航空發動機外形點云的保特征去噪方法
2021-12-15 05:19:00閆杰瓊周來水胡少乾文思揚
中國機械工程 2021年23期
閆杰瓊 周來水 胡少乾 文思揚
南京航空航天大學機電學院,南京,210016
0 引言
我國航空發動機的設計制造還不能完全滿足國產飛機的生產需求,目前國產飛機還存在較多使用外購發動機的情況。我國的飛機設計制造已全面采用三維數字化技術,而外購發動機只有實物及安裝尺寸等信息,沒有發動機的三維數字化模型,這給飛機與發動機的裝配協調設計帶來較大困難,因此,飛機設計部門對快速重構航空發動機的外形幾何模型、為飛機設計提供航空發動機的數字化協調樣機提出了迫切的需求。
通過三維激光掃描設備獲取的點云數據受設備精度、環境光線、被測物體表面材質等因素的影響,不可避免地帶有噪聲。航空發動機外形點云可大致分為機匣裝配體和管路系統兩部分,包含機匣殼體、管路、凸臺、加強筋、成附件、卡箍等結構特征,它們分別起承力、包容、連接、密封和固定作用。這些結構特征形狀復雜,現有去噪方法會不同程度地模糊或破壞掉這些結構的尖銳特征(加強筋的尖銳棱邊)、薄壁特征(前后安裝邊和縱向安裝邊的薄壁結構)和細節形狀特征(凸臺、全島、半島、沉槽和螺栓),會直接影響最終發動機外形幾何模型的重建精度,因此需要研究一種點云保特征去噪方法,在去除噪聲的同時,盡可能保護上述結構的各種幾何特征,為后續重建提供高質量點云。
現有的保特征去噪方法可分為以下五類。
(1)基于雙邊濾波的去噪方法。這類方法[1-5]有一定的保特征效果,但雙邊濾波因子依賴于局部鄰域信息,容易出現平滑區域過度光順的問題,面對大尺度噪聲時,這類方法的錯誤判斷會丟失特征點。
(2)基于表面重建的去噪方法。這類方法的原理是先擬合點云數據生成局部平面,然后再將周圍的測量點投影到局部平面上。移動最小二乘擬合法(MLS)[6]、魯棒移動最小二乘擬合法(RMLS)[7]和隱式移動最小二乘擬合法(IMLS)[8]對小尺度噪聲的魯棒性較好,有一定的保特征能力,但不能很好地處理離群點,且處理高曲率或低采樣率的區域時容易出錯。為解決上述問題,魯棒隱式移動最小二乘擬合法(RIMLS)[9]在投影前先對法向量場進行雙邊濾波,可以在一定程度上保持特征,但是該方法容易將特征另一側的點當作離群點處理。代數點集曲面(APSS)方法[10]采用代數球面擬合局部區域進行投影實現去噪,但原始模型的細節特征會失真。
(3)基于粒子的去噪方法。這類方法的原理是從點云中選擇一部分點成為粒子,通過改變粒子的位置,逼近真實的底層表面來達到去噪效果。局部最優投影(LOP)[11]、權重局部最優投影(WLOP)[12]、各向異性權重局部最優投影(AWLOP)[13]和連續局部最優投影(CLOP)[14]可以在一定程度上保持尖銳特征,但當輸入點云的噪聲尺度比較大時會出現過度尖銳的問題,輸入點云相對稀疏時也很難有好的表現。
(4)基于特征的去噪方法。前三類方法在不同特征區域很難自適應調整輸入參數,容易引起特征過度光順或過度尖銳。基于特征的去噪方法[3,15-17]提出要先對特征區域與非特征區域進行分類識別,然后分別采用不同的濾波方法對點云數據進行去噪,缺陷是時間成本較高。林洪彬等[18-19]根據點云的局部分布特性自適應地調整了濾波主方向和各主方向的衰減速度,可以在一定程度上保持原始模型的尖銳特征,但依舊需要用戶指定三個參數,未能實現全自動。
(5)基于學習的去噪方法。現有的保特征去噪方法對復雜點云進行處理時,通過反復試驗也很難確定一組可以在去除噪聲和保留特征之間達到平衡的輸入參數。為了解決過度光順和反復調參的問題,研究人員將目光轉向在圖像去噪[20-23]和網格去噪[24-25]中應用得非常好的基于學習的去噪方法。在PointNet[26]基礎上,RAKOTOSAONA等[27]提出了直接應用于點云的噪聲點去除和離群點判斷的PointCleanNet,網絡完成訓練之后,不需要參數調整即可直接應用于測試集中各種尺度、各種形狀的噪聲點云,相比于傳統方法,去噪效果得到了改善。
針對航空發動機外形點云結構特征多、形狀不規則、分布無規律、尺寸差異大、細節豐富等特點,提出了一種基于深度學習的點云保特征去噪方法,可以在去除噪聲的同時保護加強筋、凸肩和機匣殼體的尖銳棱邊,保留安裝邊的薄壁結構,并且從噪聲數據中恢復出形狀、大小、位置準確的凸臺,有利于后續重建出準確的發動機外形幾何模型。
1 外形點云的保特征去噪方法


圖1 航空發動機外形結構特征Fig.1 Structural features of aero-engine profile
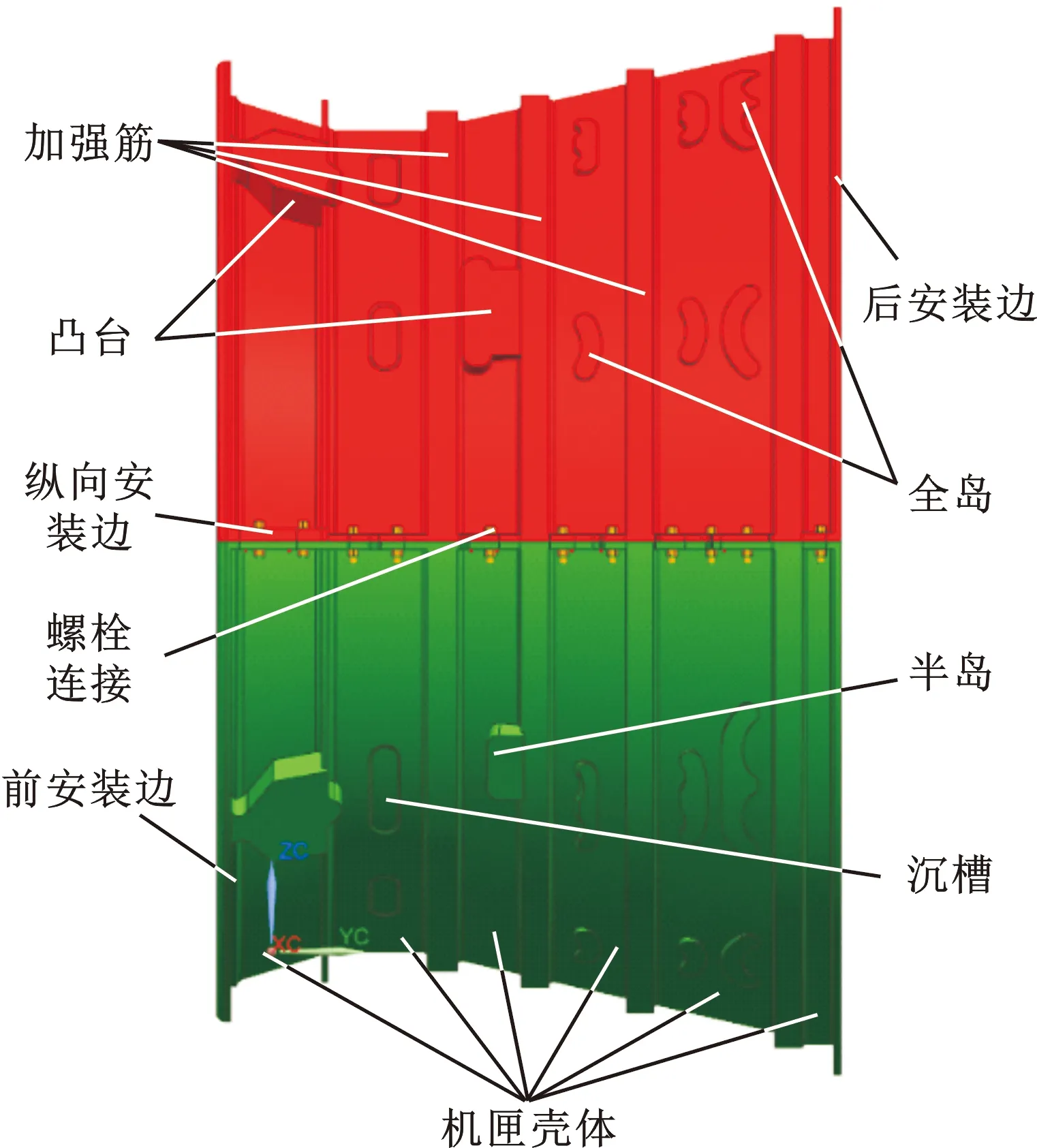
圖2 航空發動機機匣結構特征Fig.2 Structural features of aero-engine casing
1.1 保特征去噪模型
航空發動機外形點云的特征分割方法(下稱“特征分割方法”)已經將X′分為特征噪聲點集P′與非特征噪聲點集Q′,即
(1)

(2)
(3)
基于深度學習的保特征去噪方法通過設計兩種不同的去噪網絡,定義了兩種非線性函數g和h,用來預測特征和非特征噪聲patch中心的位置修正向量,將噪聲patch中心向模型真實底層表面移動,即
(4)
(5)
(6)
特征分割方法對噪聲尺度為0.005b的發動機外形點云的分割結果如表1所示。相比于形狀規則簡單的機匣殼體、加強筋、安裝邊和管路,凸臺、島嶼、螺栓、成附件、管接頭和卡箍等結構包含了豐富的細節形狀。前者被識別為非特征數據,后者被識別為特征數據,分割精度達到了93.42%,實現了高精度語義分割。
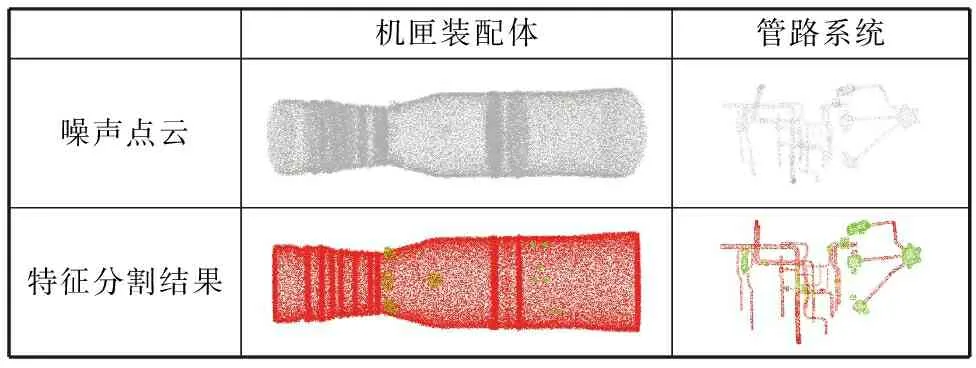
表1 航空發動機外形點云的特征分割結果
選擇patch作去噪網絡的輸入而不是整體點云的原因如下:一方面整體點云更適合對象分類和模型分割任務,通過從整體點云中抽象出一個全局特征向量來預測每個點屬于不同類別或者不同數據塊的概率,預測噪聲點向著模型表面移動的位置修正向量很大程度上依賴于局部范圍內的形狀信息;另一方面處理整體點云是非常有挑戰性的,整體點云之間的形狀差異要遠遠高于patch之間的形狀差異,處理整體點云不僅需要更多的訓練數據和更強的網絡計算能力,而且在處理高密度點云時還會導致高內存復雜性。
從整體點云中選擇patch中心,采用IFPS方法的原因是IFPS相比隨機采樣可以更好地表示整個點云的分布情況(表2),即使選擇的采樣點個數只是整體點云個數的2.5%,也足夠表達該模型的大體形狀,并且與原始點云的密度分布是一致的,隨機采樣會造成采樣點局部黏結。
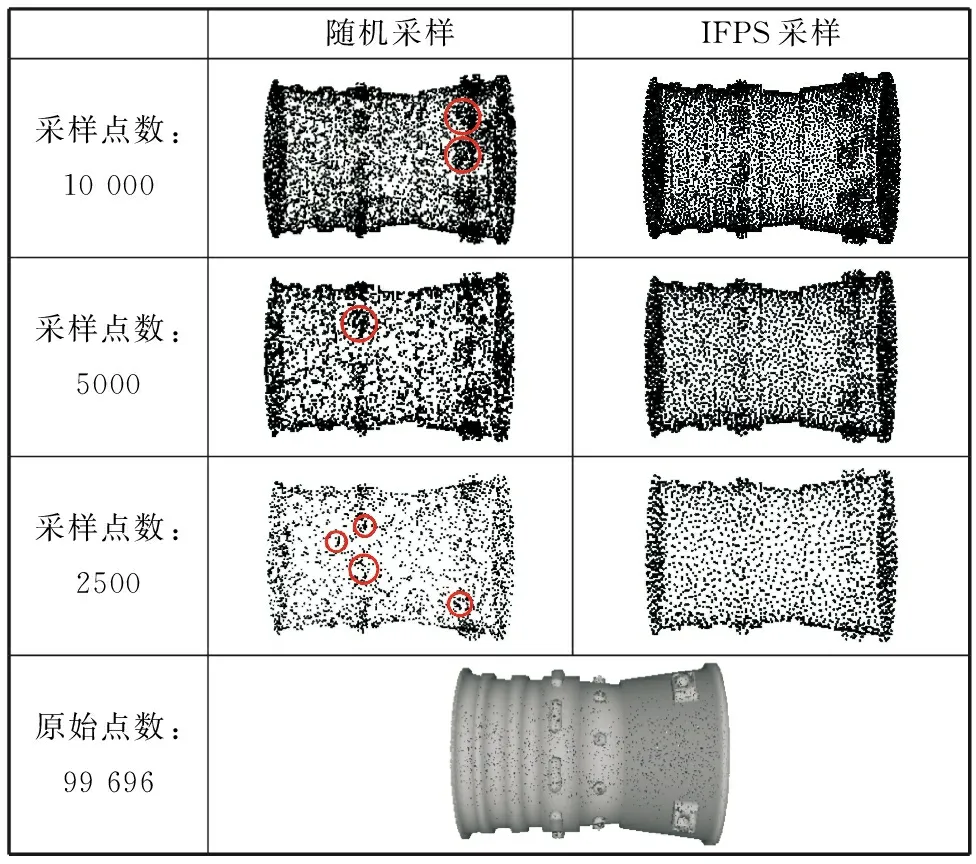
表2 IFPS與隨機采樣對比
1.2 保特征去噪流程
特征去噪網絡和非特征去噪網絡的訓練過程如圖3、圖4所示,保特征去噪方法如圖5所示,可以看出,基于深度學習的保特征去噪方法的兩個重要組成部分是保特征去噪網絡和保特征去噪數據集,其實質是一個先訓練再求解的過程。具體步驟如下:
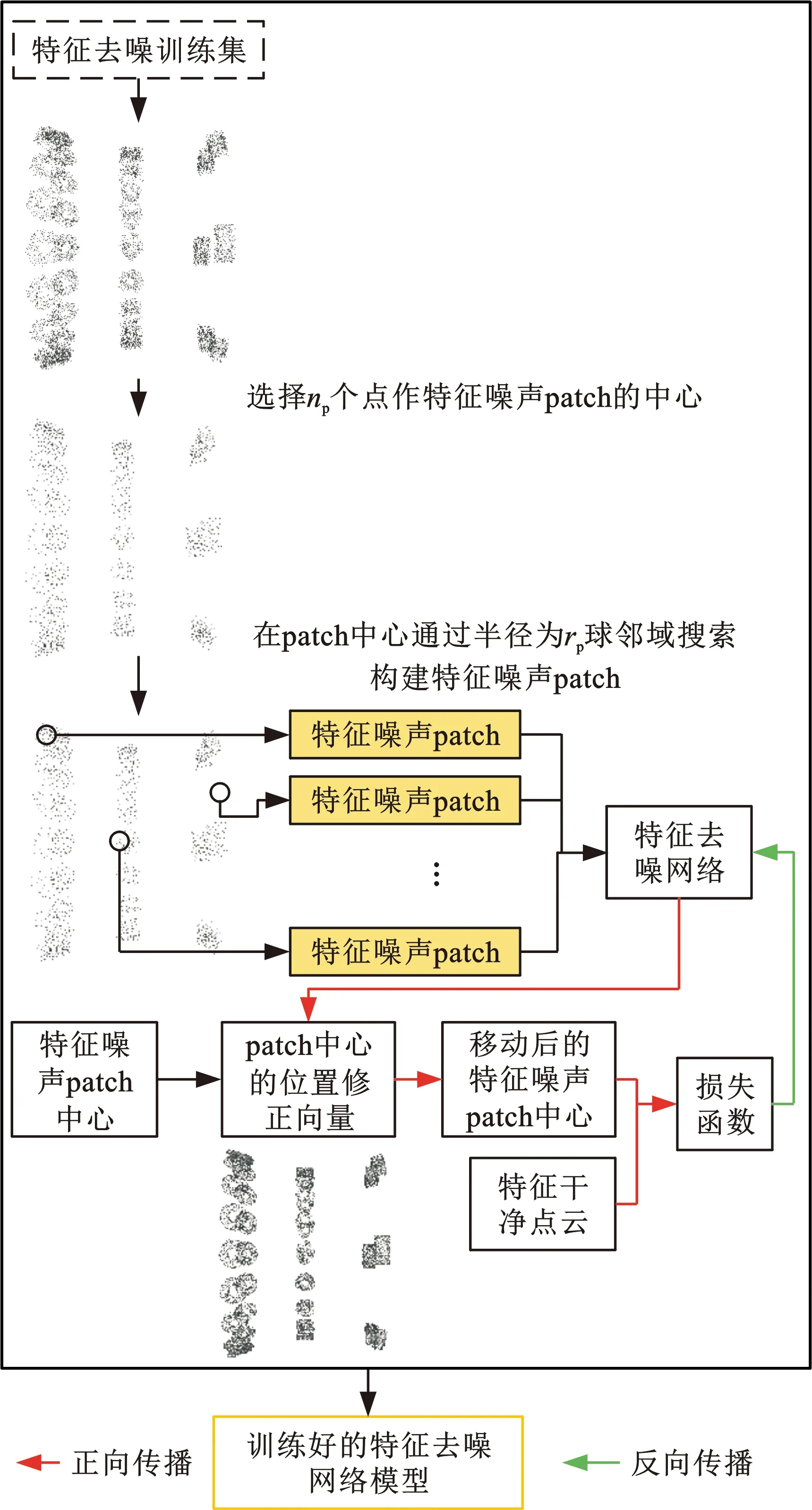
圖3 特征去噪網 絡的訓練過程Fig.3 The training process of feature denoising network
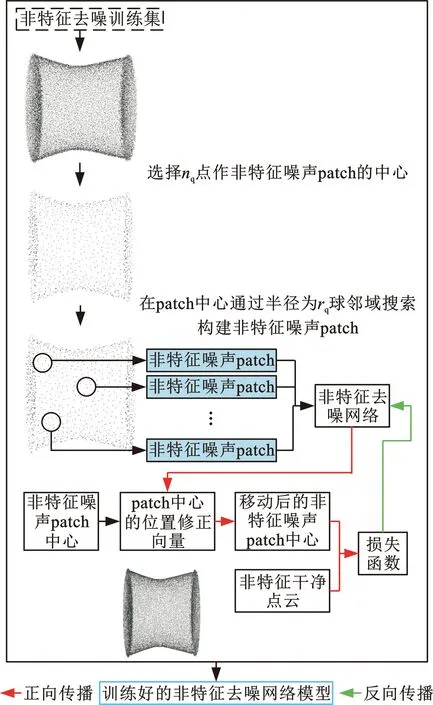
圖4 非特征去噪網絡的訓練過程Fig.4 The training process of non-feature denoising network
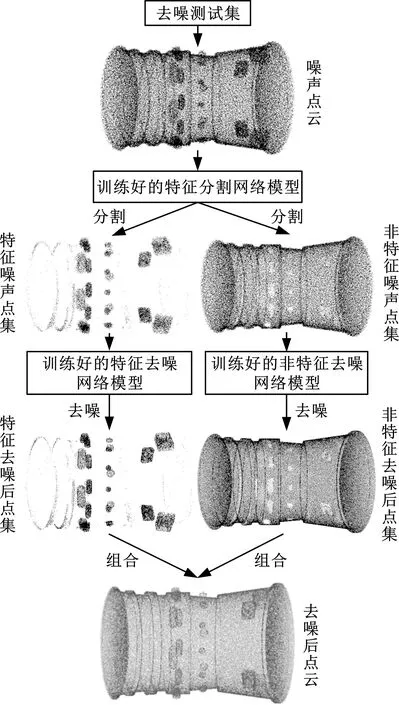
圖5 保特征去噪方法Fig.5 Feature-preserving denoising method
(1)從特征去噪訓練集和非特征去噪訓練集中各自選擇一個整體點云,分別構建特征噪聲patch和非特征噪聲patch,作為兩種去噪網絡的輸入;
(2)去噪網絡綜合從patch中收集到的形狀信息,預測噪聲patch中心的位置修正向量;
(3)噪聲patch中心沿著網絡預測的位置修正向量移動;
(4)利用損失函數統計移動后的噪聲patch中心逼近模型真實底層表面的程度,將誤差反向傳播給去噪網絡;
(5)重復步驟(1)~步驟(4),觀察損失函數的收斂情況,當誤差不再減小時,訓練完畢;
(6)從去噪測試集中選擇發動機外形噪聲點云,利用訓練好的特征分割網絡模型將其分為特征噪聲點集和非特征噪聲點集;
(7)分別輸入訓練好的特征去噪網絡模型和非特征去噪網絡模型,每個點都作一次patch中心,即可得到特征去噪后點集和非特征去噪后點集;
(8)組合上述兩種點集即可獲得發動機外形去噪后點云。
2 外形點云的保特征去噪網絡
如圖6所示,選擇B個patch中心,組成mini-batch作為去噪網絡的輸入。每種去噪網絡都有其對應的局部鄰域編碼器,用于將局部表面片中包含的形狀信息抽象成特征向量,要求是可以充分捕捉各種形狀的細節特征,捕捉到的形狀信息越接近真實模型表面,去噪效果越好。添加的跳躍連接的多層感知機被命名為基礎特征提取器BasicBlock,添加跳躍連接有助于梯度傳播和提高訓練模型的性能。兩種不同的回歸器用來預測噪聲patch中心的位置修正向量。
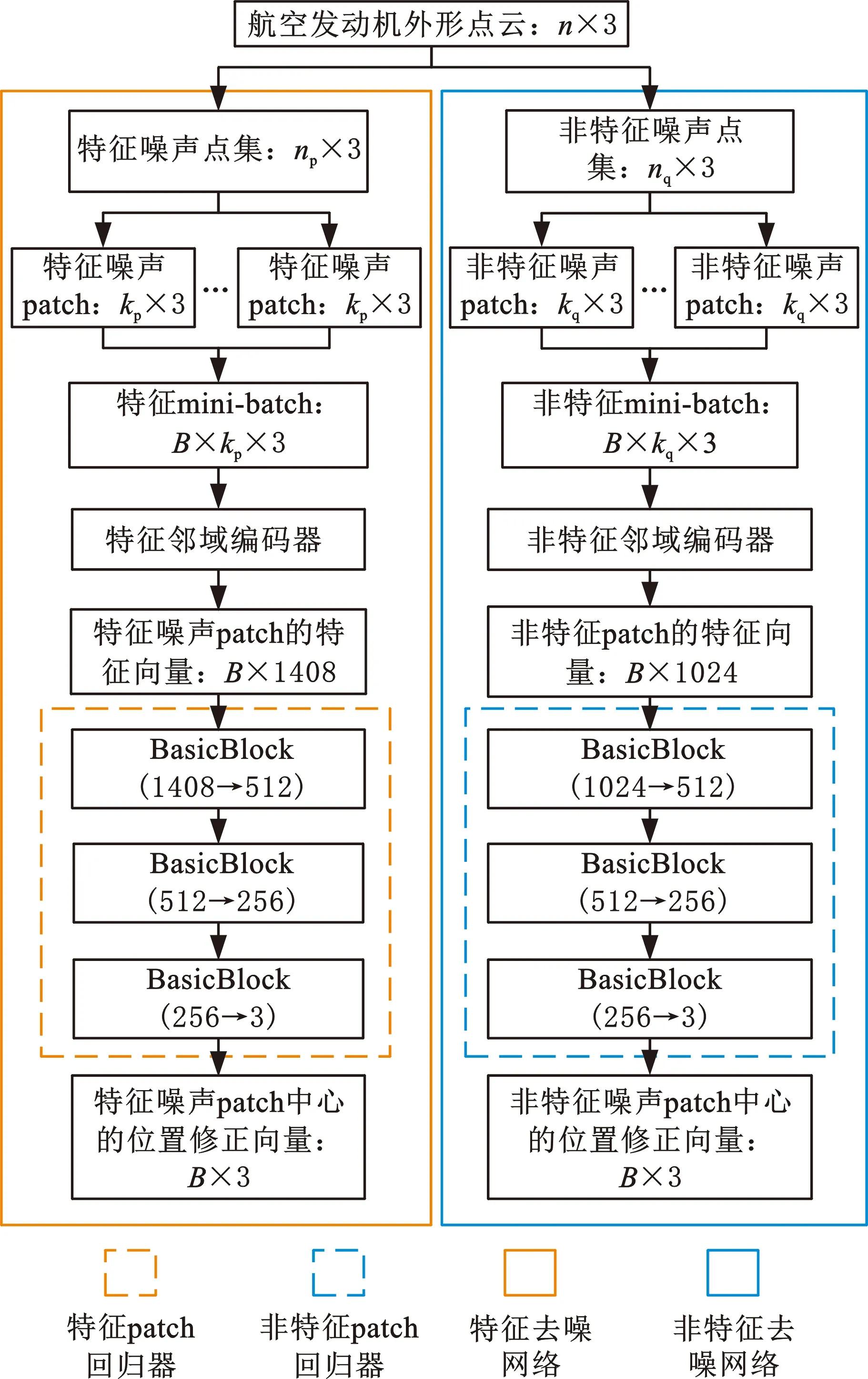
圖6 保特征去噪網絡Fig.6 Feature-preserving denoising network
2.1 非特征鄰域編碼器
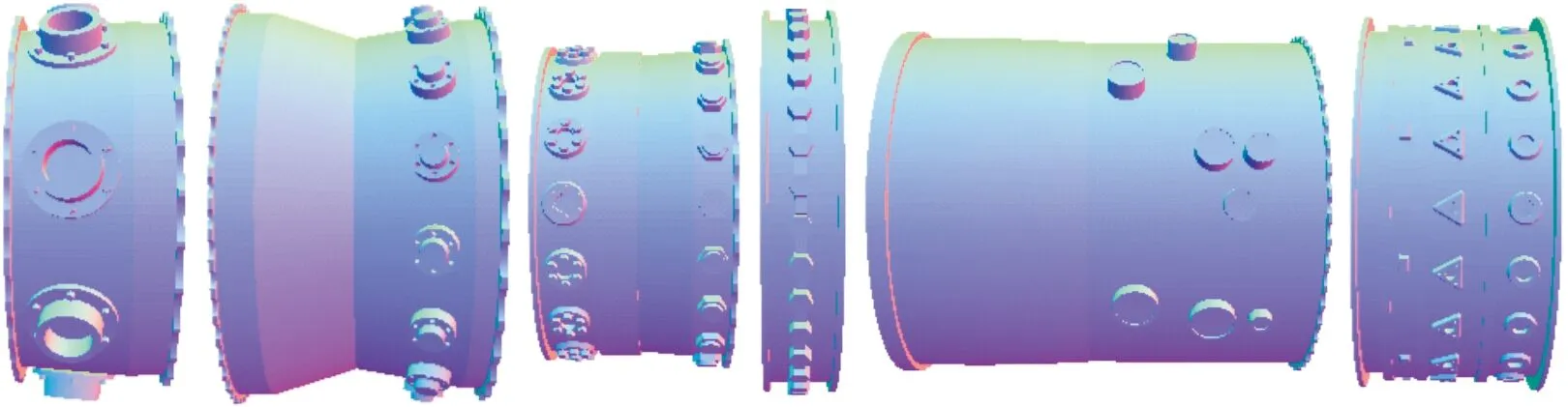
如圖7所示,航空發動機機匣是環狀回轉殼體類零件,被特征分割方法提取出的機匣殼體、加強筋和安裝邊結構一般是圓柱面或圓錐面,不包含復雜的細節特征。加強筋和安裝邊附近,形狀復雜的凸臺和島嶼特征被移除,構建非特征噪聲patch時,局部鄰域內的點是具有相同形狀特點的,基于此非特征去噪網絡可以更加準確地預測出噪聲patch中心的位置修正向量,達到保護安裝邊薄壁結構和加強筋尖銳棱邊的目的。
(a) 機匣整體網格模型 (b) 分割后機匣非特征的網格模型
如圖8所示,非特征鄰域編碼器先通過一種被限定為旋轉的空間轉換網絡(quaternion spatial transformer network,QSTN)生成一個B×3×3的旋轉矩陣(圖9),從而將B個patch旋轉至規范位置。去噪網絡的預測結果也需經過這個旋轉變換的逆變換,再應用于非特征噪聲patch中心。然后通過兩層基礎特征提取器BasicBlock將經過QSTN變換后的特征向量B×3×kq抽象至64維特征空間,得到中間特征向量B×64×kq。在此基礎上,直接用三層BasicBlock將中間特征向量抽象至1024維特征空間,最大池化出高級特征向量B×1024×1,并作為包含非特征噪聲patch全部形狀信息的特征向量,遞送給非特征patch回歸器。
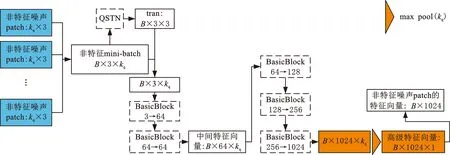
圖8 非特征鄰域編碼器Fig.8 Non-feature neighborhood encoder
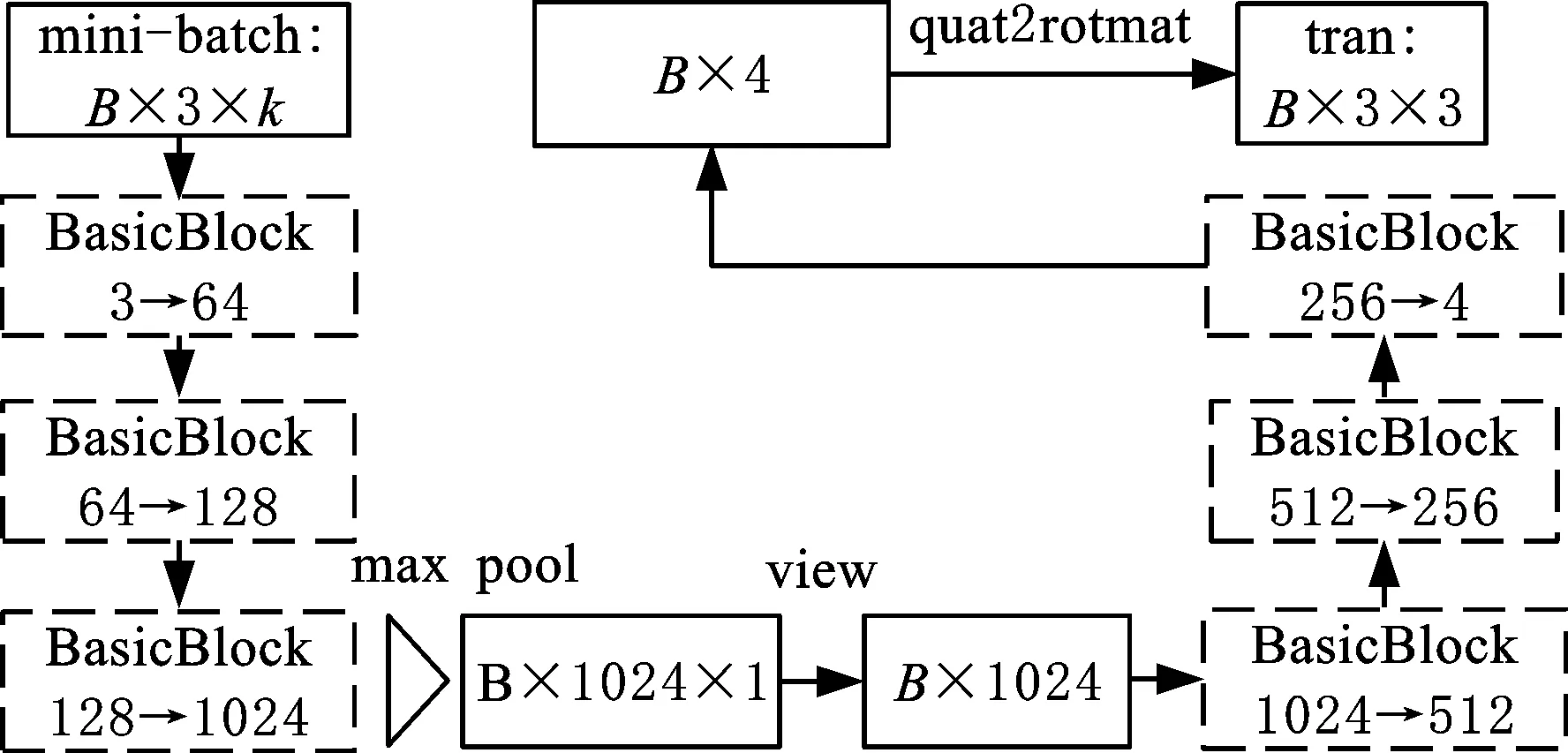
圖9 QSTN網絡結構Fig.9 QSTN network structure
相比PointCleanNet的鄰域編碼器,非特征鄰域編碼器移除了特征旋轉模塊STN,經過對比發現這有利于提高訓練速度和降低模型復雜度,同時去噪效果也不會受太大影響。
2.2 特征鄰域編碼器
為了在去噪過程中更好地保護甚至恢復形狀復雜、細節豐富的發動機凸臺、島嶼、螺栓、成附件和卡箍等結構特征,特征鄰域編碼器(圖10)分別將中間特征向量抽象至不同維度(128、256、1024)的特征空間,并且最大池化最后3層Basic-Block的輸出,可以獲得低級特征向量B×128×1、中級特征向量B×256×1和高級特征向量B×1024×1,這些特征可以理解為表達細節形狀的關鍵點,越底層的特征越貼近模型表面,越能表達真實的細節形狀。
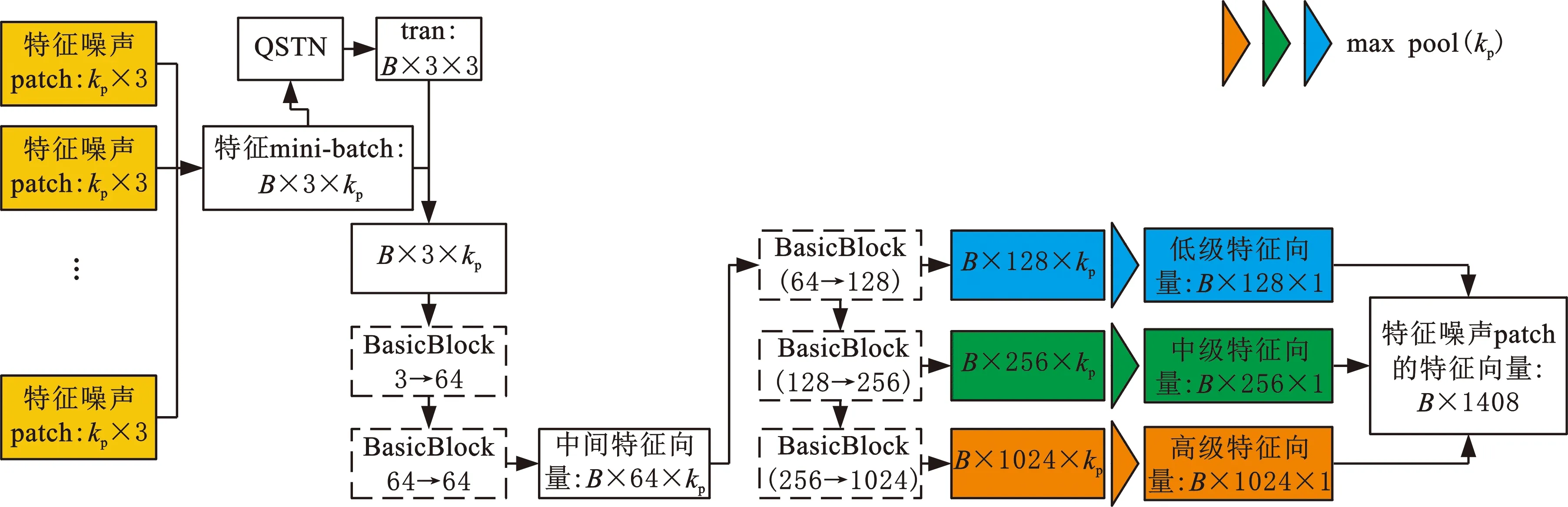
圖10 特征鄰域編碼器Fig.10 Feature neighborhood encoder
將上述特征向量合并,生成包含特征噪聲patch全部形狀信息的特征向量B×1024,并遞送給特征patch回歸器,它同時包含了低級、中級和高級特征信息,有助于提高特征噪聲patch中心位置修正向量的預測準確性,改善細節特征處的去噪效果。
3 外形點云的保特征去噪數據集
航空發動機外形點云的保特征去噪數據集包括:基礎去噪訓練集、特征去噪訓練集、非特征去噪訓練集以及保特征去噪驗證集和測試集。這些數據集分別用于訓練過程的兩個階段:第一階段采用基礎去噪訓練集,培養網絡的整體去噪能力;第二階段重點培養去噪網絡對發動機外形幾何特征的保護能力,兩種網絡分別在特征去噪訓練集和非特征去噪訓練集上進行學習。在整個訓練過程中都采用保特征去噪驗證集和測試集對模型的學習程度進行判斷,決定是否終止學習。
如圖11~圖14所示,從每個形狀的網格模型中隨機采樣10 000個點,作為干凈點云。通過給干凈點云中每個點設置四種尺度(0.005b、0.01b、0.015b、0.02b)的位移向量來生成噪聲點云。
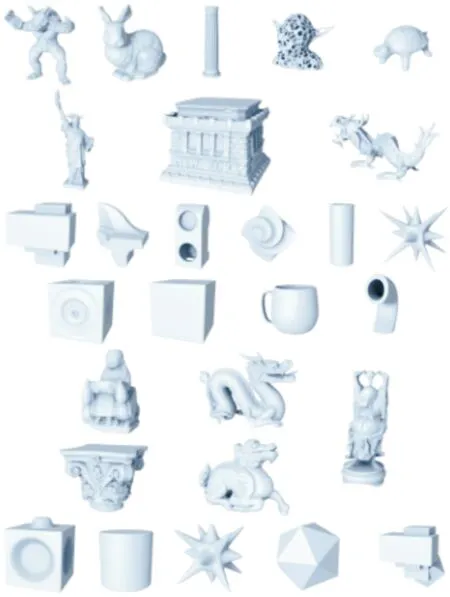
圖11 基礎去噪訓練集Fig.11 Basic denoising training set
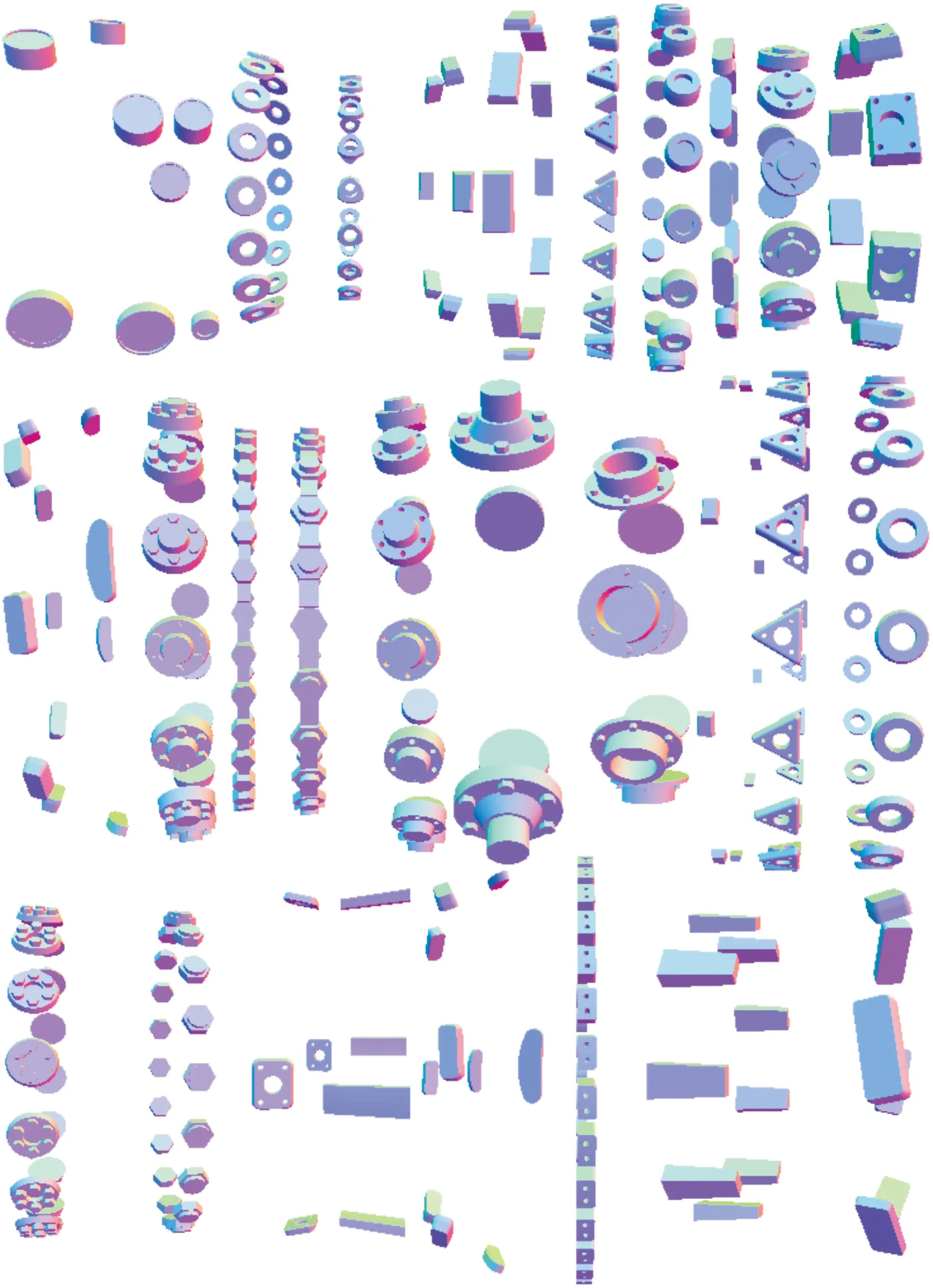
圖12 特征去噪訓練集Fig.12 Feature denoising training set
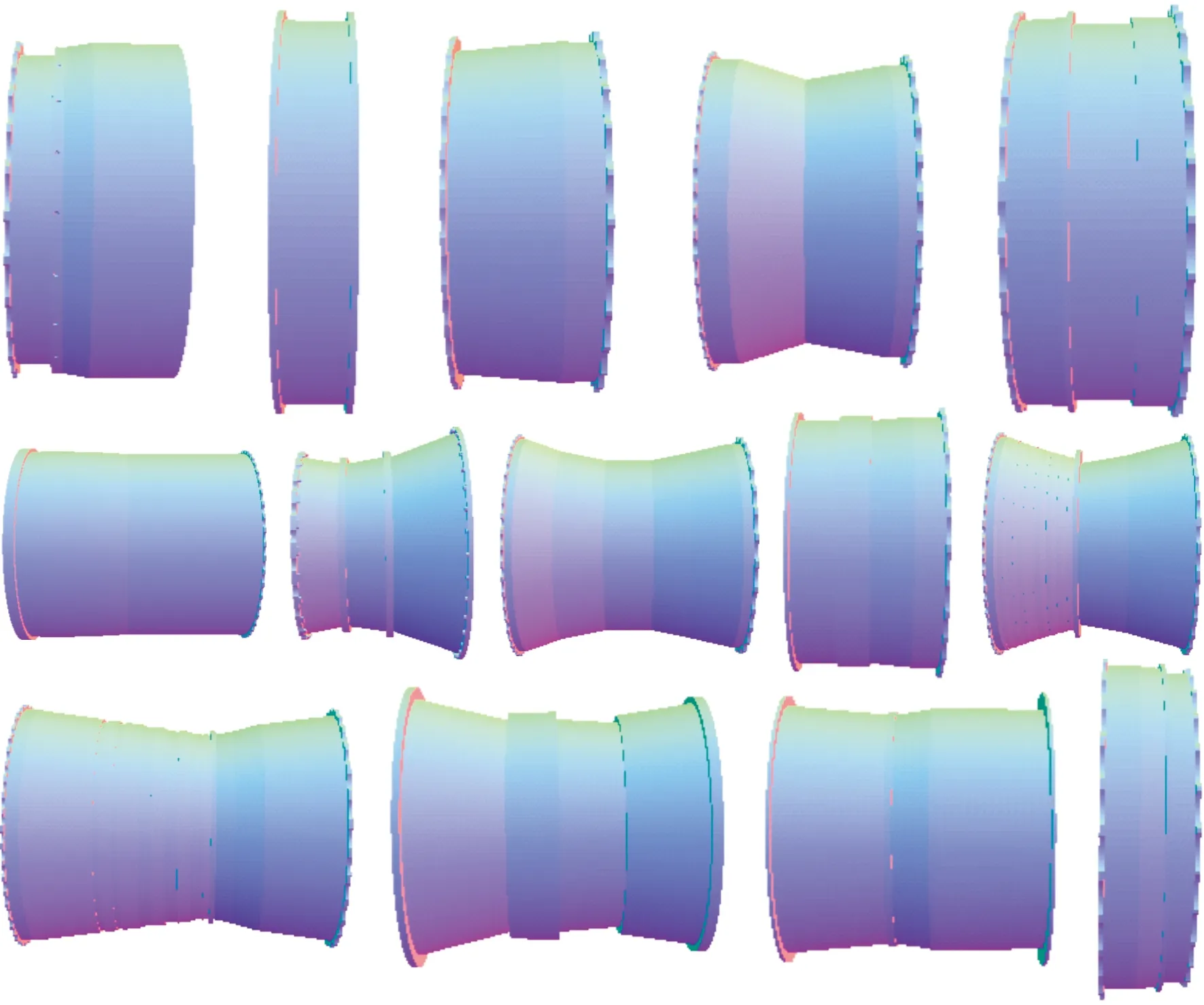
圖13 非特征去噪訓練集Fig.13 Non-feature denoising training set
(a) 保特征去噪驗證集
為了提高保特征去噪網絡在實測數據上的適應能力,需要向去噪訓練集中添加缺失和分布不均勻等缺陷。本文采用以下方式進行添加:①添加缺失缺陷。從每個形狀的整體點云中隨機選擇一部分點作中心,將其0.01b半徑范圍內的點刪除。②添加分布不均勻缺陷。不同形狀的模型體積相差很大,當采樣相同數據點時,它們相互之間的數據密度是不同的,將兩個數據密度不同的模型裝配成一個模型,就構建了數據分布不均勻缺陷。
4 外形點云保特征去噪方法的實施細節
4.1 去噪損失函數
在訓練過程中,損失函數通過統計移動后的噪聲patch中心逼近模型真實底層表面的程度來引導網絡學習。從網格模型中獲取采樣點成為干凈點云X,它同時具有兩項去噪后點云被期望的屬性,即足夠接近模型表面和均勻分布。
(7)
(8)
(9)
式中,Lloss為移動后噪聲patch中心逼近模型真實底層表面的程度;β為權重參數。
4.2 迭代去噪
通過實驗發現,將采用深度學習計算點云的位置修正向量用于去噪后仍然存在殘留噪聲。殘留噪聲與原噪聲相比,類型相同但尺度更小,因此可以采取迭代去噪的方法進一步逼近干凈點云。如圖15、圖16所示,采用不同噪聲尺度的模型進行迭代去噪時,隨著迭代次數不斷增加,殘留噪聲的尺度越來越小,在迭代到第三次以后,模型噪聲尺度趨于穩定。

(a) 原始模型 (b) 干凈點云 (c) 0.005b噪聲點云
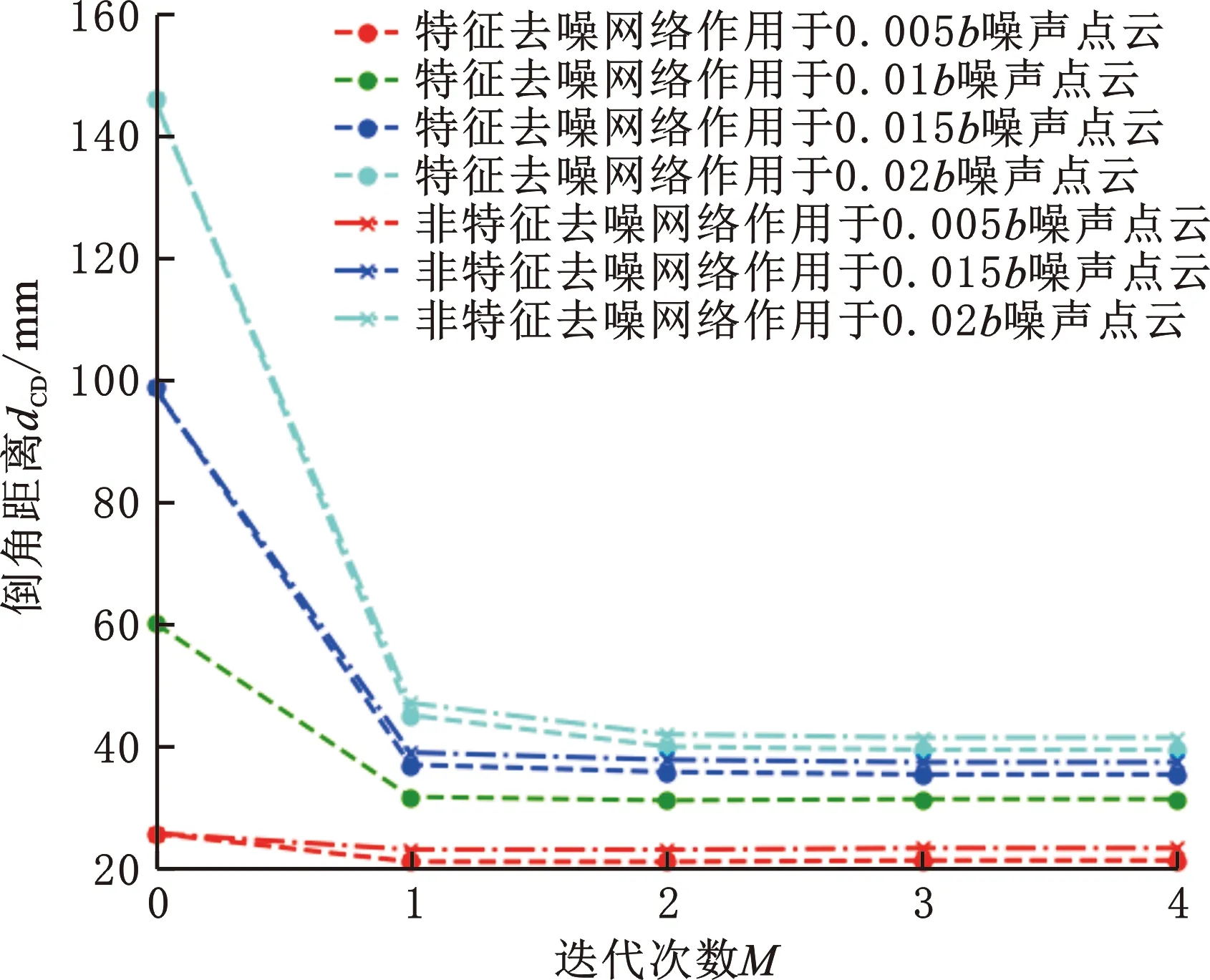
圖16 殘留噪聲與迭代次數關系圖Fig.16 The relationship between residual noise and the number of iterations
噪聲點云經過迭代后,模型會出現收縮現象。參考TAUBIN[28]提出的方法,噪聲patch中心的位置修正向量為
(10)

5 保特征去噪方法的驗證與分析
為驗證保特征去噪方法的有效性和優越性,定義了定量評估準則,并且進行了以下驗證實驗:本文方法與PointCleanNet去噪結果的定性對比、定量對比、訓練時間對比和測試時間對比。定性對比主要觀察幾何特征保護的效果,定量對比可評估兩種方法的去噪能力。
2.1節和2.2節具體說明了本文方法中包含的非特征鄰域編碼器(圖8)和特征鄰域編碼器(圖10)相比PointCleanNet(圖17)的創新。
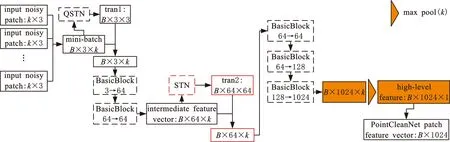
圖17 PointCleanNet的局部鄰域編碼器Fig.17 PointCleanNet local neighborhood encoder

(11)
(12)
(13)

5.1 與PointCleanNet的定性對比
將本文方法與PointCleanNet應用于航空發動機機匣噪聲點云,結果如表3所示。對比去噪前后的點云發現,本文方法相比PointCleanNet有更好的幾何特征保護能力,主要表現在對凸臺的整體形狀保護和細節特征保護,安裝邊薄壁結構的保護,加強筋、凸肩和機匣殼體的尖銳棱邊保護。
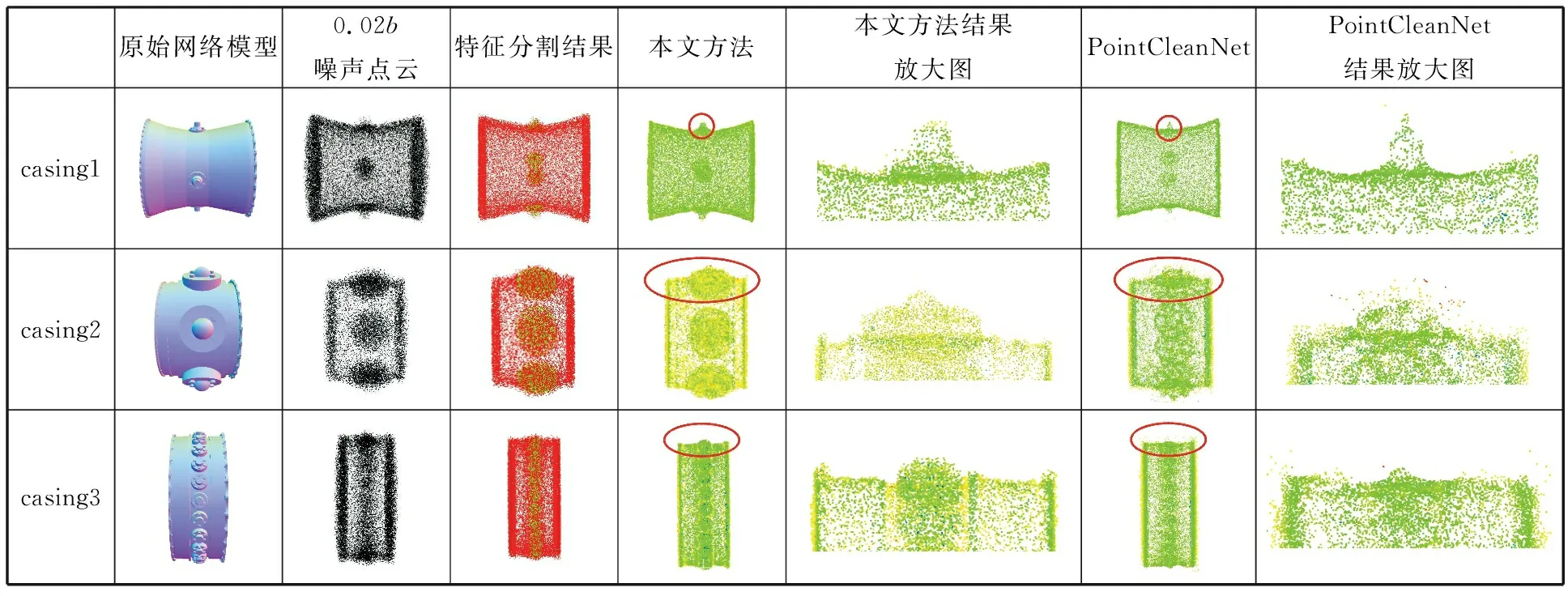
表3 不同方法應用于航空發動機機匣點云去噪結果
casing1的凸臺是圓柱形,本文方法保護了它的整體形狀,而PointCleanNet將圓柱形凸臺破壞成塔形凸臺。
casing2的凸臺所處的圓柱形機匣壁與其他機匣壁存在臺階,形成一種凸肩結構。本文方法在去除噪聲的同時,不僅保護了凸肩的尖銳棱邊和安裝邊的薄壁結構,而且對凸臺中半球形細節特征的保護也非常到位,而PointCleanNet并沒有從噪聲中提取出機匣的整體形狀,而且還將凸臺的右半部分破壞至塌陷,導致螺栓特征的丟失。
casing3的凸臺位于凹陷機匣壁,并且相互之間距離較近。本文方法的結果中凸臺點云相互之間是獨立的,并且去噪后的整體形狀是正確的,除此之外還保護了凸臺兩側機匣殼體的尖銳棱邊和形狀復雜的花形安裝邊薄壁結構,而PointCleanNet幾乎已經將凸臺徹底破壞,只剩余部分不規則凸起。
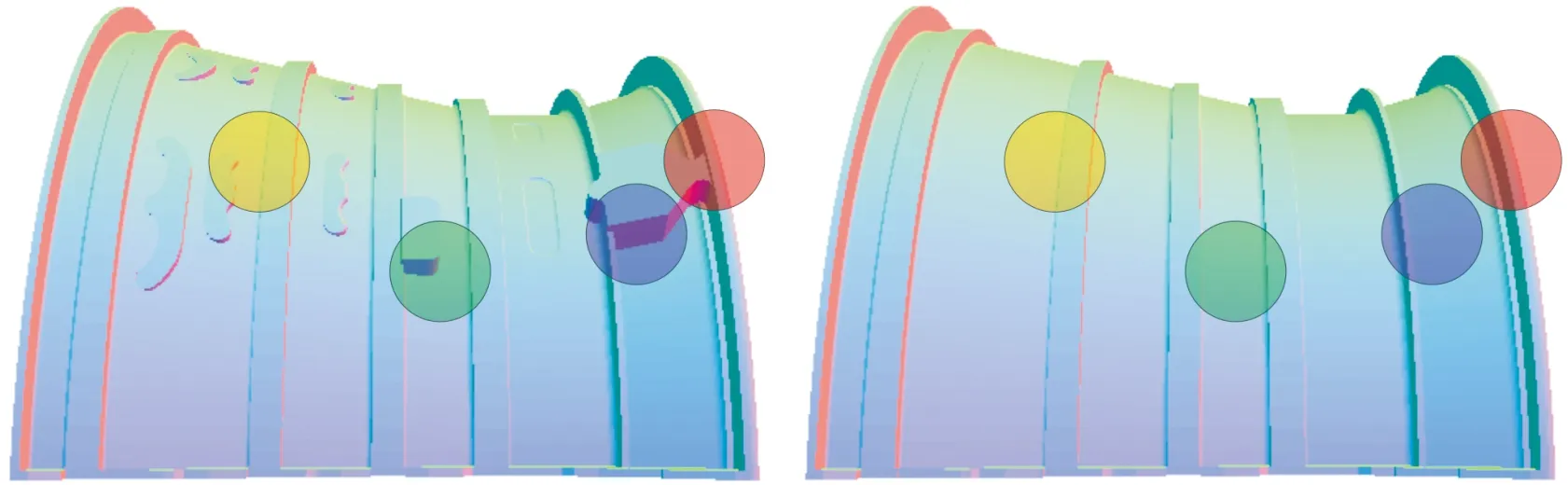
將本文方法與PointCleanNet應用于航空發動機外形噪聲點云,結果如圖18、圖19所示。圖18a發動機由10個機匣模型軸向連接而成,是參考實際發動機的尺寸在UG中建模得到的。圖18b是上述模型的0.005b噪聲點云,0.005b=20.6 mm的噪聲尺度相當于發動機每個點有20 mm左右的位置偏移量,選擇它驗證本文方法的有效性是有說服力的。為了重點觀察機匣與機匣軸向裝配位置處的安裝邊結構和凸臺形狀,選擇對應區域放大(圖19)。
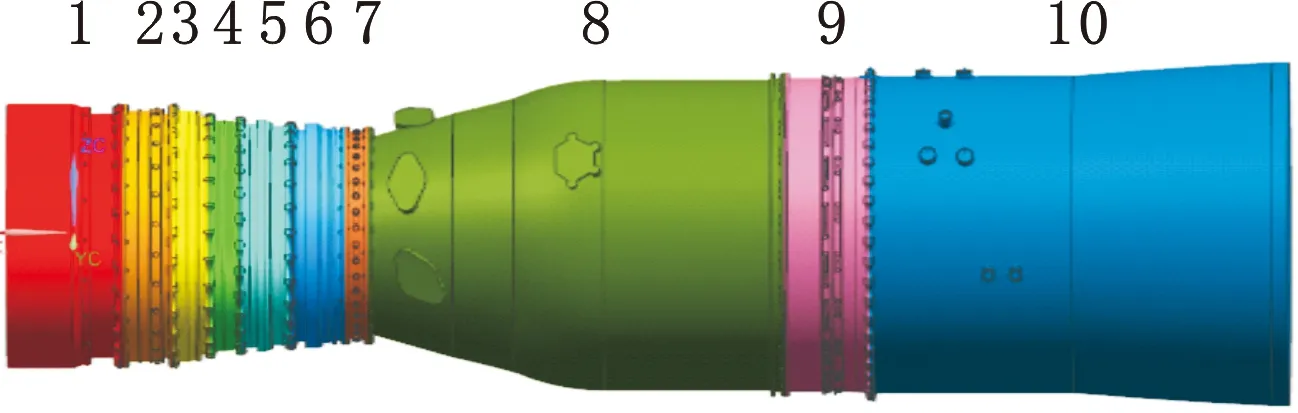
(a) UG建模得到的航空發動機外形幾何模型
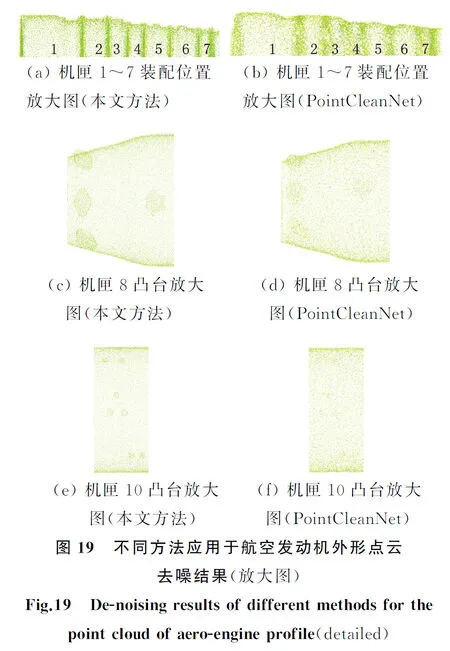
圖19a和圖19b對比說明:本文方法從噪聲數據中恢復出了準確的發動機整體外形,有效保護了機匣與機匣裝配位置處安裝邊的薄壁結構和加強筋的尖銳棱邊;而PointCleanNet的去噪結果在整體形狀變化的位置都是光滑過度的,這并不符合模型的真實形狀。
圖19c和圖19d對比、圖19e和圖19f對比說明,本文方法從噪聲數據中恢復出了機匣8的4個異形凸臺和機匣10的7個圓柱形凸臺,它們的形狀、大小、位置相比PointCleanNet都是清晰準確的,表明本文方法相比PointCleanNet具有更好的幾何特征保護能力。
5.2 與PointCleanNet的定量對比
不同方法作用于各種噪聲尺度的發動機外形點云,去噪效果的定量對比如表4所示,其中PointCleanNet、非特征去噪網絡和特征去噪網絡都只在基礎訓練集上進行了訓練并直接作用于整體點云,本文方法中的非特征去噪網絡與特征去噪網絡還分別在對應訓練集中完成了第二階段的學習。
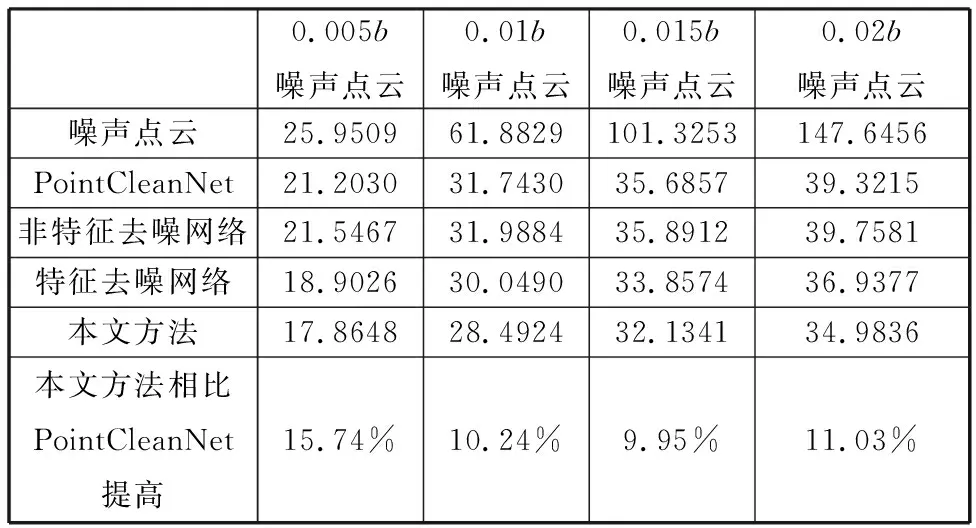
表4 不同方法的去噪效果對比(與干凈點云的CD距離)
非特征去噪網絡與PointCleanNet對比的結果表明,去除掉特征轉換模塊后,去噪效果并不會出現明顯下降;特征去噪網絡相比非特征去噪網絡和PointCleanNet的結果表明,在三種局部鄰域編碼器中,特征鄰域編碼器收集到了最多最準確的局部形狀信息,因此特征去噪網絡對噪聲點位置修正向量的預測也最準確。
本文方法與特征去噪網絡的結果對比表明,去噪效果在大中小各種噪聲尺度上都得到了提高,說明先分割再去噪的保特征思路是正確的、合理的、有效的。
本文方法相比PointCleanNet,在四種噪聲尺度0.02b、0.015b、0.01b、0.05b的去噪效果上分別有15.74%、10.24%、9.95%、11.03%的提高,說明本文方法是先進的。
5.3 與PointCleanNet的訓練時間對比
本文方法和PointCleanNet的訓練時間對比結果如表5所示。硬件條件如下:GPU型號Tesla V100-PCIE-32GB 、GPU數量2、內存32G、CPU線程20。表5中數據是三種網絡在基礎去噪訓練集上采用相同的batchsize(取值64)訓練1個epoch的運行時間。非特征去噪網絡比PointCleanNet快17.9s左右,原因是去除了特征旋轉模塊,不需要在計算損失函數時添加正則項;PointCleanNet比特征去噪網絡快14.6 s左右,原因是特征鄰域編碼器最大池化了最后三層BasicBlock的輸出,采用了更加復雜的信息整合方法。
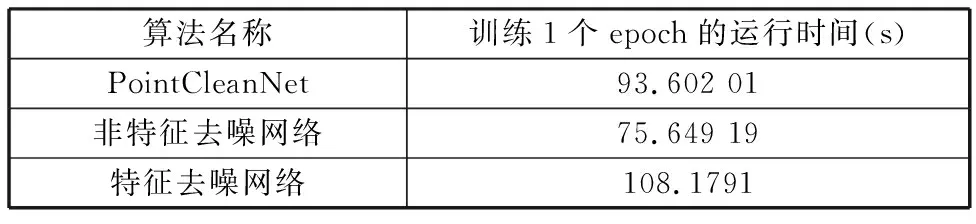
表5 不同網絡的訓練時間對比
5.4 與PointCleanNet的測試時間對比
本文方法和PointCleanNet的測試時間對比結果如表6所示。硬件條件如下:GPU型號NVIDIAGeForce GTX 1050 Ti、GPU數量1、內存4096M、CPU線程12。表6中數據是三種網絡在同一個機匣模型上的測試時間,模型包含的點數為25 952。PointCleanNet比特征去噪網絡快5.8 s左右,比非特征去噪網絡慢17.9 s,說明非特征去噪網絡的復雜度是最低的、PointCleanNet次之,最復雜的是特征去噪網絡,但依舊在可接受范圍內。
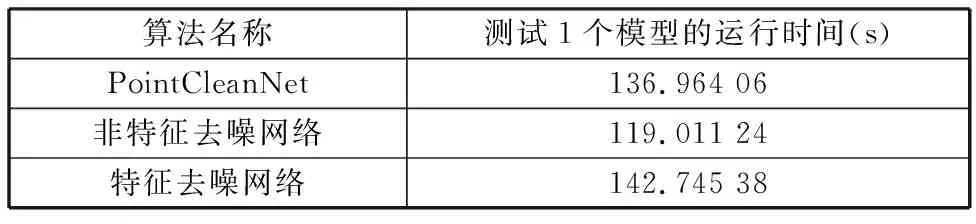
表6 不同網絡的測試時間對比
6 結論
為了在去除噪聲的同時不模糊或破壞掉發動機復雜的外形幾何特征,提出了一種基于深度學習的點云保特征去噪方法。航空發動機外形噪聲點云被分割成特征數據與非特征數據之后,根據每種數據的形狀特點,分別設計了特征去噪網絡和非特征去噪網絡,用來預測噪聲點的位置修正向量,并將其投影回模型真實的底層表面上。相比現有的學習基方法,去噪效果在大中小各種噪聲尺度上都得到了全面的提高,本文方法也具有更好的幾何特征保護能力,主要表現在對凸臺的整體形狀保護和細節特征保護,安裝邊薄壁結構的保護,加強筋、凸肩和機匣壁的尖銳棱邊保護,可以為后續數據處理方法提供高質量點云,有利于重建出準確的航空發動機外形幾何模型,為飛機與發動機裝配協調設計提供指導。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車與新動力(2015年1期)2015-02-27 12:11:01
河南科技(2014年23期)2014-02-27 14:19:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
