Tsuzuki旋轉式立體編織機編織件的結構模擬與設計
2021-12-23 02:29:18邵慧奇蔣金華陳南梁
東華大學學報(自然科學版) 2021年6期
關鍵詞:編織
楊 鑫, 邵慧奇, 蔣金華, 陳南梁, 謝 波
(1.東華大學 a.產業用紡織品教育部工程研究中心,b. 紡織學院,c.紡織科創中心, 上海 201620; 2. 江蘇省高性能纖維復合材料重點實驗室, 江蘇 常州 213135)
傳統四步法三維編織技術具有預型件一次成型、結構不分層、整體性好等優點[1],但四步法編織機的編織件形狀單一,難以根據產品性能進行復雜的變截面結構設計[2]。為實現復雜結構變截面編織,Tsuzuki等[3]開發出Tsuzuki旋轉型三維編織機,通過Geneva角輪驅動攜紗器,由于每個角輪都由電機單獨控制,極大提高了編織機的截面設計能力[4]。此后,文獻[5-7]提出一些新型旋轉編織機。隨著研究深入,Tsuzuki編織機的優勢越加顯現。Tsuzuki編織機的編織物截面緊湊、結構均一,消除了一般旋轉編織物截面上的孔洞,而且單個角輪控紗數少(4根),使得角輪能夠更加精確地控制攜紗器,可以更加簡單地實現變截面織物的設計。因此,Tsuzuki編織機及其編織件需要重新被研究。
由于一個編織件可能包含成百上千根紗線,其細觀結構極其復雜,利用計算機運算是一種有效的研究手段。文獻[8-9]給出三維編織的模擬方法,由于使用多種軟件交互,導致數據傳輸不便,建模靈活性降低。本文通過對旋轉立體編織機四角輪轉動方式與攜紗器的運動路徑的研究,基于MATLAB軟件[10]強大的計算與可視化能力,開發出一套仿真程序和算法,構建編織細觀結構仿真模型,合理控制角輪的運動規律,并設計運動路徑,從而模擬編織過程,實現了復雜編織物預型件的快速設計,模擬過程簡潔、快速、精確且便于操作[6-7]。
1 編織工藝與編織原理
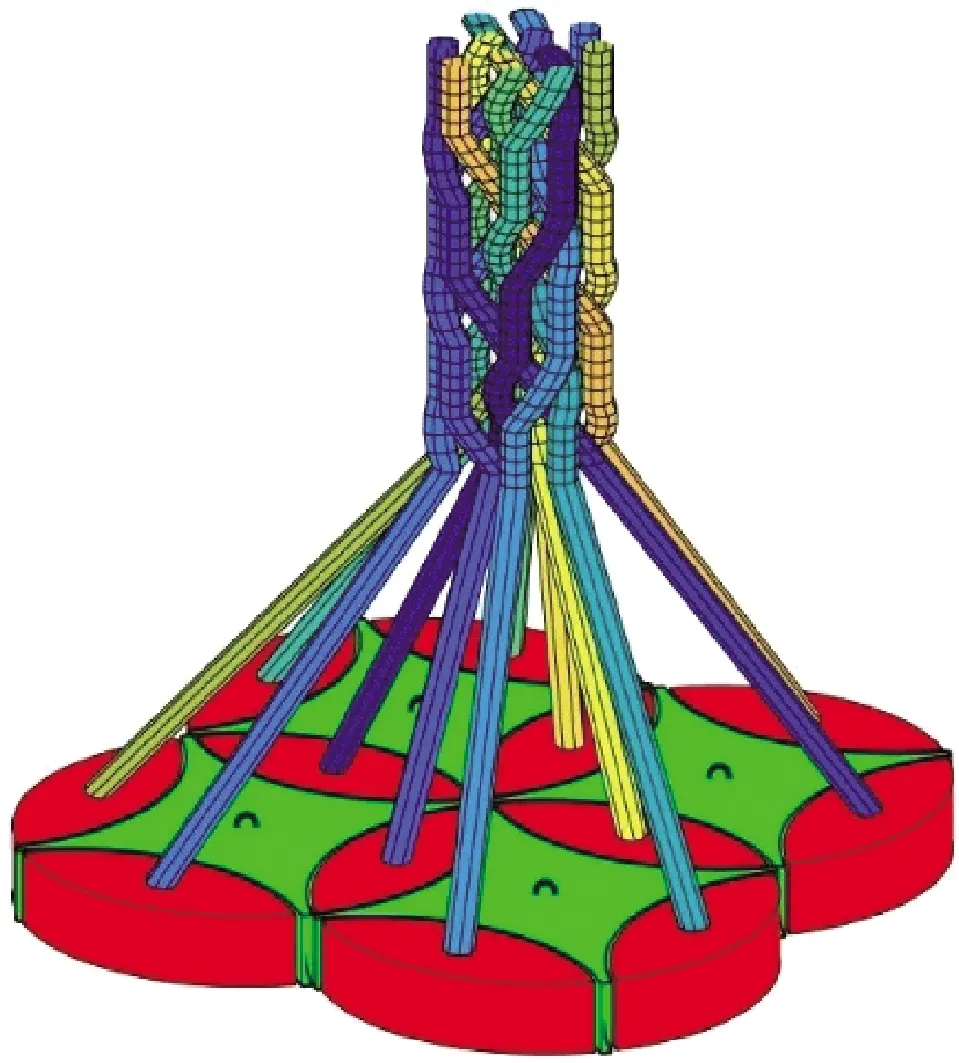
旋轉立體編織設備最初是直接建立在撥盤上的,通過撥盤的運動實現紗線的交織,而Geneva角輪機構[11]的發明為旋轉編織機的改進提供了新方向。Tsuzuki旋轉型立體編織機結構圖如圖1所示。由圖1可知,攜紗器放置在兩個Geneva角輪之間,在編織過程中,相鄰的兩個角輪必須保持其中一個靜止,而另一個運動的角輪將驅動攜紗器繞角輪圓心做90°或者90°倍數的圓周運動,從而實現攜紗器上的紗線相互交織。
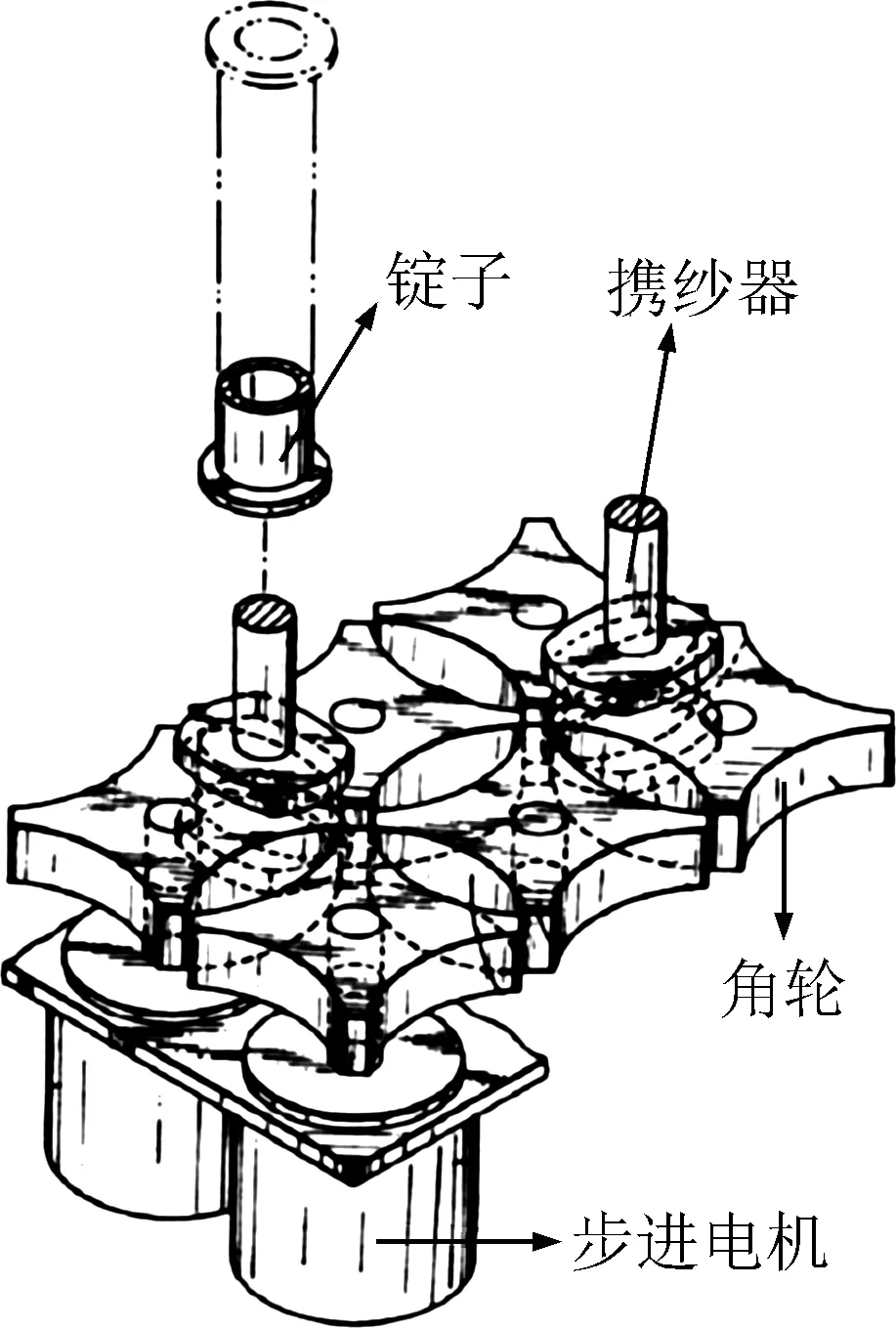
(a) 角輪

(b) Tsuzuki旋轉立體編織機[3]
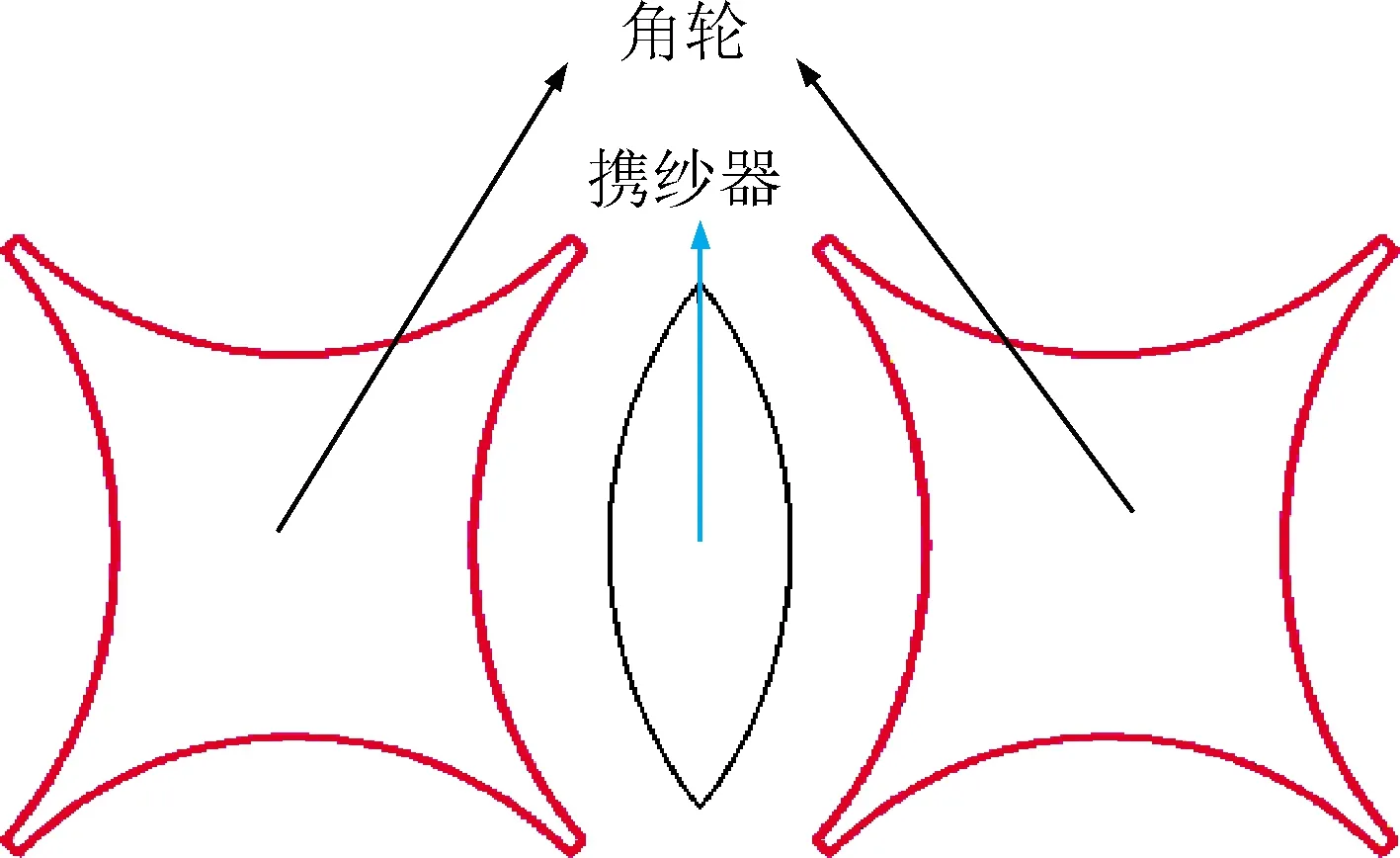
(c)角輪和攜紗器放置平面結構示意圖圖1 Tsuzuki旋轉立體編織機結構圖Fig.1 Sketch of structure of Tsuzuki 3D rotary braider
通過改變角輪的放置形狀,使用Tzusuki旋轉立體編織機可以很方便地編織出各種截面形狀的預制件;通過角輪轉動過程的控制可以設計出更加復雜的立體結構,如Y型管。雖然,相鄰的角輪不能同時轉動,但是從整個底盤考慮而言,在同一時刻,轉動角輪和靜止角輪數量之比最優可以設計為1∶1。
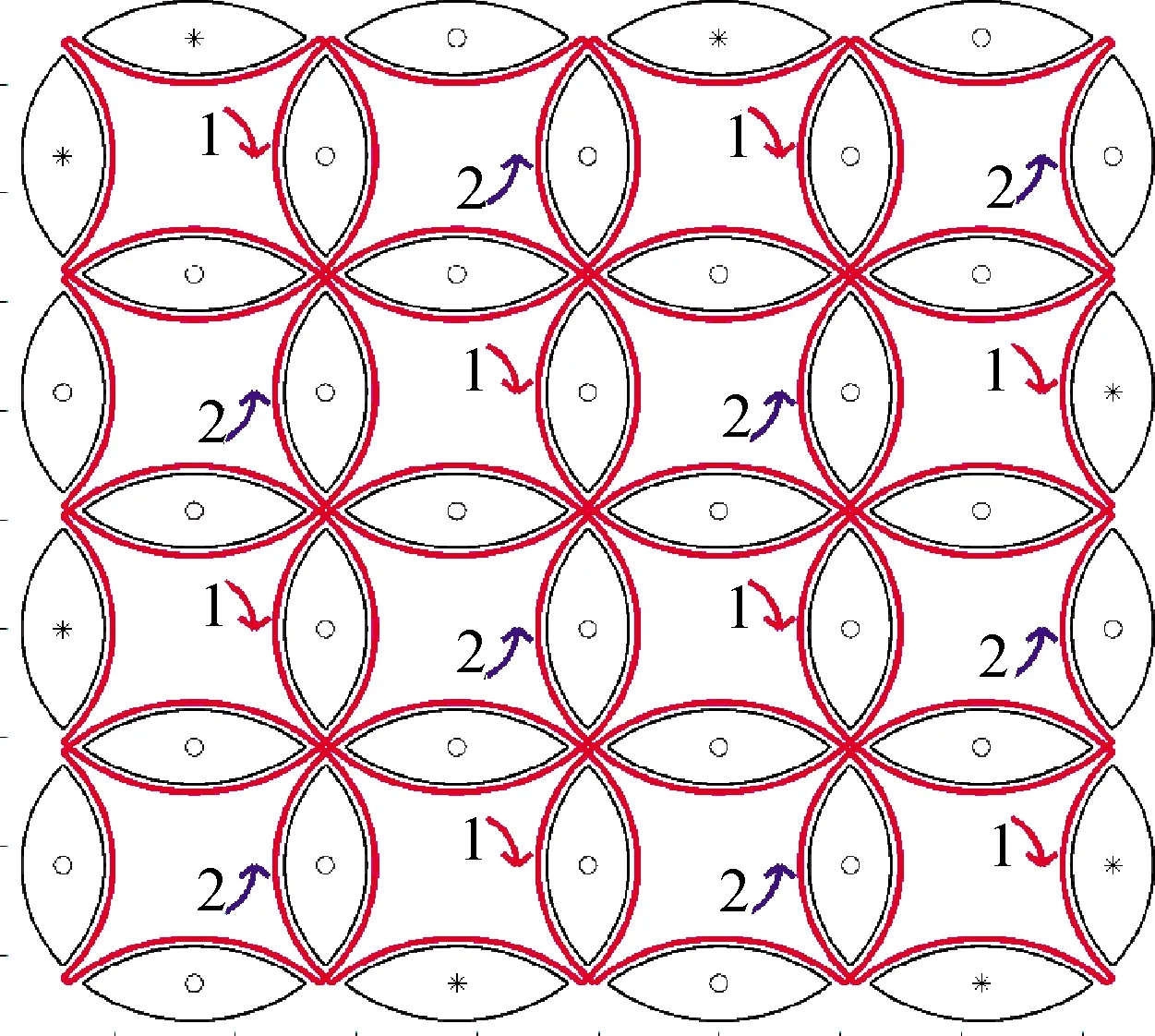
在兩層角輪的底盤上(見圖2(a)),可以將角輪分為兩組,并在角輪上標注相應的組號,用箭頭表示轉動方向,可以設定一組角輪轉動時,另一組角輪靜止,以達到相鄰的角輪不同時運動的目的。首先引入“轉動間隔”概念,由于相鄰角輪不能同時運動,則底盤上角輪轉動一次視為一個轉動間隔,每一個轉動間隔內給定角輪一個運動信息,設定每一轉動間隔的角輪運動信息用整數n表示:n>0為該轉動間隔內角輪順時針轉動n×90°,n=0為該轉動間隔內角輪靜止,n<0為該轉動間隔內角輪逆時針轉動-n×90°[12]。然后將該設備某次運動設定為8個轉動間隔,給定第一組角輪的運動信息為1、 0、 1、 0、 1、 0、 1、 0,將第一組角輪標上順時針標記,表示該組角輪在第一個轉動間隔順時針轉動90°(n=1),第二個轉動間隔靜止(n=0)……第八個轉動間隔靜止(n=0);相應的第二組運動信息為0、 -1、 0、 -1、 0、 -1、 0、 -1,將第二組角輪標上逆時針標記(見圖2(a))。編織時,整個底盤上表現為第一個轉動間隔第一組角輪順時針運動90°,第二組靜止;第二個轉動間隔第二組角輪逆時針運動90°,第一組靜止,如此交替轉動,直至8個轉動間隔的完成。
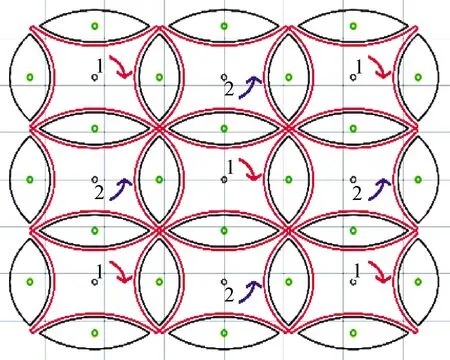
(a) 兩層角輪底盤
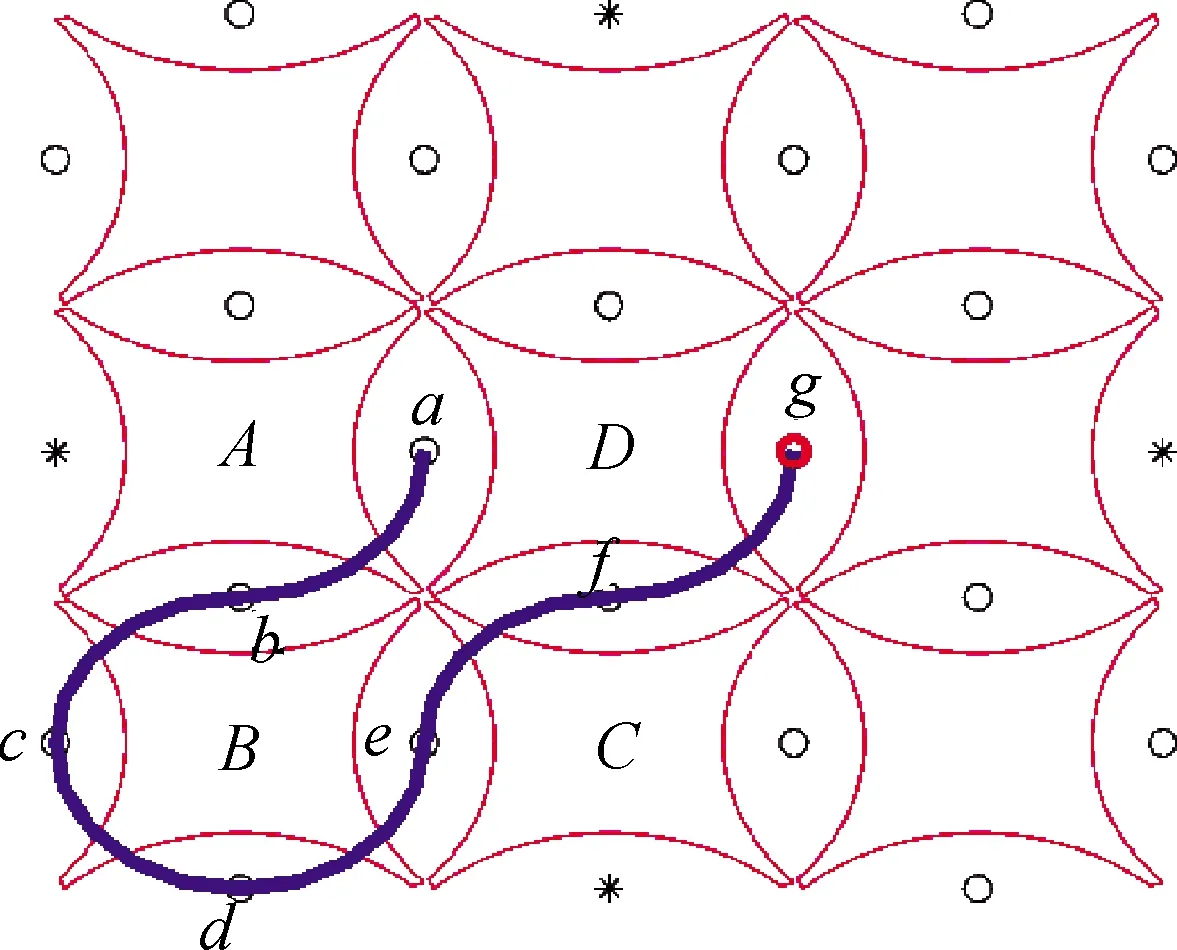
(b)攜紗器運動路徑圖2 兩層角輪底盤與角輪運動路徑Fig.2 Two-layer quadrangle horn gear group and path of carriers’ motion
由圖2(b)可知,在8個轉動間隔之后,a處的攜紗器轉移到g處。在整個過程中有A、B、C、D等4個角輪參與攜紗器的轉移。在第一個間隔時,角輪B、D靜止,角輪A將攜紗器轉移到b處;第二個間隔,角輪A靜止,角輪B將攜紗器轉移到c處;第三和第五間隔,角輪B靜止,攜紗器分別在c、d處靜止;第四間隔角輪B將攜紗器轉移到d,第六間隔角輪B將攜紗器轉移到e;第七間隔,角輪B靜止,角輪C將攜紗器轉移到f;第八間隔,角輪C靜止,角輪D將攜紗器轉移到g。
2 底盤解析及仿真模型建立
2.1 攜紗器路徑分析及算法實現
由于攜紗器是由角輪的驅動而產生運動,角輪圍繞著自身中心轉動,所以攜紗器的每一步運動均繞著對應轉動角輪的中心做固定角度的圓周運動。攜紗器在底盤上的整個運動便可以理解為有限個圓周運動的總和,當攜紗器從a運動到g時,則為6段圓周運動的總和。由此,只要能描述出各段圓周運動的路徑便可以組合成整個路徑。
由于模擬細觀結構不僅需要編程,同時要具備強大的計算和可視化操作的能力,為了避免使用過多軟件進行交互,本文直接使用MATLAB軟件提供的語言進行模擬[13]。
首先將整個底盤坐標化來獲取各部件的位置信息,利用角輪的中心坐標表示角輪位置,用攜紗器的中心坐標表示攜紗器位置,并且將攜紗器的中心坐標儲存在坐標集X中。由于紗錠固定在攜紗器上,在編織過程中,紗線的運動路徑可以使用攜紗器的位置代替。當一個轉動間隔完成后,每一個攜紗器都有一個固定的位置,只要計算出攜紗器在整個編織過程中的所有位置坐標,就能獲得對應在該攜紗器上的紗線的運動路徑,再計算出所有攜紗器的位置,便可獲得編織件中所有紗線的運動路徑坐標。
底盤上的任意一個攜紗器與角輪的接觸情況只有兩種可能:(1)攜紗器在最外層,只有一個面接觸角輪,此時只有1個角輪能夠驅動攜紗器;(2)攜紗器在內層,其有2個面與角輪接觸,則必須判斷哪個角輪對攜紗器進行驅動。因此,可以執行以下操作:首先,在攜紗器坐標集X中選取第一個元素(攜紗器的中心坐標),描述該元素代表的攜紗器的運動軌跡。對于任意一個給定的底盤,攜紗器的初始坐標與所有角輪的中心坐標的位置是相對固定的,因此,由第一個元素的坐標可以計算出與攜紗器接觸的角輪的位置坐標。根據角輪的位置坐標,可以獲取角輪的運動信息,再根據運動信息計算出轉動后攜紗器的位置坐標并將其存儲。一直重復這樣的計算直到完成給定的轉動間隔,此時存儲的坐標會形成一個坐標集,則坐標集中的數據依次構成第一個攜紗器的運動路徑圖。然后,將攜紗器坐標集X中的第一個坐標去除,剩下的坐標中原第二個坐標順次變為第一個坐標,再重復上述操作,獲取第二個攜紗器的運動路徑圖,如此重復直到攜紗器坐標集變為空集,則獲取所有攜紗器的運動路徑圖。攜紗器的路徑計算流程框圖如圖3所示。
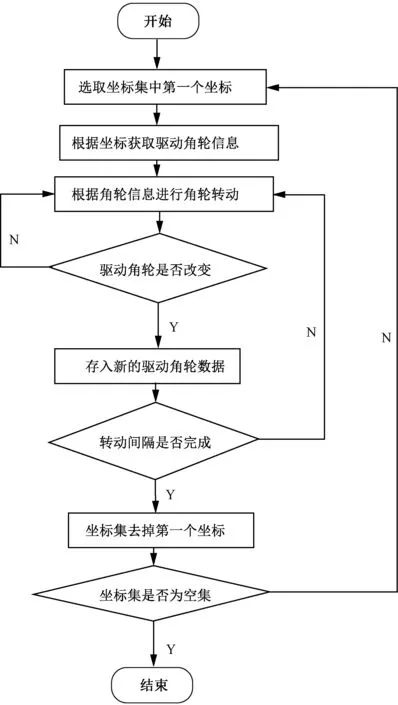
圖3 攜紗器路徑計算流程圖Fig.3 Flow chart for calculating the path of carriers
2.2 紗線空間路徑計算及優化
由于紗線直接由攜紗器驅動,因此理論上紗線的平面路徑圖與攜紗器相同。故而,只需再計算對應攜紗器的平面坐標在編織方向上的坐標,即可得到三維空間的坐標。假設紗線的卷取速度為v,在某一時刻t,紗線軸向坐標h(t)可表示為

(1)
假設攜紗器的平面坐標為(x(t),y(t)),則對應紗線的三維空間坐標為(x(t),y(t),h(t))。由此,可以獲取整個編織件中紗線的空間路徑,將所有坐標點用線段可視化可以得到編織件的骨架,如圖4(a)所示。
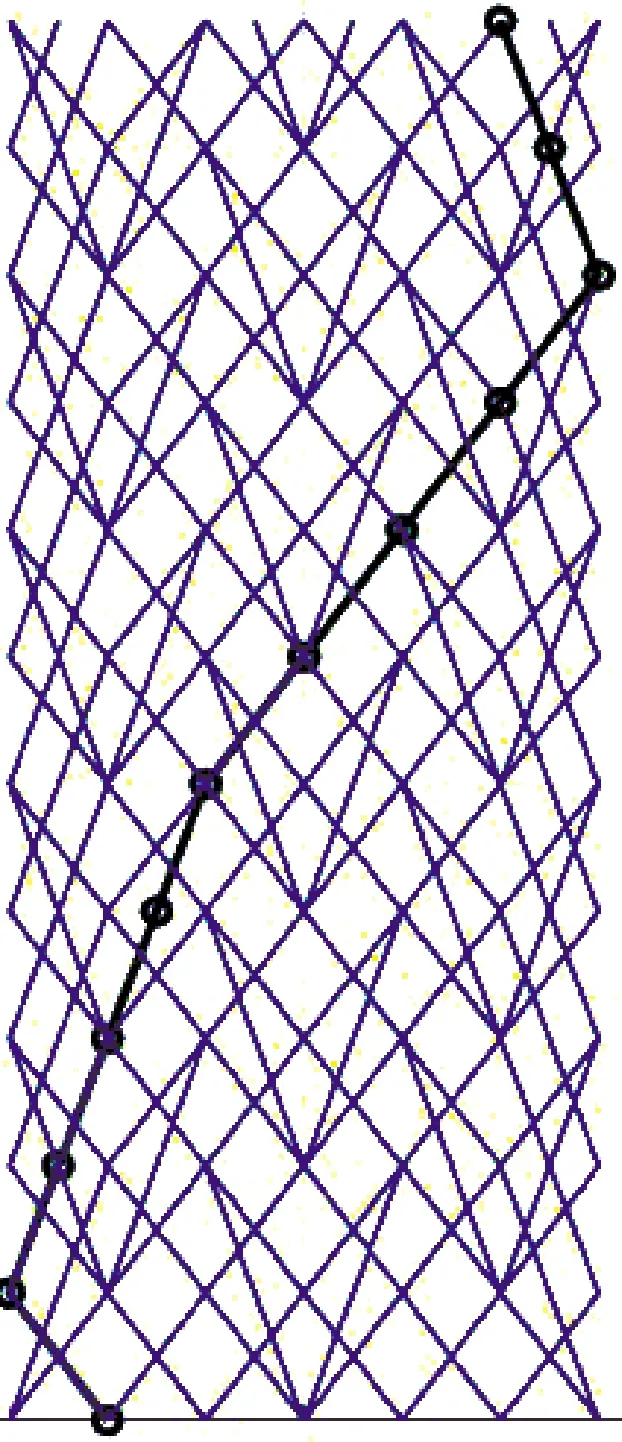
(a) 紗線空間路徑圖
(b) 插值優化后的紗線空間路徑圖4 紗線空間路徑Fig.4 Spatial path of yarns
由圖4(a)發現,編織件結構棱角分明,無法描述編織時紗線平滑、緊湊的狀態,必須進行模擬優化。文獻[8]研究表明,紗線真實軌跡并未完全經過坐標點,且符合B樣條擬合的特點,因此本文采用B樣條對紗線空間坐標點進行擬合。B樣條[14]的定義方法如式(2)所示。
(2)
式中:Pi為控制多邊形的頂點;Ni, k(t)為k階(k-1次)B樣條基函數。設ti為節點,滿足0≤t0≤…≤tn+k-1≤1,則基函數可用式(3)和(4)表示。
(3)
(4)
由式(4)可知,要確定第i個基函數Ni, k(t)需要額外定義k+1個節點,而n+1個控制點要定義n+1個k階B樣條基函數Ni, k(t)。根據以上定義,通過推出4個控制點P0、P1、P2、P3就可以遞推出三次B樣條的基函數,如式(5)所示,則三次B樣條的表達式如式(6)所示。
(5)
(6)
運用上述公式在MATLAB軟件中編寫B曲線優化函數B-curve(X,Y,Z),將平面上的橫坐標存入坐標集X,縱坐標存入坐標集Y,編織方向坐標存入坐標集Z,計算后輸出優化后的坐標集。利用MATLAB軟件中自帶的函數plot 3可以繪制出平滑緊湊的曲線(見圖4(b)),得到編織件的數據模型。
3 結果與討論
3.1 三維編織結構細觀模型構建
優化后的紗線空間路徑與實際的編織結構仍然存在很大差異,根本無法表示真實的紗線狀態。所以,本文將以編織件的骨架為中心,繪制連續等半徑的管狀來模擬紗線的形態。利用MATLAB軟件編寫管狀函數[4]將紗線實體化,在實體化之前必須做如下假設[14]:
(1) 所有紗線橫截面為理想圓形,而且沿紗線軸向方向是均勻的;
(2) 紗線的直徑是相同的;
(3) 編織過程中的擠壓不改變紗線形狀。
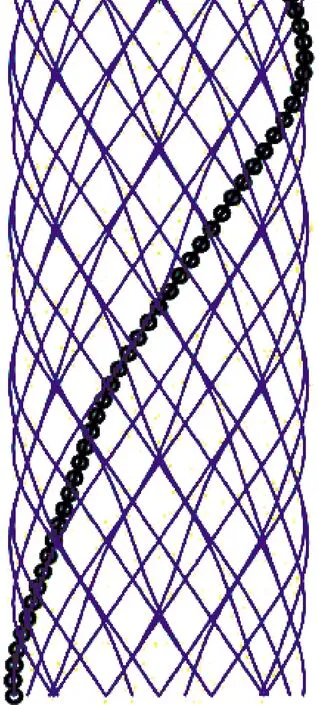
編織件模擬圖如圖5所示。由圖5可以看出,紗線平滑且有序交纏,紗線排列緊密,紗線之間空隙很小。
(a) 編織件效果圖

(b) 俯視圖圖5 編織件模擬圖Fig.5 Simulative braiding structure
3.2 Tsuzuki編織方法與傳統四步法編織路徑對比
四步法是當前發展最為成熟的三維編制技術,文獻[15]給出了四步法紗線在底盤上的投影,如圖6所示。由圖6可以看出,該編織物有4個紗線組相互之間進行交織。
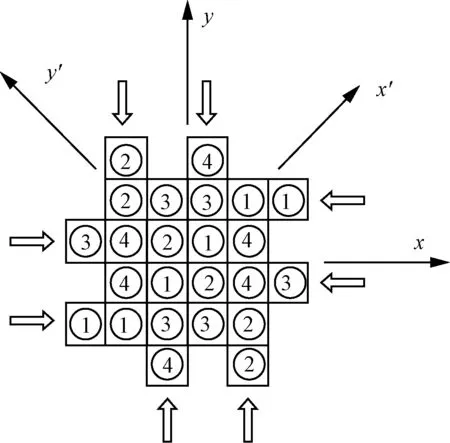
(a) 四步法底盤攜紗器位置
(b) 四步法編織件紗線組投影圖6 四步法底盤與紗線組投影[15]Fig.6 Four-step braiding set-up and projection of yarn traces[15]
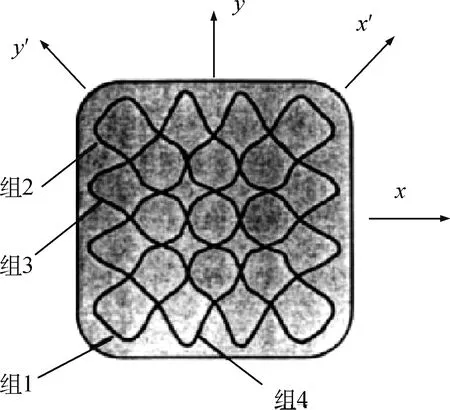
基于Tsuzuki底盤設計,仿照四步法的構造而設計一組4×4的角輪底盤(見圖7(a)),將其分為兩組,第一組標號為1,第二組標號為2。在兩個轉動間隔內,第一組角輪運動信息為1、 0,第二組角輪運動信息為0、-1。將運動信息輸入到仿真模型中,整個編織過程中,兩組角輪分別按這兩個轉動間隔內的運動信息進行重復轉動,可以繪制出紗線空間路徑在平面上的投影(見圖7(b)),采用不同的顏色表示不同的紗線組,可以看出4組紗線的路徑與四步法完全相同。
(a) 角輪底盤結構
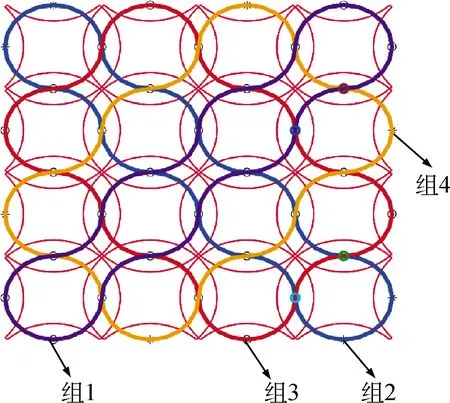
(b) 角輪編織件紗線組投影圖7 Tsuzuki角輪底盤與紗線組投影Fig.7 Tsuzuki horn gears arrangement and projection of yarn traces
由此可知,Tsuzuki旋轉編織機的紗線投影與四步法完全一致,只要控制好卷取速度,便可以用Tsuzuki旋轉編織機來模擬傳統的四步法三維編織結構。
3.3 基于Tsuzuki旋轉編織方法的復雜異型件模擬仿真
結合上文三維細觀模型的構建方法和Tsuzuki旋轉編織原理,設計工字梁與Y型管的編織方案,并利用仿真模型驗證其可實行性。
工字梁角輪位置與示蹤攜紗器路徑如圖8所示。選取一個9×9的角輪底盤,并選取63個角輪和150個攜紗器。角輪轉動與3.2節中相同,將整個底盤角輪分為兩組,兩個轉動間隔內兩組的角輪運動信息分別是1、 0與0、 -1。
圖8 工字梁角輪位置與攜紗器路徑Fig.8 Horn gears arrangement of I-beam and motion trail of carriers
將運動信息輸入仿真模型,在整個編織過程中,兩組角輪分別按這兩個轉動間隔內的運動信息進行重復運動,可以獲取示蹤攜紗器的路徑圖(見圖8)與工字梁的效果圖(見圖9)。由圖9可知,紗線之間交纏有序,工字梁緊湊平滑且交織性好。由此可以看出本文方案是可以實行的。

(a) 俯視圖

(b) 模擬結構圖圖9 工字梁模擬效果圖Fig.9 Simulative braiding structure of I-beam
采用類似的方法,設計一種Y型管,選取一個3×7 的角輪底盤,將底盤分為5組,角輪設置與分組如圖10所示。
圖10 Y型管角輪設置與分組Fig.10 Y-tube’s horn gears arrangement and groups
將運動信息輸入仿真模型中,利用仿真模型獲取 Y型管件的效果圖(見圖11)。由圖11(b)可以看出上半部被分成了兩個相互閉合獨立的子管,由圖11(c)可以看出主管的結構,且分叉處結構緊密,整體交織性好。由仿真模型可知,該編織方案也是可行的。

(a) 正視圖
(b) 俯視圖
(c) 仰視圖圖11 Y型管模擬效果圖Fig.11 Simulative braiding structure of Y-tube
3.4 Tsuzuki旋轉編織法仿真模型試驗驗證
為了驗證模擬結構的合理性,按照角輪編織時的運動規律采用手動編織的方式,用4個角輪和12個紗錠(見圖12(a)),用的紗線為111 tex聚酰亞胺,將12個紗錠按照4個角輪所驅動的方向轉動,并且每運動一步都進行打緊操作,最終成功編織出一條繩狀物(見圖12(b))。使用算法繪制出了該編織條件下編織件的結構模擬圖(見圖12(c)),并且使用日本TM 3000型臺式掃描電子顯微鏡拍攝結構圖(見圖12(d))。將模擬結構與編織結構進行對比,可以看出兩者的結構一致,驗證了算法的合理性。
(a) 編織機編織模型
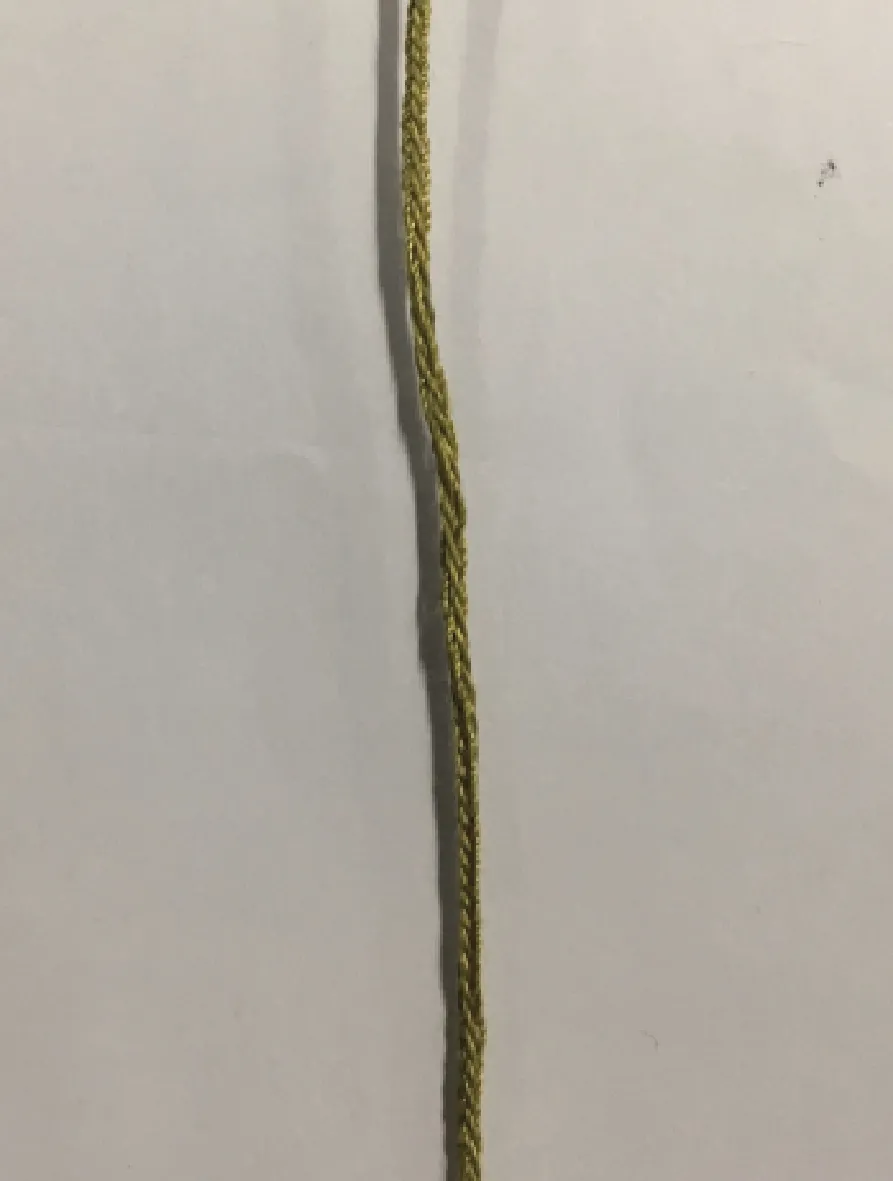
(b) 編織件
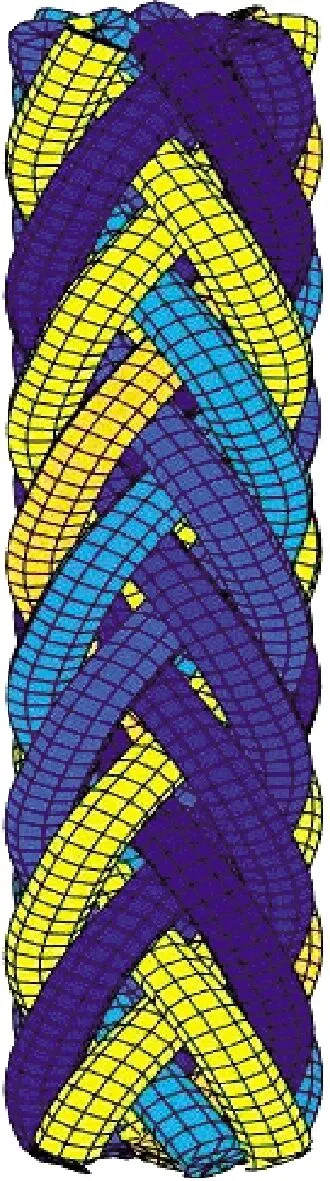
(c) 模擬結構圖

(d) 編織件電鏡圖圖12 編織件模擬與試驗結構對比Fig.12 Structure comparison between simulated and tested real preform
4 結 語
通過研究Tsuzuki旋轉編織機角輪的運動規律,設計一種模擬Tsuzuki編織機編織物細觀結構的仿真模型,可快速、直觀地展現編織物細觀結構,并且通過編織試驗驗證了仿真模型的準確性。此外,利用仿真模型證明了Tsuzuki編織件與四步法編織結構之間的相似性,以及本文設計的工字梁與Y型管結構的可實施性。這種仿真模型具有一定的普適性,能實現各種編織結構的模擬,為今后編織試驗提供可視化參考,也為后續編織件單胞劃分奠定技術基礎。
猜你喜歡
作文周刊·小學一年級版(2025年8期)2025-04-08 00:00:00
環球時報(2022-11-03)2022-11-03 05:18:49
少兒科學周刊·兒童版(2022年10期)2022-06-27 16:36:06
保健與生活(2022年7期)2022-04-08 21:33:36
現代裝飾(2020年11期)2020-11-27 01:47:36
少兒美術(快樂歷史地理)(2019年6期)2019-10-12 08:21:30
啟蒙(3-7歲)(2019年5期)2019-06-27 07:24:54
家庭影院技術(2018年4期)2018-05-09 07:07:54
Coco薇(2017年7期)2017-07-21 07:16:04
創新作文(小學版)(2017年33期)2017-04-04 02:02:20
