關于岸橋電氣驅動和控制系統的基本方式及特點研究
2021-12-24 21:14:33胡穎華
科技信息·學術版 2021年3期
胡穎華
摘要:當前,現代岸邊集裝箱起重機的主要研究方向是電氣驅動和控制系統。通常情況下,依據岸橋發展的基本特點進行統計與研究。分析比較岸橋交流驅動和直流驅動都有各自呈現出來的優點與缺點,到底應該選擇哪種驅動系統需要重點研究基本驅動原理,從而找到其中存在的規律性。
關鍵詞:岸橋電氣驅動;控制系統;基本方式及特點
岸橋設計前期,需要將電氣驅動的具體方案確定下來。第一,方案在實施的時候,必須要將驅動對象負載確定下來,進而也讓負載的特點得到確定。第二,岸橋運動的時候,起重機的起升機構是有負載量的,需要在起重量不變的基礎上讓負載轉矩保持不變。第三,日常工作的過程當中,集裝箱起重機多半時間是空載運行。依據實際特征起重機帶載運行的情況下,也要依據循環功率來實施運行。所以,平時工作的情況下,為讓工作效率得到全面性提高,可以在空載時,讓起重機工作速度不斷加快。
1、直流驅動與交流驅動的分析
1.1直流驅動與交流驅動比較
對于岸橋式起重機,應該同驅動做詳細的比較,系統化的,全面分析直流驅動與交流驅動。岸橋驅動早期是采用直流驅動的方式運行,其優點可以呈現在如下幾個方面。第一,相對較而言,直流驅動,在速率調節方面更好,容易讓電壓主調節作用得以實現。第二,啟動的過程中,轉矩大,但在動態下有很好的響應。第三,起重機在下降的過程中,可以把轉變完成的電能反饋到電網中,從而讓系統效率不斷得到提高,也讓資源得到有效性的節約。另外,在缺點方面,直流電機要比交流電機的結構相對復雜化,而且價格也比較高,維護難度大,所以不適合長期去使用。還有就是直流電機會使力矩變大,造成功率出現不自然的問題。
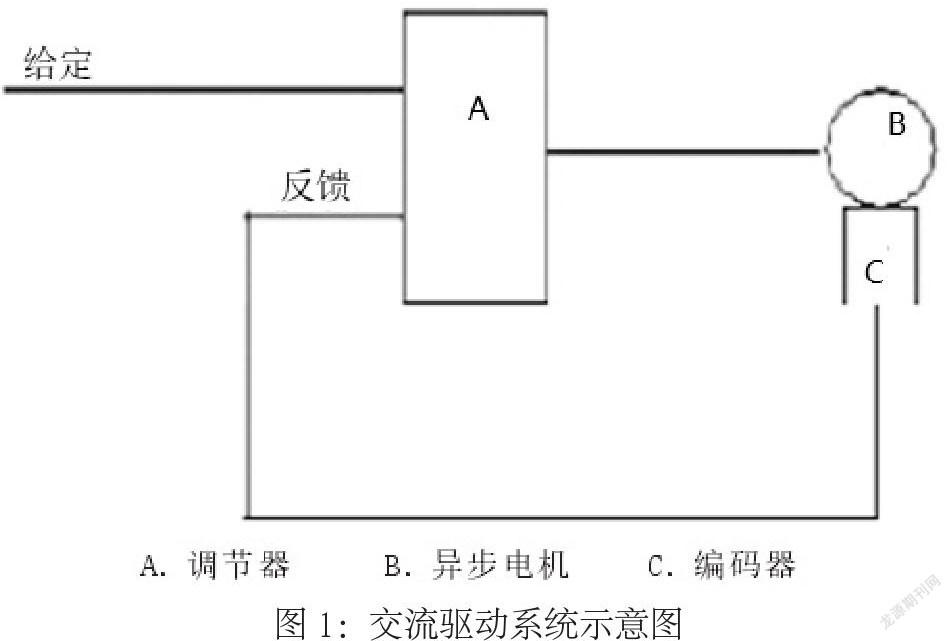
1.2交流驅動系統
驅動系統如圖1所示。
交流驅動裝置應用過程,需要重視啟動過程,交流電機對岸橋運行起到了重要的作用,實際工作開展過程,應根據交流異步電機應用內容,全面確定基本特征。此外,在輸出轉矩運行過程,應重視轉速問題,要明確相關的關系。這樣設備運行時,能加強驅動控制,利于掌握空載與帶載運行信息,從而提高分析水平。
2、岸橋對交流驅動系統要求
岸邊集裝條起重機,有很多結構形式存在,但是最為主要的形式有單箱梁,雙箱梁等。而小車驅動主要包括鋼絲繩牽引式與自動驅動式兩種形式。
針對于重要的起升節點環節,起重機恒功率的控制才是關鍵因素,需要不斷加強重視。起重機在工作的整個過程當中,額定負載的時候,電機轉速就為額定轉速。除此之外,設備負載減少,電機速度就要做出相應的優化與調整。
整個起重機在工作的過程中,變頻器的作用就是利用閉環控制自動檢測負載轉矩,并且也要依據轉矩變化促使恒功率保持在良好的輸出狀態。而起重機空載的時候,可以切實全面提高設備的速度,從而也進一步提高了工作質量與工作效率。
對于運行設備而言,不管是起升還是府仰的機構,都要反饋處理熱能與動能的轉速。通常情況下,可以利用制動電阻消耗能量,但是會對資源有所消耗。另外,合理再利用的方式非常適用,能夠讓能量直接反饋到電網當中,最終實現能量之間的有效性互通。
3、岸橋電氣驅動和控制的基本特征
從岸橋電氣運行實際看,其控制具有一定的特征,基本特征的分析也關系到實際工作的開展,因此要提高認識。岸邊集裝箱起重機,重點研究的技術就是電氣驅動和電氣控制,可以在分析的過程中充分了解到很多方面的特性,因此需要在實際工作當中,格外關注岸橋的方向發展,起升防下墜的功能,以及如何實現半自動與全自動的操作。
3.1岸橋向更重、更高、更長、更快的方向發展
要想岸橋能夠全面發展,更加需要關注幾方面內容。第一,岸橋的重量變大,必然也會影響起重機重量,但根據具體碼頭工作實際,要避免錨頭承受力過大,需要減少起重機重量,實現輕量化發展,此階段需要技術人員提高認識。也就是要意味著要不斷改善速度的驅動效果,從而也進一步提高工作效率。第二,軌上起升高度,隨著集裝箱船舶的優化與改進,軌下升高度也跟著碼頭條件開始優化,如此,岸橋在運行的時候,才會突顯出能量反饋的重要性意義。第三,因為增加了集裝條運輸船舶規模,起升機構的起升高度增加的同時,也會讓小車總行程逐漸加大,從而促使電氣驅動的高效化和穩定化。第四,對于岸橋起升速度而言,參與是較為穩定的,其空載運行的時候通常在固定化的范圍,比如,額載運行是90米/分鐘。另外,根據加速度分析,起動機起升過程應考慮加速功率,通過全面分析,能為變壓器與起升驅動器的選擇提供參考,利于技術人員根據數據信息科學進行分析。第五,比較穩定的參數還有岸橋小車速度,空載與額載,在實際運行的時候都有著比較快的速度。如果想要讓性能指標達到實際要求,需要電氣驅動系統的性能可以保持在良好狀態,從而迅速將功率加以改善。
3.2應該具有起升防下墜功能
以往傳統意義上的起重機需要在實際運行的過程中,具備起升的基本功能,預防出現下落的基本情況。起重機拉起重物的一瞬間,會有短暫的下降現象開始出現,從而在結束下降的過程中再逐漸升起。依據實際存在的現象可以切實體會到存在的不足之處。所以在起重機提升重物的時候,應該科學化,合理化的增加電動機輸出的功率,不斷強化功率下降的瞬間,進一步也讓上升的動力得以增加。
3.3半自動、全自動操作的實現
半自動與全自動技術的應用,為起動機操作提供了技術保證,為了全面實現其技術的應用,應重視從幾方面入手。第一,半自動通過運用到開鎖與閉鎖過程,需要技術人員手動完成,而其他動作也可以利用防搖系統等輔助系統讓自動化得以實現。第二,全自動操作,該方式更加需要借助控制系統,通過全自動模式必然能提高工作效率,也是新時期集裝碼頭發展的重要方向,全自動化是精準的,同時也避免了人為因素的干擾,利于實現岸橋自動循環。一方面可以讓司機工作強度不斷降低,讓分配的勞動資源更為合理化,另一個方面可以全面提高工作的精確度,以及提高整體生產的效率。而半自化,全自動化操作是目前起重機研究的重點所在。
4、結語
總之,通過實踐分析,結合具體工作實際,探索了岸橋電氣驅動和控制系統運行的相關內容,作為技術人員,應結合當前形勢,全面的進行驅動系統分析與應用研究,這樣不僅保證了岸橋電氣驅動和控制水平的提高,也能提高工作效率,利于更加全面的開展管理工作。總之,技術人員要根據岸橋電氣驅動和控制的特征,科學的開展分析,加強技術交流,總結有效的技術應用方法。
參考文獻:
[1]王超,孫琳,陳慧,劉中祥.基于MATLAB的起重機械起升電機調速方式的仿真研究[J].能源技術與管理,2016(01).
[2]蔡峰.ZPMCCHA110-Z系列變頻器在岸邊集裝箱起重機中的應用[J].起重運輸機械,2011(06).
[3]潘超,左健民,汪木蘭.基于前饋及反饋補償的高性能直線伺服系統[J].系統仿真學報,2010(12).
[4]余鳳豪,呂飛,張松濤,吉哲.永磁同步直線電機的數學模型分析[J].艦船電子工程,2010(09).
[5]王國彪,賴一楠,范大鵬,楊華勇,王時龍.新型精密傳動機構設計與制造綜述[J].中國機械工程,2010(16).
[6]張明超,尹文生,朱煜.永磁同步直線電機推力波動建模與抑制[J].清華大學學報(自然科學版),2010(08).
[7]趙瑞芹,田小濤.減小永磁同步伺服直線電機磁阻力的研究[J].煤礦機電,2010(04).
[8]宋玉,陳國鼎,馬術文.交流伺服進給系統數學模型研究及其仿真[J].機械,2010(07)
