工業(yè)機器人傳感器技術(shù)綜述
2021-12-20 06:39:14邢國芬
中國設備工程 2021年22期
關(guān)鍵詞:測量
邢國芬
(天津石油職業(yè)技術(shù)學院,天津 301607)
當今世界各國都在大力發(fā)展工業(yè)4.0,以促進制造業(yè)的轉(zhuǎn)型升級。其目標是借助物聯(lián)網(wǎng)、數(shù)字信息技術(shù)和計算機技術(shù),實現(xiàn)制造過程的智能化、柔性化和個性化,其中發(fā)展、利用工業(yè)機器人是重要方向。近年,工業(yè)機器人代替人力進行很多重復性和復雜性高的工作,促進了工業(yè)的進步,也減輕了工人繁重的重復勞動。近年來,新興技術(shù)如新型傳感器、新的信息技術(shù)紛紛得到突破,工業(yè)機器人技術(shù)也突飛猛進。現(xiàn)代化的工業(yè)機器人可以實現(xiàn)多種功能,比如復雜的焊接、材料運輸、裝配、機械加工等制造環(huán)節(jié)。工業(yè)機器人從傳感器獲取的外界信息,可以幫助工業(yè)機器人判斷自身狀態(tài)和外界環(huán)境,進而幫助其控制和調(diào)節(jié)動作,完成指定的任務。本文回顧了近年來的文獻,對各種傳感器進行總結(jié)。
1 工業(yè)機器人常用傳感器
各種傳感器相當于工業(yè)機器人的手、眼、耳和鼻,有助于識別自身的運動狀態(tài)和環(huán)境狀況。在這些信息的幫助下,控制器可以發(fā)出相應的指令,使機器人完成所需的動作。如下為各種傳感器介紹(表1)。
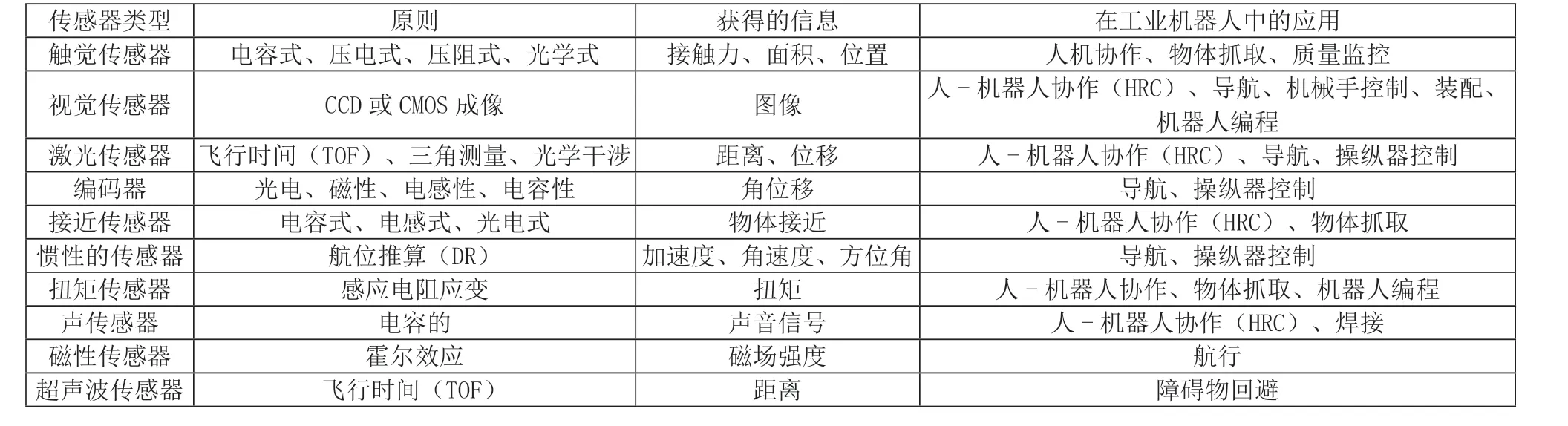
表1 傳感器的簡要概述
1.1 視覺傳感器
視覺傳感技術(shù)近年來發(fā)展較快。目前在三維重建、人臉識別、多機聯(lián)合等領(lǐng)域應用已經(jīng)非常成熟。視覺傳感器采集的圖像由處理器進行處理,提取出對特定任務有用的信息。
視覺傳感器主要包括各種攝像機,比如RGB攝像機、多光譜攝像機和深度攝像機。攝像機中的光敏元件通常是CCD或者CMOS,都是利用光電效應原理,將光信息轉(zhuǎn)換成電信號,繼而轉(zhuǎn)換為數(shù)字信號。不同類型的攝像機有不同的原理,可以提供不同的信息。RGB相機是人們?nèi)粘I钪惺褂米疃嗟囊环N相機,其原理是通過紅、綠、藍3種顏色及其組合來獲取各種可見顏色。多光譜相機能夠獲取不同波段的圖像,包括可見光和不可見光波長,因此可以獲得一些RGB相機無法提供的信息。深度相機則將距離信息加入到了二維圖像中,實現(xiàn)了立體成像。
視覺傳感器因其成本低、信息豐富、使用方便等優(yōu)點而廣受歡迎。然而,視覺傳感器的數(shù)據(jù)處理是復雜和耗時的。雖然許多研究者提出了幾種算法,但其適用性和靈活性還不是很令人滿意。
1.2 觸覺傳感器
觸覺傳感器和人類通過觸覺感知一樣,工業(yè)機器人也需要觸覺來對環(huán)境進行感知。因此,觸覺傳感器就成為了工業(yè)機器人智能化的必備元件,它使工業(yè)機器人具備了靠觸覺來感知的能力。
根據(jù)原理不同,觸覺傳感器主要有4種方式。壓電式、壓阻式、電容式和光學原理式。壓電觸覺傳感器是基于壓電效應原理,即在外界力的作用下,壓電材料表面因形變會產(chǎn)生電壓。它的頻率響應好,測量范圍大,但分辨率不是很理想。壓阻式觸覺傳感器基于壓阻效應原理,即施加外力時會產(chǎn)生自身電阻的變化。它測量范圍大,魯棒性好,但是遲滯效應較大。電容式觸覺傳感器利用電容的變化來測量接觸力。其空間分辨率高,功耗低,但抗干擾能力差。光學原理的觸覺傳感器靠檢測光的參數(shù)變化間接感知外界的接觸信息。優(yōu)點是抗干擾能力強,具有很高的空間分辨率。
雖然觸覺傳感器越來越受到較多關(guān)注和研究,但其多功能性和適應性等性能目前還不盡如人意。它們的發(fā)展依賴于各種技術(shù)領(lǐng)域的進步,如材料、電子學、相關(guān)算法等。要達到等同于人類觸覺感知的水平,還需要更深入的研究。
1.3 激光傳感器
激光發(fā)明于20世紀,因為其在單色性、方向性和亮度方面都有出色的性能,因此被廣泛應用于各種場合。
激光傳感器主要由測量電路、激光器和光電探測器等組成。激光器分為四類:固體、液體、氣體和半導體。激光傳感器主要用于對距離、速度和振動等物理參數(shù)的測量上。常見的有激光測距儀、激光位移傳感器、激光掃描儀、激光跟蹤器等。激光測距的基本原理主要包括三種:飛行時間(TOF)、三角測量法和光學干涉法。TOF是指從發(fā)射激光到接收到反射光的總時間。在激光測距儀中,由于光速太高,測距精度取決于飛行時間的測量精度上。三角剖分法利用三角形理論和三角函數(shù)來計算物體之間的距離。激光位移傳感器就是基于這種方法來實現(xiàn)短距離測量的。兩束相位不同的光束疊加后形成明暗條紋的現(xiàn)象被稱為光的干涉。此原理被用于激光跟蹤器中,可以測量裝有反射鏡的目標的移動距離。
激光傳感器能夠遙感測量,測量速度和精度都令人滿意。但是,激光波長容易受溫度、大氣壓力和空氣濕度變化的影響。當上述參數(shù)發(fā)生變化時,需要進行補償才能達到更高精度測量。
1.4 編碼器
編碼器將角位移或角速度轉(zhuǎn)換為電脈沖或數(shù)字量。
編碼器根據(jù)檢測原理可分為:光電式、磁性、電感式和電容式。光電式編碼器是其中最常用的。將光信號轉(zhuǎn)變?yōu)殡娦盘枴8鶕?jù)碼盤的校準方式,光電編碼器分為增量式和絕對式。增量式光電編碼器的輸出是一系列方波脈沖。旋轉(zhuǎn)角度可以通過記錄脈沖的數(shù)量計算出來。但是需要一個參考位置作為轉(zhuǎn)軸的零點絕對位置。絕對式光電編碼器軸上的每個位置都對應有唯一的二進制數(shù)字量,因此可以直接得到絕對位置。
編碼器因其結(jié)構(gòu)緊湊、使用壽命長、使用方便、技術(shù)成熟等優(yōu)點而被廣泛應用。編碼器的分辨率取決于圓中編碼盤上刻線的數(shù)量。更多的線能夠識別較小的角度,從而產(chǎn)生更高的分辨率,當然成本也會更高。
2 其他傳感器
除上述4種傳感器外,工業(yè)機器人中還部署了一些傳感器來實現(xiàn)多種功能,如接近傳感器、慣性傳感器、扭矩傳感器、聲傳感器、磁傳感器、超聲波傳感器等。
接近傳感器能夠檢測到物體是否接近,并輸出相應的開關(guān)信號。根據(jù)操作原理可分為電容式、電感式和光電式。電容式接近傳感器利用檢測電極的電容變化引起的電路狀態(tài)變化來感知接近的物體。感應式接近傳感器是基于電磁感應原理。它們的傳感元件是檢測線圈,當金屬物體靠近時,其電感量會發(fā)生變化。光電接近傳感器通常由發(fā)光二極管和光電探測器件組成。當物體接近時,光電二極管發(fā)出的光被反射到光電探測器件上,通過檢測電路產(chǎn)生相應輸出信號。
慣性傳感器包括加速度計、陀螺儀和磁強計。慣性傳感器被廣泛用于測量運動物體的運動參數(shù),比如加速度、角速度和方位角。通常,三者的組合被稱為慣性測量單元(IMU)。慣性傳感器的測量原理是航位推算(DR)。利用積分的方法來計算物體的運動量。慣性傳感器的精度在短時間內(nèi)是令人滿意的,但是長時間漂移誤差較大。
扭矩傳感器主要用于測量施加在機械軸上的扭矩。常見的類型有感應式和電阻應變式。其結(jié)構(gòu)通常由扭力桿和線圈、電阻應變片等檢測元件組成。通過檢測元件參數(shù)的變化,將扭矩引起的扭桿扭轉(zhuǎn)變形轉(zhuǎn)化為電信號,實現(xiàn)扭矩測量。
聲波傳感器能夠把聲波轉(zhuǎn)換成電信號。其中裝有電容駐極體傳聲器,聲波會引起傳聲器中駐極體膜的振動,產(chǎn)生微弱的電壓變化。然后對電壓進行后續(xù)處理。
磁傳感器主要用于檢測磁場強度。其原理是霍爾效應。霍爾效應是指當電流流過導體時,會產(chǎn)生一個垂直于磁場和電流方向的電場,從而在導體表面產(chǎn)生電位差的現(xiàn)象。
超聲波傳感器常用于探測障礙物。根據(jù)從發(fā)射超聲波到探測回波的時間來估計物體的范圍。
3 結(jié)語
本文綜述了近年來工業(yè)機器人中常用的傳感器及其具體應用。工業(yè)機器人的發(fā)展將有助于實現(xiàn)更加靈活、精確和個性化的工業(yè)制造。然而,工業(yè)機器人發(fā)展中的一個重要挑戰(zhàn)是開發(fā)性能更好的傳感器,以改善其對外界環(huán)境和自身狀態(tài)的精確感知,這有賴于多學科技術(shù)的發(fā)展和融合。此外,還需要對傳感器獲取的信息處理算法進行優(yōu)化,以提高處理速度和精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
