高空大型滑模鋼平臺整體吊裝安裝技術
2021-12-21 09:03:38陳楊化胡衛兵喻寧招張鋒凌張鳳舉王貴榮鄒麗文成家州
建筑施工 2021年8期
關鍵詞:施工
陳楊化 胡衛兵 喻寧招 張鋒凌 張鳳舉 王貴榮 鄒麗文 成家州
中建三局第二建設工程有限責任公司 湖北 武漢 430074
在鋼筋混凝土筒體結構施工中,由于存在滑模鋼平臺剛度和穩定性差、吊裝定位準確性難以保證及與下部結構連接困難等問題,通常采用分段吊裝、空中拼接技術,但工期耗時長、施工成本高[1-4]。針對類似情況,本項目將采用滑模鋼平臺地面組裝后整體吊裝安裝技術,在降低建造成本的同時,極大地節約了施工工期。
1 工程概述
國外某光熱光伏混合電站項目的吸熱塔高262 m,塔身51 m以下為方形結構,51~82 m為方形結構變成圓形的過渡段,82 m以上為純圓形結構。根據擬定方案,待混凝土筒壁施工至51 m后,采用地面組裝整體吊裝的方式完成更換滑模鋼平臺的作業任務。
該滑模鋼平臺為方形鋼構架結構,長、寬約30 m,分別由8榀主輻射梁、8榀次輻射梁、1個中心鼓圈構成。每榀輻射梁由2片鋼桁架平行布置組成,每片鋼桁架高1.85 m,桿件寬80 mm,相鄰2片桁架間距85 mm,用于固定滑模門架。每榀主梁重約8.6 t,次梁重約5.3 t。每榀輻射梁間使用若干工字鋼進行連接。鋼平臺整體重約150 t(圖1)。

圖1 平面布置示意
2 整體吊裝工藝流程
懸臂架作業平臺搭設→支撐系統安裝→吊點設計→吊索具設計→吊裝安裝→倒鏈調節→安裝完成
3 吊裝準備
3.1 懸臂架作業平臺搭設
由于平臺安裝部位位于吸熱塔筒壁51 m高空處,吸熱塔本身墻體寬度較小,無足夠作業空間和立足點,故需要沿筒壁搭設一圈臨時作業平臺,便于工人在安裝過程中高空作業。
在筒壁混凝土施工時提前預埋好螺栓錐形頭,然后采用塔吊將地面拼接好的懸臂架平臺吊裝至安裝點,工人以電梯平臺為起點,同時向兩邊進行安裝。前一個安裝完畢的平臺將成為后一個平臺的操作平臺。
3.2 支撐系統安裝
與地面安裝相比,在高空安裝最大的困難是缺乏可靠的支撐系統。
本次整體吊裝所采用的支撐體系分為2個部分,牛腿支撐和工字鋼支撐。牛腿支撐負責支撐門架,工字鋼支撐負責支撐鋼平臺。啟滑之初,門架支撐桿下部并無凝固的混凝土作為固定,若將鋼平臺與門架直接接觸,由門架承擔平臺質量,則支撐桿容易失穩。
因此,需在混凝土筒壁頂面設置工字鋼支撐單獨支撐鋼平臺,使門架與鋼平臺分離。待滑模混凝土澆筑開始之后,門架緩慢上升,與鋼平臺接觸,鋼平臺荷載由工字鋼支撐體系轉換為門架系統來傳遞荷載。此時可將工字鋼支撐和牛腿支撐拆除。
模板系統及門架內外腿需要固定在墻體兩側,為了固定門架位置,在吸熱塔筒壁兩側按照設計角度放線并安裝牛腿,起吊就位時,門架內外腿著力在牛腿上,通過調整墊塊來確保安裝標高準確無誤。
在主要門架兩側設置HEB160工字鋼,待門架吊裝就位后,使用2根UPN160槽鋼連接工字鋼頂部。待所有工字鋼支撐安裝完畢之后,測量頂部標高,使用墊板將所有的支撐頂部調平至同一水平高度。待鋼平臺吊裝就位后,平臺荷載通過該支撐體系傳遞到混凝土筒壁上,確保安裝過程安全可靠(圖2)。
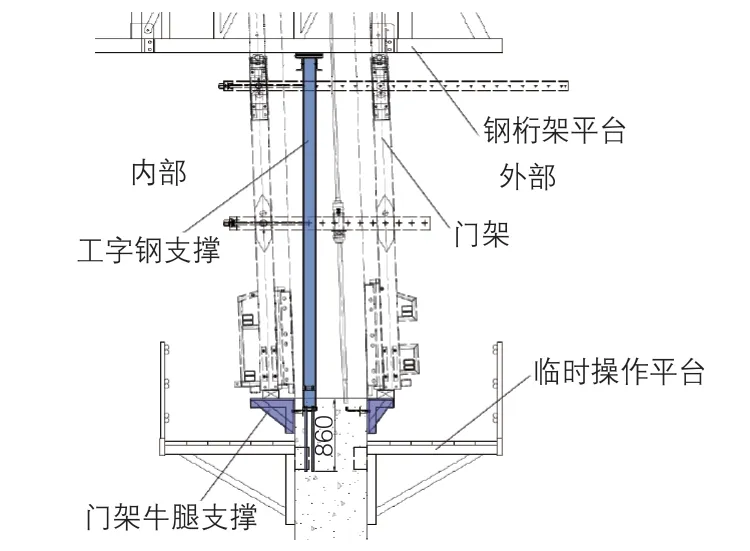
圖2 支撐系統示意
臨時牛腿安裝通過螺絲及預埋在筒壁上的套筒固定在吸熱塔筒壁內外部,間距2~3 m均勻布置且與支撐門架一一對應,使每片門架以簡支方式布置在牛腿上方。臨時支撐工字鋼的下端與筒壁頂面預埋件焊接連接,頂端墊5~10 mm厚的鋼板簡支,用于滑模鋼平臺輻射梁的支撐點。布置間距與輻射梁相對應,為4.5~5.0 m。
在臨時支撐系統安裝完畢后,按照設計方案測量放線,使用EC550塔吊按順時針順序逐個吊裝門架就位,門架就位后通過門架連桿及φ32 mm鋼管與相鄰門架首尾相連形成整體,確保滑模鋼平臺在吊裝就位過程中各著力點受力均勻,安裝工作安全可靠。
4 鋼桁架整體吊裝
4.1 吊點設計
根據有限元模型分析,在所有節點變量空間內進行組合計算,通過計算得到的內力結果計算桁架的應變能,對不同的應變能結果進行排序,得到最小的應變能。此狀態下吊裝將使鋼平臺的各桿件應力及節點位移都處于一個較合理的狀態,吊點約束組合就可以認為是最佳吊點組合。
此時,鋼平臺桿件最大應力比為0.9<1.0;最大位移為70 mm<L/300=75.3 mm。鋼平臺整體剛度和穩定性滿足吊裝條件。
最終確定的吊裝方案為每榀主梁上設置2處吊點,距離中心點分別為8.5 m和11.3 m;每榀次梁上設置1處吊點,距離中心點15.5 m,共24處吊點(圖3)。
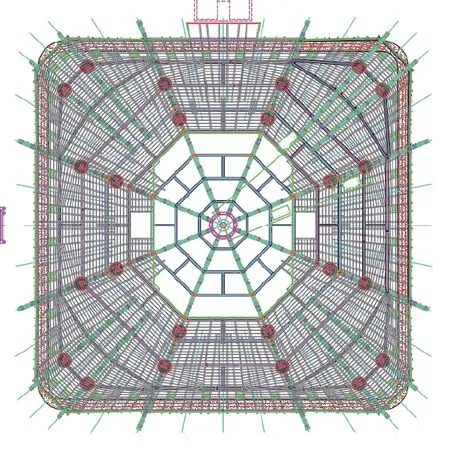
圖3 吊點平面布置示意
4.2 吊耳
鋼桁架吊裝采用特殊設計的軸式吊耳,吊索與銷軸接觸傳力,銷軸通過墊板將力傳遞至桁架上弦桿及豎腹桿。該形式的吊耳可以避免焊接連接對桁架造成的結構性損傷,由于耳板不受力,摩擦造成損傷斷裂的風險也能得到規避,且方便安拆。吊耳采用螺桿拴在鋼桁架的上弦和斜撐節點處。
4.3 吊裝索具設計
根據模型分析結果,配備相應的吊裝索具(表1),并核算吊索應力,確保吊裝安全。
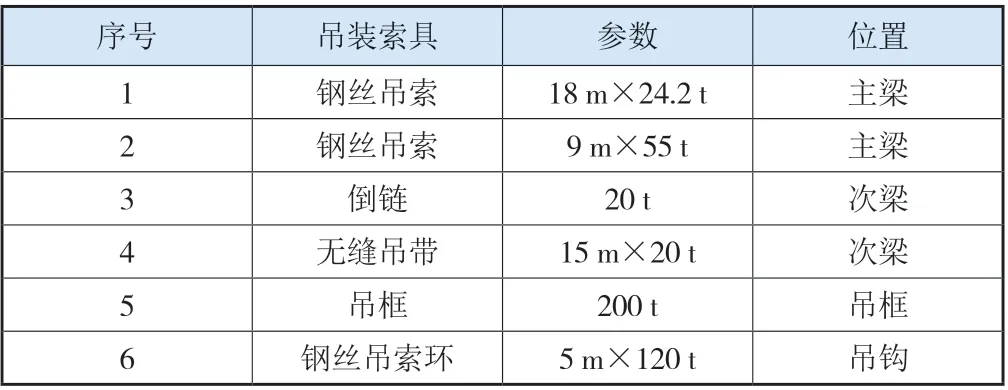
表1 吊裝索具
按照先主梁后次梁的順序連接吊耳與吊索,次梁處使用倒鏈作為可調節吊索。由于吊點和吊索過多,故上方通過八邊形吊框與履帶吊吊鉤連接,保證受力分配均勻。
4.4 吊裝安裝
首先在平臺中心位置安裝激光靶,同時在吸熱塔內部地面對應中心位置安裝激光垂準儀,然后吊裝鋼桁架平臺至吸熱塔上方并調整平臺中心位置,直至激光打在標靶中心,確定中心位置一致后,方可緩慢落吊(圖4)。

圖4 激光正中標靶
落吊過程中使用纜風繩牽引控制平臺的轉動直至輻射梁與門架位置一一對應,然后使平臺緩慢就位,同時保證每個門架均穿過每榀輻射梁的2片鋼桁架間的空隙。由于施工安裝誤差的影響,需要微調門架頂端中線位置,輔助平臺落定(圖5)。
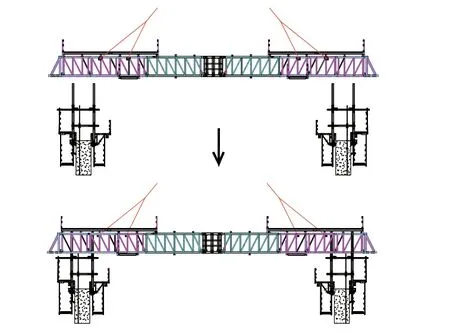
圖5 平臺下落安裝示意
由于本工程滑模鋼平臺采用多索吊裝,在吊裝的過程中,如果全部使用固定長度的吊索,吊索受力會不均勻。另外,根據設計方案要求,在平臺就位時,必須保證滑模鋼平臺4個角點與吸熱塔結構4個吊點法向重疊,將采用先粗略就位、后倒鏈微調法進行二次精確就位。可以使用倒鏈拉動平臺四角進行上下升降,使門架與桁架的固定連接可多次調整校正。通過倒鏈將門架頂端與兩側牛腿支撐連接,調整兩側倒鏈長度直至門架位置與鋼桁架間隙契合。倒鏈安裝如圖6所示。

圖6 倒鏈安裝示意
2片鋼桁架間隙寬度僅85 mm,門架腿寬80 mm,安裝精度要求極高。為了提高安裝容錯率并降低吊裝難度,在門架腿頂端插入梯形導向裝置。梯形導向裝置下部寬度與門架兩腿同寬,均為80 mm,頂部寬度僅30 mm,目的為方便輻射梁與門架穿插(圖7)。
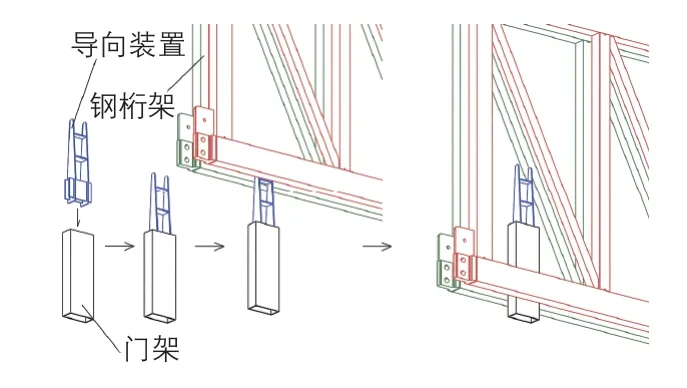
圖7 導向裝置作用原理示意
落吊就位時,首先放松次梁上的吊索倒鏈,使平臺四角略低于主梁,先與門架接觸。按照先次梁、后主梁的順序完成鋼桁架平臺與門架的連接。
5 結語
以國外某光熱光伏發電項目150 t鋼平臺于51 m高空整體吊裝安裝施工為例,介紹了一種針對高空大型鋼平臺整體吊裝安裝的施工方法。與分段吊裝安裝相比,具有工期效益顯著、施工過程簡便、施工成本較低等優勢,對今后類似工程施工具有借鑒意義。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48
