基于滑模變結(jié)構(gòu)的航跡跟蹤控制器設(shè)計(jì)
2021-12-20 07:52:46張云,吳昊
通信電源技術(shù) 2021年12期
張 云,吳 昊
(南京交通職業(yè)技術(shù)學(xué)院 電子信息工程學(xué)院,江蘇 南京 210000)
0 引 言
本文針對(duì)該無人作業(yè)船舶,研究了水面無人作業(yè)船的航跡跟蹤問題,設(shè)計(jì)了基于滑模變結(jié)構(gòu)控制的航跡跟蹤控制器,實(shí)現(xiàn)水面無人作業(yè)船的自主導(dǎo)航。水產(chǎn)養(yǎng)殖自動(dòng)導(dǎo)航船的研究有助于擴(kuò)大養(yǎng)殖規(guī)模,降低人力成本,提高我國(guó)水產(chǎn)養(yǎng)殖的自動(dòng)化水平。
1 無人作業(yè)船研究平臺(tái)
上述用于水產(chǎn)養(yǎng)殖的無人作業(yè)船主要由船體、明輪推進(jìn)器、水草切割系統(tǒng)、自動(dòng)均勻投餌系統(tǒng)以及自動(dòng)導(dǎo)航系統(tǒng)等組成。本平臺(tái)GPS模塊選用的是Trimble公司的BD982型高精度GNSS接收機(jī)模塊及其IO界面板。Trimble BD982 GNSS能夠?qū)崿F(xiàn)船舶位置的精確定位以及航向數(shù)據(jù)的采集。無人作業(yè)船的主控制器采用了由S3C2440芯片組成的ARM9內(nèi)核微處理器模塊,是整個(gè)控制系統(tǒng)的核心。
2 無人作業(yè)船的工作原理
船舶航行至作業(yè)區(qū)域后會(huì)通過GPS、AHRS等其他傳感器獲得船舶當(dāng)前的位置信息、航向角信息、航速、切割器位置、吃水深度以及避障距離等信息[1]。同時(shí)將這些信息傳送到主控制器,主控制器通過與設(shè)定航跡的對(duì)比,得出需要調(diào)整的航向角,來實(shí)現(xiàn)無人作業(yè)船的自主導(dǎo)航。與此同時(shí),船舶會(huì)實(shí)時(shí)調(diào)整明輪轉(zhuǎn)速以及切割臺(tái)的高度,并且開啟切割裝置與傳送裝置以及自動(dòng)投餌系統(tǒng)。之后將以設(shè)定的船速航行,按照規(guī)劃好的路徑開始均勻投餌,并且開始切割并收集水草。通過傳感器檢測(cè)到水草裝滿船艙以后,切割裝置將停止切割,并且提升出水面,開始自動(dòng)返航。
考慮到無人作業(yè)船的安全性與可操作性,該船舶設(shè)計(jì)了手動(dòng)控制、遙控控制以及自動(dòng)控制3種操作方式[2]。手動(dòng)控制主要是在駕駛室內(nèi)的操作,通過操作手柄控制左右明輪電機(jī)的剎車、倒車與調(diào)速,通過相應(yīng)的按鈕開關(guān)控制切割、輸送及割臺(tái)電機(jī)的開關(guān),通過相應(yīng)的旋鈕調(diào)速開關(guān)控制切割、輸送和割臺(tái)電機(jī)速度控制的電位器。遙控控制主要是針對(duì)船上無人以及在停靠岸時(shí),在岸上的人等對(duì)明輪推進(jìn)器等各種裝置進(jìn)行操縱的方式,有利于減輕船的載重以及勞動(dòng)強(qiáng)度,控制更加靈活安全可靠。明輪推進(jìn)器的遙控控制采用的是N-4Q FHSS遙控器和XY3000接收機(jī),具有三通道調(diào)速控制,分別調(diào)節(jié)速度與方向。主控制器將接收機(jī)輸出的帶有占空比的PWM信號(hào)量通過外部檢測(cè)中斷后計(jì)算出此時(shí)的占空比,轉(zhuǎn)換成0~100%占空比的PWM信號(hào)傳輸給電機(jī)驅(qū)動(dòng)器來實(shí)現(xiàn)調(diào)速[3]。控制系統(tǒng)總體設(shè)計(jì)如圖1所示。
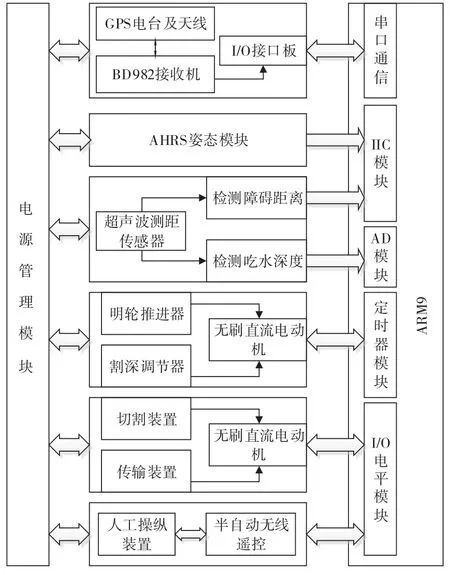
圖1 控制系統(tǒng)總體設(shè)計(jì)框圖
自動(dòng)控制主要是對(duì)割臺(tái)升降自動(dòng)調(diào)節(jié),并用于軌跡跟蹤的運(yùn)動(dòng)控制。其中,割臺(tái)升降調(diào)節(jié)主要是根據(jù)限位開關(guān)和超聲波傳感器來自動(dòng)調(diào)節(jié)割臺(tái)高度以及切割深度。軌跡跟蹤的運(yùn)動(dòng)控制主要是GPS自主導(dǎo)航,根據(jù)由GPS輸出的位置、航向和速度等信息,經(jīng)過ARM9中央處理器的導(dǎo)航控制算法,輸出PWM控制量控制明輪推進(jìn)器[4]。
3 基于滑模變結(jié)構(gòu)的航跡跟蹤控制器設(shè)計(jì)
水面船舶在開闊水域航行,只是通過舵來控制航向進(jìn)而來控制航向偏差。明輪僅僅是作為驅(qū)動(dòng)裝置,提供水面船舶前進(jìn)的動(dòng)力,并不作為控制器的控制輸入使用。由于水面船舶的橫向位移y和航向角ψ的改變,僅僅是通過舵角δ的轉(zhuǎn)矩來實(shí)現(xiàn)的,所以系統(tǒng)局部有明顯的欠驅(qū)動(dòng)特性[5]。根據(jù)以上分析得出,在無外界干擾的情況下,水面無人作業(yè)船的直線航跡控制目標(biāo)是通過適當(dāng)?shù)姆椒ǖ贸靓模沟盟娲暗暮桔E偏差y和航向角ψ都趨近于零,以實(shí)現(xiàn)水面船舶的無外界干擾下的直線航跡控制目標(biāo)。
3.1 滑模變結(jié)構(gòu)控制器設(shè)計(jì)
滑模變結(jié)構(gòu)控制屬于變結(jié)構(gòu)控制系統(tǒng)范疇。該控制方法與常規(guī)控制方法的根本差別在于控制的不連續(xù)性,即該控制方法表現(xiàn)為一種使系統(tǒng)“結(jié)構(gòu)”能隨時(shí)間變化的開關(guān)特性。該控制特性可以使系統(tǒng)在一定特性下沿規(guī)定的狀態(tài)軌跡作小幅度、高頻率的上下運(yùn)動(dòng),即所謂的滑動(dòng)模態(tài)或“滑模”運(yùn)動(dòng)。水面無人作業(yè)船舶具有明顯的欠驅(qū)動(dòng)與非線性特性,運(yùn)用滑模變結(jié)構(gòu)控制的方法設(shè)計(jì)航跡跟蹤控制器可以有效保障系統(tǒng)的魯棒性[6,7]。
水面船舶航跡控制系統(tǒng)的非線性數(shù)學(xué)模型為:

式中,y、ψ代表船舶的位置和航向;和分別為其一階導(dǎo)數(shù);r為船舶在船體坐標(biāo)系下的艏搖角速度;r˙分別為其對(duì)應(yīng)的一階導(dǎo)數(shù);T為時(shí)間常數(shù);K是表征水面無人作業(yè)船回旋性能指標(biāo)的參數(shù),即旋回性指數(shù),α是非線性項(xiàng)模型系數(shù)。
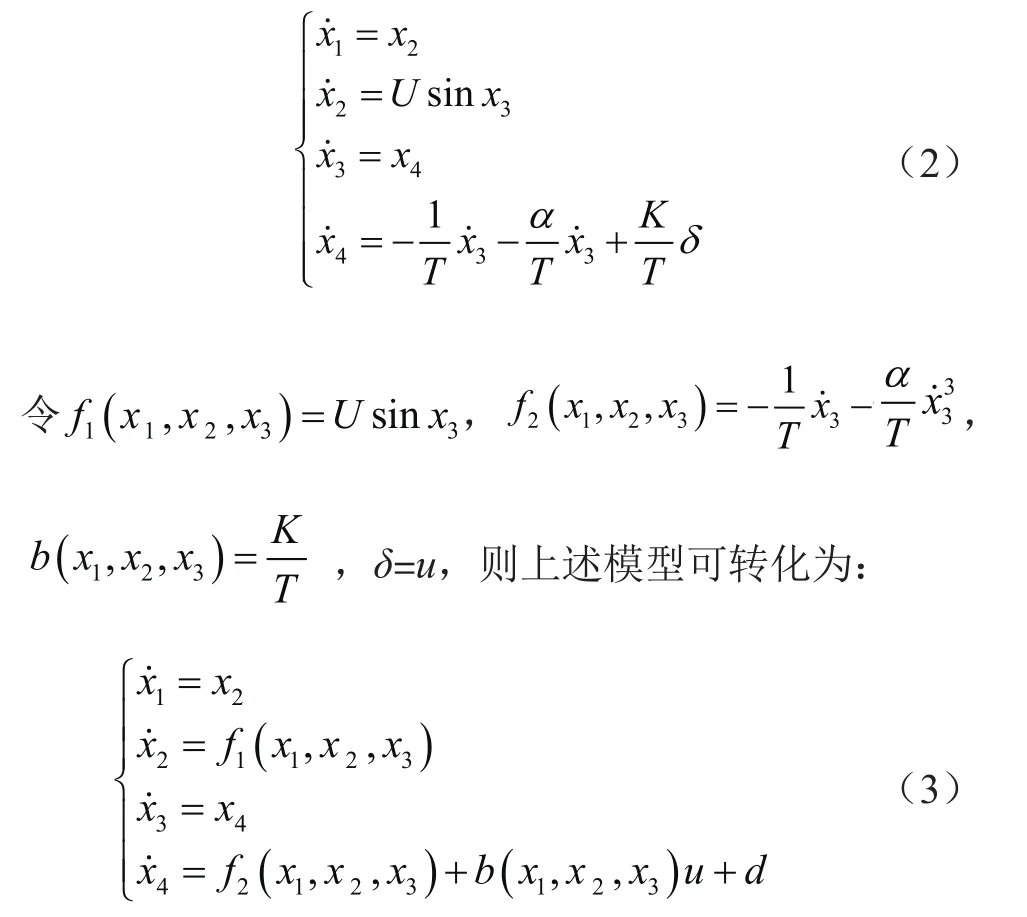
式中,u為控制輸入;d為控制干擾,|d|≤。水面船舶航跡控制的控制目標(biāo)為xi→0,i=1,2,3,4。取誤差方程為:
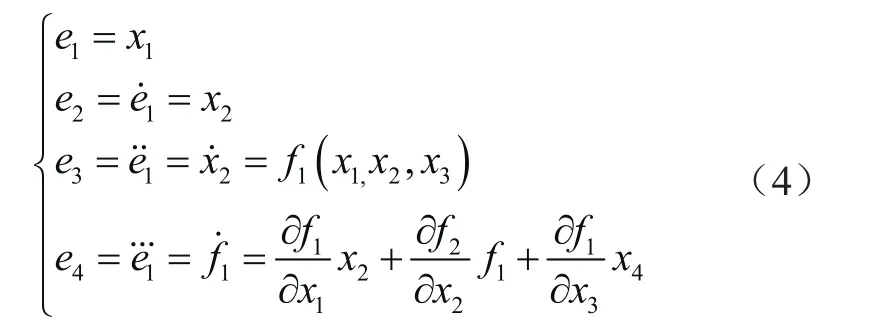
根據(jù)以上系統(tǒng)描述,取滑模函數(shù)為:

式中,ci>0,i=1,2,3。
根據(jù)以上分析,將控制律設(shè)計(jì)為等效控制與切換控制之和為:

式中,λ>0,u即為設(shè)計(jì)的基于滑模變結(jié)構(gòu)控制的航跡跟蹤控制器。下文中通過仿真及實(shí)驗(yàn)的方式驗(yàn)證其可行性。
3.2 仿真試驗(yàn)
本節(jié)對(duì)水面船舶航跡跟蹤系統(tǒng)的滑模控制算法進(jìn)行了仿真研究及分析。應(yīng)用MATLAB/Simulink中的S-Function模塊搭建Simulink仿真模型。控制目標(biāo)為xi→0,i=1,2,3,4,被控對(duì)象的初始狀態(tài)取[0.15 0 0 0],取c1=27、c2=27、c3=9、ρ=1.0、λ=1.0,采用控制律式(6)~式(8)。滑模控制中,采用飽和函數(shù)方法,取邊界層厚度Δ為0.05,仿真試驗(yàn)結(jié)果如圖2和圖3所示。
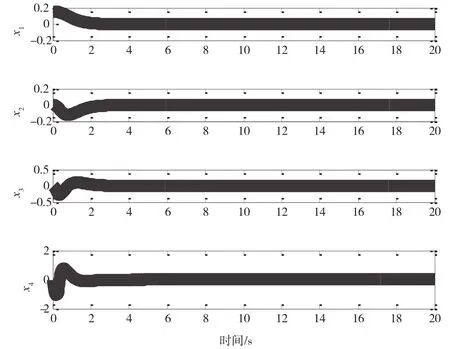
圖2 系統(tǒng)狀態(tài)的響應(yīng)圖
圖2和圖3為初始狀態(tài)為[0.15 0 0 0]時(shí)系統(tǒng)狀態(tài)的響應(yīng)與控制輸入圖,系統(tǒng)狀態(tài)在能在2 s左右的響應(yīng)時(shí)間內(nèi)收斂至零。由圖可以看出,系統(tǒng)各個(gè)狀態(tài)響應(yīng)時(shí)間短,響應(yīng)速度快,收斂性好,系統(tǒng)具有非常好的魯棒性,由此證明了該控制算法的可行性。

圖3 控制輸入
4 實(shí)驗(yàn)驗(yàn)證
實(shí)驗(yàn)地點(diǎn)選取在某池塘進(jìn)行,采用如圖4所示長(zhǎng)、寬、高為1.4 m、0.85 m、0.4 m的600 W功率的明輪船搭載控制系統(tǒng)進(jìn)行實(shí)驗(yàn),以期證明上所述方法的可行性與有效性。圖5中標(biāo)注的①、②、③、④的紅色虛線是船舶的規(guī)劃路徑,實(shí)線為船舶的實(shí)際路徑曲線。
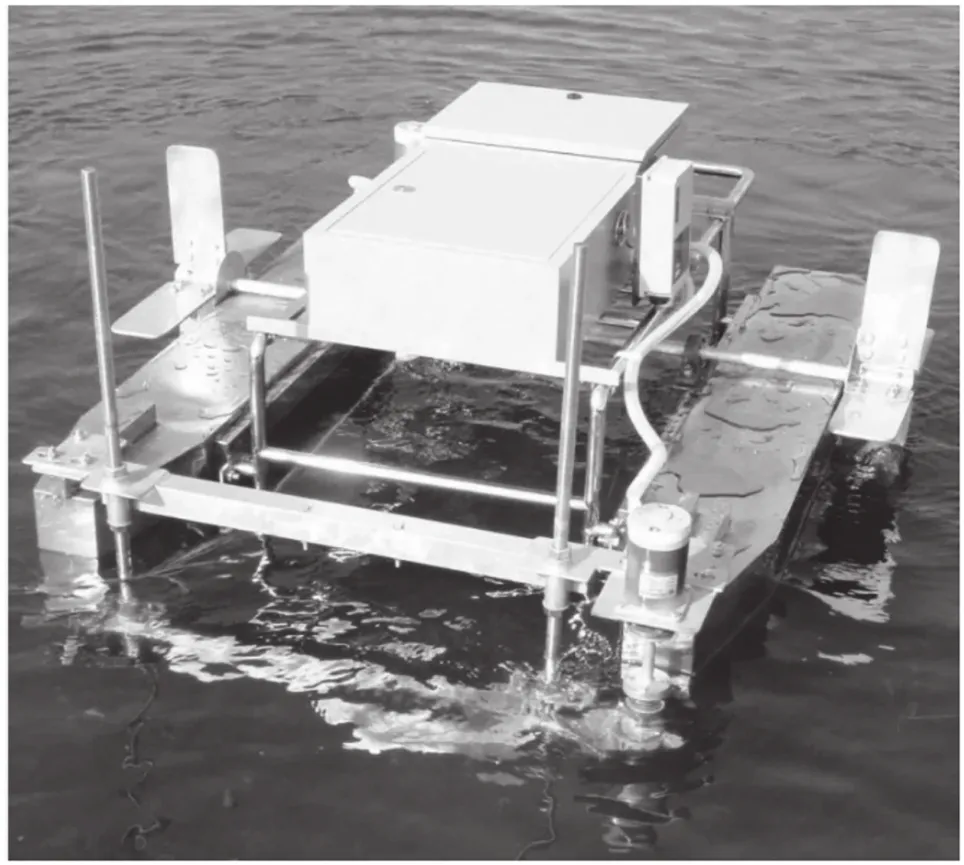
圖4 明輪動(dòng)力移動(dòng)平臺(tái)
如圖5所示,從起始點(diǎn)到位置①,船舶的跟蹤軌跡相對(duì)比較平滑,行駛比較平穩(wěn);從位置①到位置②,最初沿設(shè)定路線跟蹤,跟蹤過半后,跟蹤精度迅速下降,船舶未能準(zhǔn)確到達(dá)位置②;從位置②到位置③跟蹤偏差較大;從位置③到位置④,由于干擾強(qiáng)度突然變大,跟蹤軌跡出現(xiàn)迂回后最終到達(dá)位置④,但該段航跡偏差很大,控制效率很低。原始條件下的導(dǎo)航實(shí)驗(yàn)失敗。在導(dǎo)航信號(hào)不穩(wěn)定或干擾較大的情況下,無人船雖然能夠完成規(guī)劃的路線,但其控制精度較差。

圖5 原始條件航跡跟蹤實(shí)驗(yàn)
圖6為引入滑模控制后的航跡跟蹤效果圖,從起始點(diǎn)到位置①,船舶的跟蹤軌跡相對(duì)比較平穩(wěn);從位置①到位置②,位置②到位置③,位置③到位置④雖然有一定的跟蹤誤差,但是跟蹤相對(duì)平穩(wěn),控制效率較高。協(xié)調(diào)各參數(shù)后進(jìn)行實(shí)驗(yàn),結(jié)果如圖7所示,導(dǎo)航曲線基本能和設(shè)定路線重合,導(dǎo)航誤差較小,控制精度較好,且穩(wěn)定性較高。

圖6 引入滑模控制的航跡跟蹤圖

圖7 各參數(shù)協(xié)調(diào)后實(shí)驗(yàn)效果
5 結(jié) 論
本文主要介紹無人水面船舶的直接航跡控制,在正確描述直接航跡跟蹤問題的基礎(chǔ)上,將滑模變結(jié)構(gòu)控制與欠驅(qū)動(dòng)船舶航跡跟蹤問題相結(jié)合,設(shè)計(jì)了基于欠驅(qū)動(dòng)船舶直接航跡跟蹤的控制律。利用MATLAB/Simulink仿真驗(yàn)證了該控制器的穩(wěn)定性與收斂性,并通過實(shí)驗(yàn)驗(yàn)證了該控制律的可行性。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30