一種五電平ANPC變換器的調制技術研究
2021-12-20 07:52:42耿后來徐清清
通信電源技術 2021年12期
耿后來,李 星,曹 偉,徐清清,李 順
(陽光電源股份有限公司,安徽 合肥 230088)
0 引 言
多電平變換器能夠實現更高電壓等級和更大容量,且可以能降低系統諧波,功率器件所承受的電壓應力小,相對能用低壓開關管降低開關損耗等優點,在交流調速、光伏發電以及風力發電等系統中得到廣泛應用。多電平逆變器的拓撲結構主要包括H橋級聯拓撲、中點鉗位拓撲以及飛跨電容拓撲。其中H橋級聯型多電平變換器所用的功率器件較多,整機綜合成本高,傳統二極管箝位式變換器存在母線電容電壓難以平衡的問題,控制較復雜,嚴重影響整個系統的可靠性[1-3]。
ABB推出一種五電平拓撲結構為有源中性點鉗位(5L-ANPC)轉換器,其將懸浮電容與中點鉗位(Neutral Point Clamp,NPC)拓撲相結合,如圖1(a)所示[3]。與傳統拓撲結構相比,此類五電平拓撲的中點平衡控制更簡單,輸出的電平狀態更加靈活,可靠性更高。為提高效率,文獻[4]提出了一種新拓撲,如圖1(b)所示。此拓撲能保證大電流時導通的開關管從3個降低為兩個。然而,此拓撲效率雖然獲得了提升,但是為了效率等,其在高壓情況下開關管Q1和Q6的應力較大,尚待優化。針對上述問題,文獻[5]提出了一種七電平的控制方式,然而其方案會降低轉換器輸出電流質量,電流畸變偏大。
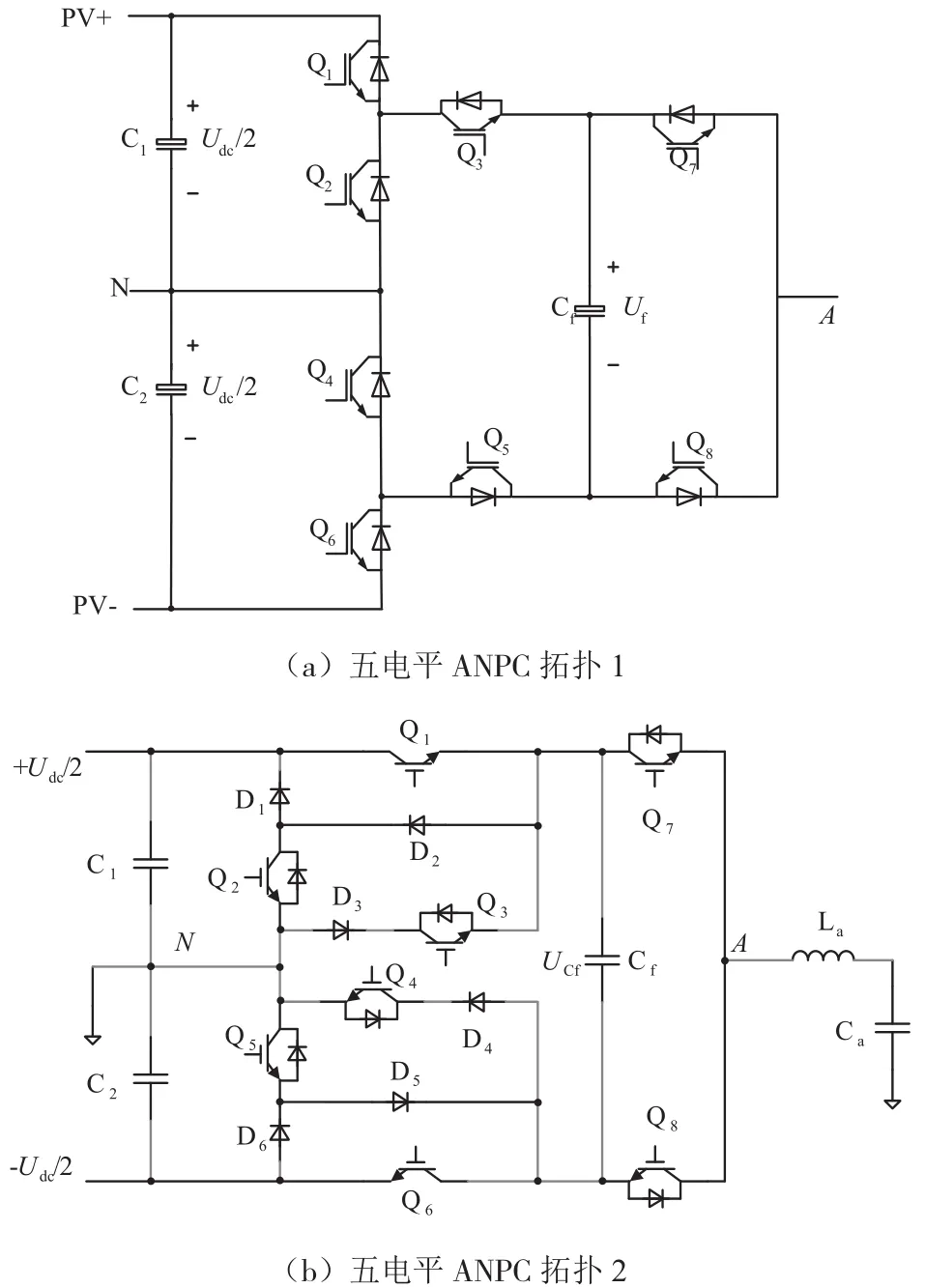
圖1 單相含懸浮電容的五電平逆變器
為了克服這些問題,本文基于圖1(b)提出了一種新的調制策略來確定要選擇的適當開關狀態,即使在懸浮電容器電壓存在不平衡時,也可以產生所需的輸出電壓。所提出的調制技術控制懸浮電容電壓不必總是等于直流母線電壓的1/4,在高壓時使得逆變器處于七電平調制策,采用平均的概念,結合最近矢量調制和懸浮電容控制平衡方案控制輸出電壓占空比,高壓時在保證器件應力的前提下保證逆變器輸出電流質量。最后,在高壓下通過MATLAB進行仿真,驗證了所提調制策略的正確性與可行性。
1 ANPC五電平轉換器工作原理
基于懸浮電容的五電平ANPC轉換器如圖1(b)所示,其輸入側由兩個電容串聯組成,每個電容的額定電壓值為直流母線電壓的一半,即Udc/2。此類拓撲結構要求每一相都有一個懸浮電容Cf,通常控制其電壓應為直流母線電壓的1/4,即Udc/4。基于懸浮電容Cf的五電平ANPC轉換器由8個開關狀態組成,根據電容器電壓在輸出端產生不同的電壓電平,各個矢量的開關組合及電壓輸出如表1所示。
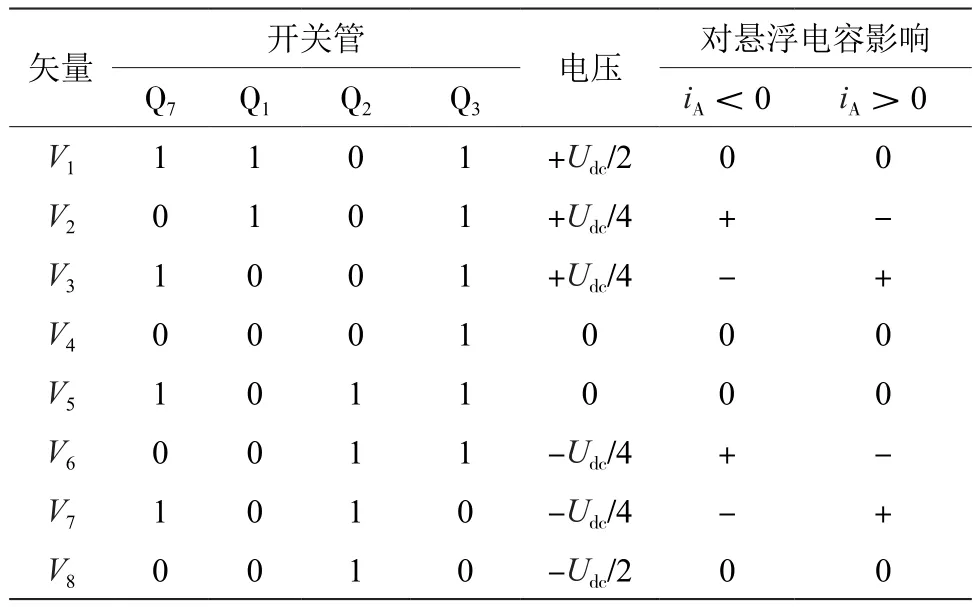
表1 五電平各個矢量及開關狀態表
表中開關管Q7的驅動G7與開關管Q8的驅動G8互補,當驅動G7為0時,對應驅動G8為1,當驅動G7為1時,對應驅動G8為0;開關管Q1的驅動G2與Q4的驅動G5互補,開關管Q2的驅動G2與Q5的驅動G5互補,開關管Q3的驅動G3與開關管Q6的驅動G6互補,其驅動關系和G7/G8一樣。表1為五電平各個矢量及開關狀態表,其中開關管為“0”則表示其斷開,開關管為“1”則表示其導通。對于正半周期,可推導出輸出電平的計算公式為:

其中開關管Q5的驅動G5的狀態為:
式中,Uo為調制波信號。
以直流母線重點N為參考點,則該電路橋臂輸出電壓UAN可以輸出5個電平,分別為Udc/2、Udc/4、0、-Udc/4以及-Udc/2。某些開關狀態在產生一定的輸出電壓電平時是冗余的,如V2和V3是冗余開關狀態以生成Udc/4,類似地,(V6,V7)和(V4,V5)是分別生成-Udc/4和0的冗余狀態。盡管冗余開關狀態(V2,V3)和(V6,V7)產生相同的輸出電壓電平,但由于流過懸浮電容Cf的電流方向是變化的,它們對懸浮電容電壓的影響彼此相反,故此相同電平提供了調節其兩端電壓的機會。例如,當輸出參考電壓介于Udc/4和Udc/2之間時,可以使用開關狀態V2和V4或V3和V4。選擇使用其中的一個(V2或V3),主要目標是減少參考電壓和實際懸浮電容電壓之間的差異。為了調節懸浮電容電壓,基于表1中矢量和輸出電流對懸浮電容的影響,在選擇開關狀態V2或V3時必須考慮輸出電流的極性。當輸出電流的極性為正時,選擇V2矢量則懸浮電容Cf會放電,因此,懸浮電容的電壓會降低,而V3矢量的選擇會導致懸浮電容的電壓將增加。從上述的分析可推導出懸浮電容電壓波動公式為:

通過上述分析可知,依據對應相的輸出電流方向,為了達到控制懸浮電容電壓的平衡,進而實現五電平輸出的目的,需要在正或負半周期通過選擇合適的矢量來進行狀態切換。但是,考慮應力等問題,可以使用不同的控制技術和策略來確定懸浮電容電壓的參考值。
2 基于懸浮電容的ANPC的調制技術
傳統上,調制器只需要輸出參考電壓作為輸入,假設懸浮電容Cf電壓調節到Udc/4,可以利用5個不同的電壓電平來生成所需的輸出電壓。但是,一般而言,必須考慮參考懸浮電容電壓值,特別是輸入電壓為高壓的時候,需要通過調制降低Q1和Q6的應力。
控制懸浮電壓超過Udc/4,由于懸浮電容電壓波動,V2和V3矢量的輸出電平將不再相同,同理V6和V7矢量的輸出電平將也不再相同,故可以使用7種不同的電壓電平來生成所需的輸出電壓[5]。控制輸出七電平,然而其使用的是七電平方案不是最近矢量調制,輸出電壓在過度點波動過大,進而導致輸出電流THD偏大。故結合最近矢量調制和懸浮電容控制平衡的方案,提出一種基于平均的概念進行新的調制策略。
通常,每個采樣時間Ts內輸出電壓UAN的平均值Uos可以表示為:
式中,UAN(t)是輸出開關電壓。
圖2為參考電壓波形,Uref位于兩個電壓電平Ux和Uy之間,結果輸出電壓跟蹤基于式(4)的參考波形。
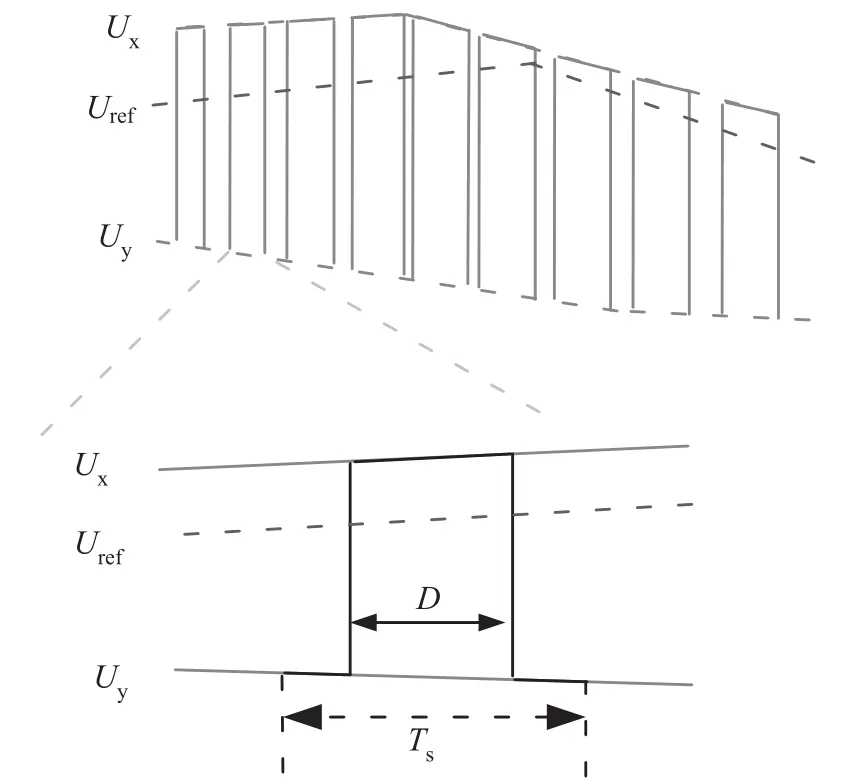
圖2 采用變化的最近電壓產生PWM用于跟蹤參考電壓
盡管懸浮電容兩端存在電壓波動,但假定采樣時間Ts內電容器電壓的變化很小,則其波動電壓可以忽略不計,即圖2中電壓電平Ux和Uy的變化被忽略,Uref的表達式為:
通常,為了在特定的持續時間內從兩個不同的電壓電平Ux和Uy生成Uref,則占空比D為:

控制懸浮電壓超過Udc/4,V2和V3矢量的輸出的電平將不再相同,V2此時的橋臂電壓為:

V3此時的橋臂電壓為:

同理V6和V7矢量的輸出電平將也不再相同,可以使用7種不同的電壓電平來生成所需的輸出電壓。圖3顯示了懸浮電容電壓超過正常額定值Udc/4的示意圖,對應橋臂輸出電壓UAN將會出現7個電平。
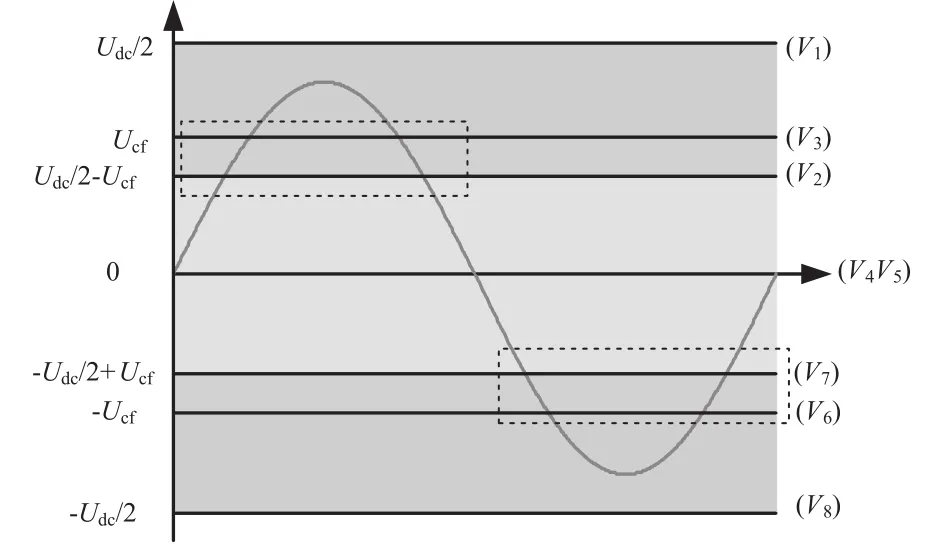
圖3 矢量狀態及7個電平示意圖
基于平均技術,實施平均方法以獲得懸浮五電平逆變器中所需的輸出電壓。重點對圖3中輸出電壓的虛線部分進行優化,需要利用兩個最接近的適當電壓電平來生成所需的輸出電壓,使得輸出電壓更為平滑,輸出電流的THD也更好。
基于對懸浮電容電壓的影響來確定適當電壓電平選擇的規則。例如,在某個時間,如果懸浮電容的實際電壓不同于預設的參考電壓,則必須通過使用表1選擇適當的開關狀態來對懸浮電容進行充電。在表1中,如果輸出電流為正,電壓電平(Udc/2-UCf)的選擇會使懸浮電容Cf充電,如果為輸出電流負,電壓電平UCf的選擇會使懸浮電容充電。因此,根據輸出電流的iA的符號,需要選擇電壓電平(Udc/2-UCf)或電壓電平UCf。
3 仿真及實驗驗證
3.1 仿真結果及分析
為了驗證所提出新型調制策略在五電拓撲工作于高電壓下的效果,本文基于MATLAB/Simulink軟件搭建了仿真平臺對其進行仿真研究。其中,直流輸入電壓設置較高,為1 400 V,輸入側的上下電容容量設置為2 400 μF,懸浮電容容值為250 μF,輸出電抗為0.2 mH,開關頻率為16 kHz。考慮Q1和Q6管應力,懸浮電容參考值超過Udc/4額定值,為430 V,輸出直接并入電網,電網線電壓為600 V,輸出功率為100 kW。
圖4為逆變器的橋臂輸出電壓UAN和輸出電流iA的波形。從仿真波形可見,懸浮電容的電壓在430 V附近,橋臂輸出電壓UAN有7個電平,其分別為700 V、430 V、270 V、0 V、-270 V、-430 V以及-700 V。理論上Q1和Q6管的平臺應力降低到930 V,其對應圖3虛線段內存在V2/V4、V3/V4和V1/V2、V1/V3矢量共同調制,進而使得輸出的電壓電平過度較為平穩,圖5為輸出電流的FFT分析,從分析結果來看,THD為2.76%,符合理論分析。
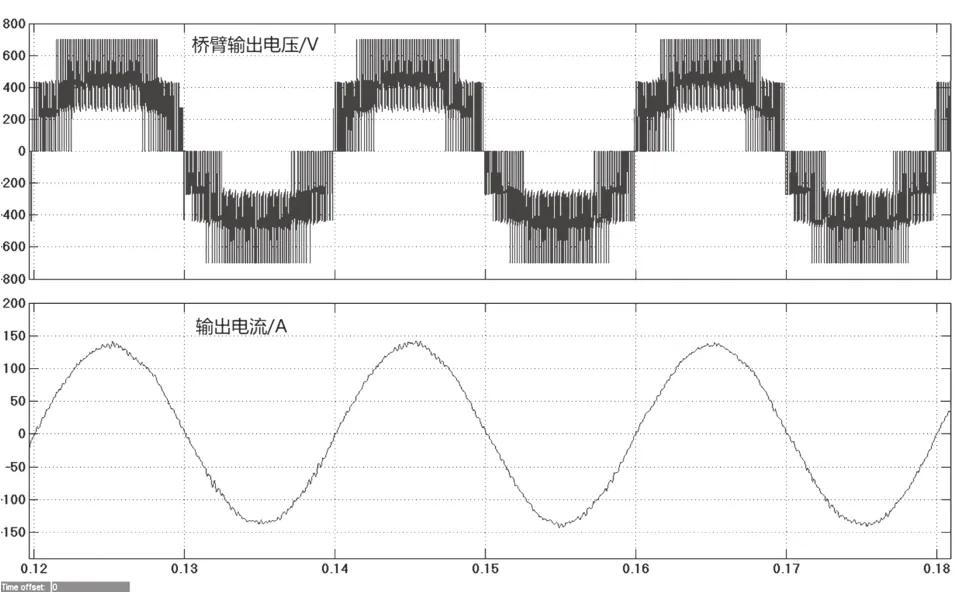
圖4 橋臂輸出電壓和輸出電流波形
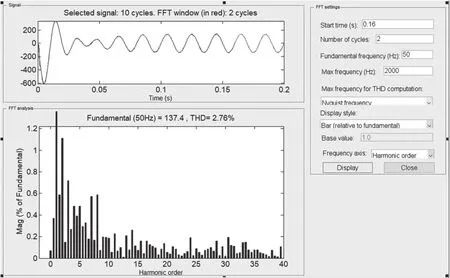
圖5 輸出電流FFT波形
3.2 實驗結果及分析
為了驗證本文所提出的新型調制策略在五電拓撲工作于高電壓下的效果,搭建了一試驗平臺,實驗平臺控制核心采用TI的DSP芯片TMS320F28374S加LATTICE的FPGA芯片,其中FPGA主要用于PWM信號擴展及邏輯電平處理,開關器件采用IGBT。實際實驗的參數和上述仿真參數相同,直流輸入電壓為1 400 V,考慮Q1和Q6管應力,懸浮電容參考值超過Udc/4額定值,為430 V,開關頻率為16 kHz。上下母線電容為2 400 μF的薄膜電容,懸浮電容為250 μF的薄膜電容,輸出電抗為0.2 mH,輸出直接并入電網,電網線電壓為600 V,輸出功率為100 kW。
圖6為試驗波形,其中通道1所示為橋臂輸出電壓UAN的波形,通道3所示為輸出電流iA的波形。從試驗波形可見,懸浮電容的電壓在430 V附近,橋臂輸出電壓UAN有7個電平,分別為700 V、430 V、270 V、0 V、-270 V、-430 V以及-700 V,理論上的Q1和Q6管的平臺應力降低到930 V,其對應圖3虛線段內存在V2/V4,V3/V4和V1/V2,V1/V3矢量共同調制,進而使得輸出的電壓電平過度較為平穩,輸出電流THD較低為2.92%,符合設計要求。實驗結果表明,本文提出的調制策略符合設計要求。
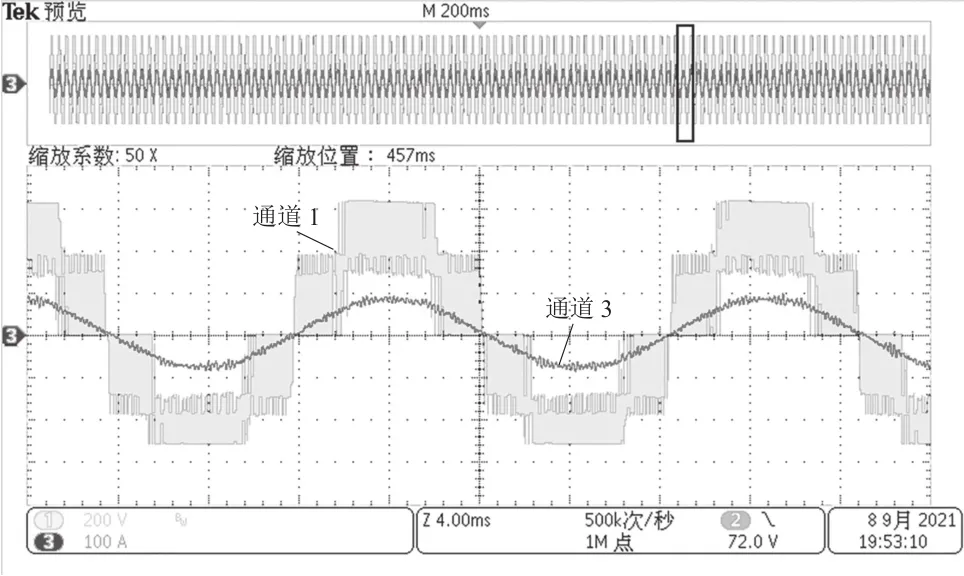
圖6 橋臂電壓和輸出電流的試驗波形
4 結 論
本文針對含懸浮電容的五電平鉗位逆變器的五電平的工作原理進行介紹,總結了懸浮電容電壓的控制,介紹了現有懸浮電容控制方案,為提高高電壓輸入五電平輸出電流質量,并保證開關管應力,提出了一種新的懸浮控制策略,以平均的概念獲得懸浮五電平逆變器中所需的輸出電壓,使得五電平逆變器處于七電平調制策略運行。仿真及實驗結果證明了本文提出控制策略的有效性。