機器視覺測量技術在既有公路隧道拱頂沉降監測中的應用
2021-12-17 08:35:38陳必港
福建交通科技 2021年7期
■陳必港
(福建省交通科研院有限公司,福州 350004)
隧道拱頂沉降監測通常采用人工監測的方法,如全站儀法、水準儀法。 但對于已開放運營的既有隧道,傳統的人工監測方法已經不能滿足實際監測的任務要求。 一是因為監測作業過程中需要道路布控,極大地增加了監測成本,且現實條件不允許如此頻繁的占道作業;二是隧道中車流量大、車速快,給作業人員人身安全造成了重大隱患;三是每次需要作業人員親臨現場架設儀器、測量,費時費力;四是受天氣影響、人為等因素,監測數據時常會存在不連續的現象。 隨著科學技術的發展,自動化監測技術應運而生替代了人工監測。 目前主要有近景攝像測量系統、光纖監測系統、多通道無線遙測系統、全站儀自動測量系統、靜力水準系統、巴塞特結構收斂系統等[1]。 本文主要探討近景攝像測量系統類別中的機器視覺測量技術。
機器視覺測量技術,其原理主要是通過機器視覺產品將被攝取目標轉換成圖像信號,并經圖像處理系統轉換得到數字化信號,用以判別被攝取目標體特征。 肖和華等[2]提出一種基于光筆式機器視覺測量系統的非接觸式沉降監測方法,并引入到路基沉降測量中。 張劼等[3]基于機器視覺理論,對橋梁形變在線監測技術進行了研究與探討,并運用相應的測試系統,對拱肋與橋塔偏位、橋梁斜拉索振動位移監測等橋梁較為關鍵的部位的位移情況進行了測量。 盧泉[4]基于機器視覺設計了一套高性能的特殊管道靜態參數測量系統,研究了特殊管道測量環境下視覺測量分系統的優化設計、靶標圖像的預處理、基于圖像測量的高精度定位和靜態參數測量的實現等關鍵技術,并提出了相應的解決方案。 向啟安[5]闡述了基于機器視覺的工程安全監測解決方案,并結合貴州六盤水某地質災害監測、浙江申嘉湖邊坡監測項目分析該方案在邊坡和滑坡災害監測預警中的實際應用。 綜上所述,現有研究成果鮮有機器視覺測量技術在既有公路隧道拱頂沉降監測中的應用。 因此,本文在闡述機器視覺測量技術原理的基礎上,探討了該技術在既有公路隧道拱頂沉降監測中的應用。
1 機器視覺測量原理
工業相機作為機器視覺的關鍵組件[4],機器視覺的基本模型就是用工業相機通過小孔成像原理得出的[2],即測量時將空間的某一點坐標成像在相機圖像坐標系中,再用圖像坐標系中已知坐標的像點來反推空間的該點坐標,具體過程如下:假設空間一點A 的坐標為(X,Y,Z),其在相機圖像坐標系中的坐標為(x,y,z),那么從空間坐標系到圖像坐標系,有:
式中,R 是3×3 三階旋轉矩陣,T 是三階的平移向量,兩者皆為相機參數,決定了空間絕對坐標系到相機圖像坐標系的坐標變換關系,具有唯一性。
由小孔成像模型可知,若不計誤差,則有:

式中f 為相機焦距。
同時,圖像平面坐標系和相機坐標系具有如下關系:

式中,u0、v0代表像點中線坐標;Nx、Ny代表單位距離內像素點的數量。 將式(2~5)代入式(1),則圖像坐標與空間坐標的關系式可以表示為:
式中的Z 為物像距離, 在測量系中是已知的,因此通過式(6)即可測得空間點A 的坐標。
那么在T0、T+1 時刻,A 點的位移變化量為:
式中ΔX、ΔY、ΔZ分別為A 點由T0時刻至T+1時刻在X、Y、Z 方向的位移量。
在上述理論的基礎上,采集的信號通過光與電荷信號的轉換以及模數的轉換,并經過數據傳輸呈現給用戶,測量原理詳見圖1。

圖1 機器視覺測量原理
2 工程應用
2.1 工程概況
某新建高鐵在DK237+524~+574 里程處上跨既有公路隧道,高鐵路肩頂部距離隧道拱部襯砌外緣最小凈距約2 m, 公路隧道原結構設計未考慮上跨鐵路荷載和影響,鐵路施工及運營期間鐵路及公路安全均不能保證, 因此需對交叉影響段公路隧道襯砌結構采取“置換加固”方案處理,即拆除公路隧道交叉影響段并對公路隧道結構進行重建加強。 為保證隧道結構安全,置換加固過程中及置換加固后一段時間都需要進行拱頂沉降監測。 本文研究的是機器視覺技術在置換加固后的監測過程。
2.2 監測方案
采用TH-ISM-ST 型機器視覺測量儀, 配合TH-DQG-BM01 數據箱和90×90 標準靶標,在新建高鐵與既有公路隧道交叉影響段左洞拱頂處共布設3 個測點, 各測點所在位置分別為:1# 監測點為ZK19+275;2# 監測點為ZK19+290;3# 監測點為ZK19+300。 測點布設如圖2 所示。
所有監測設備每1 h 采集1 次數據,每天24 h不間斷采集。 為減少過往車輛振動對測點數據產生的影響及減小外界溫度的影響,在進行分析時取每日0 點左右的數據為當日的分析數據,其余時間點數據為突發情況時的參考數據。 監測方案具體內容如表1 所示。
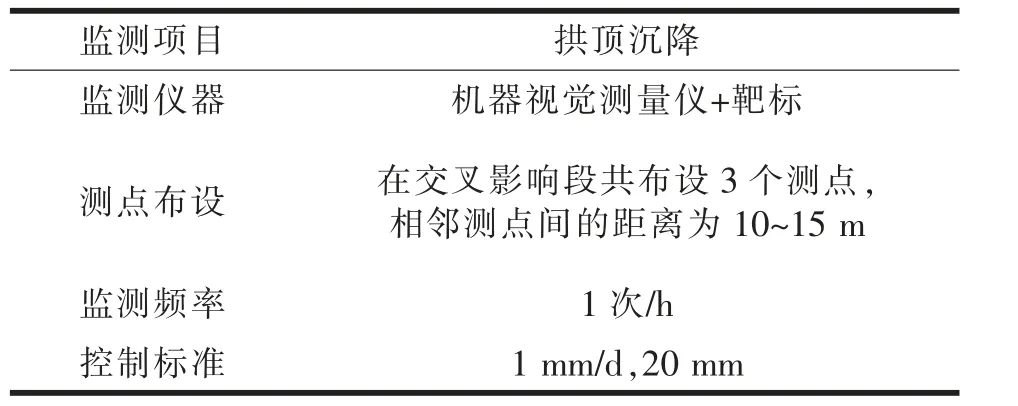
表1 拱頂沉降監測方案
儀器安裝調試完畢,后期工作均通過云平臺實現,該平臺具有數據查看、存儲與分析、結構物狀態預警、報警、報表自動化生成、人員與設備管理等功能,其工作界面如圖3 所示。
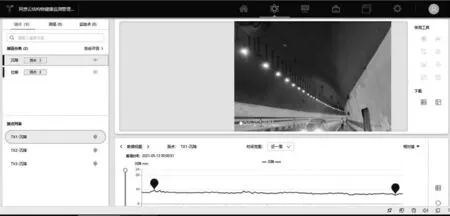
圖3 云平臺工作界面
2.3 監測結果精度分析
監測時間段為2021 年5 月20 日-6 月28 日。監測期間內,對每個監測點每日0:00-23:59 的測量值分別計算中誤差后再計算其算數平均值。
經計算,各測點儀器觀測值中誤差均值統計結果如表2 所示。 由表2 中可知,各測點中誤差均值均小于±0.30 mm, 能夠滿足實際測量精度要求,也進一步證明機器視覺測量技術在既有公路隧道拱頂沉降監測中應用的可行性。

表2 各測點中誤差均值統計
2.4 監測結果應用分析
從圖4 可以看出,3 個監測點波動值最大為5.60 mm, 最小為3.20 mm,3 個監測點監測數據總體變化趨勢平穩,無明顯波動跡象,且后續有回落的跡象,說明隧道結構無明顯變形。

圖4 各測點拱頂沉降累計值變化曲線
同時,云平臺自帶預警、報警功能,當監測值達到或超過預警、報警閾值時,云平臺會自動向用戶發送警示信息。本次以拱頂沉降日變化量1 mm/d 作為報警閾值,以0.8 倍的日變化量為預警閾值。 監測期間,未收到警示信息,進一步說明監測結果正常。
3 機器視覺在既有公路隧道中的應用較之于其他工程的難點問題
(1)通視不佳。 一是隧道為近封閉空間,在里面作業通視本身不如路基、橋梁等工程良好。 二是隧道經常會存在變曲線的情況,這就導致每臺儀器覆蓋的監測點數有限,也給儀器安裝調試帶來了很大的困難。
(2)儀器受外界干擾因素多。 既有公路隧道內,車流量大、尾氣多、熱氣重,這些因素都有可能會影響儀器的測量精度。
(3)儀器維護、管理難度大。 在儀器使用過程中,隨時可能出現數據傳輸信號中斷、數據不穩定的情況,需要監測人員進入隧道內檢查。 為保障人員人身安全,需要協調各方對道路進行布控,從而增加了維護、管理難度。
4 結語
基于機器視覺測量技術及移動通訊傳輸技術,可實現自動化監測。 本文將機器視覺測量技術應用于既有公路隧道拱頂沉降監測中,取得了良好的應用效果。 但其中仍存在一定的不足之處,在今后的工作中需進一步完善:(1)監測工作是在隧道置換加固后開展的,隧道已恢復交通,無法進行人工監測,導致機器視覺測量結果未能與人工監測結果相比較,監測結果無法保證;(2)本次監測僅在新建高鐵與既有公路隧道交叉影響段(變形區)布設測點,未考慮在遠離交叉影響段(非變形區)布設測點,導致監測結果無對比性;(3)機器視覺測量技術利用了光在空氣中的傳播。 隧道內車流量大、尾氣多、熱氣重,會導致大氣的非均勻性分布。 當光在這樣的環境中傳播時,其傳播方向會偏離直線傳播,本研究未能從技術層面深層次地分析這方面對測量精度的影響。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:40
人民交通(2019年16期)2019-12-20 07:04:10
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公路(2017年12期)2017-02-06 03:07:33
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
海峽姐妹(2016年2期)2016-02-27 15:15:46
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:35
