments
圖19 為實(shí)驗(yàn)與仿真的DC-DC 效率值隨軸向偏移距離變化曲線。圖中仿真值穩(wěn)定在72%左右,實(shí)驗(yàn)值穩(wěn)定在68%左右,受軸向偏移的影響較小。實(shí)驗(yàn)值與仿真值產(chǎn)生偏差的主要原因在于實(shí)驗(yàn)過(guò)程中系統(tǒng)存在其他損耗,導(dǎo)致DC-DC 效率降低。
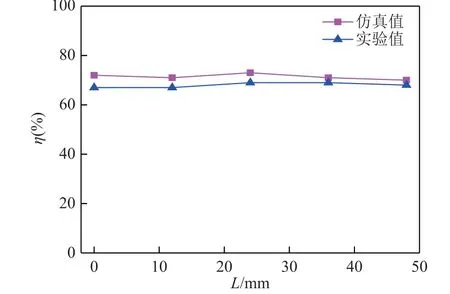
圖19 DC-DC 效率仿真實(shí)驗(yàn)對(duì)比Fig.19 Comparison of DC-DC efficiency under simulations and experiments
圖20 為輸出功率隨軸向偏移距離變化的實(shí)驗(yàn)值與仿真值的變化。由于實(shí)驗(yàn)過(guò)程中存在其他損耗,從而導(dǎo)致實(shí)驗(yàn)值較小。但從圖20 可知,其變化趨勢(shì)是一致的,均隨軸向偏移距離的增大而不斷減小;在軸向偏移48mm 時(shí),較原來(lái)正對(duì)時(shí)的輸出功率減小約30%,即系統(tǒng)的功率傳輸能力隨軸向偏移的不斷增加而不斷減弱,且影響較大。
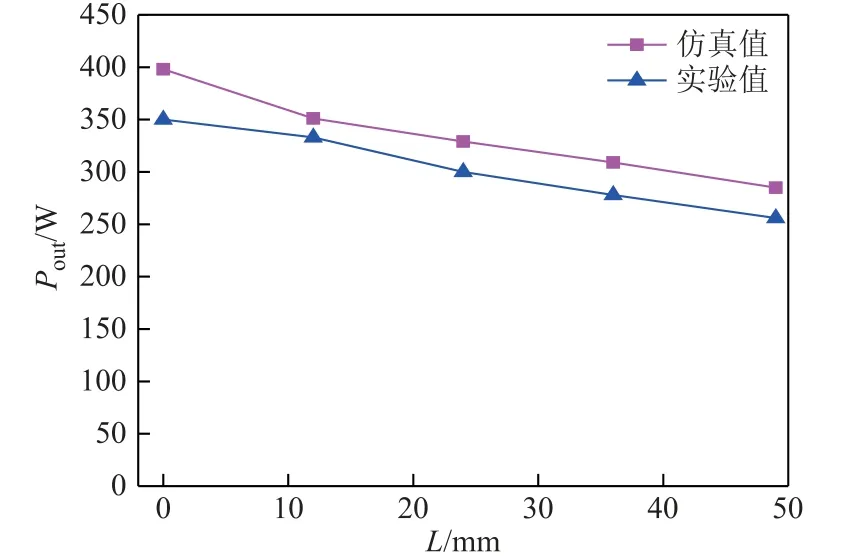
圖20 輸出功率仿真實(shí)驗(yàn)對(duì)比Fig.20 Comparison of output power under simulations and experiments
5 結(jié)論
本文以AUV 水下無(wú)線充電為研究背景,建立了旋轉(zhuǎn)式LCT 互感計(jì)算模型,同時(shí)通過(guò)仿真分析了不同副邊線圈長(zhǎng)度條件下軸向偏移對(duì)旋轉(zhuǎn)式 LCT耦合系數(shù)、輸出功率及效率的影響,并搭建了實(shí)驗(yàn)平臺(tái)進(jìn)行實(shí)驗(yàn)驗(yàn)證,最后得到如下結(jié)論:
1)互感值與副邊線圈長(zhǎng)度呈正相關(guān),同時(shí)軸向偏移越大耦合系數(shù)與互感值越小;副邊線圈長(zhǎng)度越長(zhǎng),耦合系數(shù)受軸向偏移影響越小。
2)軸向偏移越大,輸出功率越小;且副邊線圈長(zhǎng)度越長(zhǎng)旋轉(zhuǎn)LCT 的抗軸向偏移能力越強(qiáng),輸出功率受軸向偏移影響越小。
3)旋轉(zhuǎn)式LCT 的DC-DC 傳輸效率受軸向偏移的影響較小,即DC-DC 傳輸效率的抗軸向偏移能力較強(qiáng)。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52