尖軌密貼爬行測(cè)量方法及系統(tǒng)
2021-12-17 15:36:04翟文革鄭培珍江海川任同群
計(jì)測(cè)技術(shù) 2021年5期
翟文革,鄭培珍,江海川,任同群
(1.西安鐵路信號(hào)有限責(zé)任公司,陜西 西安710100;2.大連理工大學(xué) 微納米技術(shù)及系統(tǒng)遼寧省重點(diǎn)實(shí)驗(yàn)室,遼寧大連116024)
0 引言
道岔是機(jī)車(chē)從一股軌道轉(zhuǎn)換到另一股軌道的線路設(shè)備,是軌道交通線路中的重要組成部分,其構(gòu)造復(fù)雜、狀態(tài)多變、病害繁多,是高速鐵路線路的薄弱環(huán)節(jié)[1-2]。然而,在道岔運(yùn)行過(guò)程中,尖軌作為主要的被操作對(duì)象,受列車(chē)行駛過(guò)程中的動(dòng)力作用以及溫差的影響,其相對(duì)于基本軌的橫向和縱向間隙會(huì)時(shí)常發(fā)生變化。一旦道岔間隙的大小超過(guò)標(biāo)準(zhǔn),不僅會(huì)限制列車(chē)過(guò)岔速度、加劇列車(chē)振動(dòng)、降低列車(chē)通過(guò)道岔時(shí)的舒適性,甚至還會(huì)造成線路封閉,導(dǎo)致列車(chē)行駛方向錯(cuò)誤或列車(chē)脫軌,危及列車(chē)運(yùn)營(yíng)安全[3-4]。因此及時(shí)識(shí)別尖軌病害、準(zhǔn)確獲得尖軌密貼間隙和爬行量是線路故障檢測(cè)的重中之重。
轉(zhuǎn)轍機(jī)作為道岔控制系統(tǒng)的執(zhí)行機(jī)構(gòu),負(fù)責(zé)轉(zhuǎn)換并鎖閉道岔尖軌,也可表示和監(jiān)督道岔尖軌的位置與密貼程度[5]。根據(jù)轉(zhuǎn)轍機(jī)缺口的結(jié)構(gòu)和工作原理,張含龍等人[6]通過(guò)在轉(zhuǎn)轍機(jī)表示桿部件上加裝相應(yīng)接觸式導(dǎo)電觸頭以實(shí)現(xiàn)對(duì)缺口大小的超限報(bào)警。該方法需要對(duì)缺口表示桿加裝檢測(cè)裝置,誤報(bào)率相對(duì)較高,且無(wú)法及時(shí)發(fā)現(xiàn)尖軌形變等問(wèn)題產(chǎn)生的偏移量。在高速鐵路中檢測(cè)尖軌爬行量應(yīng)用最普遍的方法是人工定期讀取軌旁標(biāo)尺數(shù)值,這種方式很難實(shí)現(xiàn)實(shí)時(shí)監(jiān)測(cè)及報(bào)警,且由于人為不確定因素的影響,易出現(xiàn)較大誤差,并耗費(fèi)大量人力和時(shí)間[7]。
為了高效、準(zhǔn)確且及時(shí)地獲取尖軌密貼間隙和爬行量,視覺(jué)測(cè)量技術(shù)被應(yīng)用于尖軌的密貼和爬行檢測(cè)中。合安高鐵股份有限公司研發(fā)了基于圖像的道岔岔尖密貼監(jiān)測(cè)系統(tǒng),通過(guò)在軌道兩邊設(shè)置高清圖像采集設(shè)備,實(shí)時(shí)監(jiān)測(cè)道岔尖軌的密貼狀態(tài)[8]。北京交通大學(xué)劉文才利用布于尖軌側(cè)面的攝像機(jī),提出了全天候現(xiàn)場(chǎng)采集尖軌伸縮位移圖像的自動(dòng)判讀方法[9]。但由于現(xiàn)場(chǎng)采集的圖像易受遮擋、部件油污、低光照、環(huán)境振動(dòng)等各種降質(zhì)因素影響,造成特征點(diǎn)檢測(cè)困難,嚴(yán)重影響測(cè)量精度[10-11]。除此之外還出現(xiàn)了基于光纖光柵技術(shù)[12-13]、激光技術(shù)[14-15]的尖軌檢測(cè)設(shè)備,但由于易受環(huán)境、工況影響,增加了密封防護(hù)難度。在實(shí)際工況中,尖軌在密貼方向的最大位移約為200 mm,爬行方向的最大位移約為100 mm,且為兩方向的聯(lián)動(dòng)。對(duì)道岔的安全運(yùn)營(yíng)而言,兩方向?qū)嶋H位移量的連續(xù)實(shí)時(shí)測(cè)量更有意義。此時(shí),直接采用兩直線位移傳感器組合測(cè)量的方案,將不可避免地帶來(lái)安裝干涉的問(wèn)題,且軌旁安裝方式也必將導(dǎo)致測(cè)量某一方向位移時(shí)會(huì)產(chǎn)生較大的阿貝誤差。
綜上所述,道岔工作環(huán)境復(fù)雜、干擾因素多,對(duì)尖軌檢測(cè)設(shè)備的防護(hù)要求高。若同時(shí)檢測(cè)尖軌密貼間隙和爬行量勢(shì)必會(huì)給測(cè)量系統(tǒng)帶來(lái)安裝和防護(hù)困難等問(wèn)題。基于上述分析,本文開(kāi)發(fā)了一種便于傳感單元安裝和防護(hù)的尖軌密貼爬行測(cè)量系統(tǒng),該系統(tǒng)能夠在惡劣環(huán)境條件下長(zhǎng)時(shí)間穩(wěn)定地檢測(cè)尖軌密貼與爬行位移量。通過(guò)開(kāi)展相關(guān)測(cè)量實(shí)驗(yàn),對(duì)該系統(tǒng)的準(zhǔn)確性和可靠性進(jìn)行驗(yàn)證,為提升高鐵建設(shè)能力提供技術(shù)支撐。
1 測(cè)量方案及原理
1.1 測(cè)量方案
本文提出了一種利用動(dòng)作引導(dǎo)桿引入尖軌密貼和爬行位移變化的測(cè)量方案,如圖1所示,該系統(tǒng)利用動(dòng)作引導(dǎo)桿與尖軌鉸接,將尖軌的正交運(yùn)動(dòng)轉(zhuǎn)變?yōu)閯?dòng)作引導(dǎo)桿的伸縮和旋轉(zhuǎn)運(yùn)動(dòng),由系統(tǒng)內(nèi)的核心傳感元件檢測(cè)動(dòng)作引導(dǎo)桿的線位移和角位移增量,并代入解算模型求解尖軌密貼間隙和爬行量。該方案使系統(tǒng)核心元件全部置于保護(hù)箱體內(nèi),僅通過(guò)箱體端口引出動(dòng)作引導(dǎo)桿,有效減小了系統(tǒng)防護(hù)面積,能夠在惡劣環(huán)境下工作。
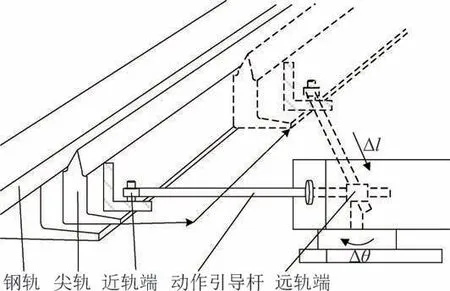
圖1 測(cè)量方案示意圖Fig.1 Schematic diagram of measurement scheme
1.2 測(cè)量原理
1.2.1 系統(tǒng)實(shí)現(xiàn)
依照測(cè)量方案,設(shè)計(jì)了位移、角度測(cè)量和數(shù)據(jù)采集處理三個(gè)主要單元。如圖2所示,磁致伸縮位移傳感器、動(dòng)作引導(dǎo)桿以及直線軸承共同構(gòu)成位移測(cè)量單元。直線軸承與動(dòng)作引導(dǎo)桿配合,起到了很好的導(dǎo)向作用,有效地保持了動(dòng)作引導(dǎo)桿作用的準(zhǔn)確性。選用CARLEN生產(chǎn)的CPM3/200S001-1B02型磁致伸縮位移傳感器,其測(cè)量行程為200 mm,分辨力為1 μm,直線度小于0.01%。磁致伸縮位移傳感器通過(guò)磁塊與動(dòng)作引導(dǎo)桿連接,用于獲取線位移增量值。角度測(cè)量單元的旋轉(zhuǎn)部分由芯軸、旋轉(zhuǎn)軸承及軸承底座等軸系零件組成。選用禹衡光學(xué)生產(chǎn)的JKW-6-H35-23PFG05RS422-A-1m型角度編碼器,其角分辨力為0.15″,準(zhǔn)確度為±15″,角度編碼器與芯軸配合,用于獲取角度增量值。動(dòng)作引導(dǎo)桿末端的接頭連件通過(guò)銷(xiāo)軸與尖軌端鉸接,一定程度上限制了動(dòng)作引導(dǎo)桿繞自身軸線的旋轉(zhuǎn)自由度,且銷(xiāo)軸連接的軸孔間隙可能使動(dòng)作引導(dǎo)桿發(fā)生微小轉(zhuǎn)動(dòng),但并不影響磁致伸縮位移傳感器的正常使用。
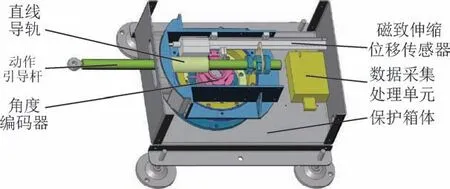
圖2 測(cè)量系統(tǒng)結(jié)構(gòu)圖Fig.2 Structure diagram of measurement system
1.2.2 解算模型
測(cè)量系統(tǒng)得到動(dòng)作引導(dǎo)桿的線位移增量Δli和角位移增量Δθi。如圖3所示,設(shè)遠(yuǎn)軌端回轉(zhuǎn)中心點(diǎn)O到近軌端鉸接點(diǎn)A的初始距離為l0,其連線(動(dòng)作引導(dǎo)桿)繞回轉(zhuǎn)中心O順時(shí)針旋轉(zhuǎn)時(shí)Δθi>0,此時(shí)線位移增量Δli和角位移增量Δθi共有四種組合形式,每種組合下尖軌運(yùn)動(dòng)范圍不同。其中,s為爬行位移,t為密貼位移。現(xiàn)以Δθi>0,Δli<0為例,給出具體解算模型。
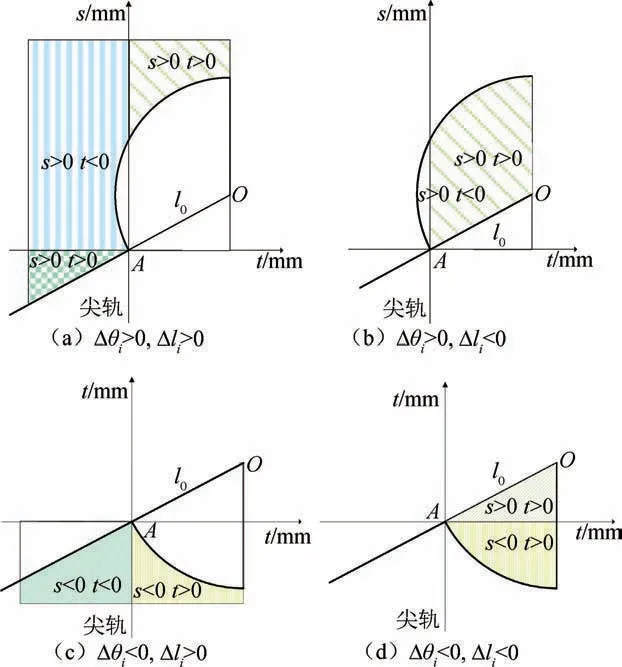
圖3 Δθi和Δli四種組合下尖軌運(yùn)動(dòng)區(qū)域分析Fig.3 Analysis of the motion region of switch rail under four combinations ofΔθi andΔli
由圖3(b)可知,當(dāng)Δθi>0,Δli<0時(shí),尖軌可能移動(dòng)至第一象限或第二象限,為確定尖軌移動(dòng)后的實(shí)際位置,可進(jìn)行以下判斷。
若l0cosβ>(l0+Δli)cos(Δθi-β),則尖軌運(yùn)動(dòng)至第一象限,如圖4所示。
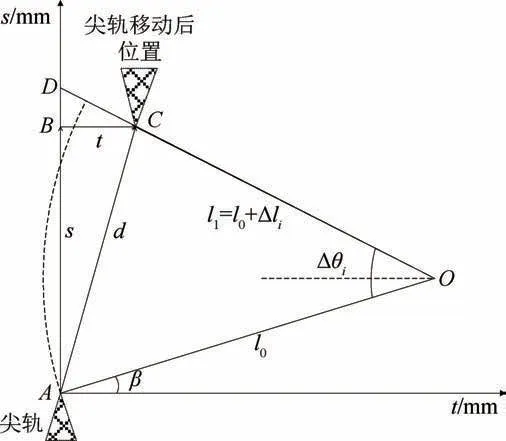
圖4 第一象限解算模型Fig.4 Solution model in first quadrant
此時(shí)可得
其中,∠ACD需分情況計(jì)算。
當(dāng)l0+Δli<l0cosΔθi,∠ACO為鈍角,∠ACD為銳角,則
當(dāng)l0+Δli>l0cosΔθi,∠ACO為銳角,∠ACD為鈍角,則
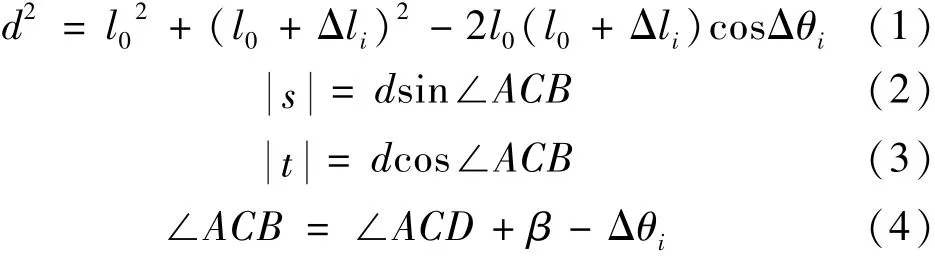
若l0cosβ<(l0+Δli)cos(Δθi-β),則尖軌運(yùn)動(dòng)至第二象限,如圖5所示。
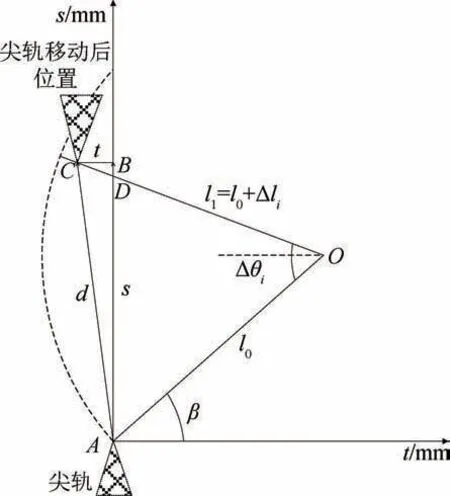
圖5 第二象限解算模型Fig.5 Solution model in second quadrant
此時(shí)式(1)~式(3)依然成立,∠ACB計(jì)算公式為

其中,∠ACD同樣需要分情況計(jì)算。
當(dāng)l0+Δli>l0cosΔθi時(shí),∠ACD為銳角,則
當(dāng)l0+Δli<l0cosΔθi時(shí),∠ACD為鈍角,則
圖3 中其他三組情況下的解算模型,可參照上述公式構(gòu)建,此處不再贅述。
1.2.3 標(biāo)定模型
在解算過(guò)程中,初始位置參數(shù)l0(初始桿長(zhǎng))和β(初始安裝偏轉(zhuǎn)角度)是未知的,需通過(guò)標(biāo)定獲得。
首先,由標(biāo)定平臺(tái)給定一組已知的密貼間隙t和爬行量s數(shù)值。由圖4可得

其中,∠CAO也需分情況計(jì)算而得。
但在實(shí)際安裝中,系統(tǒng)所采用的連接件可能使圖4模型中的A點(diǎn)不在動(dòng)作引導(dǎo)桿軸線上,而是存在偏移量a,如圖6虛線所示,此時(shí)a,l0′和β為所需標(biāo)定的初始位置參數(shù)。
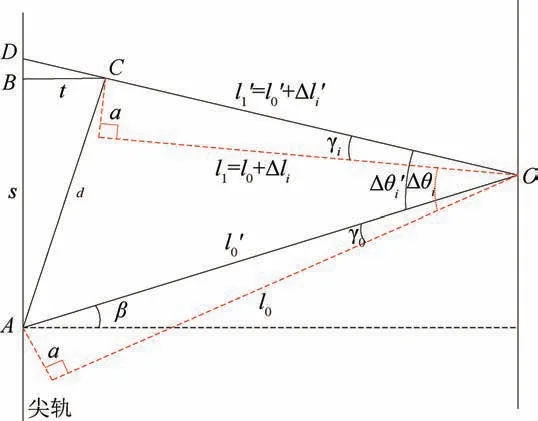
圖6 標(biāo)定模型Fig.6 Calibration model
由圖6可知

β仍可由式(6)、式(7)計(jì)算。但因存在偏移量a,式(7)中的變量l0,Δli,Δθi變?yōu)閳D6模型中的l0′,Δli′,Δθi′,其中

此時(shí)根據(jù)余弦定理可構(gòu)建關(guān)于a,l0的二元方程f(a,l0)=0,即

則
每給定一組密貼和爬行位移值,則可提供一個(gè)如公式(13)所示的函數(shù)f(a,l0)=0。提供多組密貼和爬行位移值,構(gòu)建超定方程組,給定迭代初值a0及為連接件設(shè)計(jì)尺寸為初始安裝狀態(tài)下粗測(cè)的動(dòng)作引導(dǎo)桿長(zhǎng)度),迭代求解該方程組得到(a,l0),再代入式(6)~式(12)計(jì)算l0′和β的值。
2 數(shù)據(jù)采集與發(fā)送
2.1 電路總體框圖
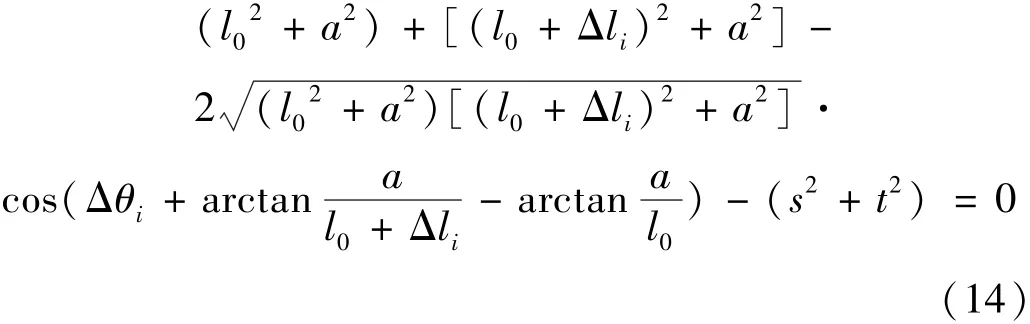
系統(tǒng)數(shù)據(jù)采集處理單元選用STM32F103CBT6芯片作為微控制單元,內(nèi)部集成防雷擊浪涌的電源模塊、溫度檢測(cè)模塊、USB程序下載模塊以及J-LINK仿真器接口,配有RS422,SSI,CAN以及無(wú)線WiFi等多種通信接口。如圖7所示,數(shù)據(jù)采集處理單元分別通過(guò)RS422,SSI傳輸協(xié)議獲取角度編碼器和磁致伸縮位移傳感器數(shù)據(jù),利用溫度檢測(cè)模塊獲取當(dāng)前溫度值以補(bǔ)償動(dòng)作引導(dǎo)桿的變形。上述數(shù)據(jù)經(jīng)分析處理后通過(guò)CAN通信方式上傳給上位機(jī),在上位機(jī)監(jiān)視程序中顯示密貼間隙和爬行量數(shù)值及曲線圖,同時(shí)也可采用WiFi無(wú)線傳輸方式發(fā)送至遠(yuǎn)端。
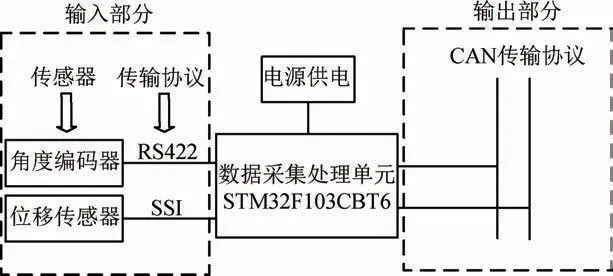
圖7 電路總體框圖Fig.7 Overall block diagram of circuit
2.2 供電電路
如圖8所示,接線端接入220 V交流電后,經(jīng)過(guò)三個(gè)用于浪涌防護(hù)的TVS管和一個(gè)保險(xiǎn)絲后接入濾波器FC-LXID,濾波器能夠有效防止電網(wǎng)雜波干擾本電路。濾波器輸出端接入AC轉(zhuǎn)DC電壓轉(zhuǎn)換模塊LHE25-20B,降壓后雙向TVS管吸收開(kāi)關(guān)電壓尖峰,最終輸出24 V直流電壓。一部分直流電壓經(jīng)過(guò)濾波電路用于向磁致伸縮位移傳感器供電,另一部分直流電壓經(jīng)過(guò)兩個(gè)降壓模塊后分別輸出5 V和3.3 V電壓,用于向后續(xù)電路供電。

圖8 供電電路圖Fig.8 Power supply circuit diagram
2.3 數(shù)據(jù)采集與發(fā)送電路
系統(tǒng)采用角度編碼器和磁致伸縮位移傳感器采集動(dòng)作引導(dǎo)桿的角位移和線位移,數(shù)據(jù)采集處理單元分別通過(guò)RS422、SSI傳輸協(xié)議與角度編碼器和磁致伸縮位移傳感器通訊。如圖9(a),圖(b)所示,角位移和線位移采集電路均使用MAX490ESA芯片,經(jīng)過(guò)電平轉(zhuǎn)換電路實(shí)現(xiàn)與微控制單元通訊。數(shù)據(jù)采集處理單元獲取的數(shù)據(jù)可通過(guò)CAN總線或無(wú)線WiFi傳輸給用戶(hù)。如圖9(c)所示,微控制單元引出CAN接收和發(fā)送引腳,經(jīng)過(guò)光耦合器6N137接入通用CAN收發(fā)器PCA82C250以收發(fā)信號(hào)。無(wú)線WiFi電路采用USRWIFI232-A2模塊,可實(shí)現(xiàn)串口到WiFi數(shù)據(jù)包的雙向透明傳發(fā),從而實(shí)現(xiàn)物聯(lián)網(wǎng)的控制與管理。
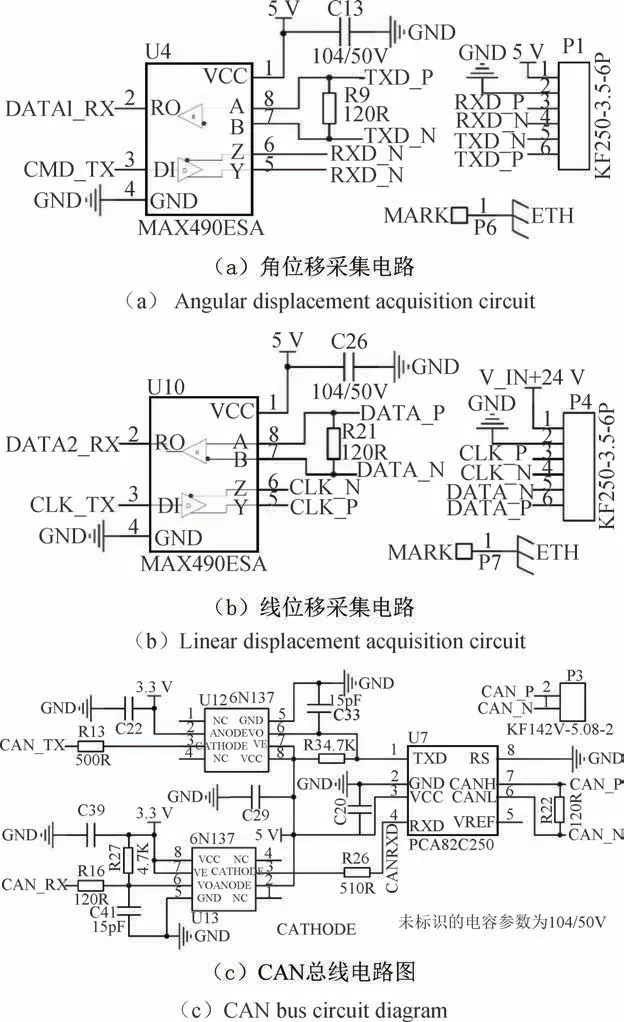
圖9 數(shù)據(jù)采集與發(fā)送電路Fig.9 Data acquisition and transmission circuit
2.4 測(cè)量實(shí)驗(yàn)
尖軌密貼爬行測(cè)量系統(tǒng)實(shí)物圖如圖10所示,在精度實(shí)驗(yàn)中,系統(tǒng)采用正交精密位移滑臺(tái)模擬尖軌密貼、爬行動(dòng)作,利用光柵尺測(cè)量滑臺(tái)準(zhǔn)確位移,準(zhǔn)確度為±3 μm,在上位機(jī)監(jiān)控界面上顯示系統(tǒng)測(cè)量值。首先,給定多組爬行與密貼量(si,ti),參照1.2.3節(jié)標(biāo)定模型進(jìn)行系統(tǒng)標(biāo)定。然后滑臺(tái)從(10,10)位置處開(kāi)始測(cè)量,滑臺(tái)沿兩個(gè)方向每次各向前移動(dòng)10 mm,共測(cè)量10次,實(shí)驗(yàn)數(shù)據(jù)如表1所示。

圖10 尖軌密貼爬行測(cè)量系統(tǒng)實(shí)物圖Fig.10 Picture of measurement system for closing and creeping of switch rail
在表1精度實(shí)驗(yàn)數(shù)據(jù)中,密貼誤差極值為0.162 mm,爬行誤差極值為0.187 mm,均在±0.2 mm范圍以?xún)?nèi),滿(mǎn)足尖軌測(cè)量設(shè)備的測(cè)量精度要求,可實(shí)現(xiàn)精確測(cè)量功能。
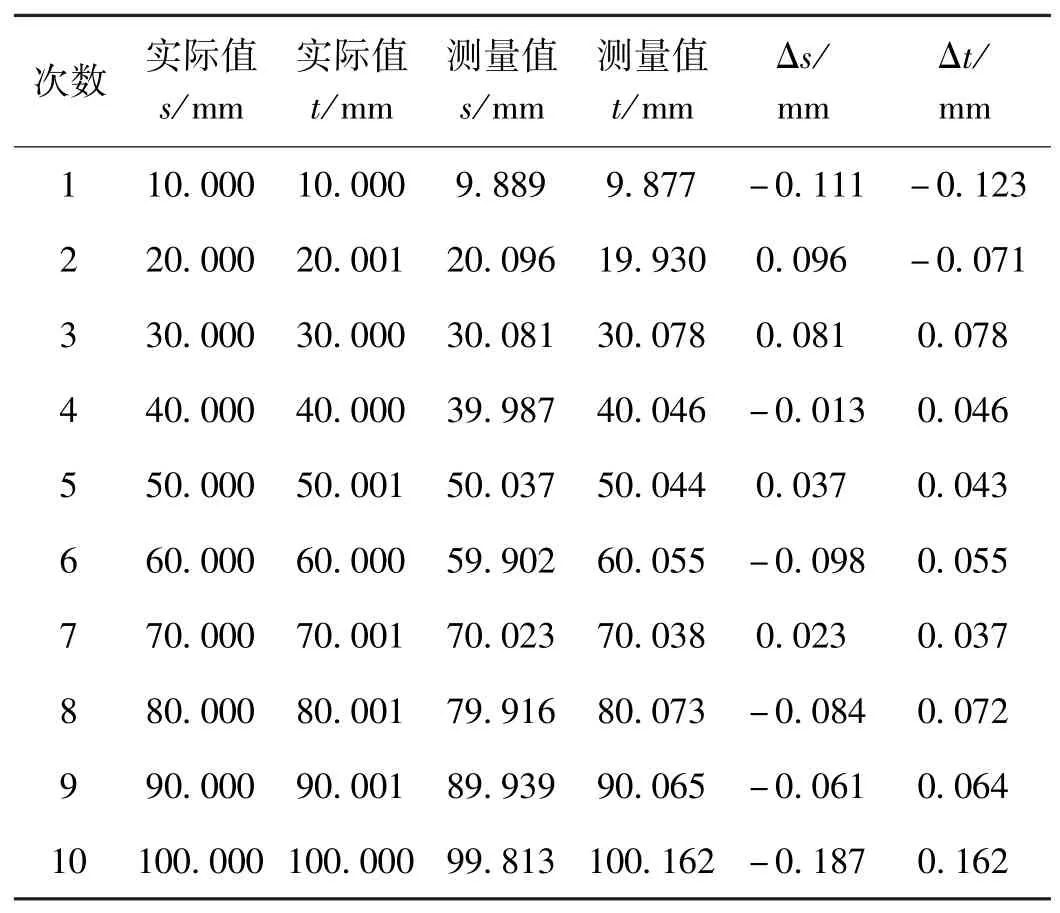
表1 精度實(shí)驗(yàn)數(shù)據(jù)Tab.1 Data from precision experiments
3 結(jié)論
提出了一種綜合檢測(cè)尖軌密貼與爬行位移的方法,并研制了相應(yīng)系統(tǒng),建立了求解密貼間隙和爬行量的解算模型,給出了標(biāo)定系統(tǒng)初始位置參數(shù)的標(biāo)定方法,設(shè)計(jì)了基于STM32F103CBT6主控芯片的數(shù)據(jù)采集與發(fā)送電路。對(duì)該系統(tǒng)開(kāi)展精度實(shí)驗(yàn),結(jié)果表明密貼和爬行測(cè)量誤差均小于0.2 mm,滿(mǎn)足尖軌測(cè)量的精度要求,能夠可靠地完成尖軌密貼爬行測(cè)量工作。該系統(tǒng)為保障鐵路的安全運(yùn)營(yíng)提供了準(zhǔn)確、可靠的技術(shù)手段,為促進(jìn)高鐵建設(shè)能力的提升提供了有力支撐,具有重要技術(shù)借鑒意義和工程應(yīng)用價(jià)值。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12