雷達技術在感應開關中的應用
2021-12-15 05:13:26李國梟劉會澤胡文濤
日用電器 2021年11期
關鍵詞:檢測
李國梟 劉會澤 胡文濤
(寧波公牛電器有限公司 慈溪 315314)
引言
從20世紀初,雷達概念基本形成后的一百年內,相關技術迅速發展。早期只限于軍用航空航海,時至今日已經在智能設備、自動駕駛汽車等領域大規模民用。頻段方案也發展出:超視距雷達、微波雷達、毫米波雷達、激光雷達等。
隨著生活水平的不斷提高,人們對智能家居的需求也日益增長。存在感應技術在酒店控制、工業照明、智能安防等應用場景有著巨大需求。早期的相關產品大多采用紅外模塊、聲控模塊和光敏電阻來實現。而得益于電子半導體技術的發展和相關元器件價格的降低,現階段使用高頻雷達實現這一功能的存在感應開關得以實現。
本文淺析一種雷達在存在感應開關中的應用方案,并通過實際測試驗證各頻段方案與感應開關應用場景的契合度。
1 頻段方案
本次實驗分析的頻段方案,從低到高可分為:紅外、多普勒(CW)微波、60 GHz毫米波、77~ 79 GHz毫米波。其中紅外又分為(被動)PIR和主動PIR方案:多普勒(CW)微波分為24 GHz和5.8 GHz方案;60 GHz毫米波分為FMCW毫米波雷達和CW毫米波雷達。
1.1 方案選擇
1.1.1 紅外PIR
現有的產品低成本方案大多采用紅外人體感應技術。使用菲涅爾鏡片,增強對人體的紅外輻射敏感度,同時抑制環境干擾影響。通過菲涅爾透鏡的聚焦作用,紅外信號將檢測區內分為若干個明區和暗區;當人體經過檢測區時產生變化熱釋紅外信號,從而產生變化電信號(圖1)。
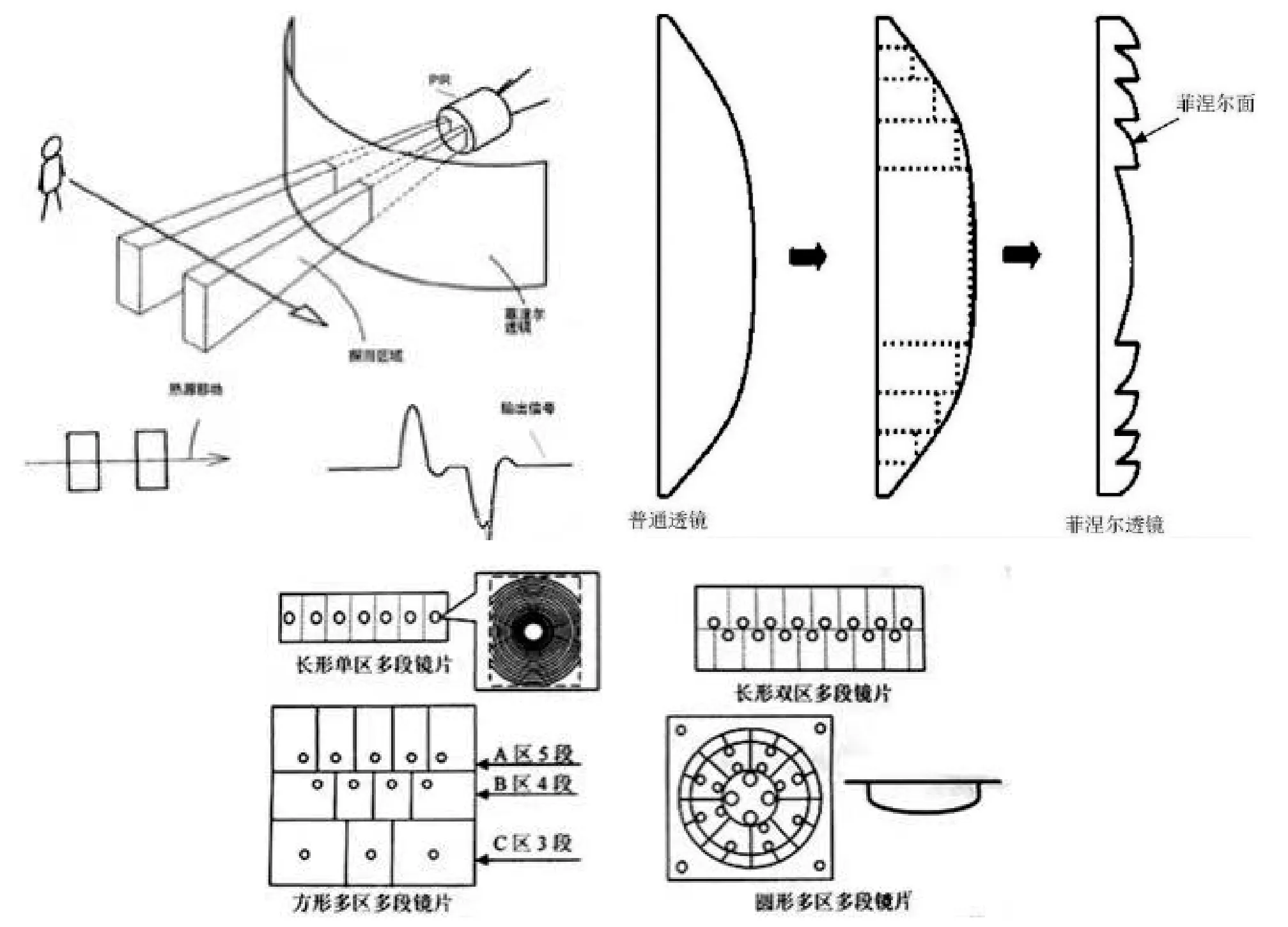
圖1 紅外技術原理
此類技術相對成熟,價格低廉、功耗低(微安級功耗,適用于單火線開關),被動PIR不會發出任何類型的輻射,隱蔽性較好。但同時缺點也比較明顯:
1)受熱源干擾。
2)被動紅外穿透力差。
3)易受射頻輻射干擾。
4)環境溫度和人體溫度接近時,靈敏度低。
5)橫向運動效果尚佳,徑向運動檢測能力較差。
6)需要在外面板安裝涅菲爾透鏡。
綜上各種缺陷,很多場景已經不能完全滿足用戶需求。
1.1.2 多普勒雷達
多普勒雷達是一種較成熟的脈沖雷達(圖2)。相比紅外PIR方案,多普勒雷達解決了熱源干擾的問題,檢測靈敏度也不受溫度影響。微波信號可以穿透玻璃、薄木板等墻體實現檢測,角度大,反應快。同時因其運用了多普勒頻移效應,故對徑向運動人體的檢測能力大大提高,但橫向的運動難以監測,且依然存在難以檢測靜物,精確度低,難以抵抗電磁干擾等問題。這些是多普勒雷達的物理缺陷,難以彌補。
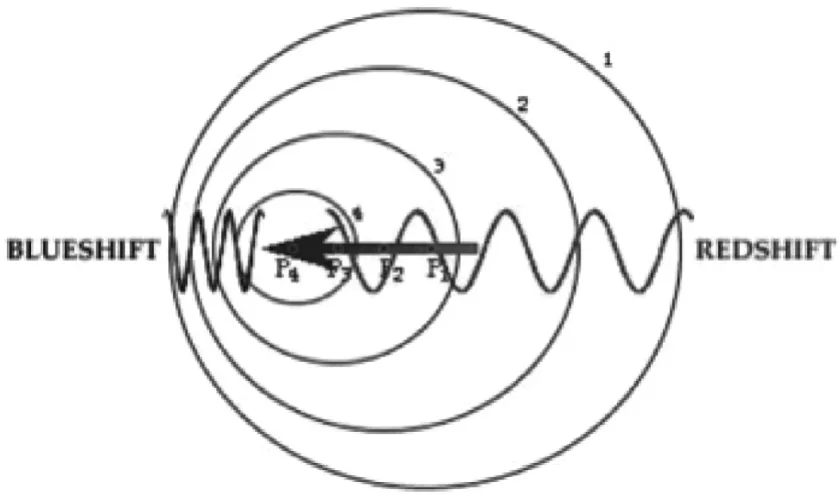
圖2 多普勒原理
1.1.3 FMCW毫米波雷達(77~79 GHz毫米波)
FMCW毫米波雷達是指調相連續毫米波雷達。高頻FMCW毫米波雷達幾乎滿足所有對人體存在感應傳感器的全部要求,檢測精準,防干擾、耐污防潮。
但是,一方面因為其較高的功耗和較大的模塊體積,難于在小場景設備中應用;另一方面囿于法律法規相關限制,77 GHz~79 GHz的FMCW毫米波雷達只能應用于汽車領域。故排除此方案。
1.1.4 60 GHz毫米波
此頻段涵蓋了FMCW和CW毫米波雷達兩種方案。理論上,越高的雷達頻率對應著越高的檢測分辨率,和更好的檢測效果。
從生理學角度來看,正常人體生理活動可由人體的體表微動信息來反映如圖3,例如可通過胸腔的振動來得到呼吸、心跳等活動信息。心搏引發的胸壁位移幅度為0.6 mm,呼吸時產生的胸壁位移幅度則在4~12 mm左右。
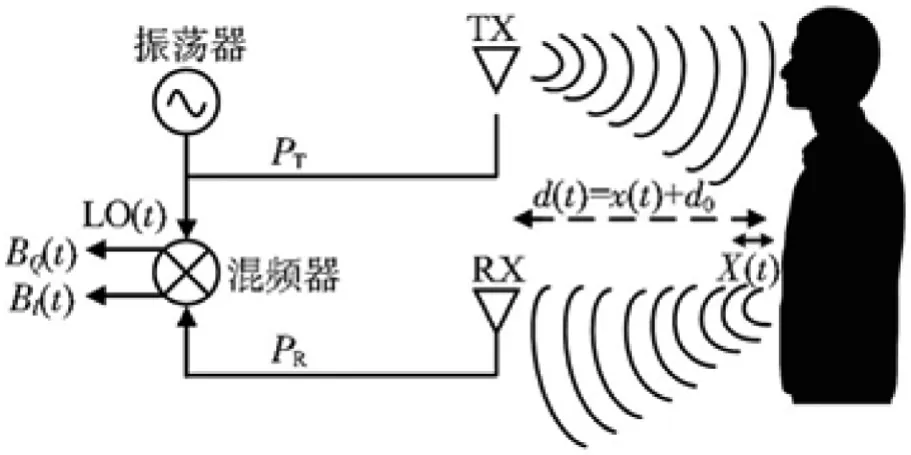
圖3 雷達檢測人體原理
若假設模塊使用10 GHz雷達來檢測胸腔運動,通過計算:每1 mm的位移則會引起相對最大25.2 °的信號相位偏移。故而說,在雷達頻率足夠高時,即使是很小幅度的胸腔振幅,基帶信號的相位偏移量也能夠被設備分辨出來[1]。
但是若工作頻率過高,則雜波干擾也會相應增大。通常情況下生物雷達會選取2.4~60 GHz的頻率。
所以調頻連續波雷達在不影響感應效果的情況下,降低波的頻率至符合相關法律規定的范圍,同時又可以降低頻率和模塊體積。圖4為毫米波、多普勒微波、紅外技術對比。基于此原理的60 GHz的FMCW毫米波雷達 ,是人體感應開關傳感器的較優選擇。

圖4 毫米波、多普勒微波、紅外技術對比
2 方案驗證
為了驗證上述方案在實際測試和使用環境中的表現,設置了以下幾個模擬場景的驗證測試。通過將FMCW毫米波雷達與傳統紅外的方案測試結果相對比,驗證是否符合理論預期。
2.1 靜止測試
在一無強磁場、輻射或熱源干擾、空曠的25 ℃室溫實驗場景下,將FMCW毫米波雷達模塊和紅外人體感應模塊置于同一位置,多次分別在不同距離位置設置一靜止不動的測試人員。上電后檢查反饋信號:是否能檢測到人體存在;是否可以持續檢測到人體存在。
從表1測試結果來看基本符合理論預期,紅外模塊難以感應靜止的人體目標,而在FMCW毫米波雷達的監測范圍內則可以持續感應有無靜止人體。
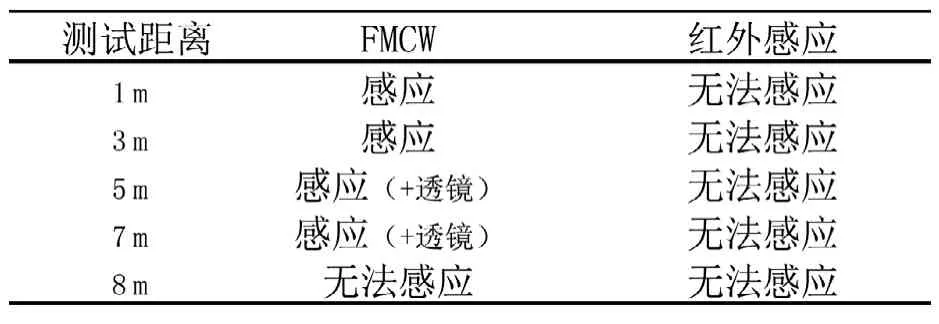
表1 人體靜止檢測
2.2 穿透測試
在一無強磁場、輻射或熱源干擾、空曠的25 ℃室溫實驗場景下,將FMCW毫米波雷達模塊(無外置透鏡天線)和紅外人體感應模塊置于同一位置,多次分別使用木板、玻璃和墻壁將測試人員與測試模塊隔離。上電后檢查反饋信號:是否能檢測到人體存在,以此測試傳感器識別運動人體的穿透性能。
從表2測試結果來看, FMCW毫米波雷達的信號可以穿透一般的木板和玻璃,但無法穿透墻壁。而紅外感應模塊均無法穿透。

表2 墻壁穿透測試結果
2.3 溫度測試
在一無強磁場、輻射干擾的空曠實驗場景下,將FMCW毫米波雷達模塊(無外置透鏡天線)和紅外人體感應模塊置于同一位置。在25 ℃、35 ℃和40 ℃的環境溫度下測試兩種模塊的工作狀態是否受到干擾。
從表3測試結果來看基本符合理論預期, FMCW毫米波雷達的工作不受溫度影響。而紅外人體感應原理是檢測溫差,故受溫度影響很大。

表3 溫度干擾測試結果
2.4 距離測試
在一無強磁場、輻射或熱源干擾、空曠的25 ℃室溫實驗場景下,將FMCW毫米波雷達模塊(無外置透鏡天線)和紅外人體感應模塊置于同一位置,多次分別在不同距離位置設置運動的測試人員。上電后檢查反饋信號:是否能檢測到人體存在,以此測試傳感器識別運動人體的極限距離。
理論上來講,雷達在不同的功率和尺寸下的有效檢測范圍有很大差別,本次的感應距離-實驗結果僅代表在本次實驗中使用的兩組功率較低,透鏡尺寸相仿的感應模塊。
從表4的測試結果來看,試驗所使用的紅外與FMCW毫米波雷達無外置透鏡天線的狀態下,FMCW毫米波雷達的動態人體監測距離范圍略小。在配置外置透鏡天線后的FMCW毫米波雷達的感應距離會超過紅外感應距離,但相應的橫向感應的角度會隨之降低,在產品化過程中應參考具體應用場景選擇是否加裝外置透鏡天線。
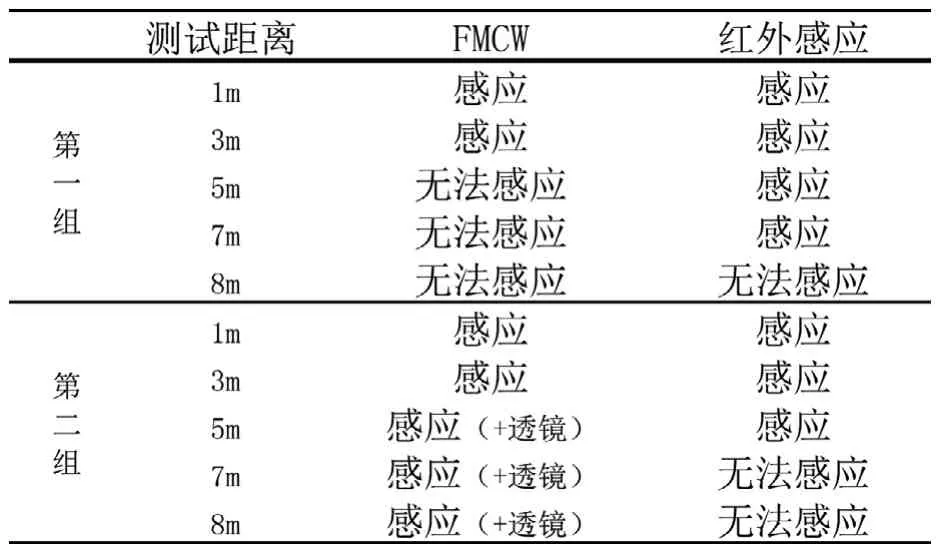
表4 檢測范圍測試結果
3 設計方案
伍衍亮、趙宇和龔梁提出一種方案——基于60 GHz毫米波雷達的人體感應檢測系統。該系統可以較為精確地檢測在室內活動人員的相對距離、相對角度、運動速度、運動加速度等信息。
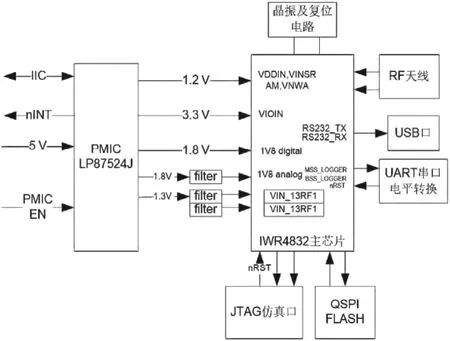
圖5 系統結構
整個系統主要分為:芯片模塊、天線模塊、電源模塊及外圍電路部分。主芯片模塊使用TI公司的IWR6843芯片,其內部集成了DSP系統(DSS)、雷達波系統(BSS)和主子系統(MSS)。BSS主要負責射頻信號處理,DSS主要負責信號處理,MSS主要負責跟蹤、分類等算法和上層應用的實現。天線模塊負責發射和接收雷達信號,同時也會將波形進行對比計算以實現對目標物距離、角度或運動速度的檢測。電源模塊為整個系統的各模塊提供不同的穩定電壓。外圍電路包括但不限于晶振及復位電路、QSPI FLASH、JTAG仿真口、USB口、UART串口等。
該方案通過分類、濾波、追蹤等算法,來檢測室內人體運動狀態信息。可有效地區分人和非人(包含運動狀態家具如風扇等),以及判斷人體的環境位置。經過實驗驗證(結果見圖6、圖7),該系統正常情況下水平檢測角度可達到±75 °,垂直檢測角度為±40 °,檢測最大距離為8 m。系統檢測精度≤0.1 m,角度輸出精度≤1 °。功能測試中,在部分實驗場景的綜合檢測準確率≥90 %,與以往的人體檢測方案相比:抗干擾能力更強(不受煙霧、溫度和光線等影響)、檢測范圍更廣、檢測精度更高。該方案在智能家居和人體感應開關領域,具有一定的研究和參考價值[2]。
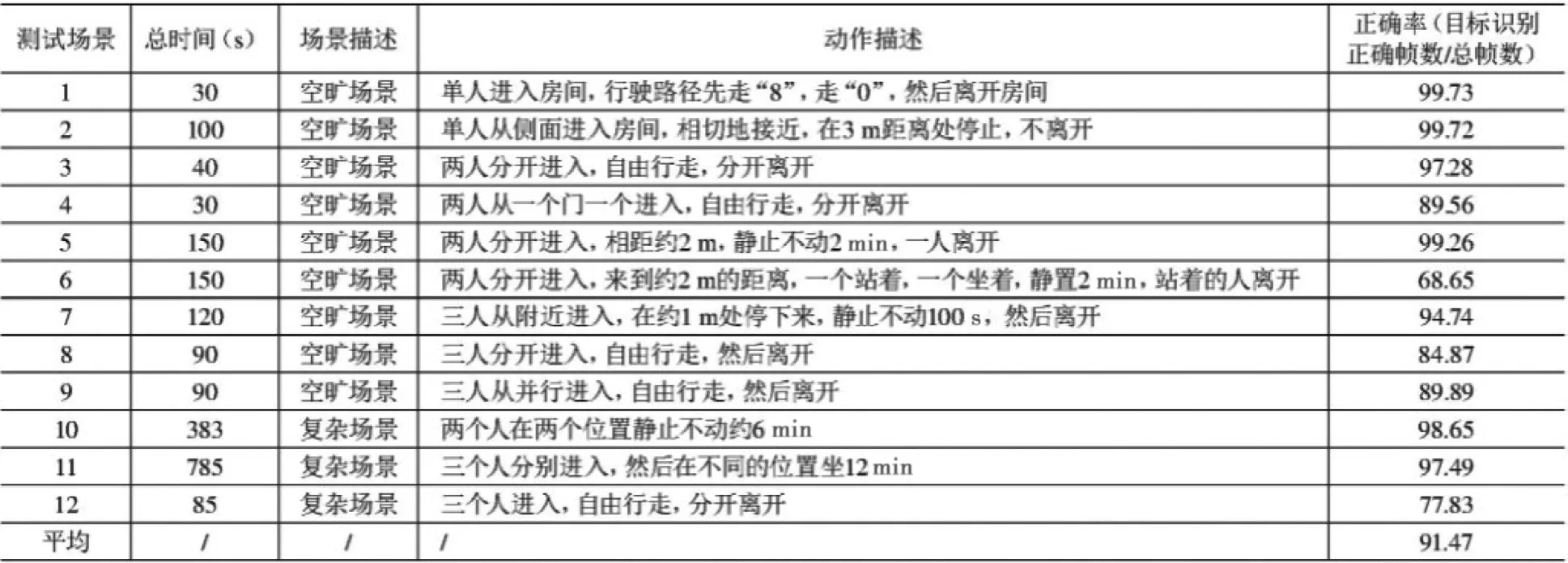
圖6 準確率測試
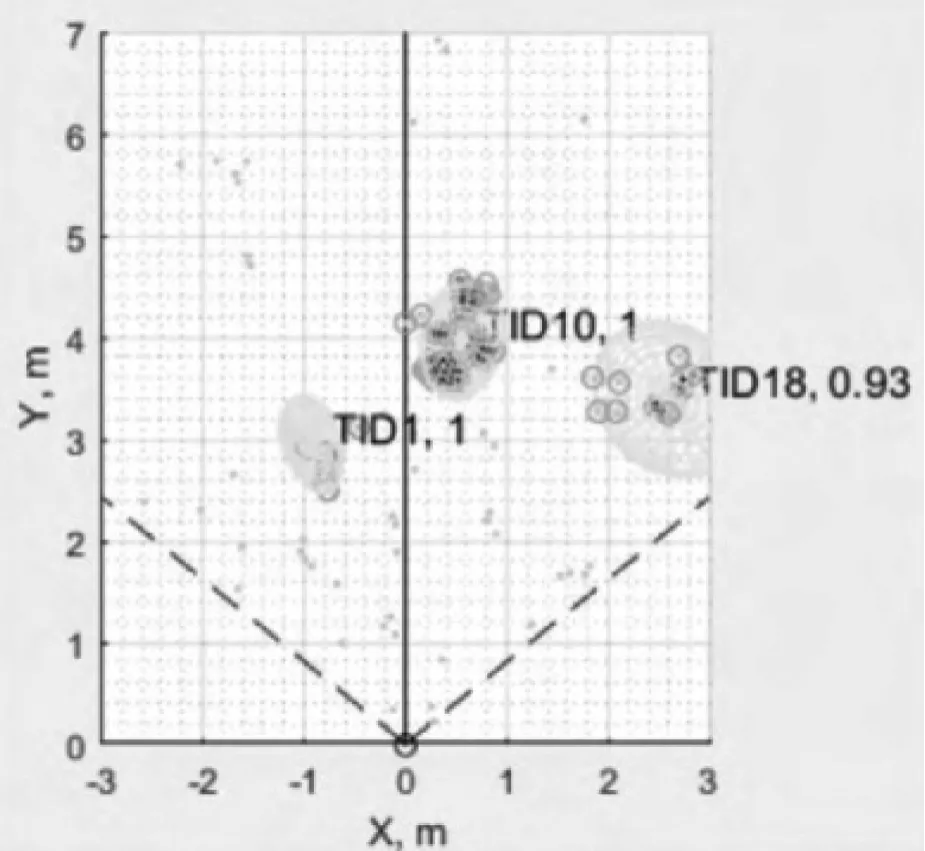
圖7 檢測結果
4 結語
本文淺析了幾種主流的雷達傳感器方案在人體感應開關場景中的優劣。通過實際測試,對傳統紅外感應模塊和現階段高頻雷達技術在人體感應開關中的應用場景進行復現和比較,對理論預期進行了數據驗證,并給出了一種調頻連續毫米波雷達的設計方案。
在未來可以嘗試結合不同發射信號種類,如:脈沖雷達和連續波雷達相結合的方案,以此在不降低檢測分辨率的情況下,實現進一步降低雷達頻率,縮減功耗和模塊體積。對于相關產品的應用化工作有一定的借鑒和指導意義。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
