
基于Li DAR點云的VBA橫斷面數據自動提取方法
2021-12-27 02:32:24雷剛夏波吳軍
經緯天地 2021年5期
關鍵詞:測量
雷剛 夏波 吳軍
(四川省交通勘察設計研究院有限公司,四川 成都 610017)
0.引言
據國家統計局數據顯示,2010年以來,全國公路總里程大幅增加。2010~2020年全國公路里程由400.82萬km增長至519.81萬km,年平均增長率為2.7%,其中高速公路由7.41萬km增長至16.10萬km,年平均增長率為10.7%。近幾年來,隨著激光雷達攝影測量在各行各業中的不斷應用與發展,特別是在公路設計施工過程,激光雷達攝影測量技術憑借分辨率高、抗有源干擾能力強、低空探測性能好、獲取的信息量豐富、作業效率高等特點,成為道路工程的主要測量技術之一[1]。
為了解決LiDAR點云橫斷面提取等相關問題,國內外眾多學者做了大量工作:Meng X[2]提出了一種基于LiDAR掃面線的濾波方法,該方法適用于對陡峭的地面進行地面提取;YU S J[3]等人根據路面點云數據建立表面模型與影像處理,從而對破損道路路面進行包括斷面提取在內的信息提取;桂仁[4]等人研發了基于OBJECT-ARX2008軟件的公路斷面測量內業一體化處理系統,該系統實現了斷面數據提取、數據格式轉換、數據成圖有機結合;馬捷[5]等人提出一種顧及基于地形特征、LiDAR點云的道路斷面生成方法的道路斷面的生成,它能生成道路廊道三角網模型和估算道路填挖方量;賈博宇[6]等人利用Li DAR點云對京承高速公路橫斷面提取,實現LiDAR點云數據在平坦地區的公路勘察工程中的實踐應用;徐喬[7]等人提出了一種基于LiDAR的復雜山區橫斷面提取方法,該方法使得復雜地形地區橫斷面整體高程精度得到較大提高。
以上解決LiDAR點云橫斷面提取的方法均是在對點云建立三角網模型的基礎上進行橫斷面提取的。本文在總結前人橫斷面數據獲取方法的基礎上,提出了無須對地面點云建立三角網模型的VBA算法,而是對CAD進行二次開發,融合利用現場實測高程點,從而實現了道路橫斷面數據的激光雷達點云自動提取。
1.橫斷面數據獲取方法的比較
在現在的道路工程設計施工中,橫斷面數據是道路設計施工人員在設計施工中不可缺少的基礎數據。橫斷面數據獲取一般分為以下三種情況:
(1)橫斷面數據現場實地測量:橫斷面數據現場實地測量是外業測量人員利用全站儀、RTK等測量儀器,根據坐標、橫斷面方向進行實地三維坐標數據采集。該方法得到的數據準確可靠,但是由于路線長度長,需要大量的外業測量人員,并且作業時間長,而且由于是人工采集,測量人員在山勢陡峭地區難以到達,故造成部分斷面數據缺失,在最后的測量結果中無法準確反映實際地形變化情況。
(2)利用地形圖進行橫斷面數據提取:主要利用地形圖中的等高線結點和高程點建三角網,可以內插提取橫斷面。該方法作業方便、速度快,但因等高線擬合后是實際地形降精度的產物,加之地物密集區地形圖等高線過度修剪,造成三角網空洞區,導致數據可靠性低,無法準確反映實際地形。
(3)利用LiDAR點云進行橫斷面數據提取:指通過點云數據進行點云分類后的地面點云數據進行數據采集。Li-DAR點云密度大,高程精度高。該方法作業方便、速度快、數據可靠性高、在山勢陡峭地區也能精確提取地形點三維數據,所以可以保證地形變化的連續性。
2.基于LiDAR地面點云的VBA算法
2.1 點云數據處理
在地面線提取之前,需對原始機載點云數據進行坐標系轉換,點云自動分類處理,人工檢查分類后得到最終精確地面點云。然后對地面點云按研究區域進行裁剪,并將裁剪后的地面點云進行數據格式轉換(*.dxf)以便導入CAD。
2.2 算法思路
常規算法是將所有地面點建立三角網數模形式存儲,使用的時候調用內插,如緯地軟件建立DTM使用三角網形式存儲,但在工程實踐中存在三方面問題:一是基于高密度的LiDAR點云數據,數據量大,一條100公里公路帶狀地形Li-DAR點云多達幾十個G或更大,對于點云數據的高效利用非常不便,且建網過程慢,軟件支持導入數據量有限,只能分段處理;二是常規點云斷面數據處理難以融合現場采集數據,斷面線需要人工修改,對于局部工點點云密度不足的情況,內插精度不高,人工補測的數據添加難以快速融合利用;三是使用點云建網獲取斷面的使用人員多為線路設計人員,跨專業使用要求程序簡單快捷。
針對以上工程實踐中的問題,本文提出先定點,再在該點附近查詢包圍該點的合適三角形過程的方法,大大縮減參與建三角網的地面點數量,更靈活地添加實測中樁和局部斷面實測點綜合生成斷面線,提高斷面線自動獲取速度和質量。
本算法是通過三角形內插法獲取高程信息的(如圖1所示):
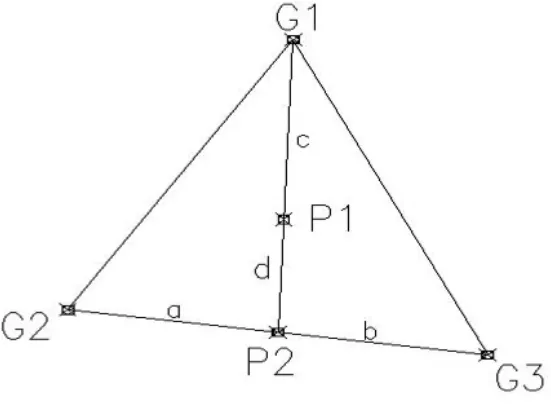
圖1 三角形內插法示意圖
根據需要提取高程的坐標位置P1,查詢附近的LIDAR地面點云,得到三個地面點(G1、G2、G3),此三點構建的三角形包含P1點,連接G1和P1,并延伸與G2G3相交得到P2點,首先計算出P2點的高程,P2=G2+(G3-G2)*a/(a+b),然后計算出P1點高程,P1=G1+(P2-G1)*c/(c+d)。
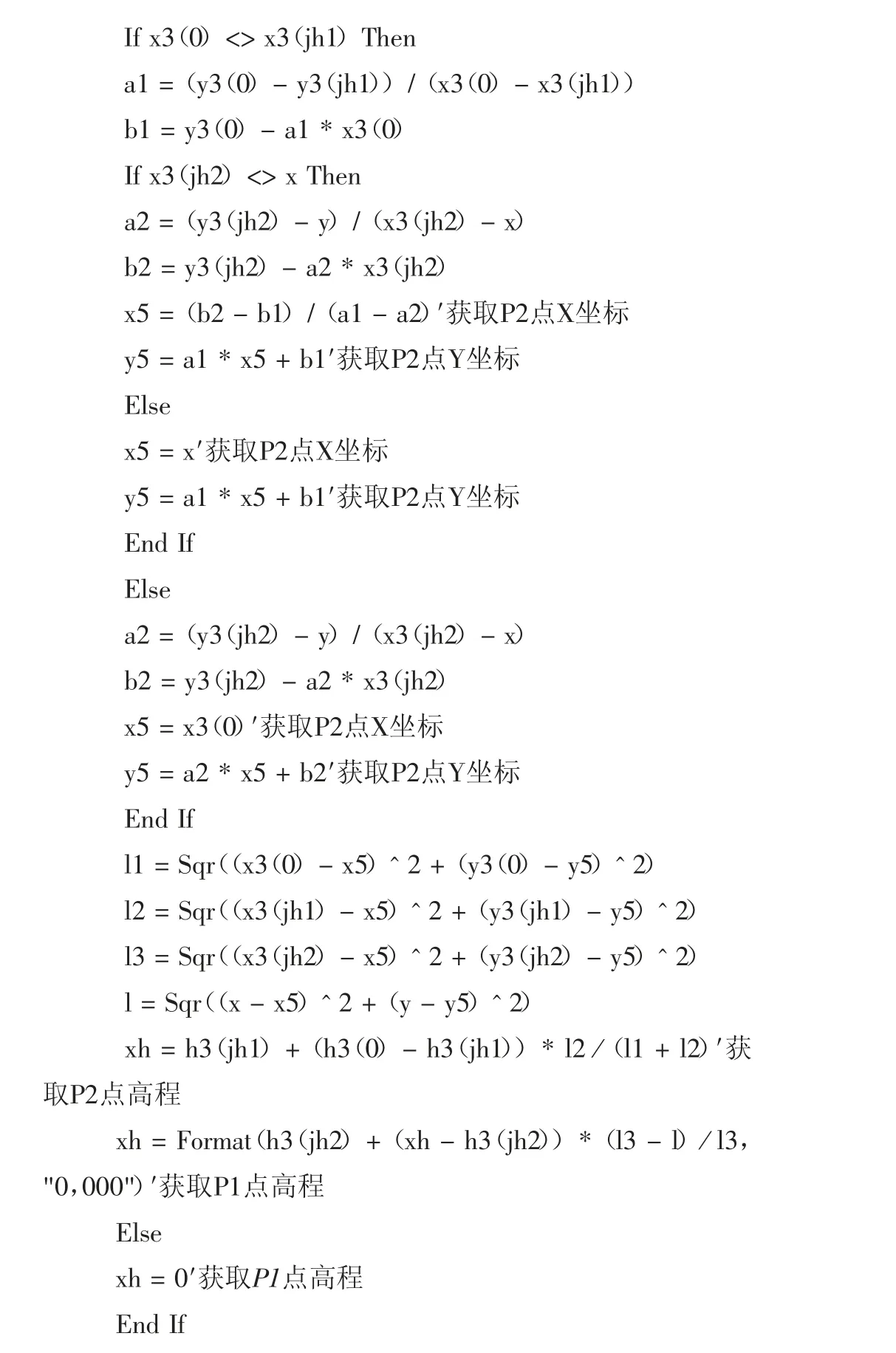
算法源代碼:
2.3 程序設計流程
根據需求功能,設計程序流程(如圖2所示):

圖2 程序設計流程圖
2.4 程序模塊功能介紹
2.4.1 數據導入模塊
該模塊可導入逐樁坐標和實測中樁數據,逐樁坐標格式為*.lst|*.csv|*.dat,中樁數據格式為*.csv|*.txt|*.dat,并進行路線生成。
2.4.2 數據處理模塊
該模塊實現中樁點云高程自動獲取,任一點點云高程自動獲取,橫斷面線生成,橫斷面節點點云高程自動獲取。橫斷面線可設置左右任意邊距長度生成,橫斷面節點可設置任意間距生成。本模塊在節點高程自動獲取過程中無須對整個點云數據建立不規則三角網模型(TIN),只須按待獲取點云高程的點坐標位置查詢附近指定范圍點云,按最優效果獲取三角形,并對其進行高程內插得到該節點點云內插高程。
2.4.3 數據精度統計與手動修正模塊
該模塊是將自動獲取的中樁點云高程與實測中樁高程進行比較,可統計高差在小于10cm、小于20cm、小于30cm的中樁百分比,顯示最大高差及其中樁樁號,并查詢中樁點云高程為0的中樁樁號,最后對查詢后的高程為0點云高程中樁進行手動內插高程修改。
2.4.4 數據輸出模塊
該模塊可輸出中樁點云高程、任意一點點云高程、橫斷面數據。其中點云高程輸出格式為*.dat|*.txt|*.csv,橫斷面數據可按實測中樁高程生成,也可按點云中樁高程生成,數據格式按緯地橫斷面格式輸出(*.txt)。
3.案例分析
3.1 案例介紹
西南地區某高速公路擴容工程施工圖勘察設計項目,主體工程建設里程約77.8km,測量要求機載LiDAR航測按照1∶500比例尺精度控制,配合車載LiDAR點云掃描。該項目地處四川盆地東側,為山嶺地帶,地形起伏大,植被覆蓋率高,地物眾多,橫縱斷面數據人工測量效率極低,測量人員4人一組,日平均采集橫縱斷面數據不超1公里。在施工圖設計周期僅100多天的情況下,測量數據的獲取時間直接決定著設計周期的長短,機載LiDAR航測和車載LiDAR點云掃描的點云密度極高,路面點云密度到達平均每平方米400個點,其余測區平均每平方米17個點,點云數據量極大,常規軟件建網模式難以處理。使用該程序定點查詢三角形能夠提高橫縱斷面數據獲取效率,減少外業采集工作量,有利于提高設計效率和縮短設計周期。
前期工作已采用機載LiDAR按照1∶500精度航測和1∶100車載LiDAR掃描獲取測區原始點云數據,經過坐標轉換、分類處理、機載車載融合得到項目獨立坐標系下的地面點點云成果,地面點點云示意圖(如圖3所示)。橫縱斷面數據在Li-DAR地面點中自動獲取的方式,是按照橫縱斷面點附近地面點數據內插得到的。為保證程序運行結果的準確性,內插點數據的絕對精度必須得到充分保證。內插點誤差來源,總體來講分三方面:(1)地面點云的絕對精度,包含機載車載點云的接邊融合精度;(2)地面點分類的準確性,若含有未分掉的植被點等,會直接影響內插點精度;(3)地面點點云密度,對于高低起伏大的地區,點密度大大影響內插點精度。
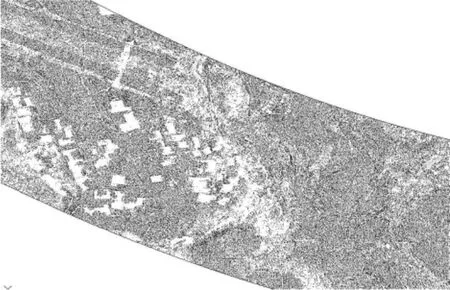
圖3 地面點點云示意圖
本案例選取部分地形特征段落點云數據,用于公路施工圖設計精度分析。經過現場實測檢查點對點云進行精度驗證,得到點云絕對精度統計(如圖4所示)。點云高程中誤差為0.067m,平面中誤差為0.156m,原高速公路外點云平均密度為17點/平方米,原高速公路路面點云密度為400點/平方米,滿足1∶500精度要求。
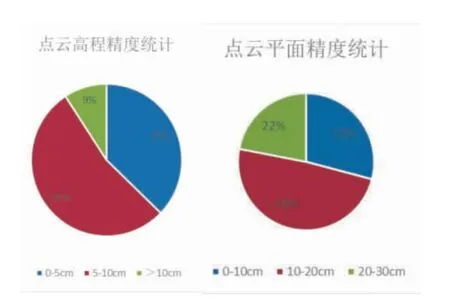
圖4 點云高程平面精度檢查統計
本案例選取路線長度0.6km做實驗分析,使用VBA程序進行基于LiDAR地面點點云運行獲取中樁橫斷面數據,運行結果效果圖(如圖5所示):
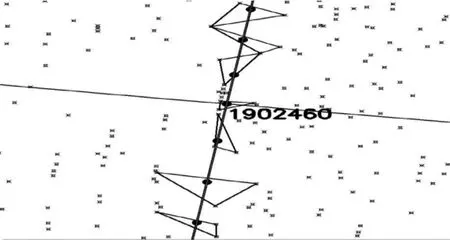
圖5 程序運行后效果圖
3.2 效果分析
經過LiDAR點云自動提取橫斷面與實測橫斷面的比較分析,在普通地形條件下,LiDAR點云自動提取橫斷面與實測橫斷面基本一致(如圖6所示),效果良好,在陡峭地形條件下,LiDAR點云自動提取橫斷面比實測橫斷面更能準確反映實地地形(如圖7所示)。(圖6、圖7中實線為實測橫斷面,該數據由GPS-RTK實地采集,虛線為LiDAR點云自動提取橫斷面):
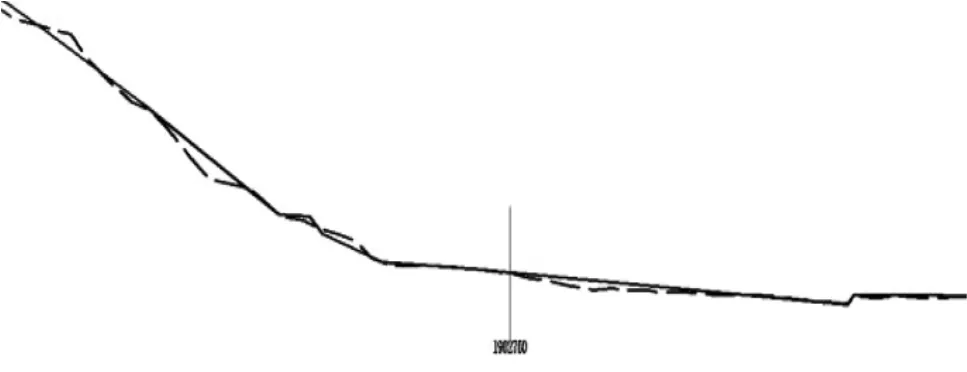
圖6 普通地形橫斷面比較
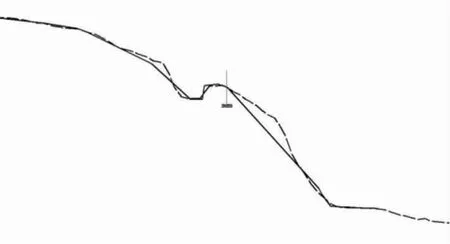
圖7 陡峭地形橫斷面比較
3.3 精度評價
根據《公路測量規范》(JTG C10-2007),利用野外實測地面數據建立DTM的精度是根據地形類別來劃分,具體的指標是根據地形類別、采樣密度、DTM內插處理的精度等控制因素綜合確定的。根據公路工程項目實際應用野外實測數據建立DTM的經驗,在采集密度沒有明顯增加、地面植被較為稀疏的條件下,在重丘區及山嶺區采集地面數據建立DTM的高程插值精度可以控制在0.3m之內。但在地形特別復雜、地面植被密集導致采樣密度變小的情況下,要想獲得較高的DTM高程插值精度就比較困難,因此規范中確定的重丘區及山嶺區采集地面數據建立DTM的高程插值精度(中誤差分別為±0.5m、±0.7m)是一個綜合指標,也是客觀可行的。以野外實測數據生成DTM,其高程插值相對于實測高程點的高程中誤差應滿足《公路測量規范》(JTG C10-2007)規定(如表1所示):
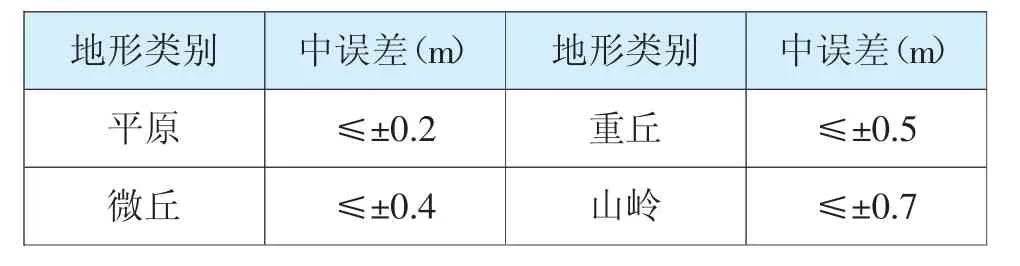
表1 野外實測數據的DTM高程插值精度
機載LiDAR點云數據獲取符合野外實測定性,故精度評價時可參照此標準執行。以實測斷面地形點為對比點云內插高程,進行高程對比分析。本案例地處山嶺地帶,路線長度0.6km,橫斷面31條,實測采集地形點535個,共535個高程點。點云數據內插值與實測值對比精度統計(如表2所示):
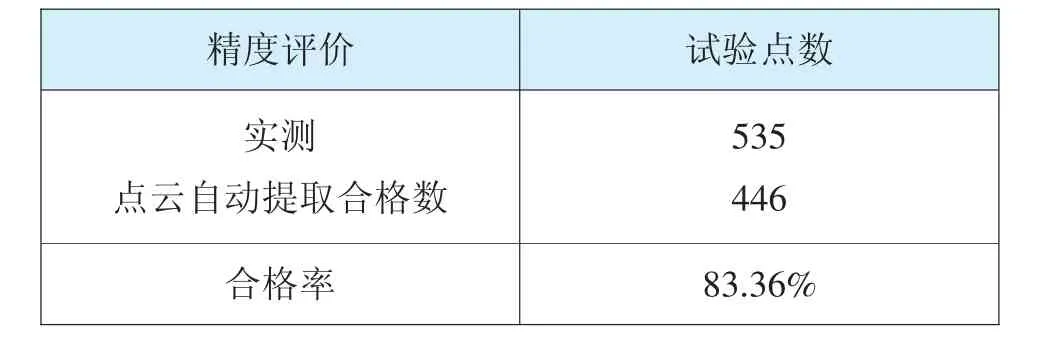
表2 精度統計
4.結論
通過實驗段數據程序運行對比分析,使用該VBA程序基于Li DAR點云自動提取橫縱斷面數據具有以下優勢:
(1)從3.2效果分析中可以看出本程序在LiDAR地面點云中自動提取的橫斷面能夠滿足道路設計精度要求,在陡峭地形條件下,LiDAR地面點云中自動提取的橫斷面比實測橫斷面效果更加良好;
(2)本程序算法無須對整個點云數據建立TIN網模型,只需查找需內插高程的坐標位置附近的點云并建立單個三角形內插高程即可,大大降低了計算機運行負擔;
(3)在效率方面,本案例路線長度0.6km,中樁31個,橫斷面寬度兩側共100m,自動提取橫斷面時間花費11min,人工實地測量預計耗時兩到四小時,可見自動提取橫斷面效率更高,是人工實地測量的11倍至21倍;
(4)在數據處理精度方面,本程序自動提取點云數據內插值合格率高達83.36%。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
