低短路比電網(wǎng)下含負(fù)序控制雙饋風(fēng)機(jī)穩(wěn)定性研究的幾個(gè)關(guān)鍵問(wèn)題
2021-12-13 07:32:26徐海亮趙仁德胡家兵
電工技術(shù)學(xué)報(bào) 2021年22期
徐海亮 吳 瀚 李 志 趙仁德 胡家兵
(1. 中國(guó)石油大學(xué)(華東)新能源學(xué)院 青島 266580 2. 華中科技大學(xué)電氣與電子工程學(xué)院 武漢 430074)
0 引言
為了應(yīng)對(duì)傳統(tǒng)化石能源危機(jī)和由此帶來(lái)的環(huán)境污染問(wèn)題,開(kāi)發(fā)利用新能源已成為世界各國(guó)的共識(shí)。其中,風(fēng)力發(fā)電經(jīng)過(guò)近二十多年的開(kāi)發(fā)實(shí)踐,已成為公認(rèn)的最具有商業(yè)利用前景的新能源形式之一[1]。根據(jù)全球風(fēng)能理事會(huì)的統(tǒng)計(jì)報(bào)告,2019 年全球風(fēng)電裝機(jī)容量為6 040 萬(wàn)kW,同比增長(zhǎng)19%,全球風(fēng)電累計(jì)裝機(jī)容量超過(guò)6.5 億kW,同比增長(zhǎng)10%[2]。2019 年我國(guó)風(fēng)電新增并網(wǎng)裝機(jī)2 574 萬(wàn)kW(含陸上風(fēng)電新增裝機(jī)2 376 萬(wàn)kW),同比增長(zhǎng)21.7%,全國(guó)風(fēng)電累計(jì)裝機(jī)2.1 億kW(含陸上風(fēng)電累計(jì)裝機(jī)2.04億kW),風(fēng)電裝機(jī)占全部發(fā)電裝機(jī)的10.4%[3]。風(fēng)電穩(wěn)固保持在我國(guó)除水電之外第一大可再生能源的戰(zhàn)略地位。可以預(yù)見(jiàn),今后一個(gè)較長(zhǎng)時(shí)期內(nèi),風(fēng)力發(fā)電仍將保持較快的增長(zhǎng)速度。同時(shí),綜合國(guó)內(nèi)外風(fēng)電技術(shù)和產(chǎn)業(yè)發(fā)展態(tài)勢(shì)看,有以下幾個(gè)基本判斷:
1)雙饋仍將是陸上風(fēng)機(jī)的主流機(jī)型。在各種類型的并網(wǎng)風(fēng)機(jī)裝備中,雙饋型風(fēng)電機(jī)組(主電路拓?fù)淙鐖D1 所示,下文簡(jiǎn)稱“雙饋風(fēng)機(jī)”)由于具有勵(lì)磁變流器容量小、成本低、運(yùn)行效率高等優(yōu)點(diǎn),長(zhǎng)期占據(jù)風(fēng)機(jī)市場(chǎng) 2/3 以上份額[4]。隨著整機(jī)廠商Siemens Gamesa 在2017 年11 月宣布其陸上風(fēng)機(jī)將放棄直驅(qū)技術(shù)而推行雙饋技術(shù),國(guó)際三大風(fēng)機(jī)制造商Vestas、Siemens Gamesa、GE 的陸上風(fēng)機(jī)將全部采用雙饋技術(shù)路線。因此,圍繞雙饋風(fēng)機(jī)的技術(shù)探索,必將繼續(xù)成為未來(lái)一個(gè)時(shí)期風(fēng)電領(lǐng)域的焦點(diǎn)和前沿課題。

圖1 雙饋風(fēng)電機(jī)組主電路拓?fù)銯ig.1 Main circuit topology of DFIG-based wind turbines
2)低短路比已成風(fēng)電機(jī)組接入電網(wǎng)的主要形態(tài)。由于我國(guó)風(fēng)電資源和電力負(fù)荷的逆向分布特性,風(fēng)電機(jī)組大多接入電網(wǎng)末端,低短路比(Short Circuit Ratio, SCR)(通常指SCR<3[5])電網(wǎng)或弱電網(wǎng)(weak grid)已成為風(fēng)電機(jī)組接入電網(wǎng)的主要形態(tài)[6-7]。然而,現(xiàn)有風(fēng)電機(jī)組的控制系統(tǒng)通常基于堅(jiān)強(qiáng)電網(wǎng)(stiff grid)設(shè)計(jì),未充分考慮大規(guī)模集中式開(kāi)發(fā)、遠(yuǎn)距離輸送等風(fēng)電開(kāi)發(fā)模式下長(zhǎng)輸電線路的阻抗因素。研究表明,即便電網(wǎng)電壓對(duì)稱,當(dāng)電網(wǎng)阻抗不可忽略時(shí),雙饋風(fēng)機(jī)與電網(wǎng)阻抗的交互作用也會(huì)引發(fā)系統(tǒng)的小干擾失穩(wěn)問(wèn)題[8-10]。而當(dāng)電網(wǎng)電壓不對(duì)稱時(shí),電網(wǎng)正序、負(fù)序阻抗及其序間耦合分量,將與雙饋風(fēng)機(jī)網(wǎng)側(cè)變流器(Grid-Side Converter, GSC)、轉(zhuǎn)子側(cè)變流器(Rotor-Side Converter, RSC)之間產(chǎn)生更為復(fù)雜的交互作用[11],其帶來(lái)的失穩(wěn)振蕩風(fēng)險(xiǎn)亟需進(jìn)行機(jī)理分析、量化評(píng)估和對(duì)策研究。
3)負(fù)序控制已經(jīng)成為研究難點(diǎn)和關(guān)鍵。由不對(duì)稱電網(wǎng)故障或者非線性的牽引供電系統(tǒng)負(fù)荷[12-13]等引起的不對(duì)稱電網(wǎng)事故頻發(fā)。隨著風(fēng)電機(jī)組并網(wǎng)規(guī)模的增大,德國(guó)等風(fēng)電強(qiáng)國(guó)的并網(wǎng)導(dǎo)則已明確要求并網(wǎng)風(fēng)機(jī)需具備故障穿越和負(fù)序電流控制能力[14],如圖2 所示。2020 年上半年,我國(guó)修訂版《風(fēng)電場(chǎng)接入電力系統(tǒng)技術(shù)規(guī)定第1 部分:陸上風(fēng)電》也已將該負(fù)序控制要求寫(xiě)入國(guó)家標(biāo)準(zhǔn)[15]。然而,為滿足并網(wǎng)導(dǎo)則要求,風(fēng)機(jī)須向電網(wǎng)吸收(注入)規(guī)定比例的負(fù)序(正序)無(wú)功電流,這可能會(huì)進(jìn)一步加劇不對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)電磁轉(zhuǎn)矩的二倍頻波動(dòng)[16],進(jìn)而危及齒輪箱等風(fēng)機(jī)軸系的運(yùn)行安全。因此,如何協(xié)同雙饋風(fēng)機(jī)GSC、RSC 控制,使其既滿足電網(wǎng)導(dǎo)則正、負(fù)序無(wú)功電流要求,又不超出自身應(yīng)力約束,成為一項(xiàng)關(guān)鍵難題。進(jìn)一步地,計(jì)及負(fù)序電流控制后,雙饋風(fēng)機(jī)與不對(duì)稱弱電網(wǎng)之間又會(huì)引入哪些新的失穩(wěn)因子尚未可知,相關(guān)研究仍處于起步階段,需進(jìn)行理論和技術(shù)攻關(guān)。
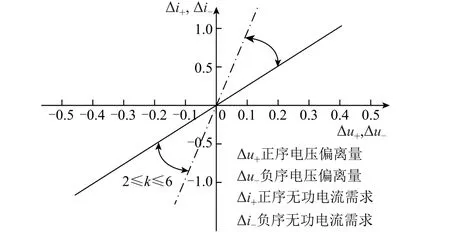
圖2 德國(guó)電網(wǎng)運(yùn)營(yíng)商VDE 公司制定的不對(duì)稱電網(wǎng)下無(wú)功電流響應(yīng)標(biāo)準(zhǔn)Fig.2 Reactive current response standard for asymmetric grid developed by German grid operator VDE
圍繞上述雙饋風(fēng)電技術(shù)的發(fā)展趨勢(shì),下面將深入探討低短路比電網(wǎng)下含負(fù)序控制雙饋風(fēng)機(jī)穩(wěn)定性分析與設(shè)計(jì)的幾個(gè)關(guān)鍵問(wèn)題。
1 問(wèn)題與挑戰(zhàn)
1.1 精確建模難——雙饋風(fēng)機(jī)計(jì)及負(fù)序電流動(dòng)態(tài)下的外特性復(fù)雜,小干擾頻域建模較為困難
不對(duì)稱電網(wǎng)下,含負(fù)序控制的雙饋風(fēng)機(jī)外特性不僅與功率環(huán)、鎖相環(huán)有關(guān),還與電流環(huán),特別是負(fù)序電流控制環(huán)路緊密相關(guān)。研究表明,對(duì)稱電網(wǎng)條件下,雙饋風(fēng)機(jī)系統(tǒng)的狀態(tài)空間模型已達(dá)12 階[8],不對(duì)稱電網(wǎng)條件下計(jì)及負(fù)序電流控制后雙饋風(fēng)機(jī)系統(tǒng)模型或可達(dá)36 階之高(考慮轉(zhuǎn)矩波動(dòng)抑制以及必要的濾波環(huán)節(jié))。特別是,負(fù)序電流可以采用多種控制方式,每種控制方式下電流環(huán)的動(dòng)態(tài)響應(yīng)特性迥異。這進(jìn)一步增加了建模分析的難度。因此,低短路比不對(duì)稱電網(wǎng)下,如何精確刻畫(huà)雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的外特性是小干擾穩(wěn)定性分析的基本挑戰(zhàn)。
1.2 定量分析難——不對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)系統(tǒng)存在正負(fù)序間阻抗耦合,相互作用機(jī)理復(fù)雜,且缺乏有效的量化評(píng)估手段
雙饋風(fēng)機(jī)-不對(duì)稱故障網(wǎng)絡(luò)是典型的多輸入多輸出(Multiple Input Multiple Output, MIMO)系統(tǒng),其包含正序風(fēng)機(jī)、正序網(wǎng)絡(luò)、負(fù)序風(fēng)機(jī)、負(fù)序網(wǎng)絡(luò)及其序間耦合支路,如圖3 所示。這些組成部分與系統(tǒng)整體穩(wěn)定性間的關(guān)系復(fù)雜,傳統(tǒng)針對(duì)單輸入單輸出(Single Input Single Output, SISO)系統(tǒng)的穩(wěn)定性分析方法[7-8]已經(jīng)難以奏效。特別是,正負(fù)序耦合作用機(jī)制不清,量化評(píng)估手段匱乏。
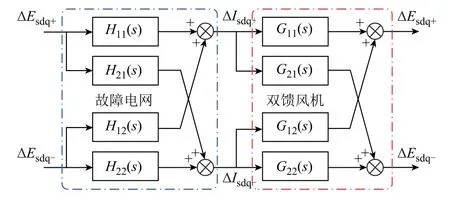
圖3 雙饋風(fēng)機(jī)-故障網(wǎng)絡(luò)序間耦合示意圖Fig.3 Schematic diagram of inter-order coupling of DFIG-based WT and asymmetric network system
1.3 協(xié)同控制難——不對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)GSC、RSC 控制高度耦合,協(xié)同設(shè)計(jì)難度大
對(duì)稱電網(wǎng)條件下,雙饋風(fēng)機(jī)GSC、RSC 控制完全解耦,通過(guò)分別建立二者的頻域阻抗模型即可獲得風(fēng)機(jī)的整體阻抗特性[5,9]。然而,當(dāng)電網(wǎng)不對(duì)稱時(shí),為實(shí)現(xiàn)負(fù)序電流響應(yīng)、轉(zhuǎn)矩波動(dòng)抑制等目標(biāo),雙饋風(fēng)機(jī)GSC、RSC 之間控制高度耦合。此時(shí),GSC、RSC 獨(dú)立建模的方式已經(jīng)難以奏效,需充分考慮兩變流器之間的強(qiáng)耦合特性。因此,如何對(duì)雙饋風(fēng)機(jī)兩變流器實(shí)施協(xié)同控制和穩(wěn)定設(shè)計(jì),構(gòu)成了又一重要挑戰(zhàn)。
2 研究現(xiàn)狀剖析
下面將從弱電網(wǎng)下雙饋風(fēng)機(jī)的穩(wěn)定性、不對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)的負(fù)序電流控制以及常見(jiàn)的并網(wǎng)電力變換系統(tǒng)的穩(wěn)定性分析手段等方面,闡述國(guó)內(nèi)外研究現(xiàn)狀和技術(shù)發(fā)展動(dòng)態(tài)。
2.1 弱電網(wǎng)下雙饋風(fēng)機(jī)的穩(wěn)定性問(wèn)題
近年來(lái),弱電網(wǎng)條件下雙饋風(fēng)電機(jī)組的運(yùn)行穩(wěn)定問(wèn)題受到廣泛關(guān)注,相關(guān)研究可以從以下兩個(gè)維度進(jìn)行歸納和總結(jié):一方面,從研究脈絡(luò)發(fā)展看,從早期聚焦雙饋風(fēng)機(jī)接入串補(bǔ)網(wǎng)絡(luò)引起的次同步振蕩(Sub-Synchronous Oscillation, SSO)問(wèn)題[17-19]向雙饋風(fēng)機(jī)接入一般化低短路比電網(wǎng)下的穩(wěn)定性問(wèn)題[8,20-21]過(guò)渡:另一方面,從研究重點(diǎn)變化看,從早期聚焦雙饋風(fēng)機(jī)失穩(wěn)振蕩的影響因素分析[22-23]向雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)主動(dòng)阻尼控制方法[24]過(guò)渡。
針對(duì)華北地區(qū)風(fēng)電場(chǎng)發(fā)生的次同步振蕩現(xiàn)象,文獻(xiàn)[17]建立等效系統(tǒng)進(jìn)行時(shí)域模擬,通過(guò)仿真重現(xiàn)SSO 現(xiàn)象。研究發(fā)現(xiàn)風(fēng)速、DFIG 數(shù)量及其控制參數(shù)等都會(huì)對(duì)風(fēng)電場(chǎng)的穩(wěn)定性產(chǎn)生影響,可采用建立等效電路模型的方法來(lái)直觀解釋SSO 產(chǎn)生機(jī)理。還有學(xué)者通過(guò)模態(tài)分析等方法[18-19],對(duì)接入串補(bǔ)網(wǎng)絡(luò)引起的SSO 現(xiàn)象進(jìn)行機(jī)理分析。文獻(xiàn)[22]針對(duì)SSO 現(xiàn)象提出相應(yīng)的RSC 控制律來(lái)調(diào)節(jié)產(chǎn)生的有功和無(wú)功功率,無(wú)需輔助次同步阻尼控制器,具有良好的阻尼特性。文獻(xiàn)[24]則提出一種基于魯棒控制器的雙饋風(fēng)機(jī)-串補(bǔ)網(wǎng)絡(luò)的SSO 抑制策略,通過(guò)動(dòng)態(tài)限制阻尼控制器的輸出信號(hào)避免DFIG 變換器飽和,實(shí)現(xiàn)了DFIG 故障穿越運(yùn)行。
為更精確地描述雙饋風(fēng)機(jī)的外特性,文獻(xiàn)[21]建立了詳細(xì)的雙饋風(fēng)機(jī)阻抗模型,并將其代入RLC等效電路中,以此來(lái)分析整個(gè)并網(wǎng)系統(tǒng)的穩(wěn)定性。文獻(xiàn)[25]提出了考慮鎖相環(huán)影響的雙饋風(fēng)機(jī)輸入導(dǎo)納模型,并在此基礎(chǔ)上構(gòu)建回率矩陣,利用廣義奈奎斯特曲線開(kāi)展了穩(wěn)定性分析。
針對(duì)雙饋風(fēng)機(jī)輸出呈現(xiàn)多輸入多輸出特性,文獻(xiàn)[26]在建立的MIMO 阻抗模型基礎(chǔ)上,采用等效的SISO 阻抗模型進(jìn)行簡(jiǎn)化分析[27],取得較好的效果。此外,文獻(xiàn)[28]利用復(fù)矢量建立了DFIG的阻抗模型,如圖 4 所示,其中,GDFIG(s)=1/(σLrs+Rr);Gp2ir(s)、Gp2ig(s)為鎖相環(huán)動(dòng)態(tài)對(duì)轉(zhuǎn)子電流和網(wǎng)側(cè)變換器電流的影響;G1(s) =1/(s+jωs);G1(s) =1/(s+jωs);GPI(s)為PI 控制器的傳遞函數(shù);G2(s)=Lm(s+jωslip)/Ls;GPLL(s)為鎖相環(huán)傳遞函數(shù);Lm和Ls分別為定轉(zhuǎn)子互感和定子電感;Lg為GSC濾波電感。該模型簡(jiǎn)化了分析雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)穩(wěn)定性的復(fù)雜度。

圖4 基于DFIG 的復(fù)矢量阻抗模型Fig.4 Complex vector impedance model based on DFIG
研究發(fā)現(xiàn),鎖相環(huán)會(huì)在基頻附近引入負(fù)阻尼,對(duì)并網(wǎng)系統(tǒng)的穩(wěn)定性產(chǎn)生重要影響。文獻(xiàn)[29]提出了一種混合H2/H∞魯棒阻尼控制器,提高了鎖相環(huán)的動(dòng)態(tài)性能,降低了系統(tǒng)振蕩風(fēng)險(xiǎn)。文獻(xiàn)[30]另辟蹊徑,提出了一種無(wú)鎖相環(huán)的直接功率控制,有效地提升了雙饋風(fēng)機(jī)在基頻附近的相位裕度。
值得注意的是,上述研究均基于電網(wǎng)電壓對(duì)稱的前提進(jìn)行分析,尚未考慮電網(wǎng)電壓不對(duì)稱后系統(tǒng)的穩(wěn)定性問(wèn)題。文獻(xiàn)[31]在αβ 坐標(biāo)系中建立了雙饋風(fēng)機(jī)系統(tǒng)在不對(duì)稱故障期間的復(fù)傳遞函數(shù)模型,分析了相應(yīng)的頻率耦合機(jī)理。文獻(xiàn)[32]建立了考慮不對(duì)稱故障時(shí)正負(fù)序電壓、電流耦合關(guān)系的DFIG 并網(wǎng)系統(tǒng)小信號(hào)狀態(tài)空間模型,模態(tài)分析表明不對(duì)稱故障下,雙饋發(fā)電機(jī)系統(tǒng)的不穩(wěn)定極點(diǎn)主要受鎖相環(huán)的影響。文獻(xiàn)[33]推導(dǎo)了dq 坐標(biāo)系下弱電網(wǎng)故障期間計(jì)及鎖相環(huán)(Phase Locked Loop, PLL)和正負(fù)序電流環(huán)的雙饋風(fēng)機(jī)系統(tǒng)的復(fù)阻抗模型,評(píng)估了PLL 帶寬、電壓不平衡度、轉(zhuǎn)子轉(zhuǎn)速及正負(fù)序電流環(huán)帶寬等因素對(duì)雙饋風(fēng)機(jī)穩(wěn)定性的影響。
上述研究為深入理解弱電網(wǎng)條件下雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的小干擾穩(wěn)定問(wèn)題提供了重要理論基礎(chǔ)。歸納來(lái)看,不對(duì)稱弱電網(wǎng)下計(jì)及雙饋風(fēng)機(jī)-故障網(wǎng)絡(luò)序間耦合機(jī)制的統(tǒng)一建模方法仍是分析該類問(wèn)題的重點(diǎn)。特別是,序間耦合作用對(duì)風(fēng)機(jī)失穩(wěn)機(jī)理的影響規(guī)律亟待深入研究。
2.2 不對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)的負(fù)序電流控制問(wèn)題
不對(duì)稱電網(wǎng)下,雙饋風(fēng)機(jī)變流器的常用負(fù)序電流控制方案有:正反轉(zhuǎn)雙dq 坐標(biāo)系下基于比例積分(Proportion-Integral, PI)的電流控制[10-11]、兩相靜止坐標(biāo)系下基于比例諧振(Proportional-Resonant, PR)的電流控制[24]以及正轉(zhuǎn)dq 坐標(biāo)系下基于比例積分諧振(Proportion-Integral-Resonant, PIR)的電流控制[34]等。各類控制方案的優(yōu)點(diǎn)和不足見(jiàn)表1。此外,一些非線性控制方法,如滑模變結(jié)構(gòu)控制[35]、模型預(yù)測(cè)控制[36]等,也被引入到DFIG 的負(fù)序電流控制中,取得了較好的控制效果。

表1 雙饋風(fēng)機(jī)變流器常用電流控制方案Tab.1 Common current control schemes for DFIG-based wind turbine converters
然而,上述方法通常只考慮RSC,沒(méi)有考慮GSC和RSC 間的協(xié)同控制。采用協(xié)同控制有利于提高雙饋風(fēng)機(jī)的抗干擾能力[37]。文獻(xiàn)[38]提出了一種GSC、RSC 協(xié)同控制的方法,通過(guò)控制RSC 來(lái)消除轉(zhuǎn)矩脈動(dòng),控制GSC 來(lái)減弱定子輸出有功功率的振蕩。針對(duì)電網(wǎng)導(dǎo)則的無(wú)功要求,文獻(xiàn)[39]提出的協(xié)調(diào)控制策略能夠很好地滿足電網(wǎng)導(dǎo)則對(duì)有功、無(wú)功電流的需求,同時(shí)消除電磁轉(zhuǎn)矩波動(dòng),提高不對(duì)稱電網(wǎng)下DFIG 的并網(wǎng)運(yùn)行能力。
需要指出的是,弱電網(wǎng)下負(fù)序電流控制對(duì)風(fēng)機(jī)并網(wǎng)系統(tǒng)的小干擾穩(wěn)定影響機(jī)理亟需深入研究。進(jìn)一步地,計(jì)及雙饋風(fēng)機(jī)與不對(duì)稱弱電網(wǎng)的交互作用后,雙饋風(fēng)機(jī)系統(tǒng)的負(fù)序電流控制方案也需要重新審視和設(shè)計(jì)。
2.3 常用并網(wǎng)電力變換系統(tǒng)的穩(wěn)定性分析方法
適用于并網(wǎng)電力變換系統(tǒng)穩(wěn)定性分析的方法主要包括頻率掃描分析法[40-41]、特征根分析法[8,42]、復(fù)轉(zhuǎn)矩系數(shù)法[43-44]、時(shí)域仿真法[45]、阻抗分析法[18,46]以及幅相運(yùn)動(dòng)分析法[47]等。上述各類方法的優(yōu)缺點(diǎn)見(jiàn)表2。
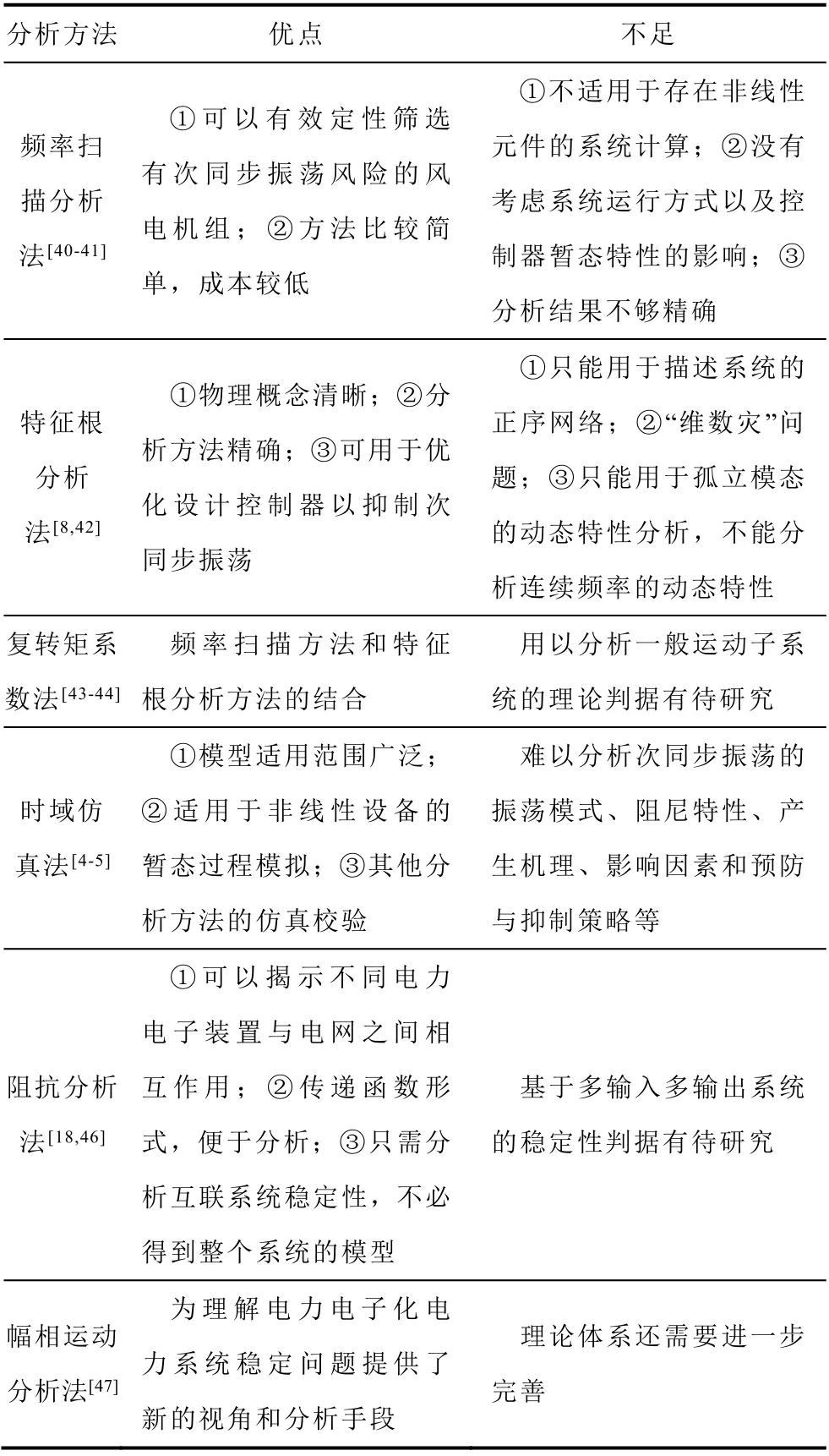
表2 常用并網(wǎng)電力變換系統(tǒng)的穩(wěn)定性分析方法Tab.2 Common stability analysis method of gridconnected power conversion system
比較來(lái)看,特征根分析法和阻抗分析法由于能夠得到解析的物理概念清晰的表達(dá)式,應(yīng)用相對(duì)廣泛。狀態(tài)空間方程分析方法的優(yōu)點(diǎn)是系統(tǒng)模型比較精確,但是如果考慮風(fēng)速的變化、風(fēng)機(jī)的空氣動(dòng)力學(xué)模型、槳距角控制模型以及變流器控制模型,雙饋風(fēng)機(jī)系統(tǒng)模型將達(dá)到22 階[48],給運(yùn)算分析帶來(lái)一定困難。此外,當(dāng)系統(tǒng)穩(wěn)態(tài)運(yùn)行點(diǎn)或系統(tǒng)結(jié)構(gòu)發(fā)生變化時(shí),需要重新建立狀態(tài)方程,重新分析。對(duì)此,可參考圖5 對(duì)雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)從時(shí)間尺度上進(jìn)行劃分,進(jìn)而對(duì)模型進(jìn)行降階處理。
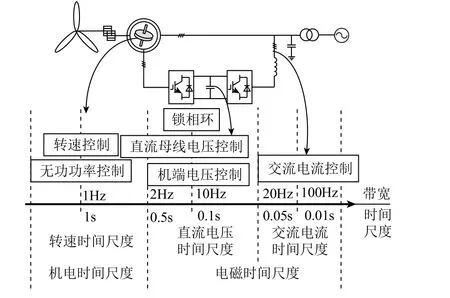
圖5 雙饋風(fēng)機(jī)控制系統(tǒng)時(shí)間尺度劃分Fig.5 Timescale classification of a DFIG-based WT
相對(duì)于特征根分析法,阻抗分析法物理概念清晰、可拓展性強(qiáng),降低了穩(wěn)定性分析的復(fù)雜程度,已成為研究雙饋風(fēng)機(jī)與電網(wǎng)交互穩(wěn)定性的重要手段[19]。文獻(xiàn)[26]借助廣義奈奎斯特判據(jù)對(duì)雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的穩(wěn)定性進(jìn)行分析,并在此基礎(chǔ)上,研究對(duì)比了不同控制器參數(shù)對(duì)系統(tǒng)穩(wěn)定性的影響。
需指出的是,阻抗分析方法通常適用于單輸入單輸出系統(tǒng),基于阻抗的多輸入多輸出系統(tǒng)穩(wěn)定性判據(jù)仍待進(jìn)一步研究。低短路比不對(duì)稱電網(wǎng)下含負(fù)序電流控制的雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的頻域模型呈現(xiàn)為多輸入多輸出形態(tài)。因此,提出適用多輸入多輸出系統(tǒng)的穩(wěn)定性判據(jù),是應(yīng)用阻抗分析法面臨的直接挑戰(zhàn)。
3 研究思路及可行性驗(yàn)證
3.1 不對(duì)稱弱電網(wǎng)下雙饋風(fēng)機(jī)小干擾建模方法
3.1.1 雙饋風(fēng)機(jī)的數(shù)學(xué)模型
雙饋風(fēng)機(jī)定轉(zhuǎn)子繞組間存在強(qiáng)電磁耦合,依靠旋轉(zhuǎn)耦合磁場(chǎng)實(shí)現(xiàn)機(jī)電能量轉(zhuǎn)換,等效電路中含有與發(fā)電機(jī)轉(zhuǎn)差相關(guān)的受控電壓源,是典型的高階強(qiáng)耦合系統(tǒng)。
此外雙饋風(fēng)機(jī)控制系統(tǒng)間存在正、負(fù)序耦合,需進(jìn)一步考慮序間耦合影響。正、負(fù)序電壓分量的耦合示意圖如圖6a 所示。二階陷波器的動(dòng)態(tài)和靜態(tài)特性取決于其品質(zhì)因數(shù)Q的設(shè)置。對(duì)不同品質(zhì)因數(shù)下二階陷波器的響應(yīng)時(shí)間和陷波性能進(jìn)行分析,當(dāng)品質(zhì)因數(shù)在0.46~0.85 之間時(shí),陷波器具有較好的動(dòng)態(tài)性能,能夠快速分離出電壓和電流中的正、負(fù)序分量。因此,可以認(rèn)為正、負(fù)序完全解耦,圖6b中A 點(diǎn)和B 點(diǎn)的波形為零,建模時(shí)可以忽略虛線分支,從而將雙饋發(fā)電機(jī)系統(tǒng)轉(zhuǎn)換為正、負(fù)序分量解耦的兩個(gè)子系統(tǒng),如圖7 所示。

圖6 正負(fù)序電壓耦合分量解耦示意圖Fig.6 The decoupling principle of coupling positive and negative sequence voltage components
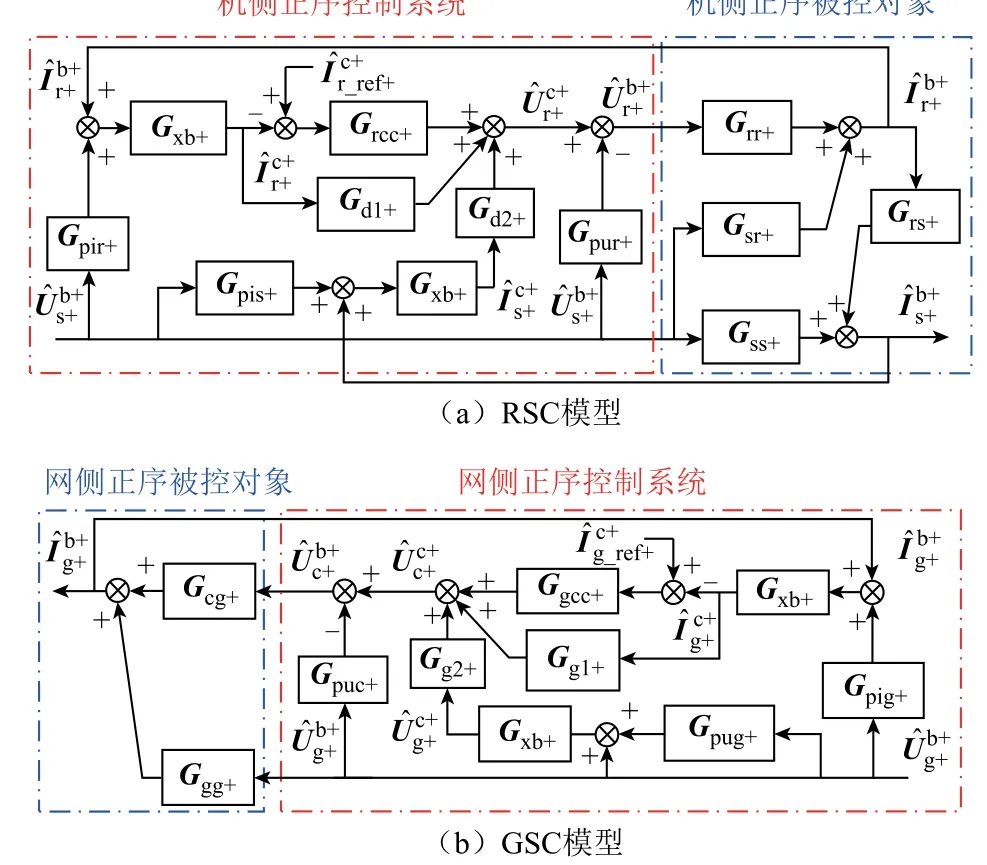
圖7 雙饋風(fēng)機(jī)RSC 和GSC 正序模型Fig.7 RSC and GSC positive sequence models of DFIGbased wind turbine
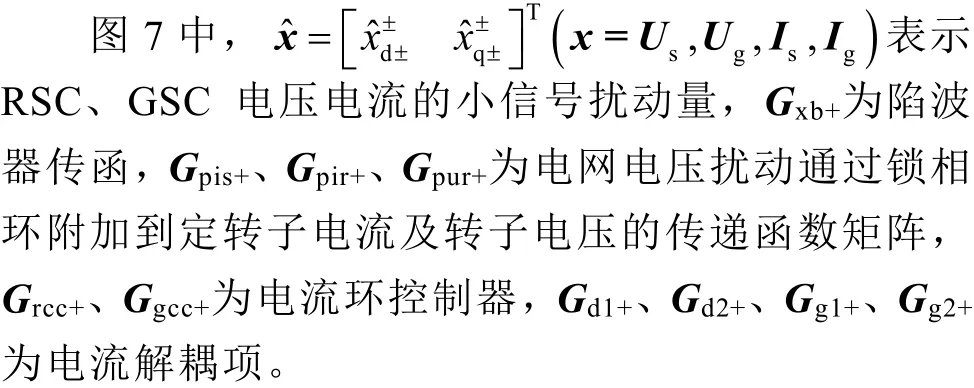
依據(jù)上述分析,可建立包括RSC 電流控制器和PLL 在內(nèi)的DFIG 正、負(fù)序小信號(hào)動(dòng)態(tài)特性為
式中,E為單位矩陣。
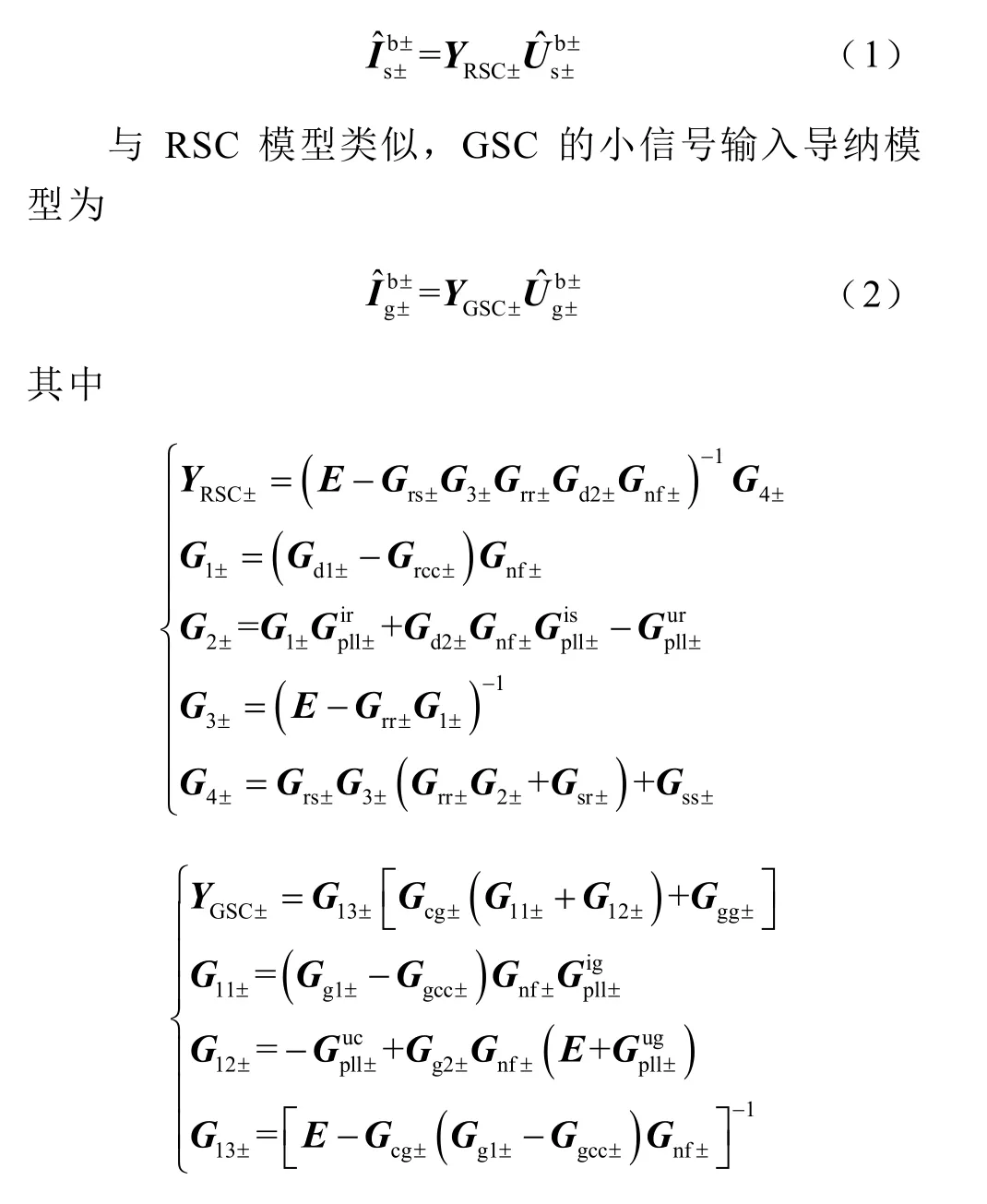
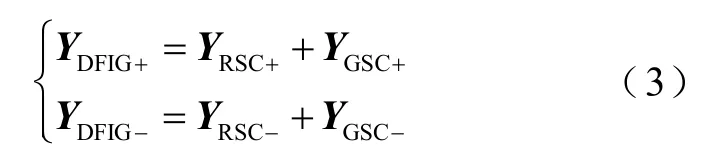
根據(jù)文獻(xiàn)[48],直流鏈電壓具有相對(duì)緩慢的時(shí)間尺度,因此在DFIG 小信號(hào)動(dòng)態(tài)分析中可以被視為一個(gè)常數(shù)。因此,基于式(1)和式(2),整個(gè)雙饋系統(tǒng)的正序和負(fù)序輸入導(dǎo)納為
3.1.2 不對(duì)稱故障網(wǎng)絡(luò)的數(shù)學(xué)模型
不對(duì)稱電網(wǎng)工況下,計(jì)及電流動(dòng)態(tài)的正序、負(fù)序網(wǎng)絡(luò)之間存在耦合,如圖8 所示。由于對(duì)稱分量法基于穩(wěn)態(tài)相量概念,因此該類耦合序網(wǎng)等效電路僅能分析基波分量,不可用來(lái)分析網(wǎng)絡(luò)的動(dòng)態(tài)特性。為準(zhǔn)確刻畫(huà)不對(duì)稱故障網(wǎng)絡(luò)的動(dòng)態(tài),必須對(duì)故障網(wǎng)絡(luò)進(jìn)行計(jì)及電流動(dòng)態(tài)的建模。與雙饋風(fēng)機(jī)建模類似,可建立計(jì)及電流動(dòng)態(tài)時(shí)不對(duì)稱網(wǎng)絡(luò)阻抗模型。
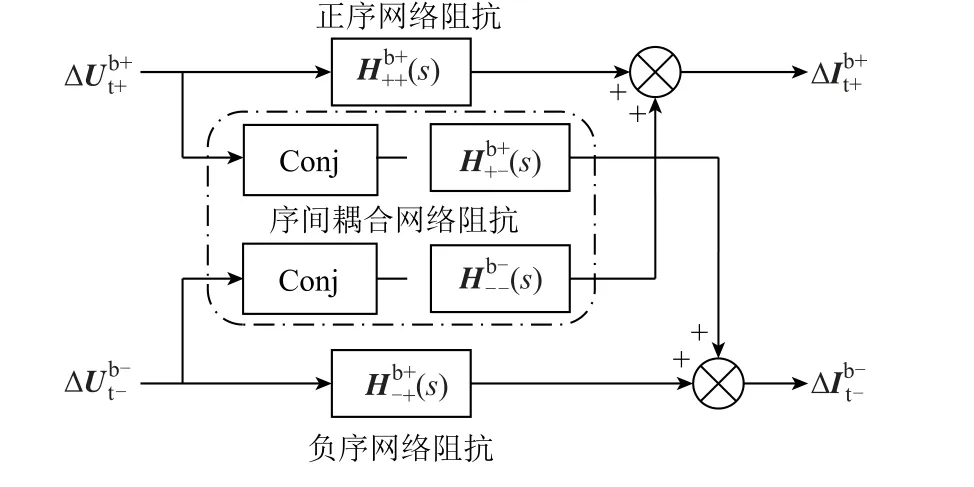
圖8 不對(duì)稱網(wǎng)絡(luò)外端口輸入輸出特性小干擾頻域模型Fig.8 A small interference frequency domain model for asymmetric networks


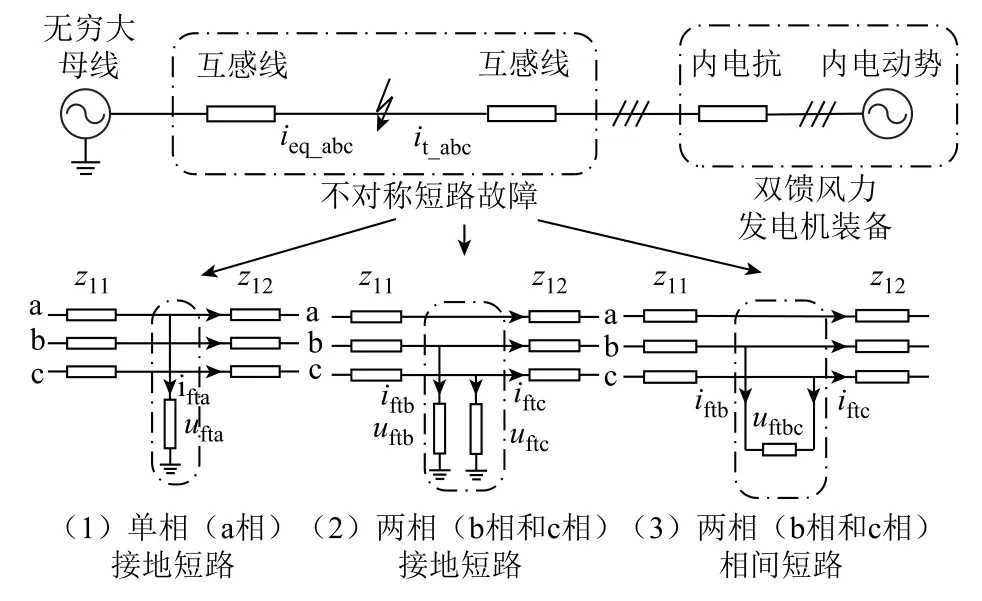
圖9 電力系統(tǒng)常見(jiàn)不對(duì)稱短路故障類型Fig.9 Common types of asymmetric short circuit faults
依據(jù)共軛復(fù)頻率響應(yīng)原理,可以得到從風(fēng)機(jī)端看不對(duì)稱故障網(wǎng)絡(luò)的外端口特性為
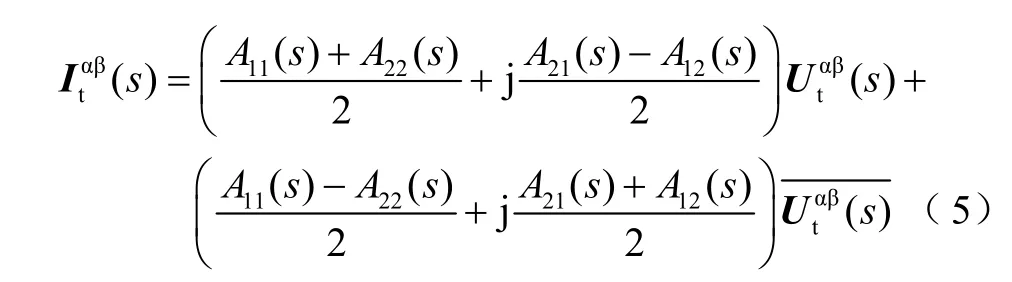
將正、負(fù)序端電壓代入式(5)可分別獲得其單獨(dú)激勵(lì)時(shí)的電流響應(yīng),利用復(fù)傳遞函數(shù)在各旋轉(zhuǎn)坐標(biāo)系間的變換規(guī)律,可得dq 坐標(biāo)系下故障網(wǎng)絡(luò)的正、負(fù)序電流響應(yīng)為
式(6)、式(7)以序量形式刻畫(huà)了從PCC 處風(fēng)機(jī)端看不對(duì)稱故障電網(wǎng)時(shí)的外特性,如圖8 所示。相比電力系統(tǒng)常用于分析不對(duì)稱故障的對(duì)稱分量法,該模型考慮了網(wǎng)絡(luò)的電流動(dòng)態(tài)。
3.1.3 雙饋風(fēng)機(jī)系統(tǒng)阻抗模型驗(yàn)證
為了驗(yàn)證所建立的雙饋風(fēng)機(jī)系統(tǒng)阻抗模型的正確性,圖10 給出了式(3)所表示的雙饋風(fēng)機(jī)頻域響應(yīng)特性,以及通過(guò)時(shí)域仿真模型頻率掃描獲得的結(jié)果。如圖10 所示,兩種方法呈現(xiàn)的頻域特性吻合較好,證明了所建立模型的正確性。
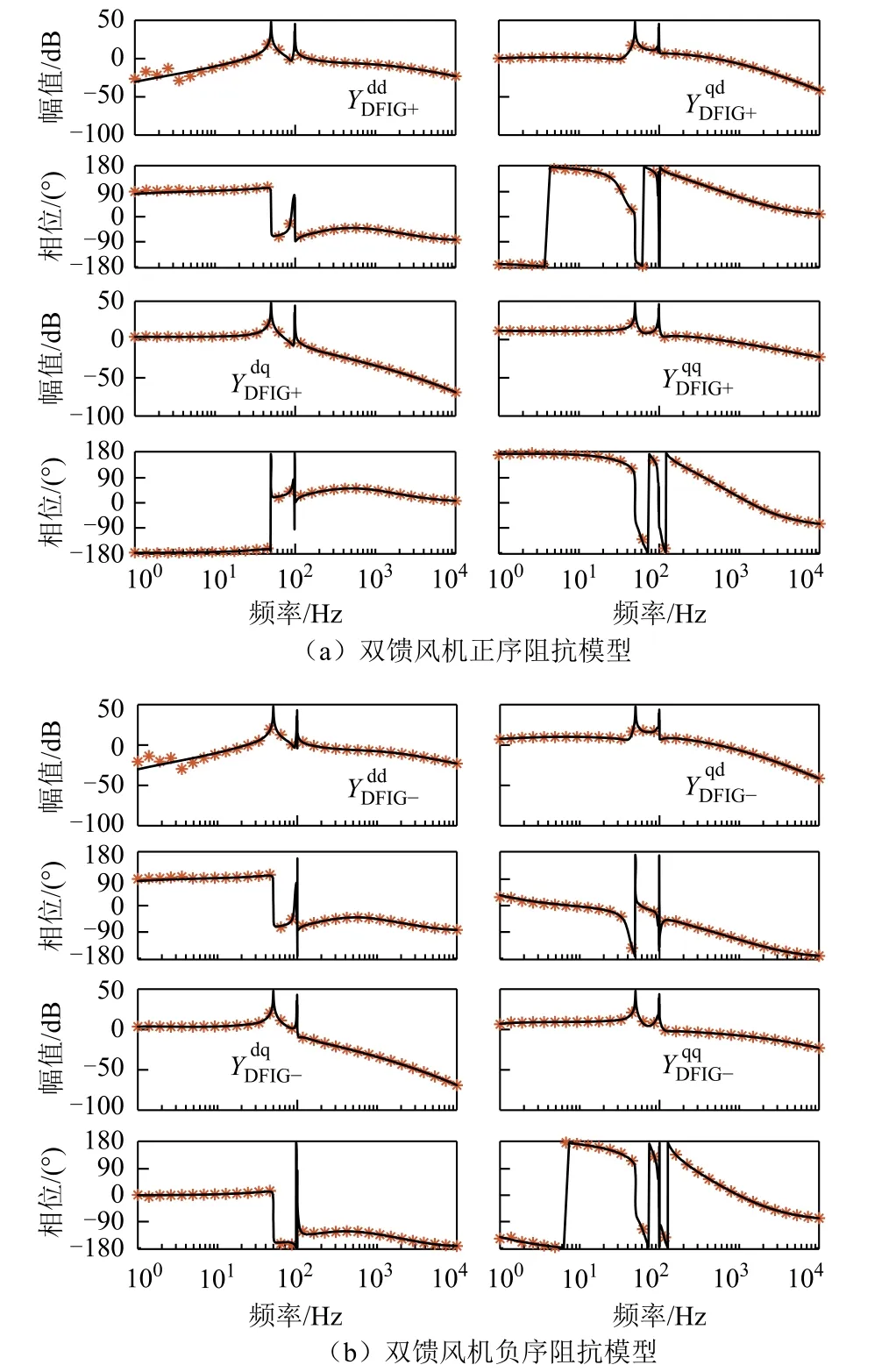
圖10 不對(duì)稱電網(wǎng)故障下雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)模型驗(yàn)證Fig.10 Model validation of DFIG-based WT during asymmetrical grid faults
3.2 不對(duì)稱弱電網(wǎng)下雙饋風(fēng)機(jī)穩(wěn)定性分析
本節(jié)根據(jù)建立的雙饋風(fēng)機(jī)阻抗模型,采用廣義奈奎斯特穩(wěn)定判據(jù)[25],分析弱電網(wǎng)不對(duì)稱故障期間短路比、電流環(huán)控制系數(shù)、鎖相環(huán)控制系數(shù)等關(guān)鍵物理、控制參數(shù)對(duì)系統(tǒng)動(dòng)態(tài)穩(wěn)定性的影響規(guī)律。
3.2.1 物理參數(shù)對(duì)系統(tǒng)穩(wěn)定性的影響
圖11 為不同SCR 下雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)廣義奈奎斯特曲線。如圖11 所示,當(dāng)SCR=4 時(shí),正序和負(fù)序子系統(tǒng)的奈奎斯特曲線均未包圍(-1,j0),因此DFIG 系統(tǒng)是穩(wěn)定的;然而,當(dāng)SCR<3 時(shí),雖然負(fù)序子系統(tǒng)是穩(wěn)定的,但正序子系統(tǒng)的奈奎斯特曲線包圍(-1,j0),因此,DFIG 系統(tǒng)將會(huì)失穩(wěn)。圖12 給出了不對(duì)稱電網(wǎng)故障條件下SCR 為4 和2.7 時(shí)DFIG 系統(tǒng)的實(shí)驗(yàn)結(jié)果。如圖12 所示,當(dāng)SCR=4 時(shí)定子電壓和電流波形是穩(wěn)定的,而在SCR=2.7 時(shí)系統(tǒng)發(fā)生失穩(wěn)振蕩。
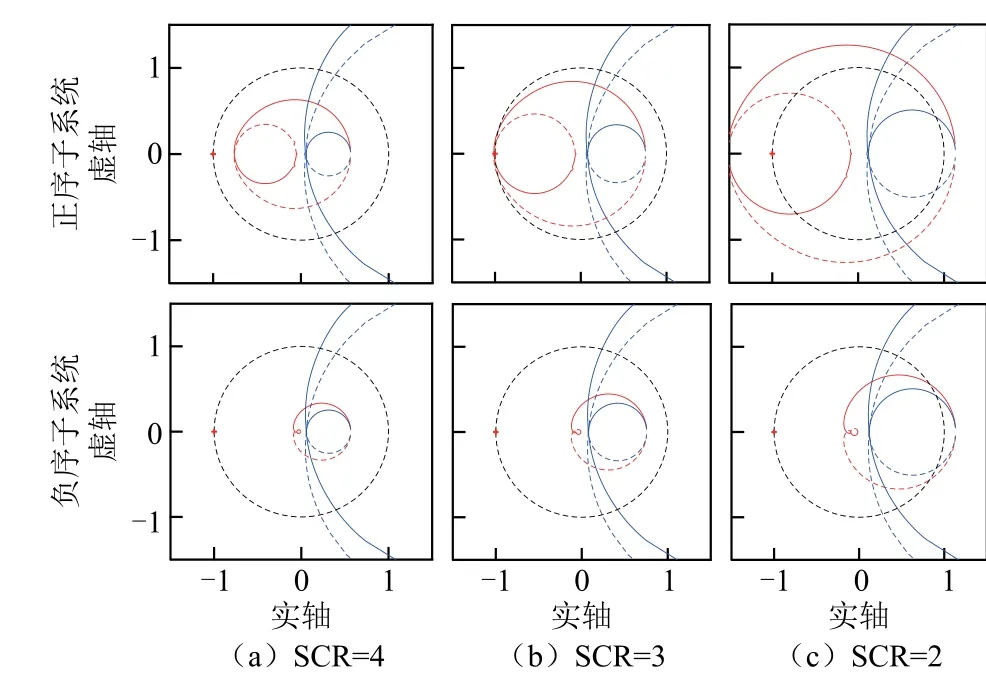
圖11 不同SCR 下雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)廣義奈奎斯特曲線Fig.11 Generalized Nyquist curves with different SCR of grid-connected system of DFIG-based WT
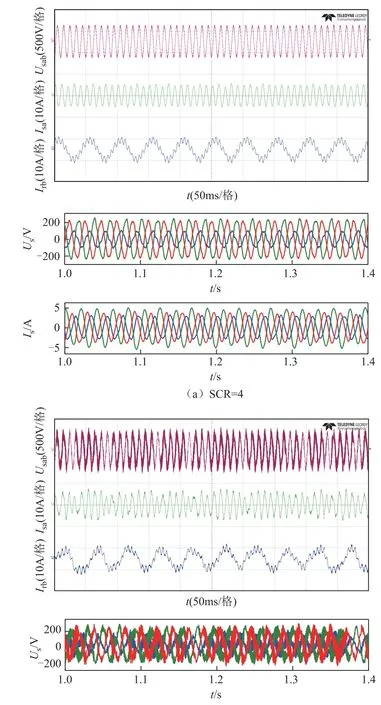
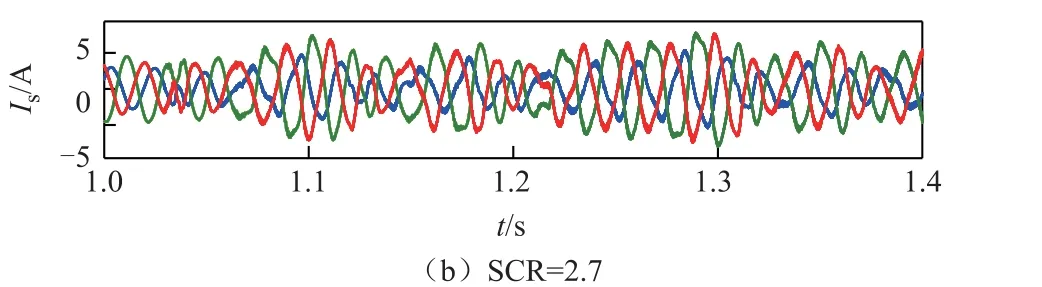
圖12 不同SCR 下雙饋風(fēng)機(jī)實(shí)驗(yàn)結(jié)果Fig.12 Experimental results with different SCR
3.2.2 控制參數(shù)對(duì)系統(tǒng)穩(wěn)定性的影響
1)轉(zhuǎn)子電流環(huán)比例系數(shù)的影響
圖 13 給出了具有不同轉(zhuǎn)子電流環(huán)比例系數(shù)kp_rcc時(shí)的DFIG 系統(tǒng)的廣義奈奎斯特曲線。如圖13所示,當(dāng)kp_rcc超過(guò)8 時(shí),正序子系統(tǒng)的特征值軌跡將包圍點(diǎn)(-1,j0),導(dǎo)致DFIG 系統(tǒng)不穩(wěn)定。而轉(zhuǎn)子電流環(huán)比例系數(shù)對(duì)負(fù)序子系統(tǒng)的穩(wěn)定性影響有限。圖14 所示為不對(duì)稱弱電網(wǎng)下轉(zhuǎn)子電流環(huán)比例系數(shù)變化時(shí)的實(shí)驗(yàn)結(jié)果。如圖14 所示,當(dāng)比例系數(shù)kp_rcc變大后,定子電壓和電流波形開(kāi)始振蕩,意味著DFIG 系統(tǒng)趨于失穩(wěn)。

圖13 不同電流環(huán)比例系數(shù)下的廣義Nyquist 曲線Fig.13 Generalized Nyquist curves with different proportional coefficients of rotor current loop
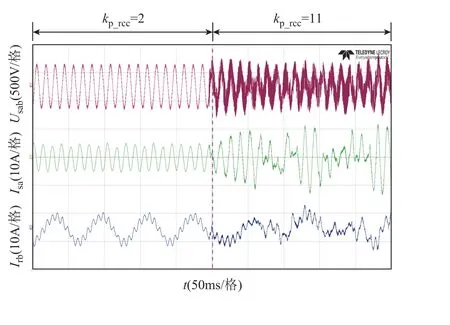
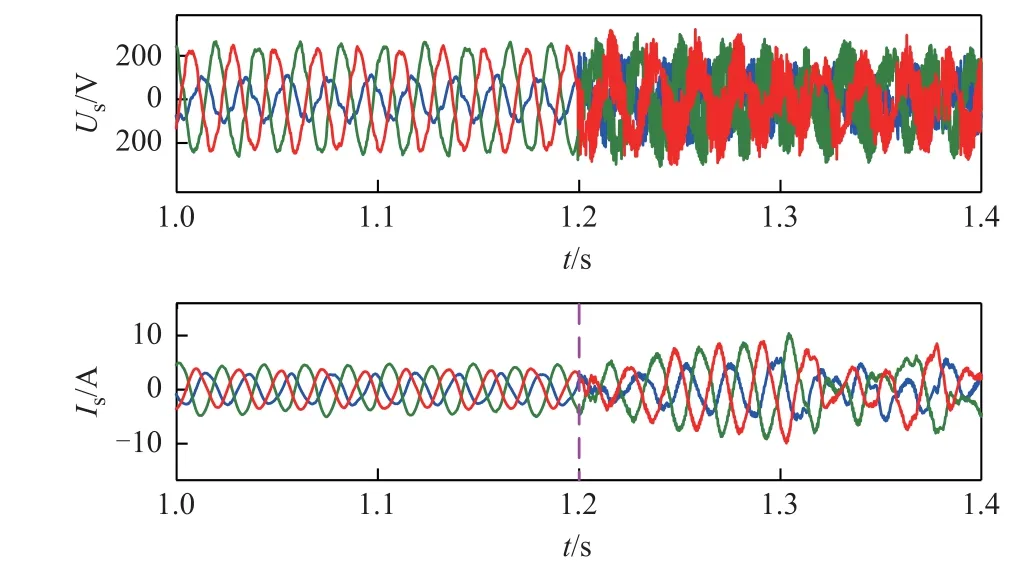
圖14 電流環(huán)比例系數(shù)變化實(shí)驗(yàn)結(jié)果Fig.14 Experimental results with different proportional coefficients of rotor current loop
2)鎖相環(huán)比例系數(shù)的影響
圖15 為不同鎖相環(huán)比例系數(shù)下的DFIG 系統(tǒng)的廣義奈奎斯特曲線。如圖15 所示,較大的鎖相環(huán)比例系數(shù)使正序子系統(tǒng)的奈奎斯特曲線逐漸包圍(-1,j0)點(diǎn),即DFIG 系統(tǒng)由穩(wěn)態(tài)逐漸過(guò)渡到非穩(wěn)態(tài)。圖16 給出了相應(yīng)的實(shí)驗(yàn)結(jié)果。從圖16 可知,從3 到10 增加鎖相環(huán)比例系數(shù)時(shí)會(huì)引發(fā)DFIG 系統(tǒng)失穩(wěn)振蕩,這與圖15 中的分析結(jié)論基本吻合。
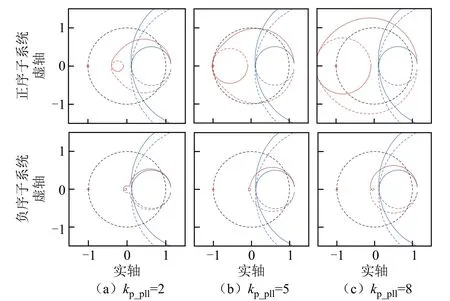
圖15 不同鎖相環(huán)比例系數(shù)下的廣義Nyquist 曲線Fig.15 Generalized Nyquist curves with different proportional coefficients of PLL
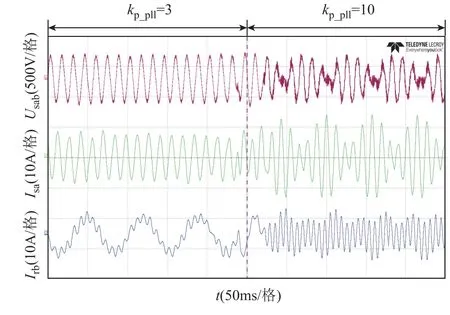

圖16 PLL 比例系數(shù)變化實(shí)驗(yàn)結(jié)果Fig.16 Experimental results with different proportional coefficients of PLL
3.3 不對(duì)稱弱電網(wǎng)下雙饋風(fēng)機(jī)阻抗重塑策略
3.3.1 阻抗重塑的基本原理
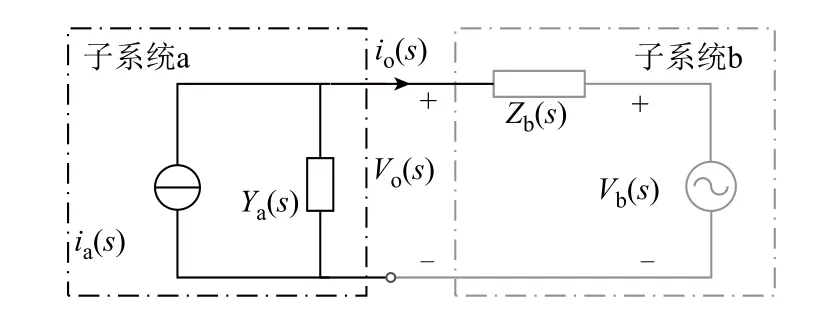
圖17 關(guān)聯(lián)子系統(tǒng)結(jié)構(gòu)Fig.17 Structure diagram of two interconnected subsystems
針對(duì)雙饋風(fēng)機(jī)與弱電網(wǎng)構(gòu)成的互聯(lián)系統(tǒng)可能存在的阻抗“交疊”問(wèn)題,可從以下維度進(jìn)行阻抗塑形:①優(yōu)化控制參數(shù)(對(duì)應(yīng)圖18 中施加位置I),如對(duì)系統(tǒng)外特性影響較大的控制參數(shù)進(jìn)行優(yōu)化;②增加輔助控制環(huán)路[49](對(duì)應(yīng)圖18 中施加位置II),如可為特定頻段的振蕩模態(tài)增加正向阻尼環(huán)路;③采用新型控制策略(對(duì)應(yīng)圖18 中施加位置III),如采用預(yù)測(cè)電流控制[50]等,以徹底解決電流控制器引入的欠阻尼問(wèn)題。需指出的是,根據(jù)前期研究,系統(tǒng)主振頻(主導(dǎo)模態(tài))或可非常接近基頻,如45Hz、57Hz等,此時(shí)如直接采用圖18a 所示塑形方式[51]可能導(dǎo)致基波頻段信息的傳遞能力被嚴(yán)重削弱,而采用圖18b 的“窄頻”塑形手段則有望消除這一不利影響。
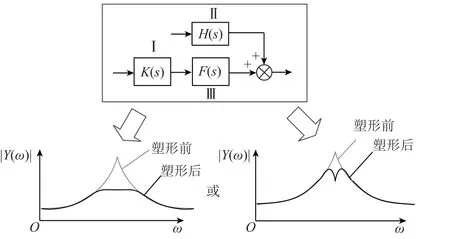
圖18 阻抗重塑方法示意圖Fig.18 Schematic diagram of impedance reconstruction method
3.3.2 阻抗重塑方法及驗(yàn)證
圖19 給出了基于增加輔助控制環(huán)路的阻抗重塑控制策略,該策略利用二階廣義積分器(Second-Order General Integrator, SOGI)環(huán)節(jié)提取并網(wǎng)電流基波分量,形成并網(wǎng)電流負(fù)反饋控制,進(jìn)而對(duì)并網(wǎng)電流進(jìn)行校正,最終抑制并消除并網(wǎng)電流中的振蕩[52]。
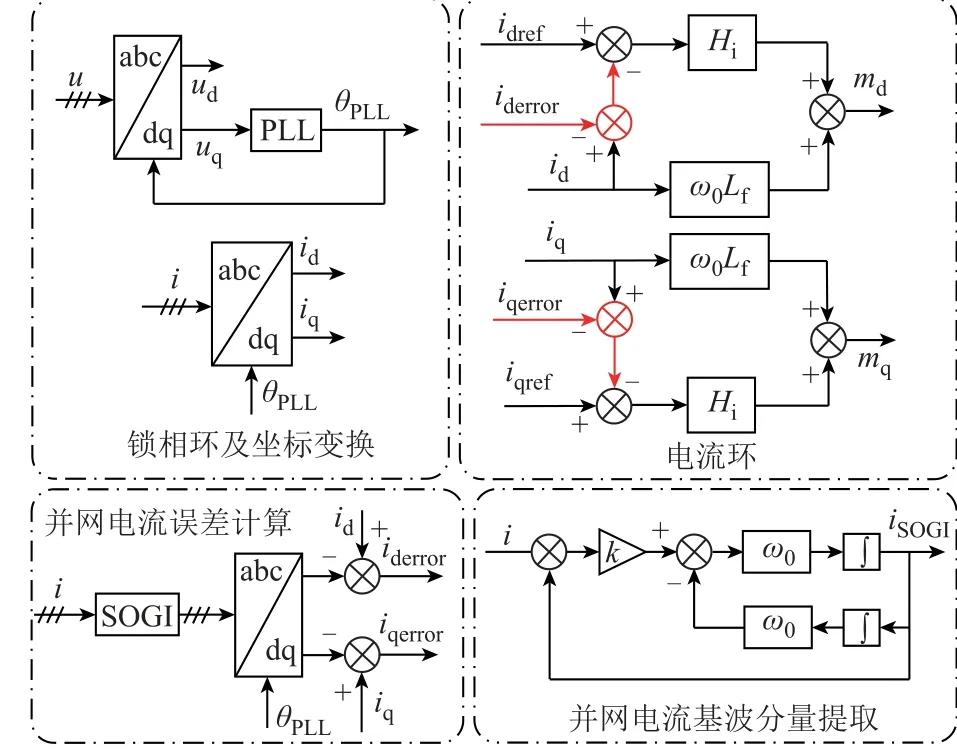
圖19 阻抗重塑控制策略控制結(jié)構(gòu)Fig.19 Impedance remodeling control strategy control structure
圖20、圖21 將降低控制帶寬和引入阻抗重塑控制策略相對(duì)比。圖22 給出了采用不同控制策略時(shí)快速傅里葉變換(Fast Fourier Transform, FFF)分析結(jié)果。由圖20~圖22 可知,降低控制環(huán)節(jié)帶寬雖能在一定程度上抑制并網(wǎng)電流振蕩,但系統(tǒng)動(dòng)態(tài)響應(yīng)過(guò)程也會(huì)受到一定程度的影響。相比之下,阻抗重塑控制策略在不改變控制環(huán)節(jié)帶寬的情況下仍有較強(qiáng)的抑制效果,如圖22 所示,并網(wǎng)電流中振蕩成分得到有效抑制,THD 從33.36%降低至4.16%,顯著改善了系統(tǒng)穩(wěn)定性。
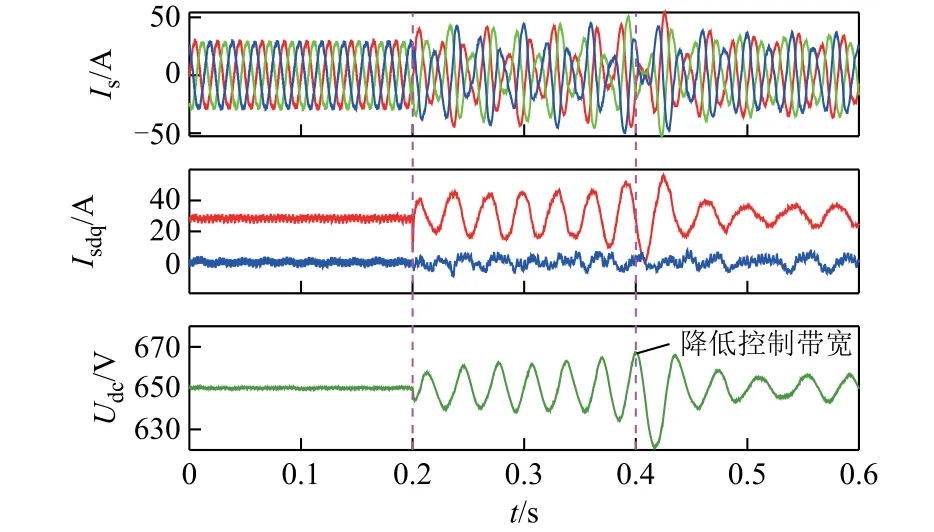
圖20 降低控制帶寬仿真波形Fig.20 Simulation waveforms with reducing control loop bandwidth

圖21 引入阻抗重塑控制策略仿真波形Fig.21 Simulation waveforms with impedance remodeling control strategy
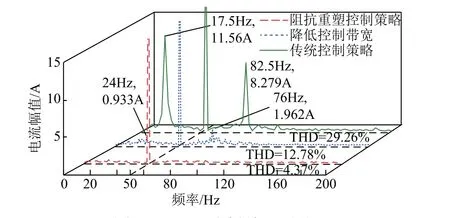
圖22 FFT 分析結(jié)果對(duì)比Fig.22 Comparison of FFT analysis results
3.4 雙饋風(fēng)機(jī)GSC、RSC 協(xié)同控制
3.4.1 協(xié)同控制目標(biāo)
不對(duì)稱弱電網(wǎng)下雙饋風(fēng)機(jī)GSC、RSC 協(xié)同控制應(yīng)達(dá)到以下控制目標(biāo):①滿足電網(wǎng)導(dǎo)則對(duì)雙饋風(fēng)機(jī)正、負(fù)序無(wú)功電流的要求;②實(shí)現(xiàn)電磁轉(zhuǎn)矩二倍頻波動(dòng)抑制;③最大限度地保證有功出力,以支持電網(wǎng)頻率穩(wěn)定。其中,電網(wǎng)導(dǎo)則要求,當(dāng)PCC 基波電壓正序分量在額定電壓的47%~80%時(shí),風(fēng)電場(chǎng)應(yīng)具備向電網(wǎng)注入正序、負(fù)序無(wú)功電流的能力,具體為[37]
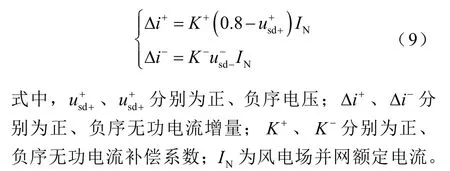
同時(shí),還應(yīng)考量RSC 和GSC 的容量約束、調(diào)制約束等限制條件。需注意的是,不對(duì)稱電網(wǎng)下,RSC、GSC 各有四個(gè)可控電流分量,即正、負(fù)序有功、無(wú)功電流。其協(xié)同控制的電流耦合約束關(guān)系如圖23 所示。

圖23 協(xié)同控制的電流耦合約束條件Fig.23 Current coupling constraints for coordinated control
3.4.2 RSC、GSC 的電流協(xié)同機(jī)制
聚焦上述協(xié)同控制目標(biāo),RSC、GSC 電流協(xié)同機(jī)制設(shè)計(jì)為:RSC 優(yōu)先控制雙饋風(fēng)機(jī)定子側(cè)輸出電網(wǎng)導(dǎo)則要求的正序無(wú)功電流,同時(shí)抑制電磁轉(zhuǎn)矩二倍頻波動(dòng);GSC 優(yōu)先輸出電網(wǎng)導(dǎo)則要求的負(fù)序無(wú)功電流;在RSC、GSC 容量仍有盈余情況下,應(yīng)盡最大限度地協(xié)同輸出正序有功電流以支撐電網(wǎng)頻率穩(wěn)定。據(jù)此可得RSC 和GSC 的正、負(fù)序有功電流和無(wú)功電流指令。
3.4.3 仿真與實(shí)驗(yàn)驗(yàn)證
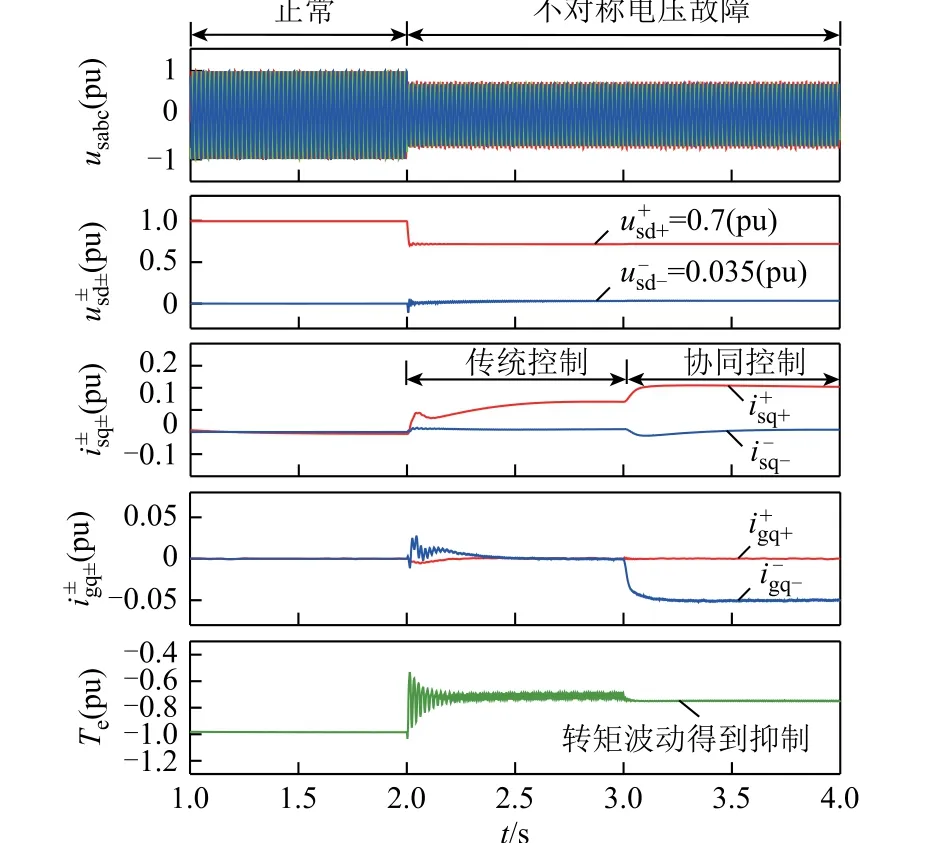
圖24 電網(wǎng)電壓不平衡度δ=5%時(shí)雙饋風(fēng)機(jī)協(xié)同控制策略仿真結(jié)果Fig.24 Simulation results of coordinated control strategy of DFIG-based wind turbine when δ =5%

圖25 δ=15%時(shí)雙饋風(fēng)機(jī)協(xié)同控制策略仿真結(jié)果Fig.25 Simulation results of coordinated control strategy of DFIG-based wind turbine when δ =15%
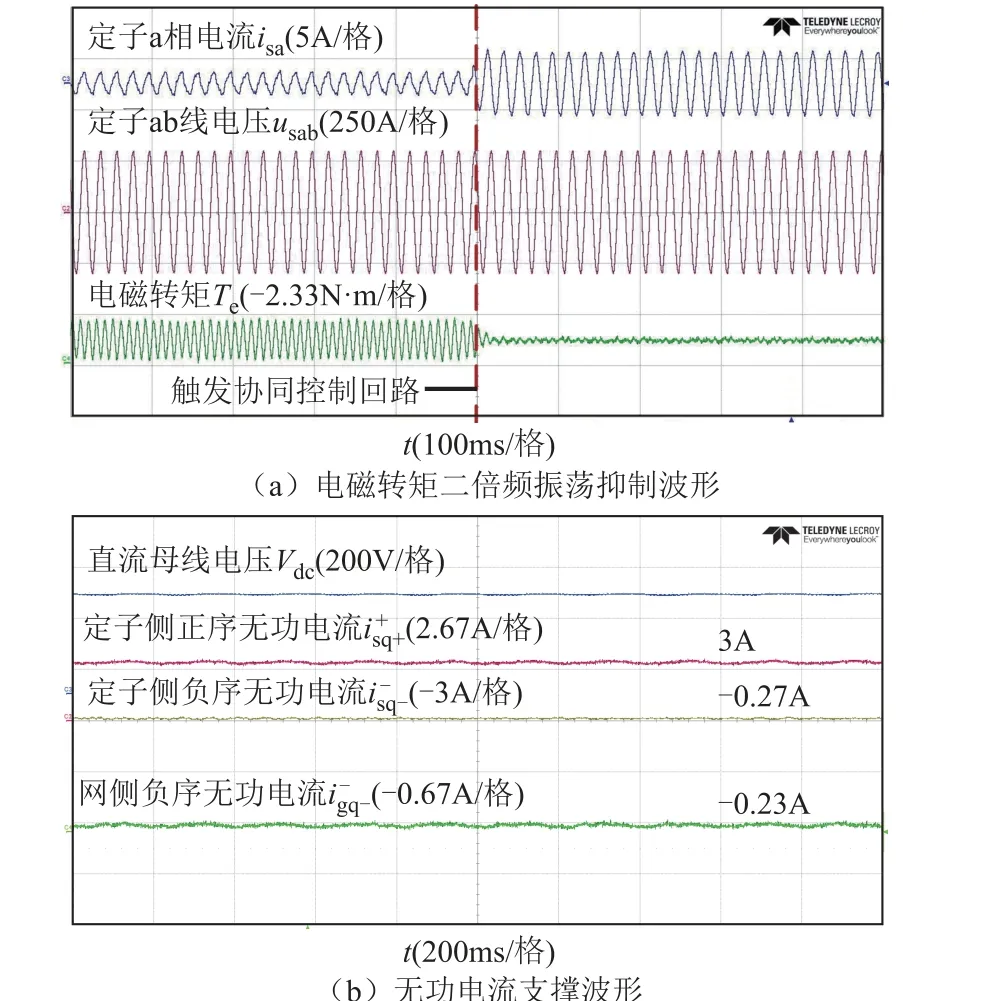
圖26 雙饋風(fēng)機(jī)協(xié)同控制策略實(shí)驗(yàn)結(jié)果Fig.26 Experimental results of coordinated control strategy of DFIG-based wind turbine
4 討論與展望
目前國(guó)內(nèi)外關(guān)于低短路比對(duì)稱電網(wǎng)下雙饋風(fēng)機(jī)與電網(wǎng)交互穩(wěn)定性分析與控制技術(shù)已經(jīng)有了較為豐富的研究成果。不對(duì)稱電網(wǎng)環(huán)境下的交互穩(wěn)定機(jī)理及控制對(duì)策也已經(jīng)引起廣泛關(guān)注,但尚缺乏系統(tǒng)的解決方案。該技術(shù)領(lǐng)域需要重點(diǎn)關(guān)注的問(wèn)題有如下幾點(diǎn):
1)從并網(wǎng)導(dǎo)則看,雙饋風(fēng)機(jī)應(yīng)響應(yīng)電網(wǎng)對(duì)正、負(fù)序無(wú)功電流的要求;從雙饋風(fēng)機(jī)看,無(wú)功電流的響應(yīng)會(huì)影響自身的穩(wěn)定運(yùn)行。因此,如何對(duì)負(fù)序電流進(jìn)行約束,協(xié)調(diào)控制GSC、RSC,使其在維持自身運(yùn)行安全的前提下,滿足并網(wǎng)導(dǎo)則的要求,值得深入研究。
2)由于我國(guó)風(fēng)電資源和電力負(fù)荷的逆向分布特性,風(fēng)電機(jī)組大多接入弱電網(wǎng),雙饋風(fēng)機(jī)與電網(wǎng)阻抗的交互作用會(huì)引發(fā)系統(tǒng)的小干擾失穩(wěn)問(wèn)題。為此,應(yīng)分析失穩(wěn)機(jī)理,量化失穩(wěn)因素對(duì)系統(tǒng)的影響,以期提高雙饋風(fēng)機(jī)與弱電網(wǎng)的交互穩(wěn)定。
3)雙饋風(fēng)機(jī)控制方法多樣,致使其建模方法和模型有所不同,也就表現(xiàn)出不同的阻抗特性。為此,對(duì)不同控制方法進(jìn)行精確建模,分析其接入電網(wǎng)的性能,從而找到適應(yīng)電網(wǎng)能力強(qiáng)的控制方法,提高并網(wǎng)可靠性。
4)面對(duì)復(fù)雜電網(wǎng)環(huán)境,為實(shí)現(xiàn)對(duì)雙饋風(fēng)機(jī)的良好控制,需要獲取精確的相位和頻率信息。改進(jìn)鎖相環(huán)結(jié)構(gòu),提高鎖相環(huán)跟蹤電網(wǎng)電壓的能力,對(duì)并網(wǎng)系統(tǒng)穩(wěn)定性具有重要影響。
5 結(jié)論
本文從風(fēng)力發(fā)電技術(shù)的發(fā)展趨勢(shì)出發(fā),探究了低短路比電網(wǎng)下含負(fù)序控制雙饋風(fēng)機(jī)穩(wěn)定性分析的基本挑戰(zhàn)。通過(guò)對(duì)國(guó)內(nèi)外相關(guān)研究現(xiàn)狀和技術(shù)發(fā)展動(dòng)態(tài)的剖析,歸納比較了現(xiàn)有的技術(shù)解決方案。針對(duì)所提出的建模、分析、控制等方面存在的突出矛盾和問(wèn)題,提出了具體可行的研究思路,并驗(yàn)證了相應(yīng)的可行性方案。主要有以下結(jié)論:
1)不對(duì)稱故障期間,風(fēng)機(jī)和電網(wǎng)自身及其之間均存在正、負(fù)序阻抗耦合。因此,需完整刻畫(huà)風(fēng)機(jī)耦合控制特性和故障網(wǎng)絡(luò)動(dòng)態(tài)特性,以精確建立雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的小干擾頻域模型。
2)立足于所建立的模型,借助廣義奈奎斯特判據(jù)評(píng)估系統(tǒng)穩(wěn)定性,以探明影響雙饋風(fēng)機(jī)裝備穩(wěn)定性的關(guān)鍵制約因素。
3)為實(shí)現(xiàn)負(fù)序電流響應(yīng)、轉(zhuǎn)矩波動(dòng)抑制的雙重目標(biāo),需充分考慮機(jī)側(cè)、網(wǎng)側(cè)兩變流器之間的強(qiáng)耦合特性,通過(guò)協(xié)同負(fù)序控制及一體化阻抗重塑策略,以增強(qiáng)不對(duì)稱弱電網(wǎng)工況下雙饋風(fēng)機(jī)并網(wǎng)系統(tǒng)的穩(wěn)定性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19