基于時域法的經編機電子橫移系統動態性能
2021-12-23 02:29:24王博浩郗欣甫孫以澤
東華大學學報(自然科學版) 2021年6期
關鍵詞:系統
王博浩, 郗欣甫, 孫以澤
(東華大學 機械工程學院, 上海 201620)
近年來,由于電子橫移經編機能夠滿足經編布料產品周期短、品種多、批量小的市場競爭要求[1],國內電子橫移經編機得到飛速發展,但與國外仍存在較大差距,主要表現在國內高速經編機轉速和穩定性不如國外同類產品[2-3]。目前電子橫移經編機的生產轉速遠遠不如花盤凸輪式橫移經編機,因此電子橫移系統的性能成為制約經編機生產效率的主要因素之一[4-5]。
經編機電子橫移系統綜合了電力電子、計算機控制、機械工程等多領域的交叉技術[6],其電氣部分與機械部分存在一定程度的耦合,導致經編機電子橫移系統的理論研究與參數整定存在一定的難度,因此有必要建立精確的電子橫移系統控制模型,以期為該系統的理論研究與性能優化提供一定的理論依據。
國內學者對經編機電子橫移系統展開了一系列理論研究。翟云[4]建立經編機電子橫移系統的數學模型,并利用該數學模型推導出系統的閉環傳遞函數。張琦[5]建立經編機電子橫移系統整體結構的動力學模型,并使用MATLAB/Simulink軟件進行仿真分析。鄭靜等[6]對電子橫移系統的伺服驅動部分和機械部分進行數學建模,并使用MATLAB/Simulink軟件進行仿真研究。然而,這些研究在對經編機電子橫移系統進行建模時,大多數未考慮逆變器環節、反電動勢環節、電流濾波環節、速度濾波環節以及電氣部分與機械部分之間的耦合,導致理論數學模型無法展現實際系統的動態性能。
建立經編機電子橫移系統的電流環、速度環、位置環,以及機械傳動部分的數學模型,采用時域法對系統進行降階處理,分析電子橫移系統參數對其動態性能的影響以及電子橫移系統高速運行時出現振蕩現象的原因,并在MATLAB/Simulink軟件中進行仿真研究,通過試驗檢驗了理論分析的可靠性,研究結果有望為電子橫移系統的動態性能研究以及系統設計提供理論基礎。
1 經編機電子橫移系統簡介
經編機電子橫移系統一般采用交流伺服旋轉電機作為驅動裝置,通過滾珠絲桿將電機的旋轉運動轉化成直線運動,從而驅動導紗梳櫛實現往復橫移運動[7],如圖1所示。由于位置監測裝置不易安裝在橫移梳櫛上,并且梳櫛橫移時產生的振動會影響位置監測裝置信號的穩定性和精度,因此一般電子橫移系統采集電機軸端的輸出轉角作為系統的位置檢測信號。經編機電子橫移系統中常采用電流環、速度環、位置環三閉環控制策略,屬于典型的交流伺服控制系統。

圖1 經編機電子橫移系統結構Fig.1 Electronic shogging system structure of warp knitting machine
2 經編機電子橫移系統的數學模型
經編機電子橫移系統主要由伺服系統和機械系統組成,其中伺服電機直接驅動絲桿,進而驅動梳櫛進行橫移。采集電機軸的輸出轉角作為系統的位置反饋。
2.1 電子橫移系統電氣數學模型
電子橫移系統采用永磁同步電機(permanent magnet synchronous motor, PMSM)作為驅動裝置,電氣部分一般采用電流環、速度環、位置環三閉環控制策略[8-10],其數學模型結構框圖如圖2所示。圖2中:Kp為位置調節器增益;Kfp為位置檢測增益;Tv為速度濾波時間常數;Kfv為速度檢測增益;Kv為速度調節器增益;τv為速度調節器積分時間常數;Ti為電流濾波時間常數;Kfi為電流檢測增益;Ki為電流調節器增益;τi為電流調節器積分時間常數;Tpwm為逆變器時間常數;Kpwm逆變器增益;R為電樞繞組等效電阻;Ts為電樞繞組電氣時間常數;Kt為力矩系數;Ke為反電動勢系數;Jm為電機的等效轉動慣量。
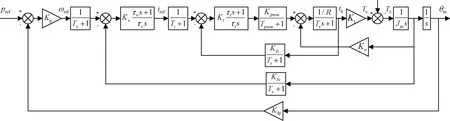
圖2 永磁同步電機三環控制結構框圖Fig.2 Block diagram of three-loop control on PMSM
(1)電流環。從穩態要求來看,希望電流環穩態時無靜差;從動態特性來看,希望電流環跟隨性好,超調量小。因此采用PI控制器作為電流環調節器,將電流環校正成典型的I型環節。忽略電機軸上負載力矩TL和反電動勢對電流環的影響。由于電機的電氣時間常數較大,為提高電流環響應速度,根據零極點對消方法,一般取電流控制器積分時間常數等于電氣時間常數[11],即Ti=Ts,于是可以將電流環等效為二階環節,其閉環傳遞函數為
(1)

(2)

(3)
(3)位置環。位置環以速度環為內環,一般采用比例控制器作為位置環調節器,此時系統為I型系統,當系統的輸入信號為階躍信號時,系統的穩態誤差為0。在電流環和速度環參數確定的情況下,可以通過參數調試法或根軌跡法來確定位置調節器的增益。
2.2 電子橫移系統機械傳動數學模型
電子橫移系統的結構如圖3所示。經編機電子橫移系統的機械系統由聯軸器、滾珠絲桿、鋼絲繩、球鉸、導紗梳櫛等部件組成[13]。經編機電子橫移機構通過滾珠絲桿將伺服電機的旋轉運動轉換為導紗梳櫛機構的往復橫移運動。
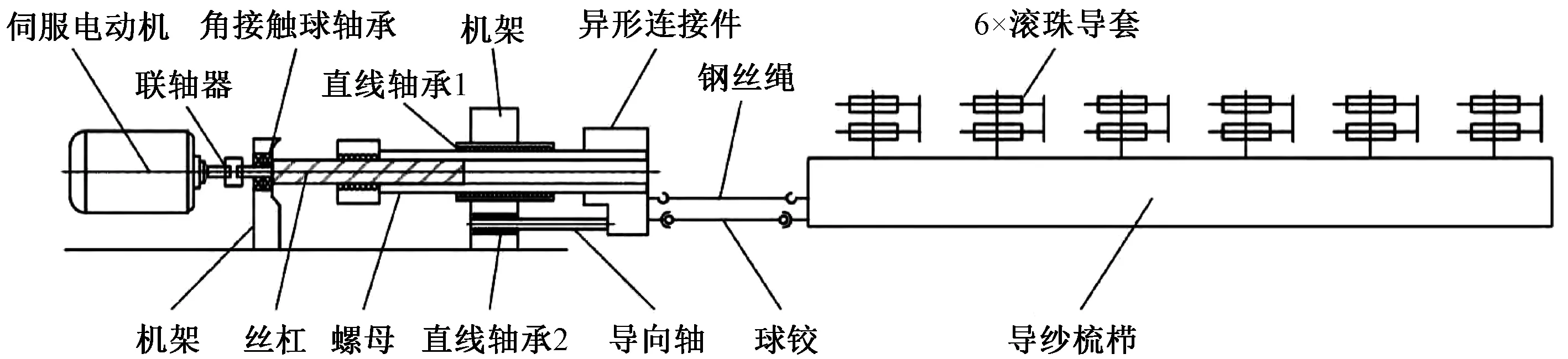
圖3 電子橫移系統結構簡圖Fig.3 Structural diagram of electronic shogging system
依據動力學等效變換原理,可以將整個機械傳動機構的慣量、剛度、阻尼和負載干擾轉矩都折算到絲桿上,簡化得到如圖4所示的二慣量系統[14-15]。
由圖4所示的二慣量系統,建立如式(4)所示的方程組。
(4)

圖4 二慣量系統動力學模型Fig.4 Dynamic model of two-mass system
式中:θm為電機軸輸出的角度;Te為電機輸出的電磁轉矩;Jm為電機的轉動慣量;Tw為傳動軸轉矩;Kl為各機械傳動部件折算到絲杠上的扭轉剛度;Jl為各機械傳動部件折算到絲杠上的轉動慣量;Bl各機械傳動部件折算到絲杠上的黏滯阻尼系數;θl為絲桿輸出的轉角;Tl為折算到絲杠上的干擾轉矩,Xl為梳櫛的直線位移輸出;Pb為絲桿導程。
綜上,最終得到機械傳動部分的結構圖,如圖5所示。
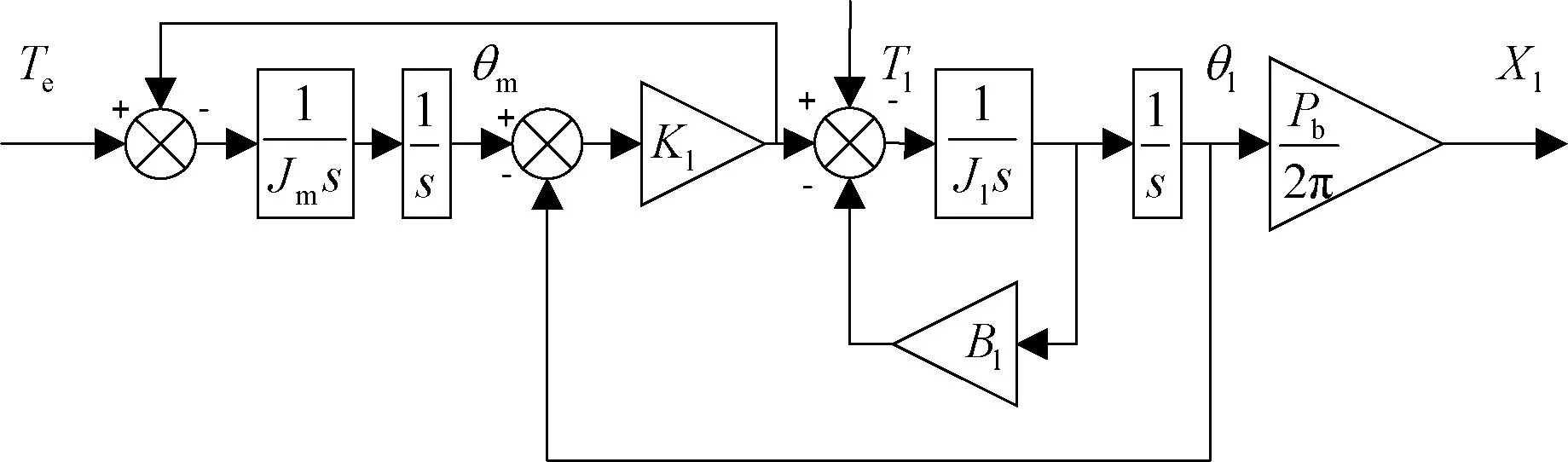
圖5 機械傳動部分的結構框圖Fig.5 Block diagram of mechanical transmission
2.3 電子橫移系統整體模型
將PMSM三環伺服控制的結構框圖和機械傳動部分的結構框圖整合到一起,即可得到經編機電子橫移系統整體的結構框圖,如圖6所示。由此可見,經編機電子橫移系統屬于典型的半閉環伺服進給系統。
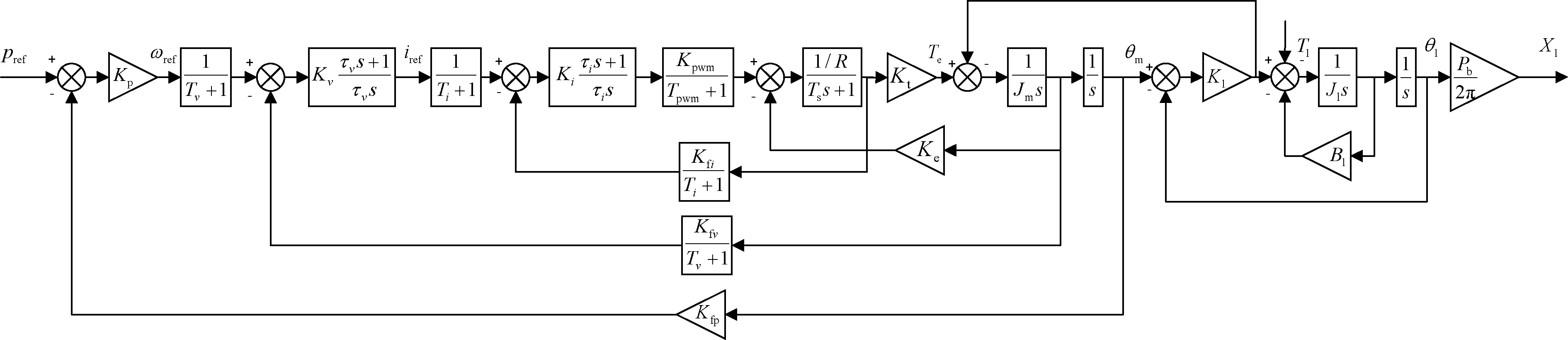
圖6 電子橫移系統結構框圖Fig.6 Block diagram of electronic shogging system
3 經編機電子橫移系統仿真
基于MATLAB/Simulink軟件以仿真的方式驗證圖6所示模型的準確性,并對電子橫移系統中各參數對系統性能的影響進行分析。由于絲桿的輸出轉角θl與梳櫛的直線位移輸出Xl存在倍數關系,為了便于觀測系統的階躍響應,仿真中采用θl作為系統的輸出。
3.1 仿真參數
根據實際工程應用情況,伺服電機選用臺達ECMA-C1-09-10-ES型,并按照第2.1節的方法確定伺服驅動器的參數。設置經編機電子橫移系統仿真參數如表1所示。
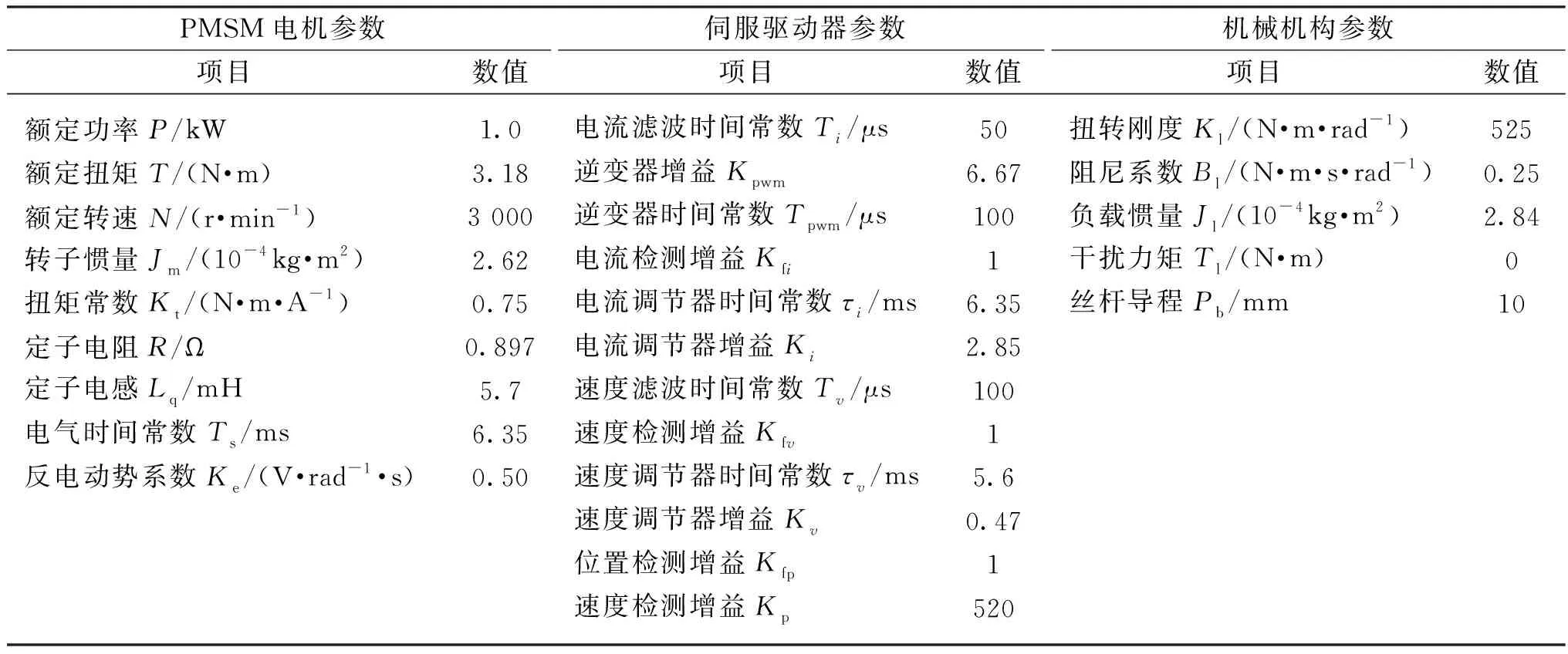
表1 電子橫移系統仿真參數Table 1 Simulation parameters of electronic shogging system
3.2 位置環動態性能分析
位置環主導零極點分布如圖7所示,位置環系統與其降階系統的單位階躍響應曲線如圖8所示。位置環上升時間tr=1.83 ms,峰值時間tp=4.04 ms,調整時間ts=3.32 ms,最大超調量σ=0.11%。
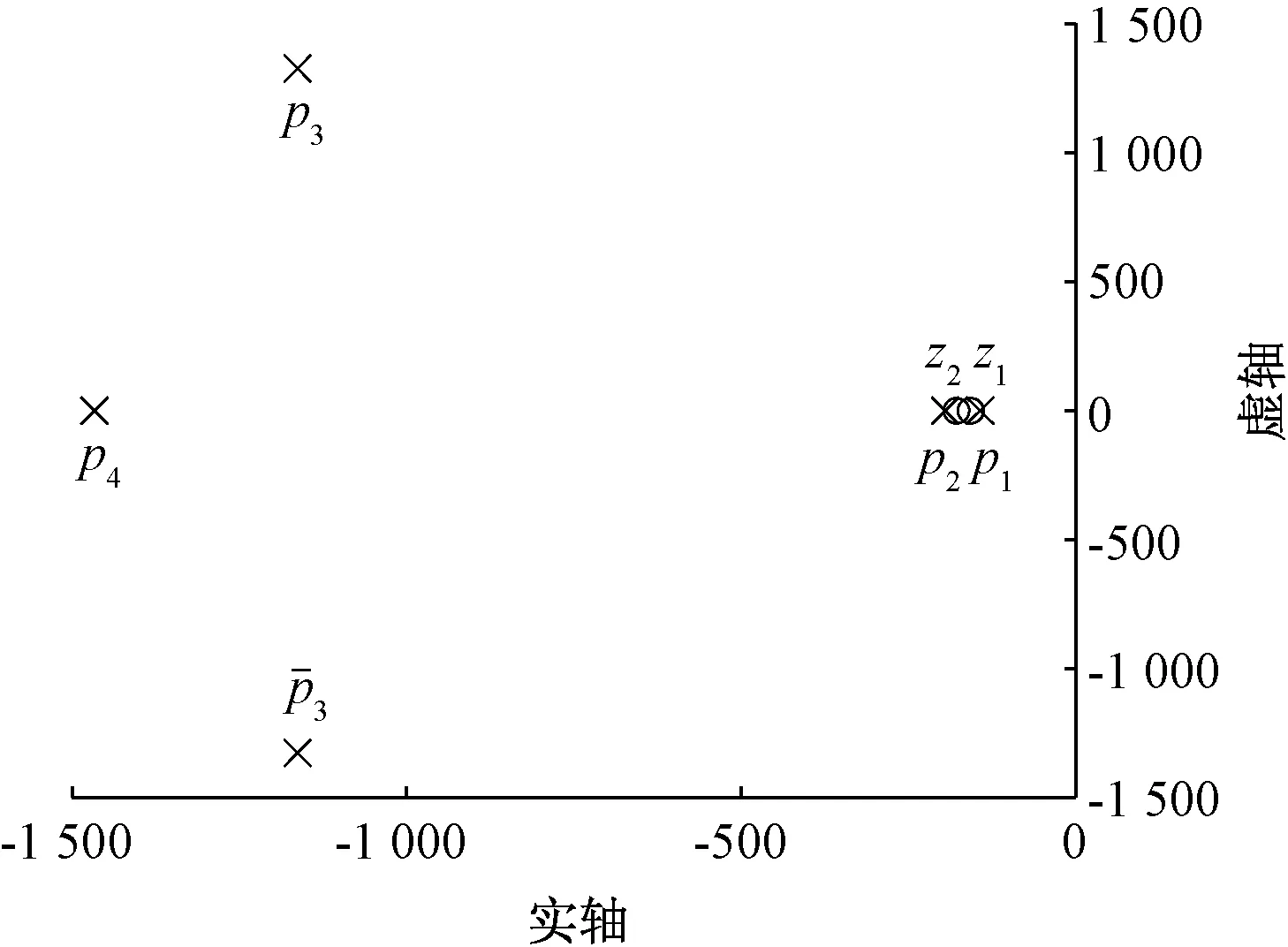
圖7 位置環主導零極點分布Fig.7 Distribution of domain poles and zeros of position loop
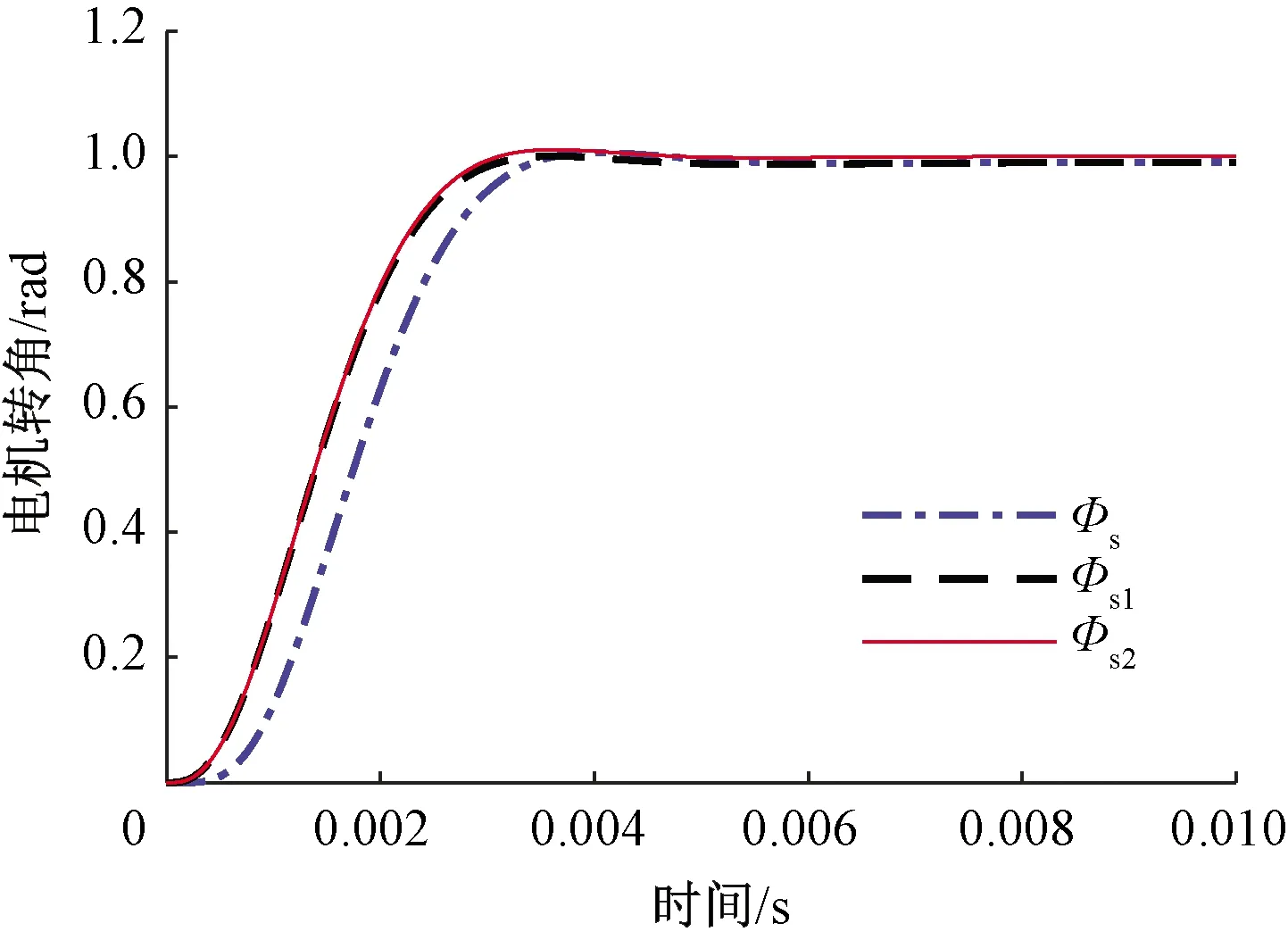
圖8 位置環及其降階系統的單位階躍響應曲線Fig.8 Step responses of position loop and its reduced order systems

3.3 機械傳動部分的加入對系統的影響
電子橫移系統主導零極點分布如圖9所示,電子橫移系統與其降階系統的單位階躍響應曲線如圖10所示。加入機械傳動裝置之后,系統上升時間tr=3.36 ms,峰值時間tp=8.58 ms,最大超調量σ=11%。根據經驗,橫移單次移針誤差超過5%以上便會出現擦針,因此誤差范圍取±5%,系統調整時間ts=14.2 ms。
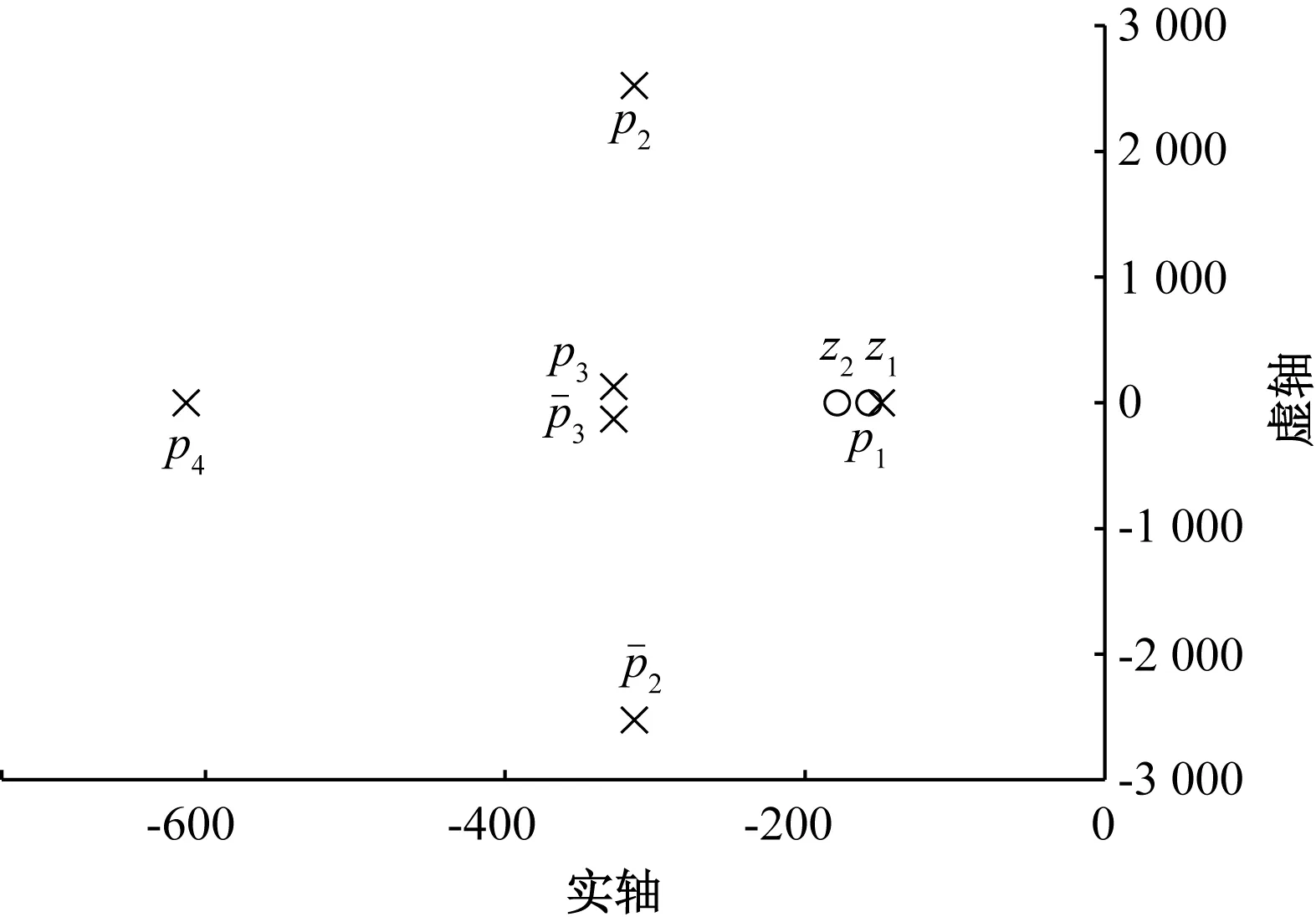
圖9 電子橫移系統的主導零極點分布Fig.9 Distribution of domain poles and zeros of electronic shogging system
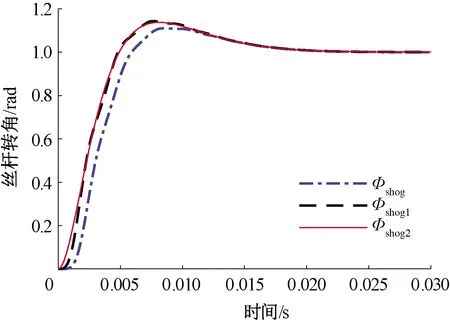
圖10 電子橫移系統及其降階系統的單位階躍響應曲線Fig.10 Step responses of electronic shogging system and its reduced order systems

3.4 位置調節器增益對系統的影響
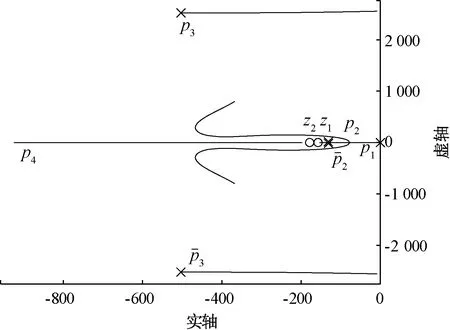
圖11 隨Kp值變化的系統主導極點軌跡Fig.11 Locus of system domain pole varying with Kp
當位置調節器增益Kp取不同值時,電子橫移系統的單位階躍響應曲線如圖12所示。結合上述分析可知,當Kp=100時,系統的主導極點為靠近虛軸、阻尼比小的極點,因此此時系統響應慢,超調量小;隨著Kp的增加,系統的主導極點逐漸遠離虛軸,且阻尼比增加,因此當Kp=600時,系統響應速度變快,超調量增加;但隨著Kp的繼續增大,機械系統引入的共軛極點將逐漸靠近虛軸,因此當Kp=1 000時,系統會發生劇烈的機械諧振現象。
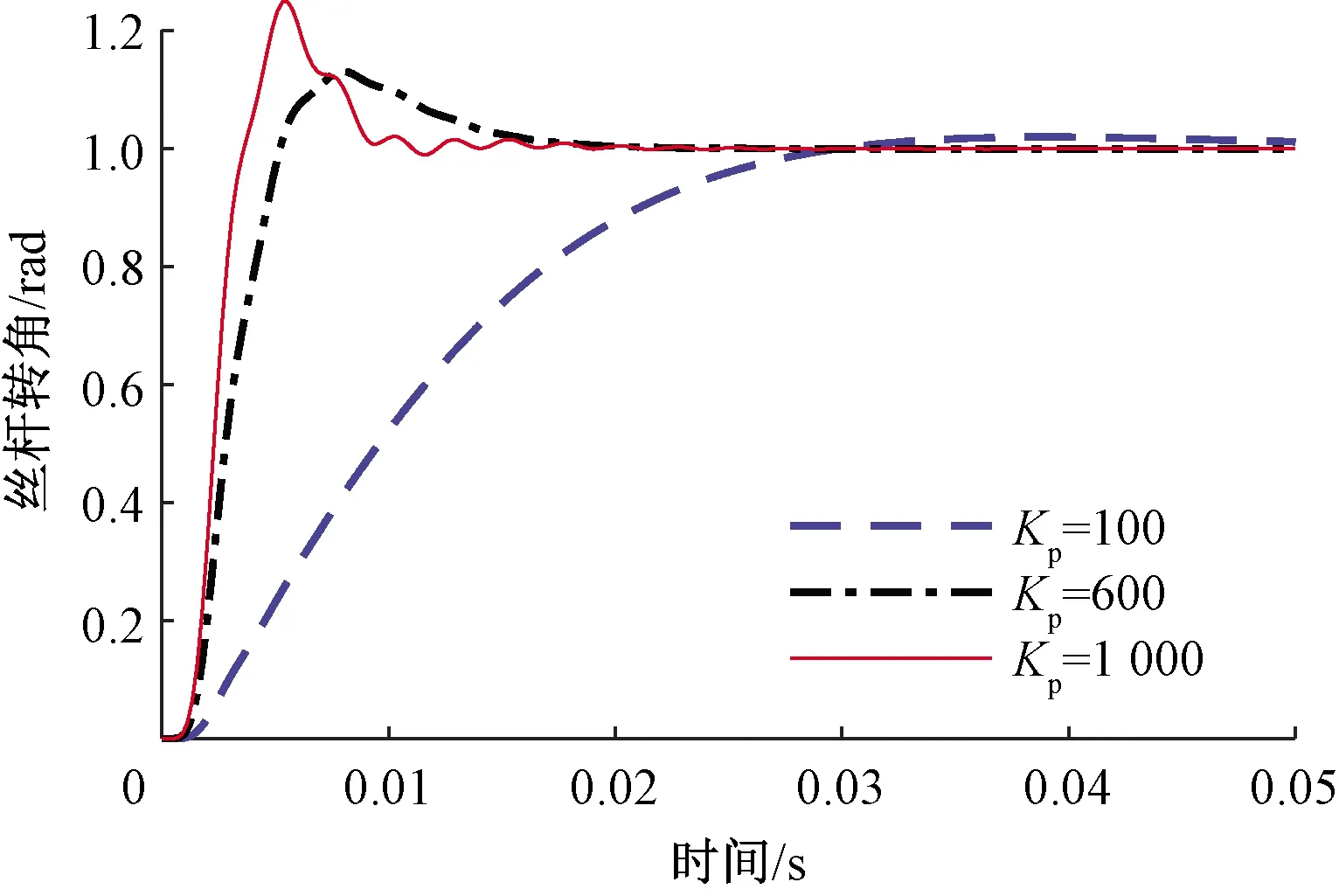
圖12 不同Kp值下的系統單位階躍響應曲線Fig.12 System step responses under different Kp values
3.5 速度環增益對系統的影響
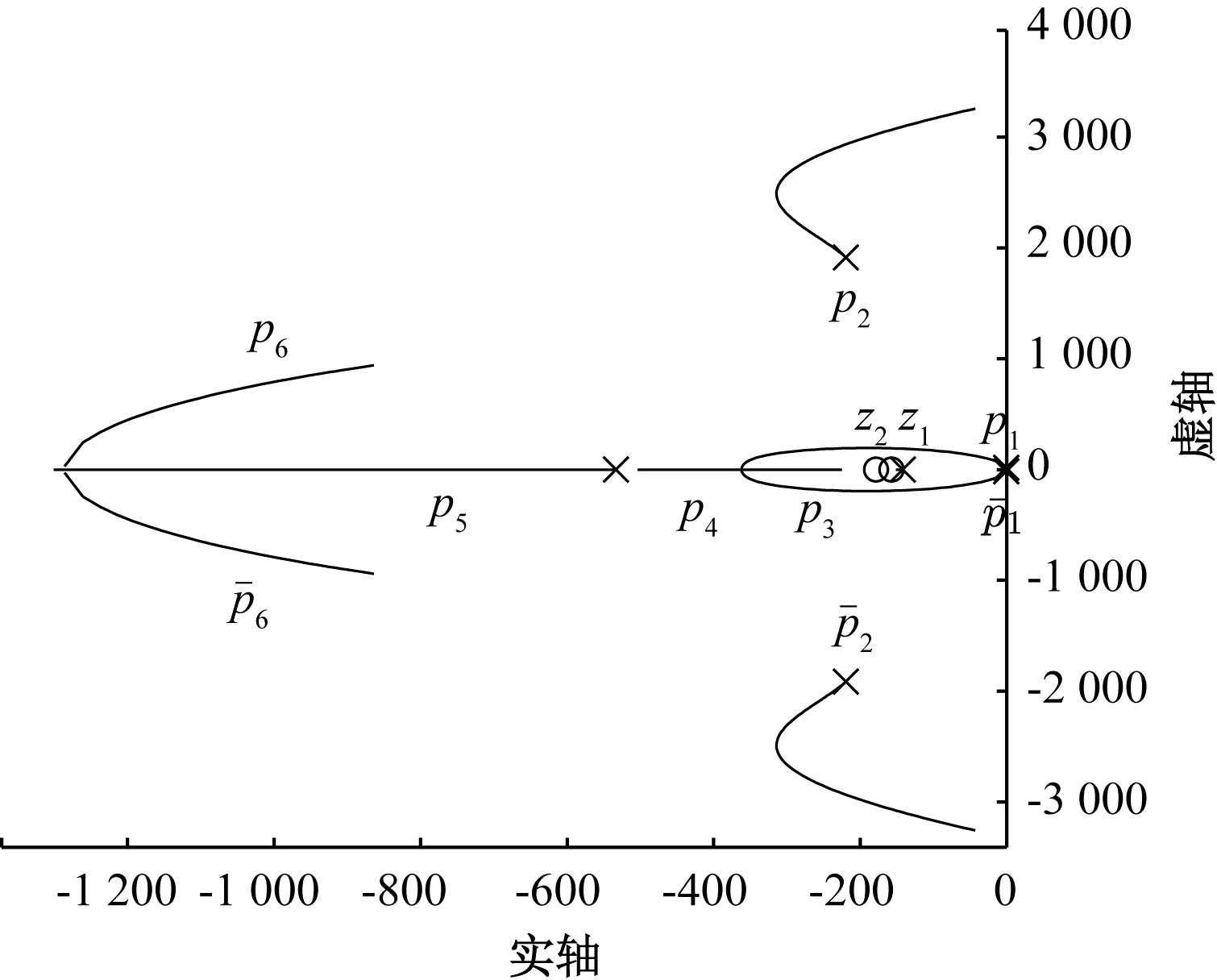
圖13 隨Kv值變化的系統主導極點軌跡Fig.13 Locus of system domain pole varying with Kv
當速度調節器增益Kv取不同值時,電子橫移系統的單位階躍響應曲線如圖14所示。結合上述分析可知,當Kv=0.1時,系統的主導極點為靠近虛軸、阻尼比較大的極點,因此此時系統響應慢,超調量大;隨著Kv的增大,系統的主導極點逐漸遠離虛軸,阻尼比減小,因此當Kv=0.5時,系統響應速度變快,超調量減小;但隨著Kv的繼續增大,機械系統引入的共軛極點將逐漸靠近虛軸,因此當Kv=0.9時,系統會發生劇烈的機械諧振現象。
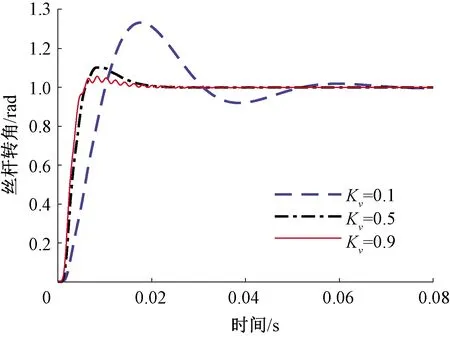
圖14 不同Kv值下的系統單位階躍響應曲線Fig.14 System step responses under different Kv values
4 試驗驗證
以7梳RD7-EL型拉舍爾雙針床經編機為例進行試驗驗證。在雙針床經編機中,主軸每轉一圈,橫移完成2個橫列的編織。由于機械結構的緣故,經編機的最高機速一般取決于橫移梳櫛針前所允許的橫移角度,GB1后針床針前所允許的橫移角度最小,為36°。在GB1梳櫛上執行橫移工藝1-0/1-2//,通過在伺服驅動器中設置不同的位置調節器增益和速度調節器增益,并使用Trio控制器自帶的示波器監測橫移工藝的響應曲線。
不同Kp值下GB1橫移工藝的響應曲線如圖15所示。其中:圖15(a)中,橫坐標每格代表20 ms,當Kp=400時,系統的響應速度慢,超調量較小,針前橫移時間約為24 ms;圖15(b)中,橫坐標每格代表10 ms,當Kp=800時,系統的響應速度變快,針前橫移時間約為10 ms,但此時系統運行過程中伴隨著強烈的振蕩,容易發生擦針現象。
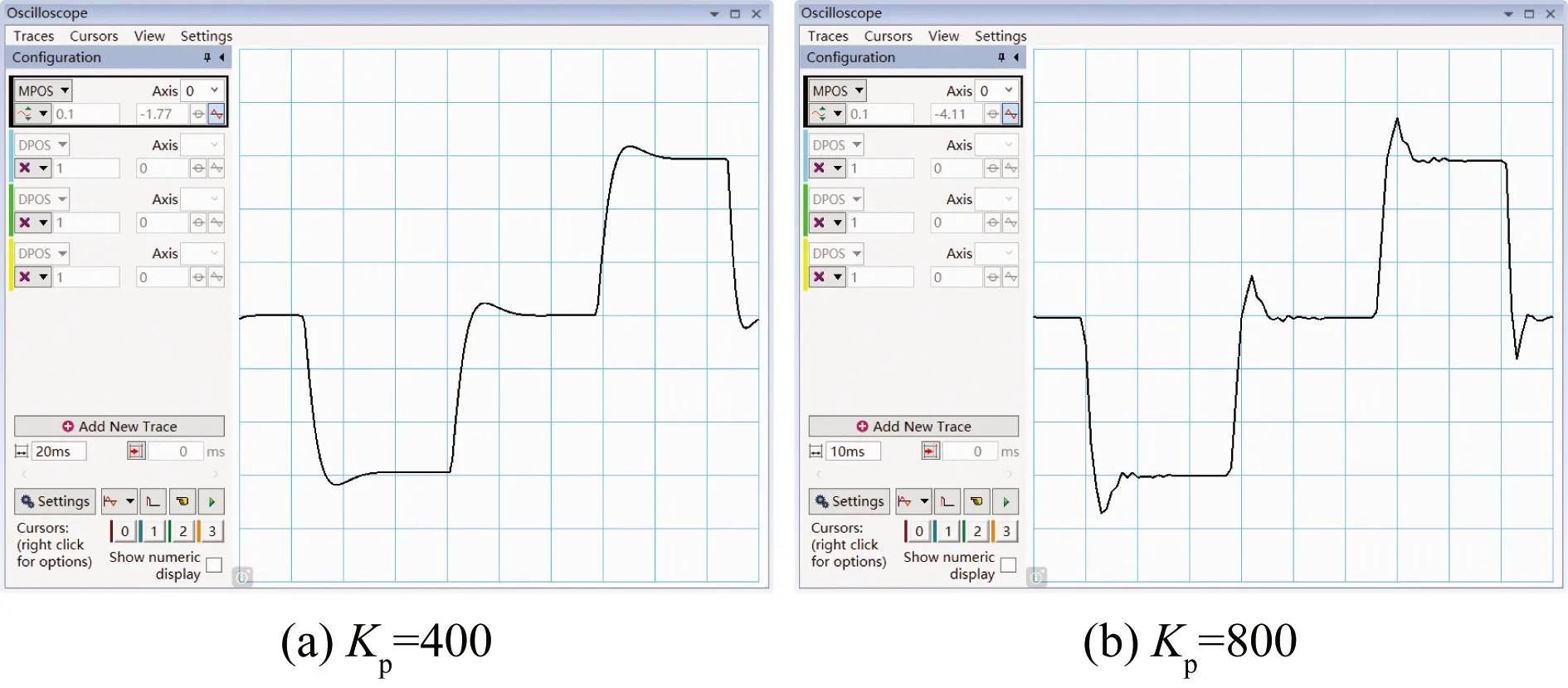
圖15 不同Kp值下GB1橫移工藝的響應曲線Fig.15 GB1 shog craft responses under different Kp values
不同Kv值下GB1橫移工藝的響應曲線如圖16所示。其中:圖16(a)中,橫坐標每格代表20 ms,當Kv=0.3時,系統的響應速度慢,超調量較大,針前橫移時間約為20 ms;圖16(b)中,橫坐標每格代表10 ms,當Kv=0.8時,系統的響應速度變快,針前橫移時間約為12 ms,但此時系統運行過程中伴隨著強烈的振蕩,容易發生擦針現象。
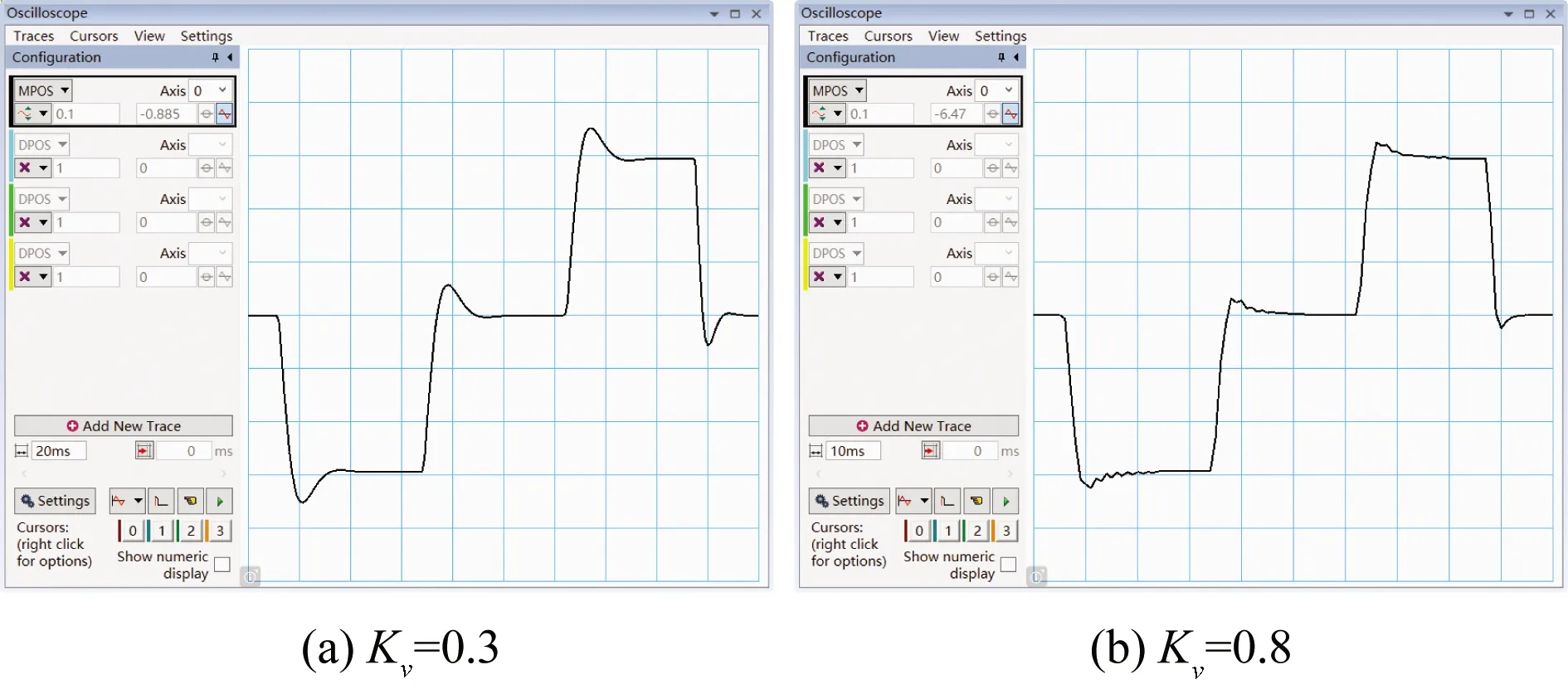
圖16 不同Kv值下GB1橫移工藝的響應曲線Fig.16 GB1 shog craft responses under different Kv values
5 結 論
(1)建立經編機電子橫移系統的數學模型,采用 MATLAB/Simulink軟件驗證模型的準確性和系統的穩定性,仿真結果能夠很好地滿足經編機電子橫移系統的動態性能要求。
(2)采用時域主導零極點方法分析得出,加入機械傳動部分將使得電子橫移系統響應變慢,超調量增大,并且引入一對靠近虛軸、阻尼比極小的共軛復根,使得系統有產生高頻振蕩的趨勢。
(3)時域法仿真分析結果表明,適當增大位置調節器增益和速度調節器增益有利于提高電子橫移系統的響應速度,增大系統的帶寬,但過大的位置調節器增益和速度調節器增益將引發機械諧振現象,使得系統發生振蕩,不利于系統的穩定性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
